傳感器感知盲區條件下智能汽車主動制動系統控制研究
2020-03-09 07:36:00袁朝春何友國SHENJie翁爍豐
農業機械學報 2020年2期
袁朝春 王 桐 何友國 SHEN Jie 陳 龍 翁爍豐
(1.江蘇大學汽車工程研究院, 鎮江 212013; 2.密歇根大學迪爾本校區, 迪爾本MI 48128)
0 引言
無人駕駛汽車的安全性一直是智能汽車領域研究人員高度關注的問題[1-3]。汽車主動避撞系統是無人駕駛汽車實現縱向安全的關鍵部件,其利用車載傳感器(雷達、攝像頭等)對行駛環境進行感知,在安全距離模型的基礎上對車輛行駛的安全風險進行判斷,并據此對車輛制動系統進行控制。行駛安全風險的準確判斷是提高無人駕駛車輛安全性的關鍵環節。眾多學者進行了研究,提出以安全距離模型為判斷追尾碰撞風險的算法,如基于車輛制動過程運動學分析的安全距離模型[4]和基于車間時距的安全距離模型[5-6]。通過這些模型,智能汽車可以準確判斷與可檢測交通參與者之間的安全狀態,以防止追尾碰撞[7]。但是,在彎道、交岔路口等道路環境下,由于高大樹木、建筑物等遮擋,使智能汽車在一定范圍內存在傳感器感知盲區。在感知盲區內,智能汽車不能及時發現可能存在的潛在交通事故風險,使該類潛在交通事故呈現出潛伏性和突發性等特點,現有安全距離模型對感知盲區內潛在交通事故進行規避存在一定的局限性。
目前,研究人員逐漸意識到感知盲區對智能汽車安全行駛的影響,美國、日本、韓國以及國內清華大學、同濟大學等嘗試利用車聯網[8-9]或ITS系統[10-11]解決這一問題,研究工作已取得很大進展。但是,由于成本及建設進度的影響,對智能汽車自動駕駛而言,傳感器感知盲區潛在交通事故風險具有不可直接觀測、動態變化及不確定的特點,基于車載傳感器的信息不能直接檢測盲區潛在交通事故風險,必須基于人工智能算法挖掘潛在交通事故的風險特征[12]。
本文基于車載傳感信息,以電子機械制動系統(EMB)為平臺,將傳感器感知盲區進行分類并建模,預測感知盲區內潛在障礙物的運動趨勢,建立傳感器感知盲區主動避撞安全距離模型,對感知盲區內由潛在障礙物造成的潛在交通事故風險進行預判,揭示傳感器感知盲區潛在交通事故風險演化及規避機理,防止傳感器感知盲區內因障礙物的突然出現造成安全距離不足而引起的碰撞事故。
1 制動系統建模
采用的EMB執行器包括永磁直流力矩電機、行星齒輪系統、滾珠絲杠等,按照結構特點可以將EMB執行器數學模型分為驅動電機模型、電機摩擦模型、傳動機構模型以及負載模型4部分。主動避撞制動系統通過對傳感器感知盲區的識別獲取外界環境信息,通過車載傳感器獲取整車信息,然后根據傳感器感知盲區安全距離模型判斷主動避撞制動系統的開啟與關閉,對電機進行實時控制,從而實現對無人駕駛汽車的動力控制。EMB執行器控制原理如圖1所示。

圖1 控制原理圖
1.1 電動機模型
EMB驅動電機為永磁直流力矩電機,假設不考慮電刷的機械換向對電機運行產生的影響,電機等效模型如圖2所示[13]。

圖2 電動機工作原理圖
電機工作時,各物理量存在如下關系
(1)
式中Ea——電樞電壓,VIa——電樞電流,A
Ra——電樞電阻,Ω
La——電樞電感,H
Eb——反電動勢,V
KE——反電動勢系數,V·min/r
θm——電動機轉角,rad
wm——電動機轉速,r/min
Jm——等效轉動慣量,kg·m2
Te——電動機電磁轉矩,N·m
TF——電動機摩擦轉矩,N·m
TL——負載轉矩,N·m
KT——電動機轉矩系數,N·m/A
1.2 電機摩擦模型
機電系統中的摩擦力會嚴重影響系統的控制性能,本文選用能夠可靠描述摩擦力負阻尼特性的Stribeck摩擦模型[14],數學表達式為

