眼科手術導航的OCT圖像畸變矯正
2020-03-07 02:03:06范立成沈超逸
光學精密工程 2020年1期
關鍵詞:手術
陳 聰,楊 帆,范立成,沈超逸
(蘇州大學 機電工程學院,江蘇 蘇州 215000)
1 引 言
白內障是世界上導致人眼失明的主要眼科疾病,全世界因白內障致盲的患者約占6%[1-2]。目前,人工手術存在撕囊困難,超聲乳化能量過高等問題。隨著生物醫學成像技術及激光技術的發展[3],由光學相干斷層掃描成像導航的飛秒激光輔助白內障手術已經漸漸取代了人工白內障手術[4-9],其具有手術時間短,精度高,細胞損傷低等優點。
光學相干斷層掃描(Optical Coherence Tomography,OCT)是20世紀90年代由D.Huang 等提出的一種新的成像方法,具有成像速度快,分辨率高的特點,能夠實現整個眼前節成像,被廣泛應用于眼科疾病診斷[10-11]。而將其應用到眼科手術導航中需要確定其成像位置。目前,國際上已有的數種完善的飛秒激光輔助白內障手術系統均使用OCT為手術進行導航,獲取指定手術位置的相關信息。但是人眼做為一個光學系統本身具有屈光能力,角膜等組織會帶來光程上的變化,OCT重構眼組織結構必然會產生實際位置誤差,這在臨床手術中會產生極大影響。所以有必要提出相關方法,矯正圖像重建時由于組織折射帶來的實際成像位置偏差。國內外有許多學者對此展開了研究,D.Borja等在譜域光學相干層析成像系統中使用幾何光學分析方法[12],對成像組織內部進行光學追跡,但僅僅矯正了晶狀體的誤差; YU-CHERNG CHANG[13]等提出使用光學距離直接乘以相應折射率的方法直接計算厚度信息。
針對眼科手術中需要快速獲取指定手術區域的深度信息,本文提出了一種將OCT應用到飛秒激光白內障手術導航的方法,其具體為OCT掃描位置的定位和OCT圖像信息的矯正。本文基于掃頻OCT及光學CCD相機搭建的實驗平臺,結合數字圖像處理,對掃描坐標系和相機坐標系進行坐標匹配,完成OCT掃描定位,最終達到指定位置掃描的目標。然后基于光學基本斯涅爾定律和費馬原理,結合圖像處理相關算法對OCT圖像進行矯正,建立了矯正的相關數學模型。
2 OCT圖像導航方法
2.1 OCT掃描定位

圖1 本文系統結構示意圖
本文通過二向色鏡組合掃頻光相干斷層成像系統(SS-OCT)和光學CCD相機,系統結構如圖1所示(SS-LASER:掃頻光源;FC:光纖耦合器;Cir:光纖環形器;M:反射鏡;CL:光纖準直器;BD:平衡光電探測器;GS:振鏡;L:聚焦透鏡;DML:負壓吸引環),掃頻光源(HSL-20,Santec,Japan)發出的光經90/10光纖耦合器分光,90%的光經光纖環形器1(Cir1)后進入參考臂模塊,10%的光經光纖環形器2(Cir2)后進入樣品臂模塊。參考臂由平面反射鏡將光返回并由Cir1傳入50/50光纖耦合器,樣品臂光經透鏡組L1,L2擴束后由XY振鏡(GVSM002/M,Thorlabs,USA)改變光的二維空間位置,由L3聚焦入射到樣品,由樣品不同深度層面形成各自的后向散射并原路返回由Cir2傳入50/50光纖環形器,形成的干涉信號由雙通道平衡探測器(PDB470C 400 MHz,Thorlabs,USA)接收,探測器內含兩個互相匹配的光電二極管和超低噪聲的高速互阻放大器,能夠將信號相減處理有效消除工模噪聲。接收到的信號經光電轉換后由12位雙通道高速數據采集卡(APX5200A,Santec,JAPAN)以500 MHz的采樣率記錄。系統最大軸向掃描速度50 kHz,軸向分辨率12.55 μ m,在空氣中最大成像深度15.5 mm。CCD實時檢測樣品實際情況,負壓吸引環固定樣品。
本文利用紅外顯示光板確定激光的實際掃描位置來定位OCT掃描路徑。吸環為透明物體,它所在的實際坐標系即被觀測樣品所在坐標系。本文通過獲取相機的圖像像素坐標系、吸環坐標系以及OCT掃描坐標系之間的幾何關系,實現樣品的定位測量,具體步驟如下:
(1)吸環坐標系獲取
使用光源照明吸環,由于吸環灰度值明顯區分于周圍物體,通過設定閾值范圍的方法,即可實現吸環提取如圖2右所示。由于左邊還存在部分非吸環物質,在對其做最小內切圓后,使用HALCON區域中心提取算子area_center,即可得出被觀測樣品的中心位置(x0,y0)(圖2右)。

