無人機遙感技術在精量灌溉中應用的研究進展
2020-03-09 07:35:18韓文霆張立元牛亞曉
農業(yè)機械學報 2020年2期
韓文霆 張立元 牛亞曉 史 翔
(1.西北農林科技大學水土保持研究所, 陜西楊凌 712100; 2.西北農林科技大學機械與電子工程學院, 陜西楊凌 712100)
0 引言
21世紀農業(yè)面臨的最大挑戰(zhàn)是如何在有限土地和水資源情況下滿足人口增長和社會經濟發(fā)展對農業(yè)生產提出的更高要求[1]。預計到2050年,人口和社會經濟增長將使目前的糧食需求翻一番,發(fā)展中國家為了應對這一挑戰(zhàn),谷物產量需要增加40%,凈灌溉用水需求將增加40%~50%[2]。同時,全球氣候變化造成的干旱等自然災害加劇,全球生態(tài)環(huán)境保護需求對單位灌溉用水下的作物產量提出了更高的要求[3]。在此背景下,以提高農業(yè)用水效率為目標的精量灌溉成為未來農業(yè)灌溉的主要模式[4]。
精量灌溉的前提條件是對作物缺水的精準診斷和科學的灌溉決策。在土壤-植物-大氣連續(xù)體(Soil-Plant-Atmosphere continuum,SPAC)中,用于作物缺水診斷和灌溉決策的定量指標有3種:①根據(jù)農田土壤水分狀況確定灌溉時間和水量,考慮的因素包括不同作物適宜水分上下限、不同土壤條件、土壤水量平衡方程及參數(shù)選擇等。②根據(jù)作物對水分虧缺的生理反應信息確定是否需要灌溉,指標包括作物冠層溫度相對環(huán)境溫度的變化、莖果縮漲微變化、莖/葉水勢、莖流變化等。③根據(jù)作物生長的小環(huán)境氣象因素的變化確定灌溉的時間和作物的需水量,通過氣象因素確定作物的蒸騰蒸發(fā)量,進行灌溉決策[5]。
目前,上述用于作物缺水診斷和灌溉決策定量指標的信息獲取技術主要基于田間定點和地面車載移動監(jiān)測[6-7]。田間定點采用無線傳感器網(wǎng)絡技術,可以實現(xiàn)大面積監(jiān)測,但傳感器布點數(shù)量是個問題,布點少代表性差,不能滿足精量灌溉要求,布點多會增加成本,也會影響耕作。地面車載移動監(jiān)測克服了地面布點的缺點,但對于大面積農田灌溉來說仍然存在成本高的問題。利用衛(wèi)星遙感技術可以快速獲取大面積的土壤水分和作物蒸散發(fā)信息,國內外研究均取得了一定進展,但由于存在時空分辨率低、受天氣影響大等問題,在農田尺度上指導精準灌溉的實際應用中受到很大限制。精量灌溉技術的發(fā)展迫切需要一種高精度、高效率的大范圍農田土壤和作物水分信息快速感知技術。
無人機遙感技術近年來在農情監(jiān)測中開始得到廣泛應用。無人機起降靈活,可以機載多光譜、熱紅外、高光譜等相機,從根本上解決了衛(wèi)星遙感由于時空分辨率低而導致的瞬時拓延、空間尺度轉換、遙感參數(shù)與模型參數(shù)定量對應等技術難題。無人機遙感從技術上也克服了地面監(jiān)測效率低、成本高、影響田間作業(yè)等問題。無人機遙感系統(tǒng)可以高通量地獲取多個地塊的高時空分辨率圖像[8-10],使精準分析農業(yè)氣象條件、土壤條件、作物表型等參數(shù)的空間變異性及其相互關系成為可能,為大面積農田范圍內快速感知作物缺水空間變異性提供了新手段[11-12]。
在前人的研究中,無人機遙感系統(tǒng)已經應用在作物覆蓋度[13]、株高[14]、倒伏面積[15]、生物量[16]、葉面積指數(shù)[17]、冠層溫度[18]等農情信息的監(jiān)測上,但對作物缺水診斷和灌溉決策的定量指標,如水分脅迫指數(shù)[19]、土壤含水率[20]、作物需水量[21-22]等參數(shù)估計的研究才剛剛起步。本文對無人機遙感在這些定量指標監(jiān)測中的應用研究進展進行系統(tǒng)綜述,在此基礎上提出作物缺水診斷與灌溉決策定量指標無人機遙感的技術體系和研究重點,旨在明晰無人機遙感在灌溉技術中應用研究的技術思路和發(fā)展方向。
1 農田土壤水分無人機遙感監(jiān)測技術
無人機遙感技術以其高分辨率、高靈活性、低成本等優(yōu)勢彌了衛(wèi)星遙感的不足,逐漸成為農田土壤水分監(jiān)測的重要手段。目前監(jiān)測農田土壤水分的無人機遙感可以分為多光譜遙感、多光譜與熱紅外遙感協(xié)同以及高光譜遙感等技術。在基于無人機多光譜遙感的農田土壤水分監(jiān)測方面,研究學者主要基于多光譜遙感的單一波段[30]、多個波段或多個植被指數(shù)[31-33]。如王海峰等[30]選取單個土壤含水率敏感波段建立一元回歸模型來估計土壤水分,對于表層土壤(深度約1 cm)含水率的預測效果較好,相關系數(shù)均在0.92以上,均方根誤差均在0.10以內。楊珺博等[32]基于無人機多光譜遙感的多個波段信息,采用逐步回歸、偏最小二乘、嶺回歸等方法建立了土壤水分估計模型,3種回歸模型對10、20 cm深度的土壤水分都有較高的監(jiān)測精度,決定系數(shù)(R2)可達0.82。