(2)
式中Tc——庫倫摩擦力矩,N·m
Ts——最大靜摩擦力矩,N·m
ω——電機角速度,rad/s
ωs——Stribeck角速度,rad/s
Bv——黏性摩擦因數
1.3 傳動機構模型
EMB傳動機構主要包括行星齒輪減速器和滾珠絲杠,行星齒輪架構模型為[15]
θ=θm/i
(3)
式中θ——行星齒輪機構輸出轉角,rad
i——行星齒輪機構減速比
滾珠絲杠數學模型為
(4)
式中Ph——滾珠絲杠機構導程,mm
x——滾珠絲杠螺母位移,mm
1.4 負載模型
根據EMB執行器實物試驗測量結果,通過曲線擬合得到多項式系數,制動夾緊力與滾珠絲杠螺母位移滿足關系
(5)
式中FN——制動夾緊力,N
制動夾緊力FN通過滾珠絲杠和行星齒輪減速器反向作用于驅動電機,產生驅動電機的負載轉矩TL,可得
(6)
ηs——滾珠絲杠機構機械效率
Tg——行星齒輪機構輸出轉矩,N·m
TL——電機負載轉矩,N·m
ηg——行星齒輪機構機械效率
EMB采用浮動鉗盤式制動器,假設制動盤兩側受到的摩擦均勻,則制動器制動力矩為
Tμ=2FNμpRb
(7)
式中Tμ——制動器制動力矩,N·m
μp——制動塊摩擦因數
Rb——制動盤有效摩擦半徑,mm
2 傳感器感知盲區
在無人駕駛汽車領域,現有主動安全技術都是基于環境感知傳感器可感知到的障礙物進行主動避撞算法的研究。但是,由于傳感器工作原理和外界環境的限制,在無人駕駛汽車實際行駛過程中,極易產生傳感器感知盲區,傳感器感知盲區內可能存在的障礙物對無人駕駛汽車的行駛安全造成巨大影響。
2.1 無人駕駛汽車環境感知傳感器
智能駕駛系統構成如圖3所示,主要分為環境感知、規劃決策、控制執行三部分。
其中,對道路環境的良好感知是智能汽車安全行駛的前提[16]。智能駕駛領域內的環境感知研究主要是識別道路環境信息,挖掘其中影響智能汽車行駛安全的信息,智能駕駛系統中的環境感知傳感器主要包括:車載攝像頭、毫米波雷達、激光雷達等。
在智能駕駛感知模塊中,攝像頭是必不可少的關鍵硬件,所用攝像頭主要有單目攝像頭和雙目攝像頭。車載攝像頭能夠識別智能汽車駕駛環境中的多種物體,隨著機器視覺的快速發展,圖像處理算法的速度和識別目標物體的準確度都得到了很大的提升。現有算法基于攝像頭可識別的障礙物進行主動避撞,本文則對攝像頭不可直接觀測的傳感器感知盲區內可能存在的隱藏障礙物進行危險程度預測和評估。
智能汽車所用毫米波雷達的主要任務是探測障礙物目標的相關信息,包括相對位置、相對速度等。毫米波雷達通過天線接收目標反射的毫米波信號,處理后獲取前方道路環境信息,對毫米波感知到的物體信息進行追蹤和分類。毫米波雷達的工作方式決定了該傳感器在復雜道路環境中會產生傳感器感知盲區。
激光雷達是一種發送激光束獲取探測目標位置、速度等特征量的主動探測技術。激光雷達能夠對整個行駛環境進行3D建模,能夠更加清晰地表明環境特征。若障礙物被樹木、建筑物等遮擋,激光雷達也不能將其準確識別。
綜上所述,在復雜道路環境下,若障礙物被高大樹木、建筑物等遮擋,環境感知傳感器不能準確識別傳感器感知盲區內可能存在的障礙物,存在安全隱患,影響智能汽車的安全行駛。