圖2 光斑初始位置(左)和樣品坐標中心(右)
(2)OCT掃描坐標提取
OCT掃描位置由振鏡決定,首先給出振鏡X軸、Y軸電壓為0 V,將紅外探測光板置于吸環下方。圖2左可清晰看見光板上OCT掃描原點為一亮點,提取其中心像素坐標即為原點位置為(x1,y1)(圖2左)。
(3)坐標系配準
如圖3所示,根據坐標系轉換公式得:
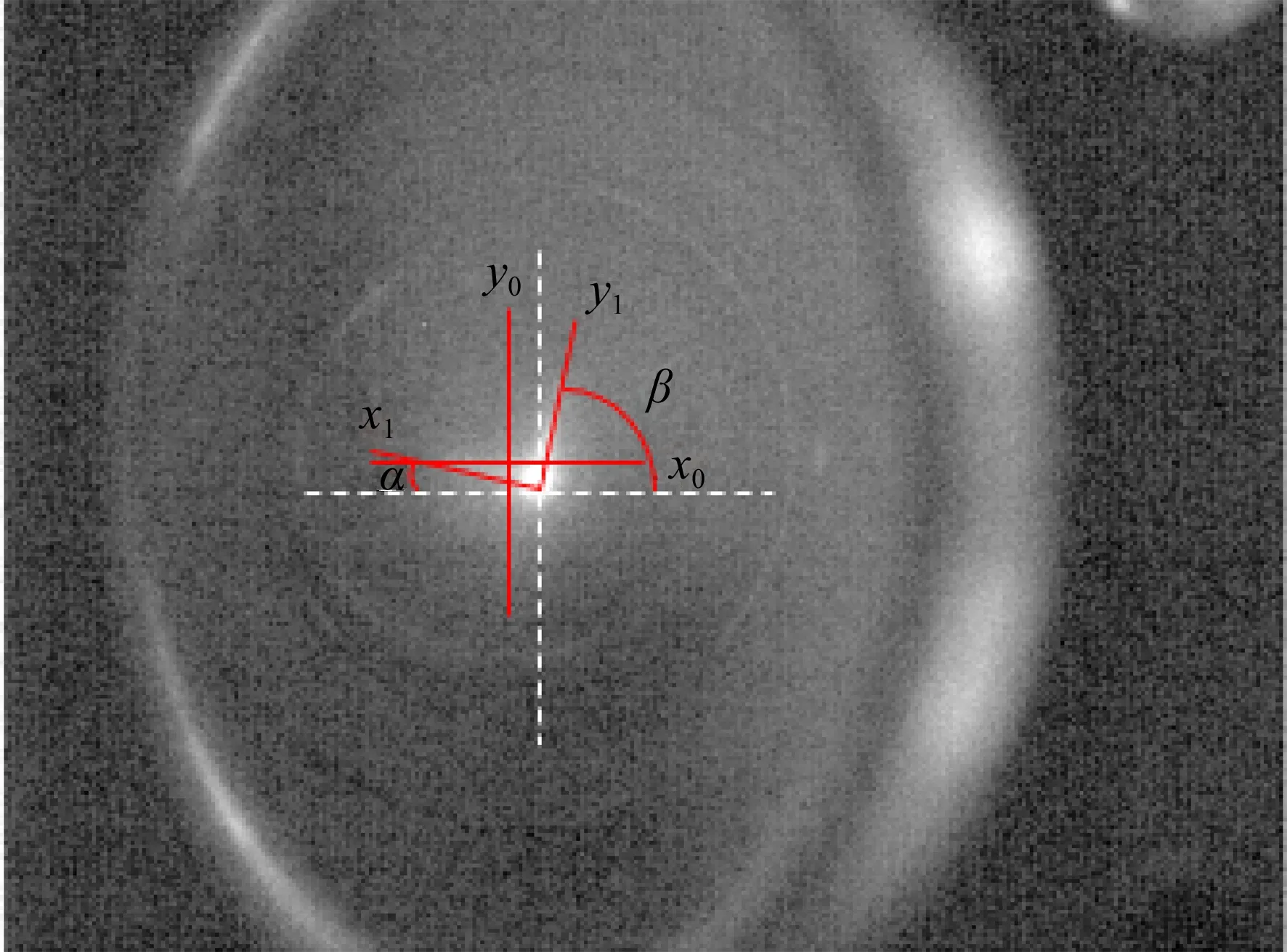
圖3 光斑初始坐標系和樣品中心坐標系
為驗證本定位掃描方法對于引導OCT掃描指定位置的精確性,本文在完成前述定位掃描的基礎上,進行了樣品指定位置成像,對半徑為3 mm的亞克力半球為樣品以水平,垂直方向不同位置進行掃描,通過OCT的圖像上最高點A和最低點B和A-SCAN圖(圖4)上相應的峰值點獲取深度方向信息,將其與樣品相應位置計算得到的理論深度值進行比較。得到的結果如圖5所示。理論深度值和測量值的誤差在50 μm以內,可以說明標定的誤差極小,測量誤差由被測樣品的加工精度和實驗數據的多次測量取平均值保證。