HASSAN-ESFAHANI等[33]基于無人機多光譜遙感獲取的多種植被指數(shù)建立表面土壤水分的人工神經網(wǎng)絡估計模型,相關系數(shù)達0.88。然而,由于土壤水分受氣象條件、土壤特性、植被狀況和地形等復雜因素的影響,一些研究學者在多光譜遙感提供的光譜信息基礎上協(xié)同熱紅外遙感提供的溫度信息,計算與土壤水分相關的溫度植被干旱指數(shù)(TDVI)等[34],或者在地形復雜地區(qū)的土壤含水率分布研究中,協(xié)同無人機遙感獲取的數(shù)字高程模型(DEM)來改善模型精度和適用性[35]。同時,為了進一步提高土壤水分估計模型在不同環(huán)境的適用性,GE等[36]基于無人機高光譜提取的二維光譜指數(shù)采用機器學習方法建立了比傳統(tǒng)光譜指數(shù)更穩(wěn)定的農田土壤水分估計模型,R2達0.90以上。
2 作物水分信息無人機遙感監(jiān)測技術
灌溉的真正對象是作物而不是土壤, 而且作物的生長情況實際上能綜合反映天氣和土壤水分的變化情況, 故合理的灌溉應以作物的生長情況為主要依據(jù)。以作物自身生理變化為指標的診斷方法最為直接、準確,在國內外被廣泛作為作物水分脅迫狀況的參考值,主要包括徑流[37]、莖水勢[38-39]、葉水勢[40-41]和氣孔導度[42-43]等,作物的水分狀況會在這些作物生理和生長狀況的指標上直接反映出來。但這種信息主要來自單個作物,需要有合理的空間分布性或者校正樣本。隨著農業(yè)集約化、規(guī)模化、現(xiàn)代化的發(fā)展,進行統(tǒng)一灌溉管理的農田面積不斷增加,由土壤、作物空間變異特性引起的作物水分脅迫空間變異問題將不可避免[44]。因此,對整個農田的作物水分脅迫狀況及其差異性的研究非常重要,目前主要通過冠層溫度、植被參數(shù)等指標進行分析[5]。
當土壤含水率充足時,環(huán)境溫度的上升會造成氣孔導度增大、蒸騰速率提升,最終使得冠層溫度相對穩(wěn)定[45]。然而,當土壤含水率不足時,作物氣孔導度和蒸騰速率會下降,導致蒸騰降溫效果變弱,從而造成冠層溫度升高[46-47]。為了更好地應對水分脅迫,除了蒸騰速率下降、氣孔開度減小和冠層溫度上升等癥狀,作物還會表現(xiàn)出葉子卷曲、葉面積降低等癥狀[48]。同時,為了保證機體組織不被破壞,作物還會盡可能減少光的吸收以及散去多余的已吸收能量,最終表現(xiàn)為葉綠素濃度的降低、光合速率降低以及葉黃素循環(huán)組分含量增加等[49-51]。水分脅迫發(fā)生時,作物在冠層溫度、冠層結構以及葉片色素含量上的變化為基于無人機遙感技術的作物水分脅迫分布信息空間變異性感知奠定了基礎。
在衛(wèi)星和航空影像技術進一步發(fā)展和成熟前,近地面移動車載測量地物吸收和反射光譜的地物光譜儀正在成為低成本高密度獲取農田缺水空間變異信息的技術手段,由于光譜儀反應時間短、精度高、穩(wěn)定性強,所以適宜長時間安裝在移動的機器上進行田間作物長勢調查。圓形噴灌機能夠覆蓋整個灌溉田塊的特點為光譜儀的安裝提供了便利。但是光譜數(shù)據(jù)在變量灌溉中的應用研究起步較晚。O′SHAUGHNESSY等[52]首次基于機載式紅外測溫儀觀測了作物冠層溫度,開啟了基于作物冠層溫度的動態(tài)變量灌溉分區(qū)方法研究。微型無人機遙感平臺憑借成本低、易于構建、運載便利、靈活性高、作業(yè)周期短、影像數(shù)據(jù)分辨率高等優(yōu)勢,可以低成本地多次重復采集農業(yè)遙感數(shù)據(jù),使其在多時相、地物的識別能力上具有獨有的優(yōu)勢,使得作物水分脅迫信息空間變異性的迅速、細致感知成為可能[4,43,53]。基于無人機遙感技術的作物水分脅迫診斷方法根據(jù)作物對水分脅迫的不同響應,可以分為基于紅外測溫技術和基于冠層反射光譜兩類[24,54]。
2.1 作物水分信息無人機遙感監(jiān)測技術體系
無人機遙感技術在作物水分脅迫信息感知研究方面具有很大的應用潛力,已經被成功地應用到玉米[43]、棉花[55-58]、西紅柿[59]、果園[38,60]、大豆[58,61]以及葡萄園[62-63]的水分脅迫分布信息的監(jiān)測。完整的基于無人機遙感技術的作物水分信息感知技術體系如圖1所示。該技術體系主要包括圖像采集與預處理、基于溫度指數(shù)的水分脅迫感知和基于植被指數(shù)的水分脅迫感知。其中,圖像采集與處理主要包括無人機飛行參數(shù)設計、數(shù)據(jù)采集、地理信息匹配和圖像拼接及校正處理;基于溫度指數(shù)的水分脅迫感知主要包括溫度校正、冠層溫度提取和基于溫度的脅迫指數(shù)建立;基于植被指數(shù)的水分脅迫感知主要包括反射率分布圖獲取和水分脅迫敏感植被指數(shù)選取或建立[43,64-65]。
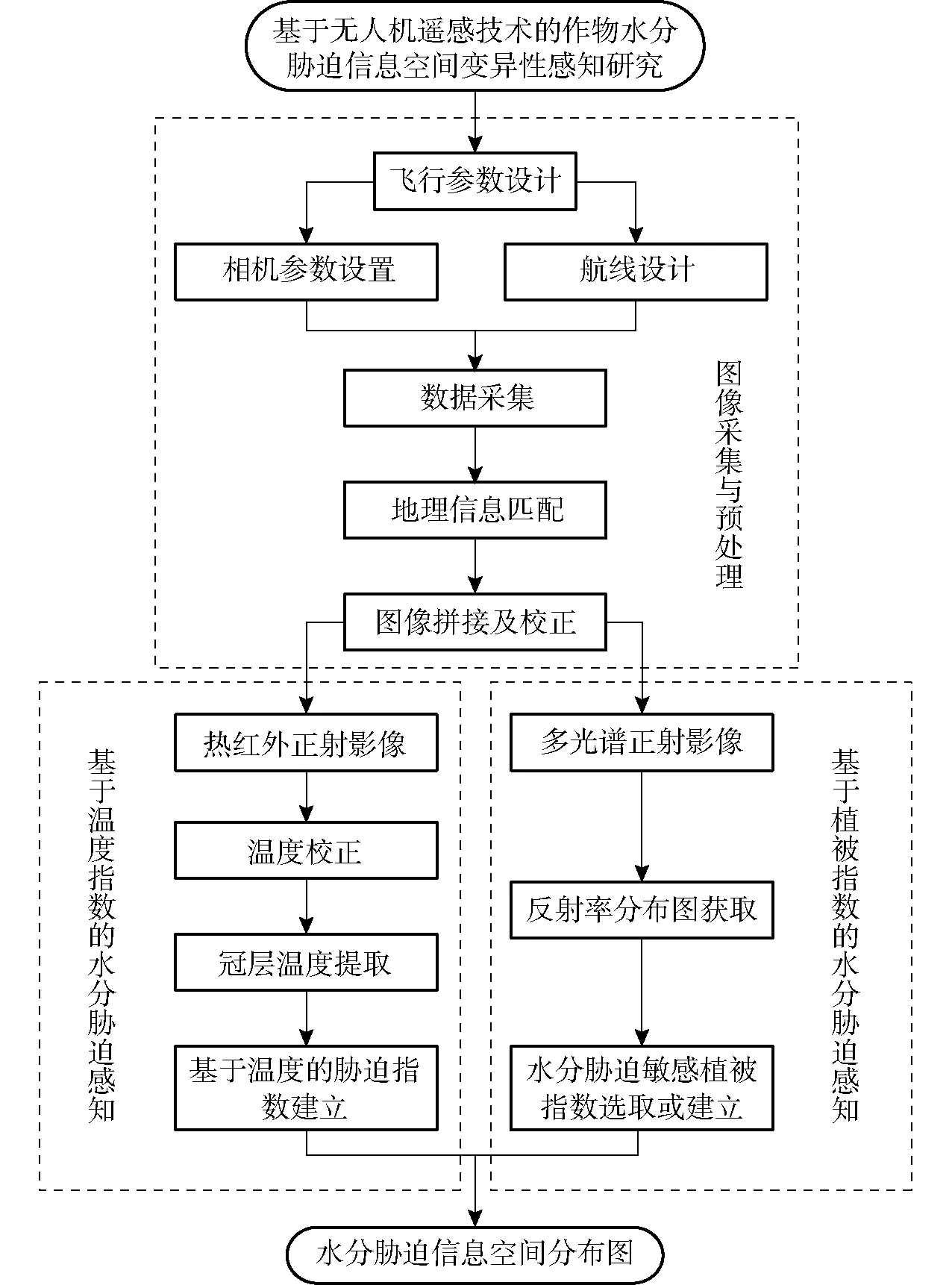
圖1 基于無人機遙感技術的作物水分脅迫信息感知技術體系
2.2 基于溫度指數(shù)的作物水分信息無人機遙感技術
2.2.1無人機熱紅外遙感圖像的溫度校正方法
