基于Arduino的移動(dòng)機(jī)器人實(shí)訓(xùn)平臺(tái)設(shè)計(jì)
2020-03-09 12:22:40胡天林李繼芳羅錦才謝路生陳志偉
實(shí)驗(yàn)技術(shù)與管理 2020年12期
胡天林,李繼芳,羅錦才,謝路生,陳志偉
(廈門大學(xué) 航空航天學(xué)院,福建 廈門 361005)
廈門大學(xué)自2004 年秋季開始推行第三學(xué)期制,鼓勵(lì)理工科專業(yè)在五周的集中時(shí)段內(nèi),開展通識(shí)類實(shí)踐課程。移動(dòng)機(jī)器人實(shí)訓(xùn)課程為其中內(nèi)容之一,定位是讓學(xué)生系統(tǒng)地了解移動(dòng)機(jī)器人的基礎(chǔ)知識(shí)。對(duì)應(yīng)的實(shí)訓(xùn)平臺(tái)涉及電源、傳感器、電機(jī)驅(qū)動(dòng)、編程語(yǔ)言、控制算法等方面,開放性好,具有豐富的軟硬件接口。學(xué)生可以通過工程儀表進(jìn)行電信號(hào)的測(cè)量,驗(yàn)證控制效果,從而實(shí)現(xiàn)知行合一。平臺(tái)強(qiáng)調(diào)“系統(tǒng)”意識(shí),刻意降低了編程語(yǔ)言可能導(dǎo)致的門檻[1]。采用開源的Arduino 作為控制平臺(tái)[2],學(xué)生可以在各種開源社區(qū)分享與交流創(chuàng)意。
1 功能模塊的設(shè)計(jì)
移動(dòng)機(jī)器人實(shí)訓(xùn)平臺(tái)的系統(tǒng)構(gòu)成如圖1 所示。主控系統(tǒng)是Arduino UNO,芯片采用Mega328P,其數(shù)字I/O 有0—13 等14 路通道,模擬I/O 有A0—A5等 6 路通道。傳感器包括編碼器、紅外光電、超聲波、攝像頭、慣性傳感器MPU6050 等。人機(jī)交互通過按鍵、OLED 顯示屏等實(shí)現(xiàn)。由于Arduino UNO的管腳資源有限,在方案設(shè)計(jì)時(shí)將按鍵與電阻串聯(lián),再將多個(gè)按鍵電阻組合進(jìn)行并聯(lián),由模擬I/O 獲得各按鍵所對(duì)應(yīng)的模擬值,從而有效地?cái)U(kuò)展了鍵盤。舵機(jī)使機(jī)器人轉(zhuǎn)向,可以直接通過脈寬調(diào)制(PWM)信號(hào)控制。電機(jī)驅(qū)動(dòng)器采用全橋集成電路A4950,其工作電壓可達(dá)40 V,峰值電流范圍是–3.5~3.5 A。電機(jī)采用直流有刷電機(jī),額定電壓12 V、額定功率15 W、額定轉(zhuǎn)矩2.6 kg·cm,帶減速箱的空載轉(zhuǎn)速是330 r/min。系統(tǒng)配置了電源管理系統(tǒng),為各模塊提供穩(wěn)定的電源,并具有低壓、過流報(bào)警功能。在機(jī)械結(jié)構(gòu)上,機(jī)器人底盤采用4 輪結(jié)構(gòu),包括后端2 個(gè)動(dòng)力輪和前端2 個(gè)可操縱輪[3],可操縱輪由舵機(jī)控制實(shí)現(xiàn)轉(zhuǎn)向。