圖4 OCT圖像和相應的A-SCAN圖
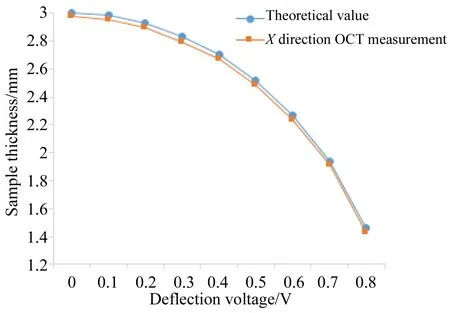

圖5 X,Y方向理論深度值和測量值對比
2.2 OCT圖像矯正理論分析
如圖6為OCT重建圖像時的光路傳播。假設OCT光束經聚焦透鏡后以垂直于水平面方向射入被測樣品,(n0,n1,n2)分別表示不同的介質折射率。當(n0,n1,n2)三者相等且分隔界面為水平面時,光線由點(a,b)出射,繼續以垂直于水平面方向經過點(a1,b1)和(x1,y1)。這種情況下,重建所得二維圖像即為樣品實際內部圖像,僅需將整體深度除以介質折射率即可獲得樣品內部實際信息。

圖6 理論OCT重建光線示意圖
OCT在對樣品成像時不考慮光線折射、分隔界面幾何形狀以及光透過不同樣品時實際光程變化,但在實際應用中,各樣品內部不同深度往往折射率各不相同,且不同介質間的分隔層面幾何形狀各式各樣。如圖7所示為實際情況下OCT重建光線示意圖,設點(x0,y0)為OCT成像位置,點(x1,y1)為實際位置,即矯正后圖像所在位置。

圖7 實際OCT重建光線示意圖
根據折射定律和費馬原理得到角膜下表面矯正公式如式(1)所示:
(1)
即可求得矯正后的點(x1,y1)的坐標。

(2)
囊膜矯正公式如式(3)所示:
(3)

(4)

3 實驗驗證
3.1 實驗1
使用玻璃管(圖8(a))進行實驗驗證,經游標卡尺測量得到其厚度為1.02 mm(圖8(b)),對樣品使用OCT采取圖像(圖8(c)),使用水平集方法[14]提取樣品輪廓(圖8(d)),圖像矯正后如圖8(e)所示。矯正前玻璃管厚度為1.43 mm,矯正后玻璃管厚度為1.03 mm,基本符合實際情況;玻璃管內壁由畸形的弧形矯正為半圓形,矯正后的圖像基本符合玻璃管成像截面形狀,故矯正有效。

圖8 對玻璃管進行實驗驗證
3.2 實驗2
對特定位置使用采取到的豬眼角膜圖像和OCT圖像(圖9),通過像素點位置相互關系測定其虹膜間距,如表1所示。

圖9 特定掃描軌跡OCT圖像
表1OCT與CCD圖像虹膜間距實驗數據對比表
Tab.1 Comparison of experimental data of OCT and CCD image iris spacing (mm)

Iris spacing of OCT imagesIris spacing of CCD imagesErrorA6.146.020.12B4.184.000.18C5.765.630.13D4.864.750.11Average value0.135
OCT橫向掃描誤差約在135 μm左右,橫向誤差較小,在手術接受范圍內,可以忽略不計,故無需矯正。
4 結 論
本文通過OCT系統和CCD相機,結合數字圖像處理相關知識,對OCT圖像導航系統在飛秒激光輔助白內障手術中所需要的標定進行方法研究,成功將掃描坐標系和樣品坐標系進行坐標匹配,完成指定位置的圖像掃描(深度誤差約為50 μm),并通過光學相關定理對OCT圖像進行重構誤差矯正,經由實驗驗證可以準確矯正OCT圖像的誤差,達到飛秒激光輔助白內障手術的精度要求。為在飛秒激光輔助白內障手術中應用OCT圖像導航打下堅實的基礎。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48