受限于無人機平臺載重能力,目前無人機熱紅外遙感系統(tǒng)集成的熱紅外相機多為較輕的非制冷相機,缺少制冷裝置,具有獲取溫度不穩(wěn)定等問題[64-65]。在提取作物冠層溫度之前還需要對熱紅外圖像進行校正,主要包括:非均勻性校正、缺陷像素校正、快門校正、輻射定標和溫度校正[64]。在當前使用的非制冷熱相機中,非均勻性校正、缺陷像素校正和快門校正由系統(tǒng)固件執(zhí)行。而對于輻射校正來說,作物呈現(xiàn)在熱紅外相機上的溫度主要受到大氣溫度、相對濕度、地物輻射率以及感知距離的影響[66-67]。在利用無人機熱紅外遙感系統(tǒng)采集作物冠層溫度數(shù)據(jù)之前,需要將數(shù)據(jù)采集時刻的相應數(shù)據(jù)在熱紅外相機系統(tǒng)中進行設置,以減少溫度感知誤差。例如,在利用FLIR Vue Pro R 640采集作物熱紅外圖像時,可以利用其配套的手機應用程序Flir UAS以藍牙連接的方式設置數(shù)據(jù)采集時刻的大氣溫度、相對濕度、地物輻射率和數(shù)據(jù)采集高度等信息,從而進行輻射校正[43]。在溫度校正方面,常常建立利用溫槍等手持設備采集的地面觀測值與無人機熱紅外圖像溫度值之間的線性模型[58,67-68]。如楊文攀等[69]利用HT-11D 便攜式測溫儀和熱紅外相機同步測量了玉米葉片、輻射定標板等地物的溫度,建立了兩者之間的線性模型,并用于校正熱紅外圖像。ZHANG等[43]利用RAYTEK ST60+便攜式測溫儀和熱紅外相機同步測量了玉米冠層溫度,建立了兩者之間的線性模型,并用于校正熱紅外圖像。
2.2.2基于無人機熱紅外遙感圖像的作物冠層溫度提取方法
利用小型榨油機榨取油脂,其出油率在21.1%~24.6%,其中三層模式的出油率平均最高,達到23.5%,此時毛葉山桐子油料最終含水量在8%,這與其他油料作物(如油菜)安全水分相近[12]。榨取的毛油酸價和過氧化值分別在 3.1~3.4 mg/g,2.1~2.9 mmol/kg,并且各處理各干燥層數(shù)值無顯著差異(p>0.05),均低于國家對菜籽、油茶籽等毛油的品質標準規(guī)定,優(yōu)于崔艷南等人[13]研究的未處理的工廠化毛葉山桐子毛油品質,這與干燥前處理與設備均有關系。
在大田作物的覆蓋度未達到全覆蓋之前,冠層溫度的準確提取是有效監(jiān)測作物水分脅迫分布信息的另一個關鍵問題。由于無人機熱紅外相機具有相對較低的分辨率(320像素×240像素~640像素×480像素)[70],在作物冠層溫度提取中如何有效剔除土壤和其他地物所帶來的影響仍是個挑戰(zhàn),其常用方法主要為閾值法和多源遙感影像融合等。閾值法只需要熱紅外遙感影像,其核心為采用機器學習算法(聚類、Otsu和邊緣檢測等)尋找作物和非作物的溫度分類閾值[71-72]。如LUDOVISI等[73]分別利用Matlab和eCognition軟件中的兩種自動閾值分割方法提取了楊樹的冠層溫度。PARK等[38]利用結合Sobel和Canny算子的邊緣檢測算法提取了油桃和桃子的冠層溫度。張智韜等[57]利用Otsu算法和基于Canny算子的邊緣檢測算法提取了棉花的冠層溫度。然而,由于無人機熱紅外遙感影像在農場尺度應用時較低的空間分辨率,混合像元在基于閾值法的作物冠層溫度提取中會造成較大誤差。為了減少冠層溫度的提取誤差,國內外學者提出了基于多源遙感圖像融合的冠層溫度提取方法。該方法通過其他較高空間分辨率的遙感影像將土壤等的非冠層像元進行掩膜處理,然后與熱紅外遙感圖像融合的方式提取冠層溫度。如POBLETE等[63]提出了基于無人機多光譜和熱紅外遙感影像融合的葡萄藤冠層溫度提取方法,最終建立的作物水分脅迫指數(shù)與莖水勢的R2為0.77。ZHANG等[43]提出了基于無人機可見光和熱紅外遙感影像融合的大田玉米冠層溫度提取方法,最終提取的玉米冠層溫度與地面實測值的R2為0.94,均方根誤差為0.7℃。然而,基于多源遙感圖像融合的冠層溫度提取方法的精度仍然受到作物分布信息提取精度的影響,在未來的研究中還需從高分辨率遙感圖像中更為精準地提取作物分布信息。
2.2.3基于冠層溫度的作物水分脅迫指數(shù)
在高效、準確提取作物冠層溫度之后,選擇或建立可以準確表征作物水分脅迫狀況的溫度指數(shù)是有效監(jiān)測作物水分脅迫分布信息的另一個關鍵問題。在TANNER[74]首次使用冠層溫度作為表征作物水分脅迫狀況并量化了作物冠層溫度差異和水分脅迫之間的關系之后,國內外許多研究人員將作物冠層溫度應用到與作物水分脅迫狀況相關的研究中。如BAI等[75]將基于無人機熱紅外遙感圖像提取的大豆冠層溫度作為水分脅迫指數(shù),分析了不同基因型大豆對水分脅迫的抗性,結果表明冠層溫度是快速鑒定大豆干旱相關性狀的有效指標。然而,大氣溫度等外界環(huán)境同樣會對冠層溫度造成影響[76],僅僅利用冠層溫度不能很好地表征作物水分脅迫。研究人員開始利用冠層溫度與空氣溫度之差作為作物水分脅迫指數(shù)。如JACKSON等[77]發(fā)現(xiàn)當小麥沒有遭受水分脅迫時,其冠層溫度與空氣溫度的差接近或小于零,而當遭受水分脅迫時該值會大于零。
