3PSS/S并聯(lián)機構(gòu)運動誤差預估與補償
2020-03-12 10:01:00侯雨雷張國興張繼永魏曉晨曾達幸
燕山大學學報 2020年1期
關(guān)鍵詞:模型
侯雨雷,張國興,張繼永,魏曉晨,曾達幸
(燕山大學 機械工程學院,河北 秦皇島 066004)
0 引言
并聯(lián)機構(gòu)誤差涉及鉸鏈安裝位置、桿長尺寸以及構(gòu)件彈性變形等多種因素,其綜合作用制約著并聯(lián)機構(gòu)在高精度和高可靠性領(lǐng)域的應用[1]。進行并聯(lián)機構(gòu)誤差分析、預估與補償是削弱并聯(lián)機構(gòu)誤差影響、提高其精度的有效途徑。
國英語文學教授利蘭·萊肯在他的《圣經(jīng)文學導論》中說:“原型情節(jié)主題分為尋求主題、死而復生主題、成長主題、犯罪與刑法主題、關(guān)于試探性主題等十二個主題”[9]阿斯科爾尼科夫在酒場喝酒時多次提到以拿破侖為代表的那些前期殺人但是后來有所成就的人,并在不經(jīng)意間表露出自己也想成為那樣的人。這是對社會的一種探索,他不惜以犯罪來抵觸現(xiàn)行社會不合理的原則。勇敢的探索新的價值觀念。他將自己殺死阿謬娜的行為當做踩死虱子的行為。他努力去改變現(xiàn)行社會思維。鏟除社會中不合理的存在。正是對社會不合理因素的拷問,努力探求新的社會秩序。
諸多學者針對并聯(lián)機構(gòu)誤差問題開展研究。Yu等[2]利用幾何方法建立了3自由度并聯(lián)機器人位姿的誤差模型。郭金偉等[3]對一種冗余驅(qū)動過約束并聯(lián)機構(gòu)連桿進行柔性化處理,獲得了機構(gòu)約束力誤差參數(shù)。馮澤民等[4]通過仿真分析與理論計算研究了機構(gòu)水平提升和前后緩沖運動的誤差。Briot等[5]建立了3T1R并聯(lián)機器人運動位姿誤差模型。He等[6]對指數(shù)積公式用于誤差建模進行了研究。Wu等[7]研究了機構(gòu)裝配誤差與鉸鏈間隙對動平臺的定位精度的影響。文獻[8]指出合理設(shè)定運動副間隙對機構(gòu)平穩(wěn)高精度運行有重要影響。Chebbi等[9]基于虛功原理構(gòu)建含鉸鏈間隙影響的位姿誤差模型,分析了由鉸鏈間隙引起的位姿誤差。Tsai等[10]研究了平面機構(gòu)運動副間隙與末端定位精度的關(guān)系,對外部載荷作用下機構(gòu)間隙誤差進行了預測。
[2] Fang Tian, “Trump reportedly approves US Navy’s annual operation plan in South China Sea”, People’s Daily Online, July 25, 2017, http://en.people.cn/n3/2017/0725/c90000-9246195.html.