圖1 實(shí)訓(xùn)平臺(tái)系統(tǒng)框圖
2 電源
系統(tǒng)由18650 型鋰離子電池供電。每節(jié)電池的標(biāo)稱電壓值是3.7 V,將3 節(jié)電池串聯(lián),總電壓范圍為10.5~12 V,串聯(lián)后的電壓可直接提供給電機(jī)驅(qū)動(dòng)器。電池的電壓會(huì)因負(fù)載的變化而波動(dòng),也會(huì)隨著使用而降低。但控制芯片等的電源要求穩(wěn)定可靠,因此要進(jìn)行直流-直流(DC-DC)轉(zhuǎn)換。在圖 2 中,通過LM2596-ADJ 實(shí)現(xiàn)電池電壓到6 V 的DC-DC 轉(zhuǎn)換[4-7]。LM2596-ADJ 是開關(guān)式電壓調(diào)節(jié)器。當(dāng)LM2596-ADJ(以下稱U2)的內(nèi)部開關(guān)管導(dǎo)通時(shí),工作電壓(圖2中的BAT_12V)由腳1 通過導(dǎo)通的開關(guān)管,從腳2 給電感H2 與電容C8 充電,也給負(fù)載供電。此時(shí),H2 和C8儲(chǔ)能,D2 截止。當(dāng)U2 內(nèi)部開關(guān)管截止時(shí),腳2 不再輸出,但電感的磁場(chǎng)能會(huì)轉(zhuǎn)換成電能,H2 維持負(fù)載的電流,再經(jīng)過D2 形成回路,此時(shí)D2 是導(dǎo)通的;在 H2 放電有電流回路的同時(shí),C8 也在放電。負(fù)載和電容的電位將略下降,經(jīng)過R10 和R11 的分壓后,經(jīng)U2 的腳4 反饋,與基準(zhǔn)電壓比較。當(dāng)?shù)陀诨鶞?zhǔn)電壓時(shí),U2 內(nèi)部開關(guān)管再次導(dǎo)通,開始下一個(gè)循環(huán)。在電路中設(shè)計(jì)有T3 測(cè)試點(diǎn),供調(diào)試觀測(cè)用。

圖2 DC-DC 6 V 電路原理
根據(jù)LM2596-ADJ 的手冊(cè),圖2 中的Vout與R10、R11的關(guān)系如式(1)所示。VREF為1.23 V。因此只要調(diào)節(jié)電位器R10,便可以得到6 V 的工作電源。
3 電機(jī)驅(qū)動(dòng)
小型移動(dòng)機(jī)器人多采用直流有刷電機(jī)或無刷電機(jī)。有刷電機(jī)的磁極不動(dòng)、線圈旋轉(zhuǎn)。有刷電機(jī)要持續(xù)轉(zhuǎn)動(dòng),需要線圈電流及時(shí)換相,而這是由跟隨電機(jī)轉(zhuǎn)動(dòng)的換相器與電刷的接觸切換來完成的。
電動(dòng)機(jī)轉(zhuǎn)速n的表達(dá)式[8]為

式中:n為轉(zhuǎn)速,單位為r/min;U為電樞端電壓,單位為V;I為電樞電流,單位為A;R為電樞電路總電阻,單位為Ω;Φ 為每極磁通量,單位為Wb;K為電動(dòng)機(jī)結(jié)構(gòu)參數(shù)。