為了進一步消除外界環(huán)境對基于冠層溫度的水分脅迫指數(shù)監(jiān)測效果的影響,IDSO等[78]提出作物水分脅迫指數(shù)(Crop water stress index,CWSI)經驗法,JACKSON等[79]提出CWSI理論法,并成為目前應用最為廣泛的基于溫度的作物水分脅迫指數(shù)。在實際應用中,CWSI理論模型需要測量作物冠層溫度、空氣溫濕度、太陽凈輻射、風速和株高等參數(shù)且計算過程復雜,但受環(huán)境變化的影響較小;與理論模型相比,CWSI經驗模型只需測量作物冠層溫度、空氣溫濕度且計算簡單,但易受環(huán)境影響且需要針對不同的氣候條件和種植模型建立對應的上、下基線[80]。國內外許多研究人員成功地將CWSI經驗模型和理論模型應用到作物水分脅迫狀況監(jiān)測。如IRMAK等[81]以地中海半干旱條件下玉米為研究對象基于經驗法建立的CWSI模型,實現(xiàn)了對夏玉米水分脅迫狀況的監(jiān)測和量化,并建立了產量與季節(jié)性平均CWSI的關系模型。TAGHVAEIAN等[82]以美國科羅拉多州北部的向日葵為研究對象,建立了CWSI經驗模型,并分析了CWSI與葉面積指數(shù)、葉水勢等的相關性。孫道宗等[83]通過觀測冬季和春季塑料大棚中不同灌溉條件下茶樹的冠層溫度、空氣溫濕度、太陽凈輻射、風速和株高等參數(shù),分別建立了CWSI經驗模型和理論模型,得出了反映茶樹水分狀況的關系曲線,并研究分析了兩者反映茶樹水分脅迫的差異性。張立元等[84]以內蒙古自治區(qū)鄂爾多斯市達拉特旗大田玉米為研究對象,研究分析了不同CWSI經驗模型無水分脅迫基線和無蒸騰作用基線建立方法對該地區(qū)氣候條件和種植模式的適用性,研究結果表明,基于田間空氣溫濕度數(shù)據(jù)建立的CWSI經驗模型較為合理,可以有效監(jiān)測大田玉米水分脅迫狀況。然而,前人研究表明CWSI經驗模型的無水分脅迫基線具有較大的變異性[37],如在不同地點建立的玉米CWSI經驗模型無水分脅迫基線的斜率范圍為-1.10~-3.77℃/kPa,相應的截距范圍為0.42~3.11℃[4]。造成CWSI經驗模型無水分脅迫基線變化的原因主要可以歸結為:不同地點氣候條件的不同[85-86]、冠層溫度及空氣溫濕度采集位置的不同[87]、冠層溫度測量設備及方式的不同[37]、不同作物品種之間的差異[88]。
同時,為了降低基于冠層溫度的水分脅迫指數(shù)的建立難度,還有一些研究人員利用作物冠層溫度在熱紅外遙感圖像的分布情況建立了可以表征作物水分脅迫的指標,如冠層溫度標準差(CTSD)和冠層溫度變異系數(shù)(CTCV)等。HAN等[89]利用EM算法(Expectation-maximization algorithm)模擬玉米冠層溫度的高斯分布規(guī)律,計算并分析CTSD 對作物水分脅迫的響應。張智韜等[57]基于無人機熱紅外圖像采用Canny邊緣檢測算法將熱紅外圖像中的土壤背景有效剔除,計算并分析了棉花冠層溫度特征數(shù)CTSD和CTCV與棉花葉片氣孔導度、蒸騰速率、CWSI、土壤體積含水率的相關關系。提高CWSI模型在不同地區(qū)、針對不同氣候條件和作物品種的通用性,以及簡化基于冠層溫度的作物水分脅迫指數(shù)的建立方法將是未來研究的重點內容。
2.3 基于植被指數(shù)的作物水分信息無人機遙感技術
盡管利用紅外測溫技術獲取冠層溫度監(jiān)測作物水分脅迫狀況十分有效,并且在一些研究中已經建立了相關的監(jiān)測方法。但是基于多光譜波段建立相關作物水分脅迫監(jiān)測方法也具有作物生理特性支撐[90],同樣可以作為有效的作物水分脅迫分布信息空間變異性感知手段。目前,根據(jù)水分脅迫作物不同生理變化的敏感性,可以將對水分脅迫敏感的窄波段多光譜植被指數(shù)分為3類:葉黃素相關指數(shù)、葉綠素相關指數(shù)和冠層結構相關指數(shù)。
2.3.1葉黃素指數(shù)
由GAMON等[91]提出的葉黃素指數(shù)(Photochemical reflectance index,PRI)在一些研究中已經成功地作為作物水分脅迫指標進行了測試[92-94]。然而,PRI指數(shù)受冠層結構、色素含量和時間尺度的影響較大[24,94],且其在地面遙感和無人機遙感尺度上的水分脅迫監(jiān)測能力尚不穩(wěn)定[95]。如MAGNEY等[51]通過地面遙感技術在旱地春小麥兩個生長季中對PRI指數(shù)的水分脅迫監(jiān)測性能進行了評估,結果發(fā)現(xiàn)PRI需要校正因季節(jié)變化帶來的葉片色素含量和葉面積指數(shù)變化的影響,同時可能也需要在更為精細的時間頻率下進行測量。SUREZ等[96]在航空尺度上評估了PRI指數(shù)對橄欖園水分脅迫信息的監(jiān)測效果,結果發(fā)現(xiàn)其受冠層結構和背景地物的影響較大。為了減少冠層結構和葉片色素含量對PRI指數(shù)水分脅迫監(jiān)測效果的影響,一些研究人員開始構建PRI指數(shù)的變體。