圖3 智能駕駛系統
2.2 傳感器感知盲區定義
在復雜道路環境下,由于高大樹木、建筑物的遮擋,環境感知傳感器不能準確感知到障礙物,智能汽車在一定范圍內會出現傳感器感知盲區,圖4為典型的傳感器感知盲區場景。

圖4 典型傳感器感知盲區
傳感器感知盲區是無人駕駛汽車交通事故頻發的主要原因之一,需要對傳感器感知盲區進行數據挖掘分析,尋找其運動變化特征,從而做出對應的主動避撞控制策略,提高車輛和行人的安全指數。
2.3 傳感器感知盲區識別和分類
卷積神經網絡(Convolutional neural networks, CNN)是一種前饋式神經網絡,常被用來研究二維圖像識別問題,且僅需少量的預處理,識別范圍廣,能容許圖像的畸變,已成功應用于手寫字符識別、人臉識別、人眼檢測、行人檢測、機器人導航[17-19]。在智能車領域中該網絡能夠對傳感器感知盲區進行識別并分類,具有較強的實時性和應用性。
鑒于在對傳感器感知盲區進行卷積神經網絡識別和分類時,需要大量具有特殊感知盲區特征的圖像作為樣本,本文在城市典型道路工況下拍攝具有感知盲區特征的圖像,預處理后建立感知盲區數據庫,并利用preprocessing函數擴展數據庫數量為56 000幅,如圖5、6所示。

圖5 傳感器感知盲區圖像

圖6 傳感器感知盲區數據庫
依據傳感器感知盲區的特征搭建用于識別并分類傳感器感知盲區的卷積神經網絡,整體網絡框架如圖7所示。
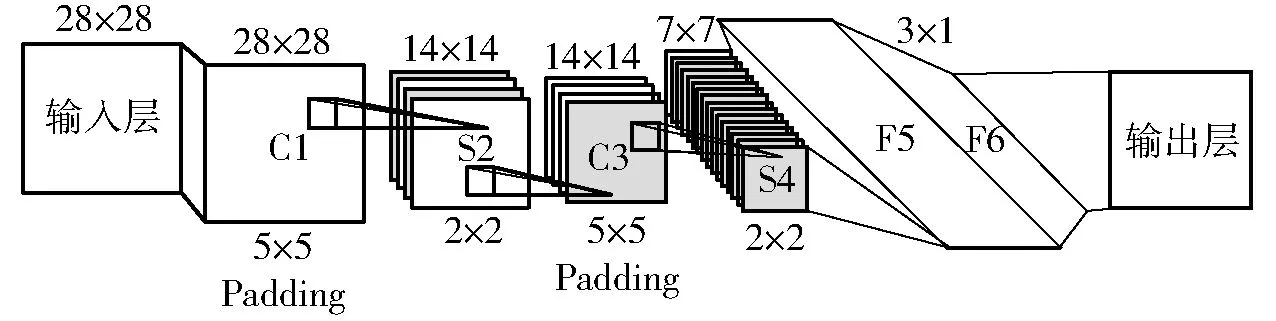
圖7 卷積神經網絡框架
傳感器感知盲區多存在于多岔路口、十字路口、彎道等道路環境,道路特征與路邊環境特征有明顯的分界線。為提取分界線特征,搭建包含1個輸入層、2個卷積層、2個池化層、2個全連接層和1個輸出層在內的7層卷積神經網絡。
在輸入層,將感知盲區圖像進行預處理并將其二值化,保存為數組,為降低算法運行時間,圖像尺寸設置為28像素×28像素。輸入時對數組進行讀取,并且利用train_test_split函數將數據分割為訓練集和測試集,70%為訓練集,30%為測試集。
在2層卷積層,根據輸入層圖像尺寸和特征情況,選擇合適的卷積核和卷積步長,并用padding函數使圖像尺寸保持不變。卷積核尺寸為2像素×2像素。卷積步長為1像素×1像素。
在2層池化層,根據RGB通道中白色數值為最大值255,選擇最大池化函數max_pool,選擇合適的池化核和池化步長。池化核大小為2像素×2像素,池化步長為1像素×1像素。
在全連接層,根據對傳感器感知盲區的特征分析,確認有3種類型的傳感器感知盲區,定為prediction={0,1,2}。
算法中偏置設置為0.1,權重初始設為從截斷的正態分布中輸出隨機值,在算法中的每一層進行迭代計算。
卷積神經網絡將數據庫的訓練數據循環訓練1 000次,并且對測試數據進行測試,利用compute_accuracy函數通過比對全連接層的輸出prediction和測試數據標簽計算識別成功率。
本文搭建的傳感器感知盲區卷積神經網絡因數據庫的復雜程度較高,在經過算法的優化后,識別成功率達84%,識別單幅圖像僅需0.2 s。
3 主動避撞算法
由于傳感器感知盲區內潛在障礙物具有不可直接觀測的特性,本文將傳感器感知盲區與可感知區域的邊界線作為敏感區域,采集具有傳感器感知盲區特征的圖像建立感知盲區數據庫,分析其運動特征對其進行分類并預測潛在障礙物的位置和運動狀態,建立傳感器感知盲區條件下的主動避撞安全距離模型,設計傳感器感知盲區條件下主動避撞算法。
3.1 傳感器感知盲區特征分析
根據感知盲區的運動變化趨勢分析無人駕駛汽車環境感知范圍的變化趨勢,并將傳感器感知盲區分為漸開式感知盲區、跟隨式感知盲區和綜合式感知盲區。
(1)漸開式感知盲區
漸開式感知盲區多存在于交岔路口道路環境中,圖8為漸開式感知盲區示意圖,圖9為漸開式感知盲區視野增益圖。由圖可知,智能汽車在行駛過程中感知區域的變化和遮擋物的具體位置密切相關,漸開式感知盲區中,遮擋物的位置固定不變,X1、X2分別為漸開式盲區左右兩側的固定遮擋物。智能汽車以車速v從位置1行駛到位置2時,在相同時間間隔下,分析感知盲區邊界線的運動距離,如圖中ΔS1、ΔS2、ΔS3所示。經分析,盲區邊界線的運動狀態近似為勻加速運動。

