瓷磚檢測機器人的聲音信號處理
2020-02-25 13:31:25張旭超孫傳斌秦慶旭
科技創新與應用 2020年4期
關鍵詞:特征提取
張旭超 孫傳斌 秦慶旭


摘? 要:本系統包括:聲音預處理部分、AD轉換芯片、單片機芯片以及顯示和按鍵部分。系統先采集敲擊不同空鼓狀態瓷磚時發出的聲音并得到特征參數,同時輸入該聲音所對應的空鼓范圍,利用麥克風采集聲音,將采集的數據經放大、濾波后,AD轉換芯片對其進行數模轉換,這就完成了預處理。而后將預處理后的聲音數據存儲在單片機中,單片機接收到AD芯片轉換的數據后,與子程序所提取的聲音信號特征參數進行比較,與之前建立的模板進行匹配并完成識別,最后將識別結果的數據傳輸給顯示模塊進行結果顯示。
關鍵詞:聲音信號;特征提取;單片機系統;特征頻率
中圖分類號:TN912? ? ? ? 文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)04-0029-02
Abstract: The system includes: sound preprocessing part, AD conversion chip, single-chip microcomputer chip and display and key part. The system first collects the sound produced when striking the ceramic tiles of different empty drum states and obtains the characteristic parameters, at the same time, inputs the corresponding range of the empty drum, collects the sound with the microphone, amplifies and filters the collected data, and carries on the digital-to-analog conversion to it by the AD conversion chip, which completes the preprocessing. Then the preprocessed sound data is stored in the single-chip microcomputer. After receiving the data converted by the AD chip, the single-chip microcomputer compares the characteristic parameters of the sound signal extracted by the subroutine, matches with the previously established template and completes the recognition. Finally, the data of the recognition result is transmitted to the display module to display the results.