如,ZARCO-TEJADA等[94]提出了一個基于PRI的改進指數(shù)(PRInorm)來跟蹤水分脅迫的日變化趨勢,該指數(shù)通過結合冠層結構指數(shù)(重組差異植被指數(shù),Re-normalized difference vegetation index,RDVI)和葉綠素指數(shù)(紅邊比值植被指數(shù),r700/r670)的方式來減小冠層結構和葉片色素含量對PRI指數(shù)水分脅迫監(jiān)測效果的影響,結果表明PRInorm與常用水分脅迫指標CWSI、葉水勢和氣孔導度具有較高的相關性且大于PRI指數(shù)。然而對于PRI指數(shù)的變體,仍需要在大量田間實驗研究中進一步驗證其水分脅迫監(jiān)測效果的穩(wěn)定性。
2.3.2葉綠素和冠層結構相關指數(shù)
與葉黃素相關指數(shù)相比,葉綠素和冠層結構相關指數(shù)在窄波段多光譜植被指數(shù)當中更為常見,已被廣泛應用到多種作物生長信息監(jiān)測中,如葉綠素含量反演[97]、葉面積指數(shù)反演[17]、生物量反演[98]等。當持續(xù)水分脅迫發(fā)生時,葉片卷曲或下垂[99],葉綠素含量下降[100],誘導的結構或顏色變化一直被認為是作物水分脅迫的視覺指標[42,101]。在遙感領域,由葉片結構或葉綠素含量變化引起的特定波段反射率的減少或增加,為利用無人機窄帶多光譜植被指數(shù)監(jiān)測作物水分狀況奠定了基礎。如,BALUJA等[102]使用基于無人機的多光譜系統(tǒng)評估葡萄莊園水分狀況的空間變異性,結果顯示歸一化植被指數(shù)(NDVI)和轉化葉綠素吸收反射率(TCARI)與優(yōu)化土壤調節(jié)植被指數(shù)(OSAVI)的比值與氣孔導度(R2=0.84,p<0.05)、莖水勢(R2=0.68,p<0.05)高度相關,NDVI與TCARI/OSAVI可認為是良好的水分脅迫指標。ESPINOZA等[62]研究無人機多光譜圖像在評估商業(yè)葡萄園地下灌溉配置變化中的適用性時發(fā)現(xiàn),綠色標準化差異植被指數(shù)(GNDVI)和氣孔導度之間存在顯著相關性,Pearson相關系數(shù)為0.65。雖然,基于無人機窄波段多光譜建立的植被指數(shù)已經成功應用于監(jiān)測多種作物的水分脅迫狀況,但在建立植被指數(shù)與作物水分脅迫相關的生理特性指標(如氣孔導度和莖水勢)的關系時,研究人員發(fā)現(xiàn)其相關性具有較大的波動性。如,以莖水勢為水分脅迫參考時,其R2在0.01~0.68之間波動[39]。因此,還需要針對植被指數(shù)水分脅迫監(jiān)測效果的波動性進行進一步研究。
3 作物需水量無人機遙感估算
作物水分脅迫是由供水不足導致的,表現(xiàn)為土壤含水率減少時植物對水分缺乏的生理反應。作物對水分脅迫的響應程度取決于環(huán)境條件和作物需耗水量,因為灌溉必須補充因作物蒸散發(fā)而損失的土壤水分[24]。1998年聯(lián)合國糧農組織(FAO)提出了通過參考作物蒸散量(ET0),使用作物系數(shù)法[103]估算作物蒸散量ET,并給出不同地區(qū)不同作物的作物系數(shù)推薦值,僅需要氣象資料就可以估算作物ET。作物系數(shù)法有較強的普適性,在世界范圍內被廣泛地應用。然而,由于作物生長狀況、氣象條件和水分脅迫等因素的綜合影響,田間作物時空尺度上用水存在差異性,使用推薦的作物系數(shù)估算蒸散量誤差較大,必須進行校正才能使用[103]。很多方法采用了能量平衡方程以估計實際蒸騰量ETc,而多光譜植被指數(shù)的方法用于估算作物蒸散量不需要過多的數(shù)據(jù),因此比能量平衡方程式更簡單。目前的無人機多光譜監(jiān)測系統(tǒng)比熱紅外系統(tǒng)使用起來更簡便,因此目前無人機遙感在作物需水量估算方面的應用主要還是集中在基于多光譜植被指數(shù)的方法。基于無人機遙感和能量平衡方法的應用研究還沒有相關成果報道,僅在區(qū)分冠層溫度和土壤溫度方面剛開始有人研究,因此本文主要綜述基于作物系數(shù)法的作物需水量無人機遙感估算研究進展。
3.1 作物系數(shù)Kc無人機遙感估計
目前,在作物需水量估算和土壤-植物連續(xù)體水量平衡監(jiān)測中,F(xiàn)AO-56作物系數(shù)法可分為單作物系數(shù)法和雙作物系數(shù)法。單作物系數(shù)法是將植物蒸騰和土壤蒸發(fā)整合到作物系數(shù)Kc中,雙作物系數(shù)法是使用兩個系數(shù)來分離植物蒸騰(Kcb)和土壤蒸發(fā)(Ke)對蒸散發(fā)的影響[103]。與單作物系數(shù)法相比,雙作物系數(shù)法由于可區(qū)分作物蒸騰和土壤蒸發(fā),能夠更加精確地計算農田ET。在估計作物系數(shù)Kc或估計基礎作物系數(shù)Kcb方面,地面光譜技術估算基礎作物系數(shù)Kcb精度較好,主要因為Kcb表征作物蒸騰量,與植被生長狀態(tài)相關,但比較費時費力,難以應用在區(qū)域或大田尺度上[103]。