高峰等[11]以分析混聯(lián)機構(gòu)的幾何誤差作為理論基礎(chǔ),基于ADAMS軟件建立了含有全部幾何誤差參數(shù)的虛擬仿真平臺,分析機構(gòu)各項誤差參數(shù)對平臺末端運動精度的影響。許允斗等[12]對鍛造操作機主運動機構(gòu)進行建模,基于MATLAB遺傳算法工具箱對機構(gòu)進行優(yōu)化設(shè)計,實現(xiàn)運動軌跡優(yōu)化和誤差的控制。譚興強等[13]分析了不同運動模式位姿誤差,通過嵌入誤差估算程序,實現(xiàn)對機構(gòu)的位姿誤差補償。盧菊洪等[14]在直接誤差補償和工作空間補償基礎(chǔ)上,對并聯(lián)機構(gòu)誤差進行補償。謝平等[15]以Stewart機構(gòu)為研究對象,基于ADAMS和MATLAB進行仿真研究,修正了期望軌跡偏差,實現(xiàn)對并聯(lián)機構(gòu)誤差的綜合補償。
本文將綜合考慮3PSS/S(P為移動副,S為球面副)并聯(lián)機構(gòu)運動副間隙、桿件柔性等誤差,利用矢量法建立誤差模型,采用模糊神經(jīng)網(wǎng)絡(luò)對考慮綜合誤差并聯(lián)機構(gòu)進行誤差預估,并基于粒子群算法開展誤差補償分析。
1 3PSS/S并聯(lián)機構(gòu)綜合誤差預估模型
1.1 運動學誤差建模

圖1 3PSS/S并聯(lián)機構(gòu)支鏈及中心支鏈矢量圖
Fig.1 Branches and center branch vectors of 3PSS/Sparallel mechanism
在固定坐標系,PSS支鏈矢量關(guān)系為
(1)
式中,R為旋轉(zhuǎn)矩陣。
對式(1)進行偏微分,整理后得

(2)
由于機構(gòu)誤差主要由姿態(tài)變化引起,故以繞X、Y、Z軸轉(zhuǎn)動角度α、β、γ為輸入?yún)?shù),以3個轉(zhuǎn)動自由度方向誤差為輸出,每個輸入?yún)?shù)的模糊論域均用5個模糊子集覆蓋,共確定125條模糊控制規(guī)則,運用MATLAB編寫模糊神經(jīng)網(wǎng)絡(luò)模型程序。在此測試序號任取一組數(shù)據(jù),不妨取輸入序號15~25,機構(gòu)輸入值為表1所示。
為了覆蓋決策系統(tǒng)(U,B∪D)中所有置信度不小于θ且覆蓋值不低于η的覆蓋粒規(guī)則集合,其中θ和η均是預先設(shè)置的參數(shù)。文獻[19]建議θ的取值一般大于0.5,而η的取值依賴于數(shù)據(jù)集的具體信息。想要規(guī)則的覆蓋能力強,η的取值應該大一些,但過大的η閾值可能會使得RSθ,η(B,D)中丟失一些高置信度的規(guī)則,造成決策信息的損失;而較小的η閾值會使得RSθ,η(B,D)中的一些高置信度規(guī)則所蘊含的知識不具有一般性,導致其泛化能力較差。在實際問題中應該根據(jù)實際情況確定合適的η閾值。
KX=δΛ+MδL+N1δB′+N2δA+N2δC,
(3)

中心支鏈矢量微分方程為
泡椒豬皮是近年來新開發(fā)的休閑食品,現(xiàn)已成為我國川渝地區(qū)的特色美食。其充分利用了豬皮的營養(yǎng)價值和美容抗衰老功效,口感鮮香酸辣,深受消費者歡迎。但是由于其生產(chǎn)過程中需進行發(fā)酵處理,因而容易受到微生物污染,造成產(chǎn)品合格率下降。所以,生產(chǎn)出一種安全性高且保質(zhì)期較長的泡椒豬皮產(chǎn)品已為人們所需要。因此,可通過在泡椒豬皮中添加Nisin來達到抑菌及延長食品保質(zhì)期的效果。
δm0l0=δP-δl0m-δRS′-RδS′,
(4)