根據(jù)式(2),改變U將改變電機(jī)的轉(zhuǎn)速。本教學(xué)平臺(tái)將基于此模型進(jìn)行電機(jī)的調(diào)速控制。
3.1 PWM 控制
PWM 指的是微處理器通過對(duì)脈沖寬度的控制,實(shí)現(xiàn)模擬量的輸出。圖3(a)是PWM 控制的單管電路模型,Us是電源電壓,UM是加載到電機(jī)上的等效電壓,Ui是控制信號(hào)。圖3(b)示意了Ui和UM的控制原理。t1和t2分別為控制信號(hào)高電平和低電平的時(shí)間,T是周期。圖3 是半橋電路,僅用于表述控制原理。實(shí)際的驅(qū)動(dòng)器A4950 是全橋電路。

圖3 PWM 控制原理圖
式(3)中,α是占空比,體現(xiàn)了高電平時(shí)間占整個(gè)周期的時(shí)間比例。可以推導(dǎo)出UM的表達(dá)式如式(4)所示。可以看出,當(dāng)控制信號(hào)的周期確定時(shí),調(diào)節(jié)占空比α即可改變控制電壓,從而實(shí)現(xiàn)調(diào)速。

3.2 A4950 驅(qū)動(dòng)器
一般來說,控制器的I/O 管腳僅產(chǎn)生控制信號(hào),驅(qū)動(dòng)功率有限,不足以直接驅(qū)動(dòng)電機(jī),因此常通過功率管或集成電路來驅(qū)動(dòng)電機(jī)。本文選用全橋電路A4950[9]。A4950 的LSS 端可以選擇接電源地,也可以接大功率的小電阻,通過電流采樣可以實(shí)現(xiàn)功率監(jiān)測(cè),也可以進(jìn)一步做電流環(huán)控制。表1 是A4950 的控制邏輯真值表。其中,H 表示高電平;L 表示低電平;Z 表示高阻抗。IN1 和IN2 是A4950 的輸入;OUT1和OUT2 是A4950 的輸出,加載在電機(jī)的電源工作端。控制器產(chǎn)生的脈寬調(diào)制信號(hào)加載至IN1 和IN2 等2 個(gè)管腳,即可實(shí)現(xiàn)電機(jī)的方向和速度控制。
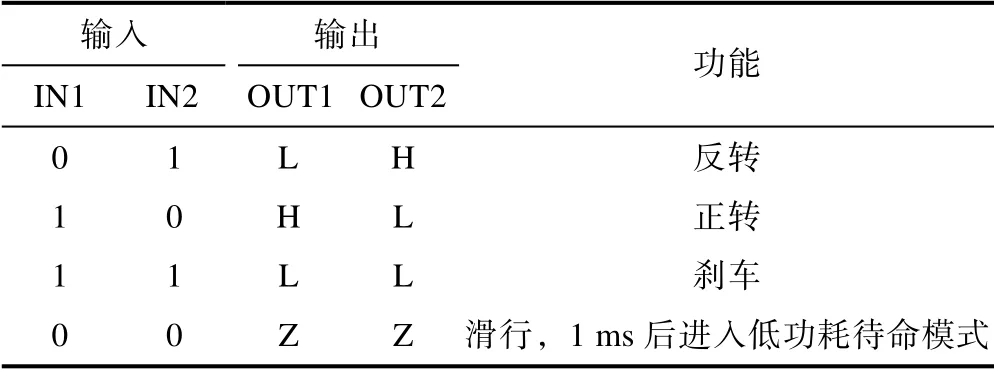
表1 A4950 控制邏輯真值表
在進(jìn)行印制電路板(PCB)設(shè)計(jì)時(shí),可以在A4950芯片的下方覆銅,并設(shè)置過孔以加快散熱。
4 速度環(huán)的控制與實(shí)現(xiàn)
實(shí)際的電機(jī)工作過程遠(yuǎn)比節(jié)3 要復(fù)雜。如果要準(zhǔn)確控速,就要實(shí)時(shí)采樣電機(jī)的轉(zhuǎn)速,與期望速度對(duì)比,通過閉環(huán)控制實(shí)時(shí)改變占空比。
4.1 編碼器