Keywords: sound signal; feature extraction; single chip microcomputer system; feature frequency
1 聲音識別的特征參數
在對聲音信號進行特征提取時,特征參數需要滿足:
(1)參數之間的獨立性較為顯著;
(2)聲音的本質能夠有效的反映出來,區分性良好;
(3)特征參數和特征參量的獲取較為簡單,能夠實時實現各種聲音的識別。
2 巡檢機器人的聲音識別算法
對于時域離散信號(或序列)x(n),可用序列的傅里葉變換來表示其頻域信號X(ejw)。
為時域離散信號x(n)的傅里葉變換,式中FT是傅里葉變換的縮寫。
3 預處理過程
采集到的聲音未經處理之前是模擬信號,而且存在不同雜音的干擾。所以在解析處理聲音信號前,要放大聲音信號,對聲音信號進行濾波、模數轉換等一系列操作,即信號的預處理。
4 聲音的采集放大模塊
機器人在運行時要考慮到存在多種外界干擾聲音,故而我們使用麥克風來采集外界聲音,減法器在后面用來濾除外界干擾,得到機器人敲擊瓷磚時發出的聲音。
5 聲音信號的濾波
聲音信號的濾波,就是在信號分析處理中使用某種技術去除某些多余分量的過程。通俗來講,就是濾除聲音信號中無用的、對有用的信號產生了干擾、混疊的分量,只剩下有用分量,這一過程也可稱為去干擾或者去噪。一般在對聲音信號分析之前會先對信號進行濾波處理,為了有效增加信號處理的精度,更可靠的處理信號,設計有效可靠的濾波器就顯得尤為重要。由于各個頻率段濾除的頻率不同,信號濾波技術可被劃分為帶通和帶阻濾波、低通濾波、高通濾波。電子設置使通過有用的頻率信號,而同時抑制無用的頻率信號就是所謂的濾波電路。在工程上常常會使用濾波電路對聲音信號進行數據傳送、信號處理和抑制干擾等。
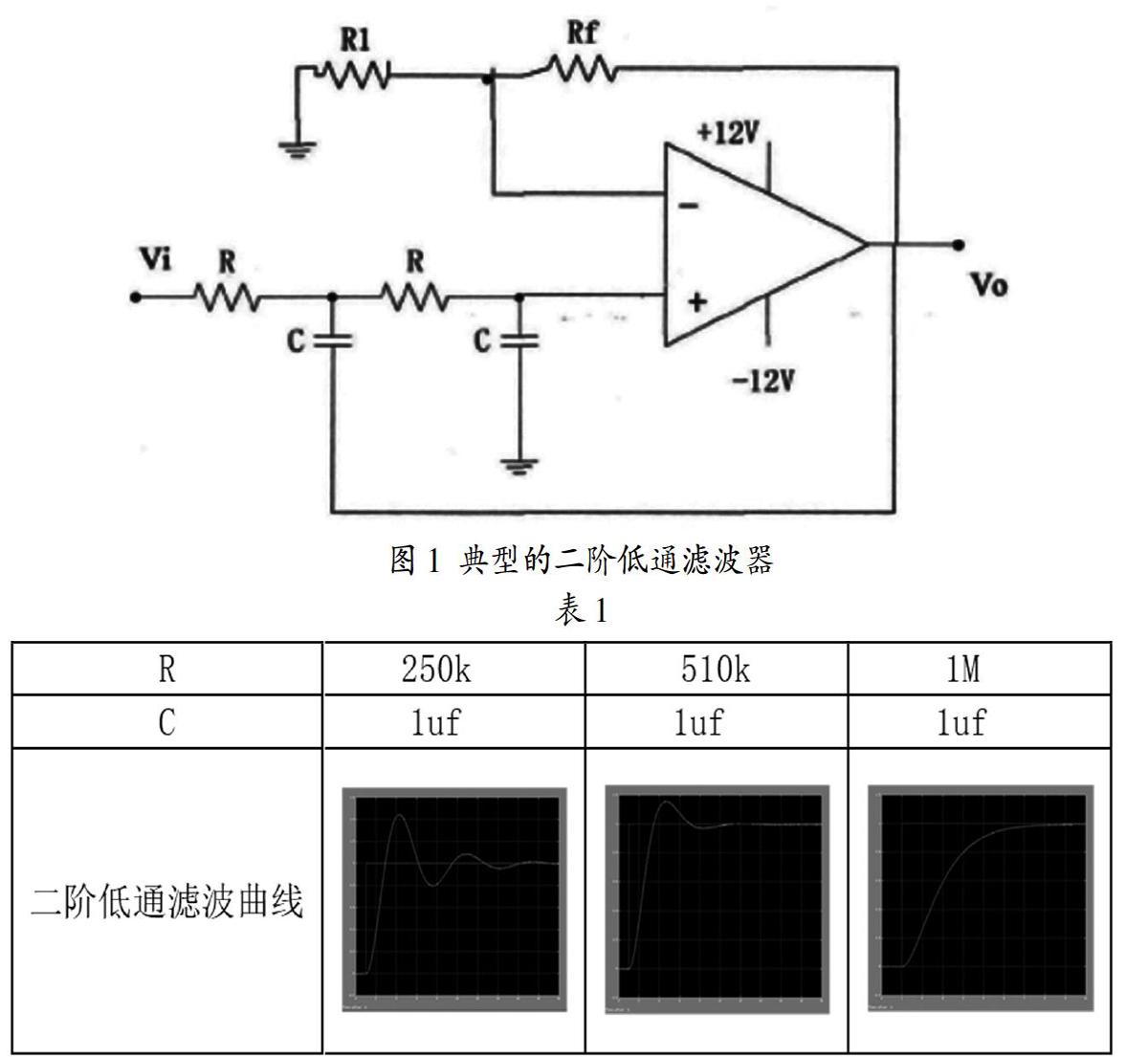
20Hz-20kHz是一般聲音信號的頻率范圍,模數轉換前需要的預濾波器一般有兩個:低通濾波器和高通濾波器。其中“經過全橋整流”,顯然是要得到直流電壓。用二階低通濾波器處理聲音信號的目的是濾去雜音的聲波,從而使得到的直流電壓更理想和平直。
二階低通濾波電路通過使輸出電壓下降的速率在高頻段更快,從而使濾波效果得到更好的改善,所以設計中采用二階低通濾波器作為實際中用來處理信號的低通濾波器。
AD轉換器是保證模擬信號源和數字信號源能夠聯系中間器件,它能將模擬信號在持續變化的情況下轉變為數字信號,便于計算機和數字系統進行處理、存儲、控制和顯示。
本文所包含的主要內容有:(1)在學校圖書館以及各
大網站搜集相關資料,基本學習并了解了有關聲音檢測技術的基本原理和相關操作。(2)根據實際需求在能夠實現目的操作的前提下選擇單片機、爬墻車等相關器件,完成組裝、編程和調試。(3)根據所設計的電路利用Altium Designer畫出相應的原理圖和PCB板圖。(4)介紹了瓷磚檢測機器人的工作環境以及聲音信號的處理方法,利用C語言完成了對單片機的控制,使用SPSS處理收集到的數據實現了最小二乘法直線擬合及其仿真分析。
參考文獻:
[1]孟影.基于聲音信號的監測系統設計[D].安徽大學,2015.
[2]杜世斌.基于音頻特征的電氣設備故障監測算法研究[D].山東大學,2014.
[3]李晶,孫農亮,滕升華.基于聲音識別的設備狀態檢測算法[J].信息技術,2015(06):94-98.
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49