市場主體認可度和接受度顯著提高。截至6月末,云南跨境人民幣結(jié)算業(yè)務已從試點初期的邊境貿(mào)易拓展到全部經(jīng)常項目和資本項目投融資領(lǐng)域,結(jié)算主體從企業(yè)延伸至普通個人。跨境人民幣業(yè)務已覆蓋全省16個州市和23個省級以上口岸,提供結(jié)算服務的銀行25家,參與結(jié)算企業(yè)近3000家,較好滿足實體經(jīng)濟跨境結(jié)算需要。鼓勵云南省邊境地區(qū)金融機構(gòu)與周邊國家金融機構(gòu)加強聯(lián)系,共同促進區(qū)域性跨境金融合作與交流。文山州與越南河江省將金融合作納入雙邊合作規(guī)劃,德宏州瑞麗與緬甸木姐建立了“中國瑞麗—緬甸木姐”雙邊商業(yè)銀行定期會晤機制,版納州與緬甸開展聯(lián)合反假貨幣合作與跨境警務協(xié)作,確保人民幣在毗鄰國家地區(qū)的正常使用。
GδX=δl0+N3δS′,
(5)
其中,
G=mT(m×S)T,N3=mTR。
1.2 基于神經(jīng)網(wǎng)絡(luò)的模糊推理系統(tǒng)建模
通過改變驅(qū)動參數(shù),對3PSS/S并聯(lián)機構(gòu)動平臺誤差參數(shù)進行補償。基于粒子群算法構(gòu)建的目標函數(shù)為
圖2 3PSS/S并聯(lián)機構(gòu)綜合誤差模型
Fig.2 Integrated error model of 3PSS/S parallel mechanism
誤差預估模糊推理系統(tǒng)的神經(jīng)網(wǎng)格結(jié)構(gòu)如圖3所示,將神經(jīng)網(wǎng)絡(luò)的自適應能力應用于模糊推理系統(tǒng)中,構(gòu)建多輸入、多輸出的模糊推理系統(tǒng),以自動調(diào)節(jié)模糊系統(tǒng)中各個參數(shù),實現(xiàn)模糊規(guī)則的歸納、自學習和自適應功能。共有n+1個神經(jīng)網(wǎng)絡(luò),分別用NN1~NNn表示n條規(guī)則的結(jié)論部分中的函數(shù)f(x),而NNmf則是給出每條規(guī)則對于輸入X的適用度,模糊神經(jīng)系統(tǒng)的輸出為
(6)
圖3 神經(jīng)網(wǎng)絡(luò)的模糊推理系統(tǒng)
Fig.3 Neural network fuzzy inference system
設(shè)定輸入量X=[x1,x2,…,xl]T為3PSS/S并聯(lián)機構(gòu)姿態(tài)、速度和負載輸入矢量。U1為網(wǎng)格的輸出矢量,即為3PSS/S并聯(lián)機構(gòu)的姿態(tài)誤差預估值。
2 誤差綜合補償研究及仿真分析
2.1 機構(gòu)誤差仿真分析
2.堅持德藝相守以成大作。在文藝界,德藝雙馨被奉為圭臬。但對極大部分人而言,往往有些高不可及。而德藝雙守,可作為普遍追求和踐行的一個目標。相守的契合點在于,德是藝的靈魂,決定著藝的發(fā)展方向;藝為德提供支撐,是德發(fā)揮作用的基礎(chǔ)。進一步說,有德而少藝,對受眾就形不成藝術(shù)感召力、影響力,德就難以彰顯;有藝而缺德,在群眾中沒有良好的形象和口碑,藝術(shù)就會顯得脫節(jié),為人所疑。因此,一時做不到“雙馨”,但可追求“相守”,相互守望,德藝并肩,用作品說話,用人品說話,孜孜以求新作力作和大作,不懈追求新作為新影響新品牌,做精神富有者,并成為“精神富有”的貢獻者。
設(shè)定機構(gòu)運動軌跡,繞X、Y、Z軸轉(zhuǎn)動分別為:α=25d·sin(0.4πt)、β=20d·sin(0.4πt)、γ=30d·sin(0.4πt),設(shè)置仿真時間為5 s,步長為0.1 s,可得機構(gòu)動平臺繞X、Y、Z軸誤差曲線如圖5所示。
將ADAMS軟件分析得到的誤差數(shù)據(jù)導入MATLAB中,計算可得3PSS/S并聯(lián)機構(gòu)動平臺3個角度方向誤差如圖6所示。
圖4 含誤差源的3PSS/S并聯(lián)機構(gòu)虛擬樣機模型
Fig.4 Virtual prototype model of 3PSS/S parallelmechanism with error source
圖5 3PSS/S并聯(lián)機構(gòu)動平臺3個自由度方向角度誤差
Fig.5 Angle error in three degrees of freedom of 3PSS/S parallel mechanism moving platform