調(diào)速首先要測(cè)速,大多使用編碼器。編碼器是一種將角位移或者角速度轉(zhuǎn)換成一連串?dāng)?shù)字脈沖電信號(hào)的旋轉(zhuǎn)式傳感器[10-12]。編碼器內(nèi)部有碼盤。在碼盤圓板上等分地開通若干個(gè)小孔,兩邊分別裝配有光源和光敏元件。碼盤隨工作軸旋轉(zhuǎn),光源發(fā)射的光或通過小孔或被擋住,光敏元件可檢測(cè)出對(duì)應(yīng)信號(hào),再經(jīng)過整形放大,可以輸出脈沖信號(hào)。脈沖數(shù)反映了轉(zhuǎn)過的角度,脈沖的頻率表征了角速度。為了判斷轉(zhuǎn)向,一般會(huì)至少輸出兩組存在一定相位差的A 和B相信號(hào)。
4.2 Arduino 測(cè)速實(shí)現(xiàn)
圖4示意了增量式編碼器A、B相與正反轉(zhuǎn)的關(guān)系。在圖4(a)中,A 相滯后B 相,假設(shè)為正轉(zhuǎn);圖4(b)中,A 相超前B 相,假設(shè)為反轉(zhuǎn)。正轉(zhuǎn)與反轉(zhuǎn)是相對(duì)的。

圖4 A、B 相時(shí)序與正反轉(zhuǎn)的對(duì)應(yīng)關(guān)系
根據(jù)圖4 的時(shí)序圖,可以得到表2 的脈沖計(jì)數(shù)方式。
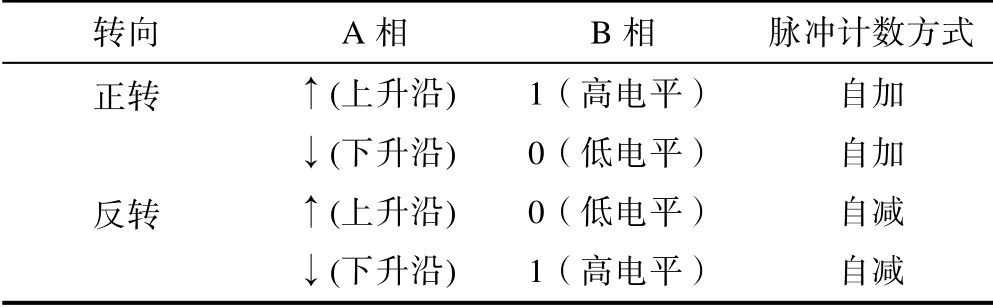
表2 A、B 相的信號(hào)與脈沖計(jì)數(shù)方式
Arduino 可通過函數(shù)attachPinChangeInterrupt(pin,Function,Mode) 實(shí)現(xiàn)計(jì)數(shù)。其中pin 指的是管腳編號(hào);Function 是中斷函數(shù)的名稱;Mode 是中斷觸發(fā)模式,共有LOW(低電平觸發(fā))、CHANGE(電平變化即觸發(fā))、RISING(上升沿觸發(fā))、FALLING(下降沿觸發(fā))4 種方式。例如,attachPinChangeInterrupt(L_M_Encoder,Read_L_M_Encoder(),CHANGE),表示當(dāng)管腳L_M_ Encoder 的電平發(fā)生變化(上升沿或者下降沿)時(shí),調(diào)用Read_L_M_Encoder()函數(shù)。在Read_L_M_Encoder()的函數(shù)中,應(yīng)根據(jù)表2,進(jìn)一步判斷B 相的電平狀態(tài),由此決定脈沖計(jì)數(shù)的方式。脈沖計(jì)數(shù)值的符號(hào)反映了正反轉(zhuǎn)。
4.3 PID 閉環(huán)控制
式(5)是數(shù)字型位置式PID 算法。該算法在具體實(shí)現(xiàn)時(shí)需累加 ()e j,會(huì)占用較多的存儲(chǔ)單元,且不便于編寫程序。

將式(5)減去式(6),得到增量式PID 算式(7)。可以看出,該算法具有遞推使用、編程簡(jiǎn)單、占用存儲(chǔ)少、計(jì)算快等優(yōu)點(diǎn)[13]。
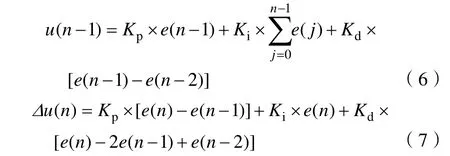
比較式(7)和(5),可以發(fā)現(xiàn),增量式算法(式(7))中Kp的作用變成了微分,類似位置式算法(式(5))的Kd;增量式算法(式(7))中的Ki的作用是比例,類似位置式算法(式(5))的Kp。后面的分析中要注意。