衛(wèi)星遙感技術可以較好地估算區(qū)域尺度的作物系數(shù),但由于該技術拍攝周期長且影像分辨率低,難以滿足大田作物日蒸散量的估算要求[103]。無人機遙感技術可以較好地估算特定條件下的日作物系數(shù),滿足大田玉米日作物系數(shù)估算需求[11],但現(xiàn)有研究中,整個生育期作物系數(shù)估算方法研究較少,模型精度有待進一步提高。張瑜等[21]研究了整個玉米生育期不同水分脅迫條件下,無人機多光譜植被指數(shù)、葉面積指數(shù)、表層土壤含水率和作物系數(shù)的關系(R2=0.60,RMSE為0.21),表明作物系數(shù)與植被指數(shù)(Simple ratio index,SR)、葉面積指數(shù)和表層土壤含水率的相關程度與水分脅迫程度相關。韓文霆等[22]建立了大田玉米不同生育期不同水分脅迫條件下6種無人機多光譜植被指數(shù)與作物系數(shù)關系模型,結果表明在快速生長期充分灌溉條件和生長后期水分脅迫條件下,植被指數(shù)SR與作物系數(shù)的相關性最好(R2分別為0.94和0.85)。
3.2 作物水分脅迫系數(shù)Ks無人機遙感估計
當土壤含水率降低到閾值時,作物發(fā)生水分脅迫現(xiàn)象,在作物系數(shù)法中需要利用水分脅迫系數(shù)Ks修正土壤水分脅迫對作物蒸散發(fā)的影響。因此精確計算Ks對于估計水分脅迫條件下的作物蒸散發(fā)很重要。目前估算作物水分脅迫系數(shù)Ks分為直接法和間接法。間接法需要先獲取作物的潛在蒸騰量(ETp)和實際蒸騰量(ETc),然后通過Ks=1-ETc/ETp計算得到Ks。基于傳統(tǒng)的FAO-56方法直接計算Ks是目前使用最廣泛的方法,在FAO-56中需要通過水量平衡方程來得到每天的土壤根系層的消耗水量,這就需要準確地監(jiān)測土壤根系層的水分變化。基于TDR等儀器的單點土壤水分測量雖然具有很高的精度,但是這些監(jiān)測方法往往需要布設大量昂貴的傳感器。在此基礎上有很多研究提出了基于溫度數(shù)據(jù)來計算作物水分脅迫系數(shù)Ks。溫度數(shù)據(jù)可以通過便攜式溫槍或是紅外測溫儀(Infrared thermometer,IRT)測量[24]。如OLIVERA-GUERRA等[104]利用實測的地表溫度和光譜數(shù)據(jù)反演植被和土壤溫度來直接估算FAO-56雙作物系數(shù)法中的Ks。JACKSON等[79]和BAUSCH等[105]分別提出了基于冠層溫度的水分脅迫指數(shù)CWSI、Tcratio與Ks的關系式。KULLBERG等[106]基于這兩種方法結合FAO-56雙作物系數(shù)法計算了當?shù)刈魑锏淖魑镎羯l(fā),R2分別為0.86和0.83。即使基于冠層溫度計算Ks的方法很大程度地減少了監(jiān)測難度,這種方法和基于土壤含水率計算Ks一樣,都很難代表整個研究區(qū)域的水分脅迫狀況,尤其是在土壤作物空間異質性大的情況下。遙感因其非破壞性和空間化的監(jiān)測方式,近年來在作物脅迫監(jiān)測領域已經顯示出了獨特的優(yōu)勢。由于基于衛(wèi)星光學遙感數(shù)據(jù)估算土壤和根區(qū)水分(或根區(qū)耗水)存在一定的困難,因此利用衛(wèi)星遙感數(shù)據(jù)估算水分脅迫系數(shù)Ks的研究較少。而無人機作為一個新興的遙感平臺,具有成本低、易于構建、運載便利、靈活性高、作業(yè)周期短、影像數(shù)據(jù)分辨率高等優(yōu)勢,可以低成本地多次重復采集農業(yè)遙感數(shù)據(jù)的優(yōu)點。ZHANG 等[107]利用熱紅外無人機獲取的CWSI得到大田作物的Ks空間分布,并且通過此結果優(yōu)化得到的土壤總有效水量和水量平衡方程來反演玉米和葵花地土壤根系層的消耗水量,相對于傳統(tǒng)的水量平衡估算精度(平均絕對誤差和均方根誤差)有了很大的提高(玉米為40%和44%,葵花為22%)。
4 無人機遙感在變量灌溉中的應用
4.1 變量灌溉管理分區(qū)
適時、準確地獲取和感知農田作物對水分脅迫的響應是變量灌溉處方圖生成的核心技術[108]。傳統(tǒng)的精準灌溉技術中變量灌溉處方圖生成模型的研究主要基于土壤特性,如電導率和田間持水量等[109]。根據(jù)土壤電導率分布圖以在不同的區(qū)進行獨立水量平衡分析的方式生成田間持水量管理區(qū),但使用的降雨數(shù)據(jù)和蒸散發(fā)數(shù)據(jù)是相同的。同時,由于作物生長狀況是土壤水分狀況的直接反映,且隨著空間信息技術和作物生長信息監(jiān)測儀器、收獲機械產量監(jiān)測系統(tǒng)的快速發(fā)展,出現(xiàn)了基于作物特征如作物生物量、產量和平均葉水勢等[110-112]的變量灌溉管理分區(qū)研究。在衛(wèi)星和航空影像技術進一步發(fā)展和成熟前,近地面移動車載測量地物吸收和反射光譜的地物光譜儀正在成為低成本高密度獲取農田缺水空間變異信息的技術手段。O′SHAUGHNESSY等[52]首次基于噴灌機機載紅外測溫儀觀測了作物冠層溫度,開啟了基于作物冠層溫度的動態(tài)變量灌溉分區(qū)方法研究。利用衛(wèi)星遙感技術可以快速獲取大面積的土壤水分和作物蒸散發(fā)信息,國內外研究均取得了一定進展,但衛(wèi)星遙感由于存在時空分辨率低等問題,在指導變量灌溉的實際應用中受到很大限制。