圖6 3PSS/S并聯(lián)機構(gòu)動平臺3個自由度方向角度誤差
Fig.6 Angle error in three degrees of freedom of 3PSS/S parallelmechanism moving platform by MATLAB software
基于前述理論分析,利用ADAMS軟件建立3PSS/S并聯(lián)機構(gòu)虛擬樣機模型如圖4所示,考慮桿長誤差及運動副間隙,對桿件進行柔性化處理,在球副加入0~0.01 mm的間隙,設(shè)置成實體與實體類型接觸載荷。
表1 3PSS/S并聯(lián)機構(gòu)輸入姿態(tài)角
Tab.1 Input attitude angle of 3PSS/S parallel mechanism (°)

輸入序號αβγ1524.557219.645729.46861623.776419.021128.53171722.620718.096527.14481821.108216.886625.32981919.262815.410323.11542017.113713.690920.53642114.694611.755717.63362212.04389.631514.4526239.20317.362511.0437246.21724.97387.4607253.13332.50673.7600
在機構(gòu)誤差分析的基礎(chǔ)上,將綜合誤差轉(zhuǎn)化為驅(qū)動位移誤差,機構(gòu)驅(qū)動位姿誤差與動平臺轉(zhuǎn)動誤差有如下映射關(guān)系:
素養(yǎng)考查分析:該題考查了頻數(shù)分布表與頻率分布直方圖之間的對應關(guān)系、平均數(shù)、概率等知識,以及紙筆作圖能力、數(shù)據(jù)分析能力.做好這題,要求學生能夠根據(jù)題目中提供的頻數(shù)分布表進行數(shù)據(jù)分析與數(shù)學計算.如第三問中,為了求出一年能節(jié)省多少水,可先求該家庭使用節(jié)水龍頭前后50天日用水量的平均數(shù):
3PSS/S并聯(lián)機構(gòu)動平臺繞X、Y、Z軸轉(zhuǎn)動角度預測值與仿真值的差值對比如表2所示。由表可以看出,綜合誤差預估模型預估差值率較低,表明預測精度相對較高。
圖7 3PSS/S并聯(lián)機構(gòu)動平臺3個自由度方向誤差預測值與仿真值對比
Fig.7 Comparison of prediction value and simulation value ofthree direction errors of 3PSS/S parallel mechanism
表2 3PSS/S并聯(lián)機構(gòu)動平臺轉(zhuǎn)動角度預估及仿真誤差值對比
Tab.2 Comparison of prediction and simulation error valuesof rotation angle of 3PSS/S parallel mechanism

仿真均值預估均值均差值差值率繞X軸轉(zhuǎn)動0.0232°0.0227°0.0005°2.15%繞Y軸轉(zhuǎn)動0.0082°0.0085°0.0003°3.65%繞Z軸轉(zhuǎn)動-0.0027°-0.0029°0.0002°7.40%
2.2 基于粒子群算法綜合誤差補償
并聯(lián)機構(gòu)的結(jié)構(gòu)誤差與驅(qū)動位移誤差之間呈現(xiàn)多參數(shù)、強耦合關(guān)系,難以獲得驅(qū)動誤差補償參數(shù)唯一解。因此采用粒子群算法,以機構(gòu)動平臺綜合誤差轉(zhuǎn)動角度最小為目標函數(shù),通過尋優(yōu)驅(qū)動移動副位移參數(shù)補償3PSS/S并聯(lián)機構(gòu)姿態(tài)誤差。
將表1各值代入誤差預估模型中,計算相應序號模型誤差預測值,將其與第二組仿真檢測誤差值對比,繞X、Y、Z軸轉(zhuǎn)動的仿真誤差與預估誤差對比如圖7所示。
上式兩側(cè)同乘mT,整理后可得
(7)