圖8 漸開式感知盲區示意圖

圖9 漸開式感知盲區感知區域增益
本文構建了符合實際情況的交岔路口道路環境,研究分析了盲區邊緣線的運動狀態。所建交岔路口為標準公路雙車道,智能汽車行駛在車道正中間。傳感器感知盲區邊緣線的運動狀態為

(8)

(9)
式中vobscured-g-r——右轉時漸開式感知盲區邊緣線的運動速度,m/s
vobscured-g-l——左轉時漸開式感知盲區邊緣線的運動速度,m/s
Sedge-g-r、Sedge-g-l——右轉或左轉時感知盲區邊緣線運動距離,m
S1——無人駕駛汽車與交岔路口的相對距離,m
kobscured——評價系數,表征傳感器感知盲區邊緣線運動速度遠大于車速
以右轉為例分析感知盲區邊界線運動速度。在無人駕駛汽車與交岔路口之間的相對距離較大時,即S1>30 m,感知盲區邊緣線基本保持不變,本文擬將其作為道路中的固定障礙物處理,即vobscured=0,感知盲區邊緣線與智能汽車的相對距離不斷縮短;在CAD中建立假設的道路環境,對其進行數據分析,當無人駕駛汽車與交叉路口相距1.7 m時,感知盲區邊界線的運動速度與智能汽車相等,如圖10所示。

圖10 感知盲區數據分析
當無人駕駛汽車與交岔路口的相對距離1.7 m≤S1≤30 m時,感知盲區邊緣線開始以加速的方式運動。本文擬將其作為正在進行勻加速運動的障礙物處理,感知盲區邊緣線運動狀態為
vobscured-g-r=v(30-S1)/(2Sedge-g-r)
(10)
vobscured-g-l=v(30-S1)/(2Sedge-g-l)
(11)
當智能汽車與交岔路口的相對距離0≤S1<1.7 m時,感知盲區邊緣線的速度將遠大于車速,感知盲區邊緣線與無人駕駛汽車的相對距離將逐漸增大。若感知盲區邊緣線與無人駕駛汽車的相對距離遠大于安全距離,則傳感器感知盲區將不會對智能汽車的正常行駛造成影響。
(2)跟隨式感知盲區
跟隨式感知盲區(圖11)多存在于彎道道路環境中,跟隨式感知盲區感知區域增益如圖12所示。由圖可知,智能汽車在行駛過程中感知區域的變化和遮擋物的位置并無太大的關聯,感知范圍基本保持不變,圖中Y1、Y2分別為不同時刻遮擋物的位置。