4.2 變量灌溉決策技術
決策支持系統(tǒng)是變量灌溉的核心組成部分,其管理方法是指用于指導特定區(qū)域的灌溉時間和灌水量的灌溉制度。NAVARRO-HELLN等[113]開發(fā)了一種自動智能灌溉決策支持系統(tǒng)(Smart irrigation decision support system,SIDSS),用于管理農業(yè)灌溉。該系統(tǒng)以土壤測量值和氣候變量為數(shù)據(jù)基礎,采用閉環(huán)控制方案,以偏最小二乘回歸(PLSR)和自適應神經模糊推理系統(tǒng)(ANFIS)兩種機器學習技術為SIDSS推理引擎,估算人工林的每周灌溉需求,該方法已在西班牙東南部的3個柑桔商業(yè)種植園中得到驗證。NAIN等[114]使用灌溉決策系統(tǒng)來產生適合丘陵地區(qū)灌溉和施肥的決策輸出。MILLER等[115]開發(fā)了一種基于地理空間信息的決策支持系統(tǒng),該系統(tǒng)使用自然資源保護服務網(wǎng)格土壤調查地理數(shù)據(jù)庫評估控制方案和潛在節(jié)水情況,根據(jù)土壤水平衡方法,開發(fā)了變量灌溉處方圖。AgroClimate是用于提高灌溉效率的決策工具(http:∥mz.agroclimate.org/),其灌溉決策基于每日的作物蒸散量[116]。大多數(shù)灌溉決策系統(tǒng)是針對特定的農作物或農田而設計的,很難將其應用于其他地區(qū)或其他作物。鑒于此,YANG等[117]開發(fā)了用于靈活灌溉計劃的決策支持系統(tǒng),用戶可以通過用戶界面修改其輸入?yún)?shù),以提高系統(tǒng)的普適性。
決策支持系統(tǒng)在灌溉系統(tǒng)中的應用取決于可靠的決策方法和決策信息數(shù)據(jù)源。天氣預報信息是估算作物需水量的一種方法[118],但是該方法忽略了農作物特性和空間變異性。一些研究使用傳感器和全球定位系統(tǒng)(Global positioning system,GPS)來收集特定土壤和植物信息。SUI 等[119]建立了無線傳感器網(wǎng)絡以監(jiān)測土壤含水率并收集氣象數(shù)據(jù)。O′SHAUGHNESSY等[52]使用紅外溫度傳感器節(jié)點,將其安裝在中心支軸式噴灌機的桁架上測量區(qū)域中作物冠層溫度。MORARI等[120]使用時域傳感器測量土壤水分含量。由于這些傳感器是固定的,因此灌溉決策精度取決于農田區(qū)域或噴灌機桁架上的傳感器數(shù)量,并且這些傳感器的大規(guī)模部署對于移動式灌溉系統(tǒng)來說并不經濟。同時,安裝在農田的傳感器對農田土壤生態(tài)系統(tǒng)有害。
4.3 無人機遙感在變量灌溉決策中的應用
遙感技術彌補了固定式傳感器的缺陷,具有實時性好和覆蓋面積廣的優(yōu)點。目前,無人機載熱紅外相機多為較輕的非制冷相機,缺少制冷裝置,具有獲取溫度不穩(wěn)定等問題,同時易受氣溫和人類活動的影響[64]。與無人機熱紅外遙感系統(tǒng)相比,無人機多光譜遙感系統(tǒng)在信息獲取穩(wěn)定性和拼接質量方面具有更好的技術成熟度。同時,作物在冠層結構以及葉片色素含量上對水分脅迫的響應引起的特定波段反射率的變化,也為基于無人機多光譜植被指數(shù)的作物水分脅迫感知奠定了基礎。因此,開始有研究人員使用無人機多光譜圖像計算得到的植被指數(shù)(Vegetation index,VI)反演水分脅迫指數(shù)(CWSI)。如ZHANG等[4]使用高分辨率的無人機多光譜圖像來繪制玉米水分脅迫狀況圖。
決策支持系統(tǒng)已被一些農場使用,但依然存在一些問題。首先,決策支持系統(tǒng)的輸出是控制系統(tǒng)的輸入信息,在一些控制系統(tǒng)中,實際灌溉量不能完全等同于農作物的需水量,決策支持系統(tǒng)應該是與控制系統(tǒng)結合。控制系統(tǒng)的常用方法包括區(qū)域控制和速度控制[121]。速度控制可改變中心樞軸的移動速度以實現(xiàn)所需的灌溉深度,而占空比控制改變了單個噴頭或噴頭組的開關時間達到所需的灌溉深度。其次,針對不同地區(qū)或不同農作物建立的CWSI/Kc反演模型(VI-Kc/VI-CWSI)差異較大。不同的農作物具有不同的最優(yōu)VI-Kc/VI-CWSI模型[122-123]。不同地區(qū)同一作物的VI-Kc/VI-CWSI也不同[124]。基于固定模型的決策支持系統(tǒng)適用范圍較狹窄。最后,灌溉量是多因素決策的結果。實際上,精確測量灌溉需求是復雜的,其實施需要大量的資金和時間。