根據(jù)式(7),可以建立關(guān)于PWM 占空比給定值的增量式公式。擬用PD 控制,代碼實(shí)現(xiàn)如圖5 所示。其中,Pwm_Value 是經(jīng)PD 計(jì)算后的關(guān)于PWM 占空比的給定值;Error 和Last_Error 分別是關(guān)于速度的設(shè)定值與實(shí)際值的本次偏差和上次偏差;Speed_Kp 與Speed_Ki 是PID 算子。在程序的末尾,對(duì)PWM 占空比設(shè)定值作了限幅。通過定時(shí)器MsTimer2,以5 ms為周期,進(jìn)行速度的采樣和PID 算法控制。為了評(píng)價(jià)控制效果,在下位機(jī)中,通過Serial.print()函數(shù)發(fā)送采樣的速度實(shí)際值。通過MATLAB 對(duì)數(shù)據(jù)做均值濾波處理,控制效果如圖6 所示。
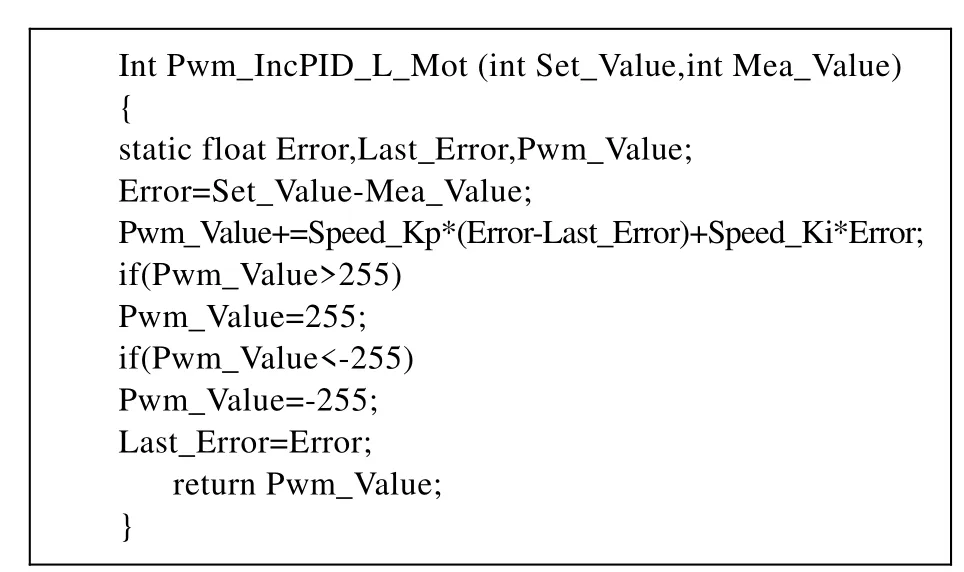
圖5 PWM 占空比給定值增量公式的代碼實(shí)現(xiàn)
由圖6 中可以看出,當(dāng)Kp=0 和Ki=3.0 時(shí),響應(yīng)一直在震蕩;加入微分抑制即將Kp調(diào)整為4.5,在2到3 個(gè)波后,響應(yīng)基本穩(wěn)定在可接受的靜差內(nèi),穩(wěn)態(tài)誤差控制在5%內(nèi)。

圖6 觀測(cè)PID 控制效果
5 舵機(jī)的控制與實(shí)現(xiàn)
舵機(jī)由減速器、輸出軸、電機(jī)、電位器、控制器、驅(qū)動(dòng)器等組成。電機(jī)與減速器通過齒輪連接,輸出軸連接減速器與舵面負(fù)載。控制器通過安裝在輸出軸上的電位器反饋舵機(jī)的位置信號(hào),形成舵機(jī)系統(tǒng)閉環(huán)。舵機(jī)是一種角度的位置伺服機(jī)構(gòu)[14]。舵機(jī)的輸入信號(hào)一般是周期固定為20 ms 的PWM 信號(hào),高電平時(shí)間為0.5~2.5 ms,即占空比為2.5%~12.5%,基本上線性對(duì)應(yīng)了從0~180°的旋轉(zhuǎn)角度范圍。Arduino 提供了舵機(jī)系統(tǒng)函數(shù)attach(int pin,int min,int max)和write(int value)。前者函數(shù)主要用于設(shè)定控制舵機(jī)的信號(hào)管腳。參數(shù)pin 傳遞引腳編號(hào),對(duì)于Arduino UNO,只能選擇9 或者10 號(hào)管腳;參數(shù)min 傳遞最小脈沖寬度;參數(shù)max 傳遞最大脈沖寬度。參數(shù)min 和max起限幅作用。該函數(shù)返回值是引腳編號(hào),如果失敗則返回0。后者函數(shù)用于設(shè)置舵機(jī)的旋轉(zhuǎn)角度。圖7 是示波器對(duì)控制信號(hào)的測(cè)試波形,可以看出對(duì)應(yīng)90°時(shí),實(shí)測(cè)脈寬為1.50 ms,信號(hào)頻率是50 Hz。在實(shí)際使用中,由于舵機(jī)電位器的線性度可能不好或者比例電路有誤差,需要根據(jù)實(shí)際情況進(jìn)行控制脈寬的調(diào)整。