圖11 跟隨式感知盲區示意圖

圖12 跟隨式感知盲區感知區域增益
無人駕駛汽車以車速v從位置1行駛到位置2處,車輛環境感知區域在等間隔時間內基本沒有發生變化,即在此道路環境中,傳感器感知盲區的邊界線跟隨無人汽車行駛速度變化而變化,兩者速度基本保持一致,vobscured-f=v。
無人駕駛汽車在該類傳感器感知盲區行駛過程中,當前方感知盲區邊界線處突然出現障礙物,若無人駕駛汽車只采取現有安全距離模型,會因制動距離不夠而導致追尾碰撞事故;若智能汽車將前方感知盲區敏感區域作為疑似障礙物進行主動避撞控制,根據傳感器感知盲區邊緣線的運動變化控制車速,與傳感器感知盲區邊界線保持一定的安全距離,則能夠避免傳感器感知盲區內突然出現的障礙物對無人駕駛汽車的安全造成不可挽回的影響。
在無人駕駛汽車即將通過彎道時,感知盲區的范圍將會發生突變。此時,若傳感器未感知到前方存在障礙物,可以在一定的范圍內提高車速安全通過傳感器感知盲區,既保證了車輛的主動安全性能,又能適當提高道路通過率。
(3)綜合式感知盲區
綜合式感知盲區綜合上述兩類感知盲區的特點及變化趨勢,如圖13所示,左側為漸開式感知盲區,右側為跟隨式感知盲區。在智能汽車行駛過程中,應考慮這兩種盲區同時存在的情況,且應根據當時的車速情況、行駛目的信息(左轉或者右轉)判定綜合式中兩類感知盲區的優先級,在避免碰撞到其他障礙物的同時,也要避免成為其他交通參與者的障礙物。

圖13 綜合式感知盲區
若智能汽車需要左轉通過路口,由于右側為跟隨式感知盲區,右側的視野區域基本保持不變,在保持右側安全距離的同時,優先考慮左側漸開式感知盲區;若智能汽車右轉通過路口,此時,著重考慮右側跟隨式感知盲區。但是,這種情況下,無人駕駛汽車還需避免成為左側車道中的道路參與者行駛路線上的障礙物。參照上述標準控制智能汽車的速度,研究性能相對較好的傳感器感知盲區主動避撞算法,提高無人駕駛汽車的主動安全性能。
3.2 傳感器感知盲區安全距離模型
由于傳感器感知盲區的存在降低了無人駕駛汽車的行駛安全性,提出了一種改進的應用于彎道和交岔路口等潛在交通事故風險較大區域的傳感器感知盲區安全距離模型。該模型假設傳感器感知盲區內存在障礙物,以此將傳感器感知盲區邊緣線作為可移動障礙物進行主動避撞。由于不同類別的感知盲區邊界線有不同的運動狀態,且安全制動距離與邊界線的運動狀態有關,故本文引用基于前車狀態的安全距離模型[20],進一步對跟車的安全距離進行計算。傳感器感知盲區安全距離模型擬將盲區邊界線作為運動障礙物存在,會極大地縮減制動反應時間,提高智能汽車的主動安全性。
(1)漸開式盲區
由式(10)、(11)可知,當智能汽車與三岔路口的相對距離在1.7~30 m范圍內時,傳感器感知盲區邊界線的運動加速度為
aobscured-g-r=v2/(2Sedge-g-r)
(12)
aobscured-g-l=v2/(2Sedge-g-l)
(13)
式中aobscured-g-r、aobscured-g-l——右側或左側漸開式感知盲區邊緣線的運動加速度,m/s2
此時,無人駕駛汽車以車速v行駛,實際情況中盲區邊緣線運動狀況不完全符合勻加速運動,故盲區邊緣線加速度取較小值,漸開式感知盲區安全距離為