圖2為3PSS/S并聯(lián)機構(gòu)綜合誤差模型。
(4)相關(guān)電子元器件及電子材料:電源及穩(wěn)壓氣、電池、插座、電子元器件、組件、電子元器件、電線、電纜等。
(8)
在誤差預估數(shù)據(jù)的基礎(chǔ)上,對機構(gòu)進行誤差綜合補償,在機構(gòu)驅(qū)動移動副處利用粒子群優(yōu)化算法補償機構(gòu)驅(qū)動。
基于粒子群算法的3PSS/S機構(gòu)平臺轉(zhuǎn)動角度誤差補償過程如圖8所示,首先根據(jù)設(shè)定運動軌跡,采用反解算法求得各驅(qū)動滑塊的運動軌跡,通過綜合誤差預估模型,求得機構(gòu)綜合誤差值,基于粒子群優(yōu)化算法求得驅(qū)動位移補償值,重新進行軌跡規(guī)劃,實現(xiàn)減少并聯(lián)機構(gòu)的綜合誤差和修正期望軌跡的目的。
采用粒子群算法對修正后驅(qū)動位移進行仿真,結(jié)果如圖9所示,其中S1、S2、S3表示各個驅(qū)動分支的驅(qū)動位移曲線。
經(jīng)驅(qū)動位移補償后,輸入修正后的驅(qū)動位移曲線,進行運動軌跡仿真,修正前后繞X、Y、Z軸的運動軌跡如圖10所示。
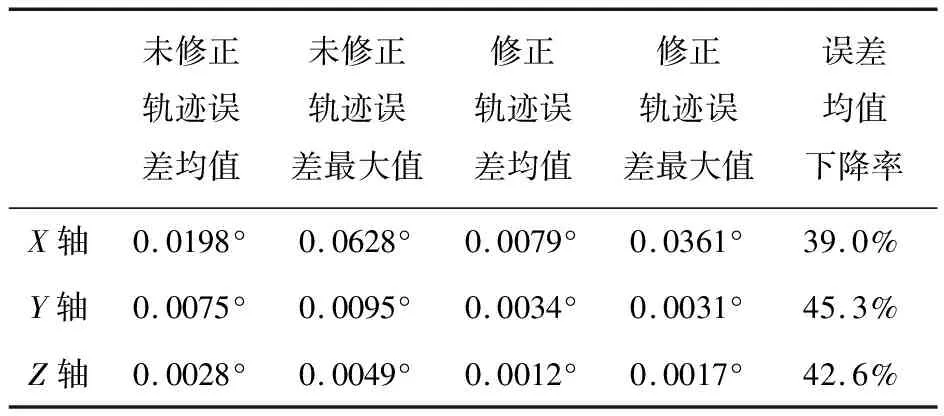
分析上述仿真數(shù)據(jù),進行修正前后軌跡誤差值對比,如表3所示。可見,經(jīng)過粒子群算法修正后,3PSS/S并聯(lián)機構(gòu)動平臺繞X、Y、Z軸運動軌跡的誤差均值以及誤差最大值均有所減小,修正后軌跡誤差均值下降率達到40%左右,3PSS/S并聯(lián)機構(gòu)運動精度得到提升。
十分鐘后,我就穿著及膝的黑色短裙站在了服裝店的鏡子前。裙子正好合身,不太肥,也不會緊貼大腿,不像她挑的第一件,也就是被我拒絕的那件。我裸露的胳膊上起了雞皮疙瘩。她解下我的頭繩,我晃了下頭甩開發(fā)辮,波浪一樣的長發(fā)披到肩頭。
圖8 基于粒子群算法的3PSS/S機構(gòu)平臺轉(zhuǎn)動角度誤差補償
Fig.8 Rotation angle error compensation of 3PSS/S mechanismplatform based on particle swarm optimization
圖9 驅(qū)動位移曲線
Fig.9 Drive displacement curve
表3 修正前后軌跡誤差值對比
Tab.3 Comparison of trajectory error value beforeand after correction
未修正軌跡誤差均值未修正軌跡誤差最大值修正軌跡誤差均值修正軌跡誤差最大值誤差均值下降率X軸0.0198°0.0628°0.0079°0.0361°39.0%Y軸0.0075°0.0095°0.0034°0.0031°45.3%Z軸0.0028°0.0049°0.0012°0.0017°42.6%
圖10 修正前后繞3個軸轉(zhuǎn)動姿態(tài)角對比
Fig.10 Comparison of the rotation angle of thethree axes before and after correction
3 結(jié)論
1)采用閉環(huán)矢量法構(gòu)建3PSS/S并聯(lián)機構(gòu)位姿誤差模型,推導了其映射矩陣。考慮運動副間隙和桿件柔性對3PSS/S并聯(lián)機構(gòu)進行軌跡仿真,采用模糊神經(jīng)網(wǎng)絡(luò)綜合誤差預估模型進行誤差預估。對比發(fā)現(xiàn)綜合誤差預估模型預估差值率較低,預估精度較高。
2)在誤差預測基礎(chǔ)上,結(jié)合運動誤差模型,建立驅(qū)動位移補償量與機構(gòu)動平臺姿態(tài)誤差矩陣映射。基于粒子群算法對驅(qū)動位移補償量進行優(yōu)化,并將補償后的驅(qū)動位移進行仿真,補償后機構(gòu)運動精度有所提升,動平臺誤差得到有效補償。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