圖7 示波器對(duì)控制信號(hào)的測(cè)試波形
6 結(jié)語(yǔ)
本文設(shè)計(jì)了一種于Arduino 的移動(dòng)機(jī)器人實(shí)訓(xùn)平臺(tái),包括電源、驅(qū)動(dòng)、傳感器、編程語(yǔ)言、算法控制等各個(gè)基礎(chǔ)知識(shí)模塊。針對(duì)每一模塊都可以圍繞需求、方案、原理、實(shí)現(xiàn)、測(cè)試等開展教學(xué)。基于該平臺(tái),可設(shè)計(jì)24 學(xué)時(shí)的基礎(chǔ)課程和48 學(xué)時(shí)的進(jìn)階課程。教學(xué)課程內(nèi)容全面,通過豐富的軟硬件接口,可靈活增加各種傳感器或者執(zhí)行器;教學(xué)方式有趣,有效地調(diào)動(dòng)了學(xué)生的學(xué)習(xí)熱情。
猜你喜歡
北京航空航天大學(xué)學(xué)報(bào)(2022年6期)2022-07-02 01:59:12
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2020年12期)2020-05-22 09:25:38
電子制作(2018年11期)2018-08-04 03:25:42
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
電子制作(2017年8期)2017-06-05 09:36:15
信息記錄材料(2016年4期)2016-03-11 15:22:54
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)海洋大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31
 實(shí)驗(yàn)技術(shù)與管理2020年12期
實(shí)驗(yàn)技術(shù)與管理2020年12期
- 實(shí)驗(yàn)技術(shù)與管理的其它文章
- 基于150起實(shí)驗(yàn)室事故的統(tǒng)計(jì)分析及安全管理對(duì)策研究
- 高校實(shí)驗(yàn)室危險(xiǎn)化學(xué)品“互聯(lián)網(wǎng)+電子追蹤+法治”規(guī)范管理新模式探索與實(shí)踐
- 基于PDCA循環(huán)的醫(yī)科院校實(shí)驗(yàn)室安全教育課程體系構(gòu)建與實(shí)踐研究
- 交叉學(xué)科實(shí)驗(yàn)室開放與安全的管理體系建設(shè)
- 基于PDCA循環(huán)的大型儀器實(shí)驗(yàn)室安全管理體系建設(shè)與實(shí)踐
- 高校實(shí)驗(yàn)室安全教育培訓(xùn)的實(shí)踐與保障策略研究