(14)
式中Ds-g——漸開式感知盲區安全距離,m
a——無人駕駛汽車的制動減速度,m/s2
τdetect——智能汽車感知環節時滯,s
d0——車輛停止后與前方潛在障礙物相對距離,取值2~5 m
(2)跟隨式盲區
在跟隨式感知盲區中,傳感器感知盲區邊界線以與自車近乎相同的速度向前運動。此時,若盲區邊界線處不存在障礙物,自車將不會發生碰撞。為了避免盲區邊界線處突然出現障礙物,不碰撞最小安全距離應為
Ds-f=vτdetect+v2/(2a)+d0
(15)
式中Ds-f——跟隨式感知盲區安全距離,m
(3) 引入附著系數
汽車在路面上的制動還受路面和輪胎之間的附著條件的影響,可以得出amax=gφ,φ為輪胎與路面間的附著系數。將其代入式(14)、(15)則有
(16)
Ds-f=vτdetect+v2/(2gφ)+d0
(17)
本文搭建了傳感器感知盲區主動避撞安全距離模型,將傳感器感知盲區邊緣線作為可移動障礙物實施主動避撞措施,使無人駕駛汽車在傳感器感知盲區內處于高度警惕狀態,提高了無人駕駛汽車的主動安全性能[21]。在無人駕駛過程中,在保證安全性能的前提下兼顧乘客的舒適性,參考路面峰值附著系數辨識算法[22]和典型路面的峰值附著系數和最佳滑移率的關系[23],結合本文設計的傳感器感知盲區主動避撞策略,在不同的路面附著系數下,保證乘客的舒適性。
4 主動避撞控制算法驗證
基于傳感器感知盲區的特征對無人駕駛汽車進行車速的主動控制,控制邏輯如圖14所示。
為了驗證本文所設計的傳感器感知盲區安全距離模型的性能,對比了有、無傳感器感知盲區安全距離模型的最小安全距離,并且對存在障礙物情況的傳感器感知盲區安全距離模型進行仿真。

圖14 傳感器感知盲區主動避撞控制邏輯
4.1 最小安全距離仿真
檢測環節時滯為0.2 s,路面附著系數取0.7,分別對漸開式感知盲區和跟隨式感知盲區兩種潛在交通事故區域進行了仿真分析。通過自車的速度變化分析4種模型的安全距離,仿真結果見圖15。

圖15 安全距離和車速的關系
仿真結果表明,在特定道路區域,傳感器感知盲區安全距離模型計算的最小安全距離小于2個典型安全距離模型。傳感器感知盲區安全距離模型將感知盲區邊緣線作為疑似障礙物,縮短了判斷是否需要制動的時間,提前對智能汽車進行車速控制,提高了智能汽車的主動安全性能。
同時,在彎道、交岔路口等潛在交通事故易發生區域,需既安全又快速地通過。本文提出的傳感器感知盲區安全距離模型保證了智能汽車在具有較高安全性能的前提下能夠快速地通過潛在交通事故易發生區域。
4.2 漸開式感知盲區仿真
仿真條件:前方為交岔路口,且道路環境中有樹木、建筑物的遮擋,影響智能汽車的環境感知。路面附著系數取0.7,傳感器感知環節時滯為0.2 s。汽車以80 km/h的車速正常行駛,經減速至36 km/h后駛入交岔路口,與此同時模擬8 s時盲區邊緣線處出現靜止的障礙物,汽車將立刻制動,直至將速度降為0。仿真中智能汽車速度及行駛位移如圖16所示。