模糊推理系統(tǒng)的概念已被廣泛地用于決策支持。模糊系統(tǒng)具有規(guī)則簡單、適用范圍廣等特點[125],可以分析不準確信息,從復雜的農田信息中獲得需要的信息指導灌溉[126]。作物生長狀態(tài)與灌溉量之間的相互關系并不總是精準的。因此,模糊推理模型對于灌溉決策是一個行之有效的辦法。SHI等[127]利用無人機多光譜圖像建立了中心支軸式變量灌溉決策支持系統(tǒng)。該系統(tǒng)可以處理無人拍攝的多光譜圖像并計算植被指數(shù),并通過植被指數(shù)和已有的模型計算得到作物水分脅迫指數(shù)(CWSI)和作物系數(shù)(Kc)。將作物水分脅迫系數(shù)作為作物當前的水分狀態(tài),單作物系數(shù)法得到的ETc和未來7 d的降雨作為預測水分耗損量和補充量,三者同為模糊輸入,通過模糊推理系統(tǒng)得到每個管理區(qū)域的灌溉參考量。決策系統(tǒng)將生成電磁閥占空比控制圖,指導變量灌溉控制系統(tǒng)實現(xiàn)變量灌溉。
4.4 無人機遙感在變量灌溉中應用的技術體系
根據(jù)已有研究基礎,總結出無人機遙感在變量灌溉中應用的技術體系,如圖2所示。首先根據(jù)作物缺水診斷和變量灌溉對無人機遙感圖像的技術要求優(yōu)化無人機遙感系統(tǒng)作業(yè)參數(shù),以保證獲取農田高質量的可見光、多光譜和熱紅外遙感圖像,地面同時進行土壤水分、冠層溫度、作物形態(tài)參數(shù)和綠度參數(shù)等的監(jiān)測。其次利用無人機可見光圖像和地面形態(tài)參數(shù)監(jiān)測結果篩選與作物缺水相關性較強的形態(tài)參數(shù)指標并進行反演,建立基于作物形態(tài)參數(shù)的缺水信息無人機遙感診斷模型。然后基于無人機多光譜遙感圖像和地面作物綠度參數(shù)監(jiān)測結果進行多種植被指數(shù)和作物系數(shù)Kcb的計算,建立基于作物綠度參數(shù)的缺水信息無人機遙感診斷模型。然后基于無人機熱紅外遙感圖像和地面溫度參數(shù)監(jiān)測結果計算作物缺水指數(shù)CWSI,建立基于溫度參數(shù)的缺水信息無人機遙感診斷模型。然后采用多變量分析的數(shù)學方法,對上述3種類型參數(shù)和指標進行綜合分析,建立多指標綜合分析的作物缺水信息無人機遙感診斷模型,并繪制農田作物缺水量空間分布圖。最后依據(jù)灌水量決策系統(tǒng)及變量灌溉系統(tǒng)控制參數(shù),研究變量灌溉分區(qū)方法,建立基于GIS的變量灌溉處方圖生成模型,指導精準灌溉。

圖2 無人機遙感在變量灌溉技術中應用的技術體系
5 結論
(1)無人機遙感在灌溉技術中的應用是近幾年灌溉領域的研究熱點之一。無人機遙感系統(tǒng)可以高通量地獲取多個地塊的高時空分辨率圖像,使精準分析農業(yè)氣象條件、土壤條件、作物表型等參數(shù)的空間變異性及其相互關系成為可能,為大面積農田范圍內快速感知作物缺水空間變異性提供了新手段,在變量灌溉等技術應用中具有明顯的優(yōu)勢和廣闊的前景。
(2)無人機遙感系統(tǒng)已經應用在作物覆蓋度、株高、倒伏面積、生物量、葉面積指數(shù)、冠層溫度等農情信息的監(jiān)測,但在用于作物缺水診斷和灌溉決策的定量指標監(jiān)測方面的研究剛剛起步,目前主要集中在作物水分脅迫指數(shù)(CWSI)、作物系數(shù)、冠層結構相關指數(shù)、土壤含水率、葉黃素指數(shù)(PRI)等參數(shù)估計的研究,有些指標已經成功應用于監(jiān)測多種作物的水分脅迫狀況,但對于大多數(shù)作物和指標來說,模型的普適性還有待進一步研究。
(3)作物自身水分信息無人機遙感監(jiān)測技術主要包括基于溫度指數(shù)的水分脅迫感知和基于植被指數(shù)的水分脅迫感知。基于溫度指數(shù)的水分脅迫感知主要包括溫度校正、冠層溫度提取和基于溫度的脅迫指數(shù)建立;基于植被指數(shù)的水分脅迫感知主要包括反射率分布圖獲取和水分脅迫敏感植被指數(shù)選取或建立。
(4)建立了無人機遙感在變量灌溉技術中應用的技術體系,主要通過無人機獲取大面積農田作物超高時空分辨率的可見光、近紅外、熱紅外等遙感圖像,提取和反演土壤參數(shù)、作物形態(tài)參數(shù)、綠度參數(shù)以及冠層溫度,結合地面數(shù)據(jù)同化技術,建立基于作物形態(tài)參數(shù)、綠度參數(shù)及溫度參數(shù)的作物缺水診斷模型,依據(jù)作物缺水空間分布和灌溉決策方法,生成變量灌溉處方圖,實現(xiàn)精準灌溉。
(5)為滿足不同尺度的高效率監(jiān)測和實現(xiàn)農業(yè)用水精準動態(tài)管理的需求,今后無人機遙感需要結合衛(wèi)星遙感和地面監(jiān)測系統(tǒng)。天空地一體化農業(yè)水信息監(jiān)測網(wǎng)絡優(yōu)化布局方法與智能組網(wǎng)技術、多源信息時空融合與同化技術、農業(yè)灌溉大數(shù)據(jù)等將是未來重點研究內容。