圖16 漸開式感知盲區仿真速度、位移對比
由圖16可知:
(1)應用傳感器感知盲區安全距離模型,經過主動制動僅需1 s左右就已經完成駐車,且從感知到障礙物至自車靜止只經過了5.4 m,小于車輛與障礙物的相對距離,將不會追尾碰撞到前方靜止障礙物。
(2)應用基于制動過程的安全距離模型,經過主動制動需要3 s左右才能完全駐車,并且從出現障礙物至自車靜止經過了24.6 m,大于車輛與障礙物的相對距離,將會追尾碰撞到前方靜止障礙物。
4.3 跟隨式感知盲區仿真
仿真條件:智能汽車在彎道路徑行駛,道路環境中存在樹木、建筑物的遮擋,影響智能汽車的環境感知。路面附著系數取0.7,傳感器感知環節時滯為0.2 s。汽車以80 km/h的車速正常行駛,經減速至30 km/h后駛入右彎道,盲區邊界線距離智能汽車10 m左右,與此同時模擬盲區邊緣線處出現靜止障礙物,汽車將立刻制動,直至將速度降為0。仿真中智能汽車速度及行駛位移如圖17所示。

圖17 跟隨式感知盲區仿真速度、位移對比
4.4 仿真數據分析
由圖17可知, 應用傳感器感知盲區安全距離模型,經過主動制動僅需2 s左右就已經完成駐車,且從出現障礙物至自車靜止只經過了7.6 m,小于10 m,將不會追尾碰撞到前方靜止障礙物。應用基于制動過程的安全距離模型,經過主動制動需要4 s左右才能完全駐車,并且從出現障礙物至自車靜止經過了30.8 m,大于10 m,將會追尾碰撞到前方靜止障礙物。
4.5 實車試驗
采用一輛蘇州金龍的海格汽車進行實車試驗,該車具備高級輔助駕駛系統,將本文的算法編譯進其核心控制器中進行實車試驗。在車輛未能達到無人駕駛高等級且待測控制器性能未知的前提下,仍由駕駛員對車輛進行操縱。在無已知危險的情況下,駕駛員不會對制動執行機構進行操作。實車試驗主要分為兩個方向:①以正常車速在無交通信號燈且視野不開闊的十字路口右轉。②以正常車速駛入路邊存在高大灌木的彎道。在交岔路口和彎道存在靜態障礙物和不存在靜態障礙物兩種工況下進行實車試驗,以低于正常行駛車速通過交岔路口和彎道,漸開式感知盲區實車試驗數據如圖18所示,跟隨式感知盲區實車試驗數據如圖19所示。

圖18 漸開式感知盲區實車試驗數據

圖19 跟隨式感知盲區實車試驗數據
由圖18a可知,在考慮漸開式感知盲區的條件下,隨著車輛越來越接近交岔路口,車速逐漸降低,降低到安全車速后若未感知到障礙物則適當加速通過漸開式感知盲區;在不考慮傳感器感知盲區的條件下,車輛會以較高車速通過漸開式感知盲區。由圖18b可知,在考慮漸開式感知盲區的條件下,車輛速度較低,且會提前調整到安全車速,在感知到障礙物后緩慢制動至完全靜止,沒有與靜態障礙物發生碰撞;在不考慮漸開式感知盲區的條件下,車輛依舊以高速駛向交岔路口,制動完成時已經與靜態障礙物發生碰撞,危險程度高。
由圖19a可知,由于曲線不是隨時間的變化曲線,故同一距離處會顯示不同車速,車輛速度多變但相對保持穩定。由圖19b可知,車速會隨著車輛的制動平緩下降。
漸開式感知盲區和跟隨式感知盲區的實車試驗驗證了本文主動避撞算法的正確性和有效性,提高了無人駕駛汽車的主動安全性能。
5 結論
(1)提出了潛在交通事故的概念,將傳感器信息中道路特征消失邊緣作為可視移動障礙物的存在,建立感知盲區數據庫,搭建卷積神經網絡對感知盲區進行識別,根據其運動變化趨勢的不同,分為特征不同的3類,囊括了無人駕駛汽車行駛過程中可能出現的大部分傳感器感知盲區。
(2)基于傳感器感知盲區特征建立了傳感器感知盲區安全距離模型,在彎道、交岔路口等道路環境下,感知盲區條件下的安全距離模型效果明顯優于現有安全距離模型。
(3)較好的車速控制算法保證了行駛安全性,合適的安全距離能在保證智能汽車安全的基礎上使其快速通過彎道、交岔路口等潛在交通事故易發生區域,本文所提出的主動制動系統控制算法能夠有效提高智能汽車的主動安全性和道路通過率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
