基于流挖掘的分布式驅動電動汽車橫向穩定控制*
2020-02-21 08:22:32劉聰陳勇趙理
汽車技術 2020年2期
劉聰 陳勇,2 趙理,2
(1.北京信息科技大學,北京 100192;2.北京電動車輛協同創新中心,北京 100192)
主題詞:電動汽車 轉向狀態預測 穩定性控制 流挖掘 馬爾可夫模型
1 前言
分布式驅動電動汽車每個輪轂電機獨立可控,通過合理分配各驅動輪的驅、制動力,可實現橫向穩定性控制[1-3]。近年來,針對分布式驅動電動汽車橫向穩定性控制,國內外學者已取得大量的研究成果。X.J.Jin等設計了一種魯棒增益調度H∞控制器,通過跟蹤理想橫擺角速度和質心側偏角產生附加橫擺力矩實現橫向穩定性控制[4]。林程等采用高階滑模控制器,以變量誤差和誤差變化率作為控制對象,有效提高了汽車的操縱穩定性[5]。考慮到駕駛員行為與執行機構之間存在時間延遲,模型預測控制(Model Prective Control,MPC)采用滾動優化及反饋校正的方法預測未來一段時間內系統狀態,計算目標函數的最優解,預測系統未來的輸出,在車輛橫向穩定性控制方面已有大量理論研究[6-11]。但MPC運算復雜,對硬件要求高,將極大地增加整車開發成本,同時,在車輛高頻控制領域上難以保證精確的實時預測性。
本文針對分布式驅動電動汽車,提出一種基于轉向狀態預測的穩定性分層控制策略。運用滑模控制理論計算當前時刻施加的橫擺力矩,基于流挖掘技術及馬爾可夫模型預測下一時刻轉向狀態,模糊控制器根據預測值決策附加橫擺力矩需求。采用前、后軸動態載荷轉移方法,基于總期望橫擺力矩實現各車輪驅動轉矩的合理分配。
2 車輛動力學模型
如圖1所示,利用線性二自由度的車輛模型進行控制器的設計,該模型能代表轉向操縱穩定性的基本特征[12],包括側向運動和橫擺運動。圖1中,β為質心側偏角;wr為橫擺角速度;a、b分別為質心與前、后軸的距離;δ為前輪轉角;L=a+b為軸距;u、v分別為車輛縱向、側向速度;af、ar分別為前、后輪側偏角;Fyf、Fyr分別為前、后輪受到的側向力。
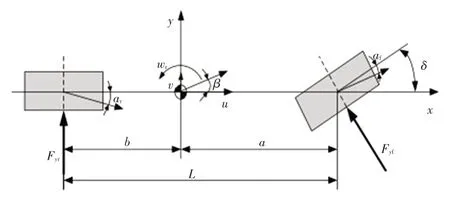
圖1 二自由度汽車模型
基于二自由度車輛模型,側向運動和橫擺運動的表達式為:
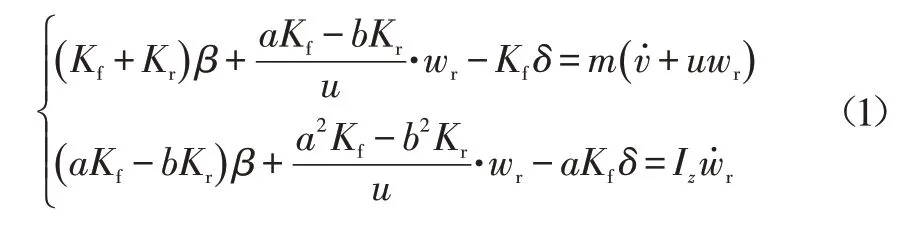
式中,Kf、Kr分別為前、后輪的側偏剛度;β為質心側偏角;m為整車質量;Iz為整車繞z軸的轉動慣量。
當車輛進入穩態時,橫擺角速度wr和質心側偏角β均為定值,此時,wr=0,β=0,理想橫擺角速度wrq和質心側偏角βq分別為:
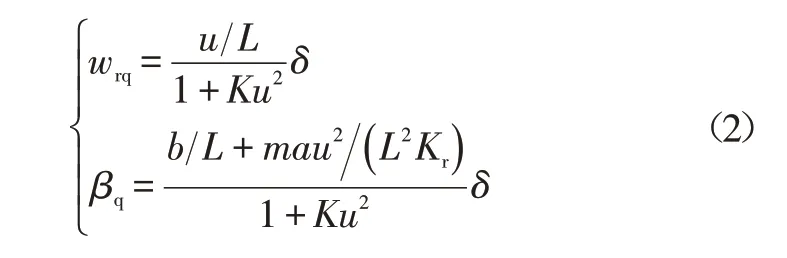
式中,K為穩定性因數。
車輛轉向過程中,側向加速度受到輪胎在路面上附著能力的限制,不能超過路面所能提供的側向加速度極限值。因此,理想橫擺角速度需滿足:

式中,μ為路面附著系數;g為重力加速度。
綜上,理想橫擺角速度的限定值為:

當車輛進入穩態響應時,橫擺角速度wr為定值,此時v=0、wr=0,代入式(1)得到穩態橫擺角速度增益為:
根據K的取值,汽車的穩態響應可分為不足轉向、中性轉向和過多轉向。本文根據實際橫擺角速度和理想橫擺角速度差值及前輪轉角方向判斷車輛所處的轉向狀態,以此進行下一步的穩定性控制器設計。
3 整車穩定性控制器設計
本文采用3層結構設計轉向穩定性控制器:上層確定當前時刻施加的橫擺力矩,采用滑模控制器,根據二自由度模型得到的當前時刻車輛的理想橫擺角速度和理想質心側偏角,計算出同時跟蹤這兩個控制變量所需施加的橫擺力矩;中層確定施加的附加橫擺力矩,采用轉向狀態預測及模糊控制,基于流挖掘技術及馬爾可夫模型的預測算法,預測下一時刻車輛的轉向狀態,通過模糊控制決策出未來時刻需要的附加橫擺力矩;下層為驅動力矩分配器,根據得到的總需求橫擺力矩和其他約束條件,分配各車輪所需的驅動力矩。控制系統的具體結構如圖2所示。
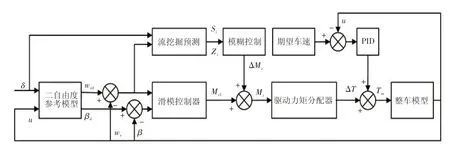
圖2 橫擺穩定性控制器結構原理
3.1 基于滑模控制的橫擺力矩決策
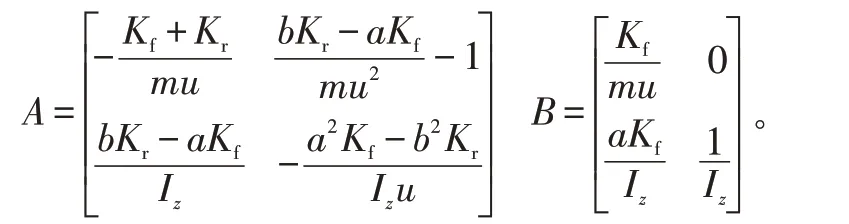
考慮到車輛的質心側偏角和橫擺角速度是車輛穩定性的重要狀態變量,針對分布式驅動電動汽車,運用滑模控制理論,以線性二自由度車輛模型為基礎,進行質心側偏角和橫擺角速度聯合控制,設計針對當前時刻的橫向穩定控制器。二自由度狀態空間方程為:

式中,Mz1為從上層控制器施加的等效橫擺力矩;
滑模平面定義為:

對s求導可得:

式中,λ為滑模面控制參數。
為了改善趨近運動的動態品質,定義等速趨近律[13]為:

式中,?為系統的運動點趨近于切換面s=0的速率。
為了解決系統中符號函數引起的抖振問題,采用飽和函數對其進行替換:
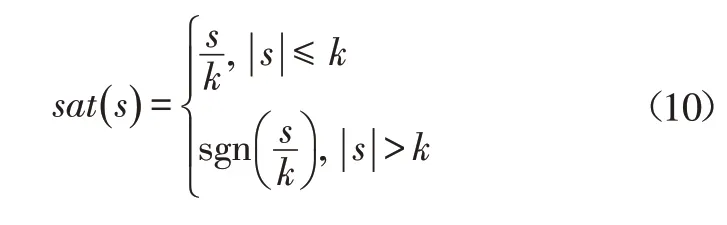
式中,k為邊界層厚度。
由式(6)、式(8)~式(10)得到施加的橫擺力矩:
3.2 馬爾可夫理論
馬爾可夫過程(Markov Process)是一類隨機過程,其未來的演變只與當前狀態有關,不依賴于過去的狀態。馬爾可夫過程{Xn,n∈T}的參數集T為離散的時間集合,即T={0,1,2,…},對任意的正整數n∈T和任意的離散的狀態集I={i0,i1,…,in+1},其條件概率滿足:

系統由n時刻的狀態i轉移到(n+1)時刻狀態j的一步轉移概率為:

本文基于馬爾可夫模型,考慮車輛的轉向狀態構建轉移概率矩陣。
3.3 基于流挖掘技術的轉向狀態預測
流挖掘技術是1998年數據流概念提出后興起的,是從快速或連續的數據記錄中提取知識的過程[14]。考慮到車輛運行數據流的實時、連續、龐大等特性,流挖掘中概要數據構建技術、滑動窗口技術以及自適應等技術可用于解決車載處理器有限的存儲空間和計算能力問題,為整車控制器設計奠定了重要基礎[15]。
根據采集的當前行駛工況數據,將計算得到的期望橫擺角速度與實際橫擺角速度的偏差e和采集的前輪轉角δ分類。為了顧及駕駛員的乘坐舒適性,避免產生過大或過小的附加橫擺力矩,本文將橫擺角速度偏差e分成7組,分別對應大不足轉向、中不足轉向、小不足轉向、中性轉向、小過多轉向、中過多轉向、大過多轉向,如表1所示。設定相對應的橫擺角速度偏差閥值e1~e6,當下一時刻車輛為中性轉向時,控制器將不會開啟。設定前輪的左轉向為正,每個行駛周期的狀態量為Si(i=1,2,…,7)。
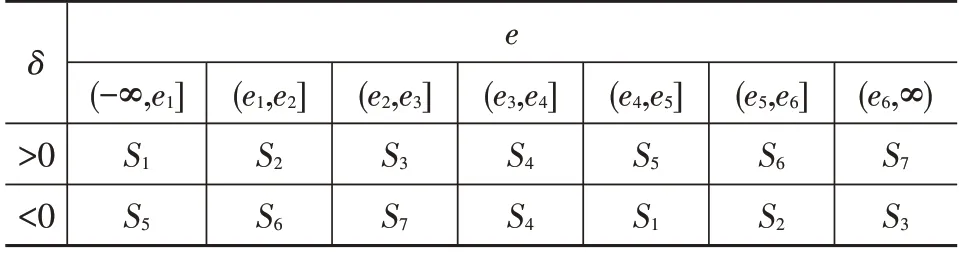
表1 轉向狀態分類
基于流挖掘技術及馬爾可夫模型的預測算法預測下一時刻的轉向狀態,構建的動態轉移概率矩陣P(t)為:
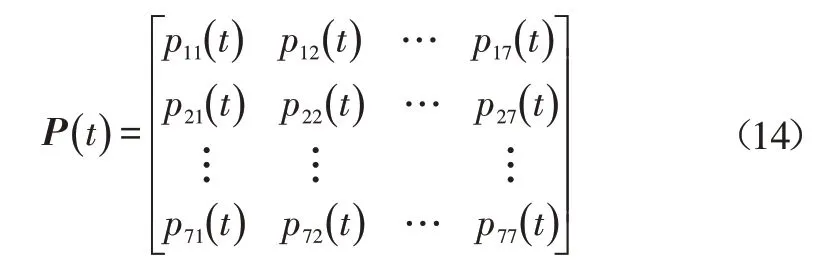
式中,pij(t)(i,j=1,2,3,…,7)為t時刻的狀態轉移概率。
車載處理器每次采集1個新樣本,過期的樣本自動剔除,保證緩存區的樣本數據容量恒定,實時更新狀態轉移概率矩陣。滑動時間窗口根據預測誤差實時調整大小,避免無效數據及外界噪聲的干擾,預測值更接近實際值。
前輪轉角同樣影響車輛的行駛狀態,前輪轉角預測與轉向狀態預測過程相同。對前輪轉角進行合理分類,本文設定狀態量為Zi(i=1,2,…,7),分別代表負大、負中、負小、零、正小、正中、正大,如表2所示。設定相對應的前輪轉向角閥值q1~q8,將前輪轉角預測值與對應時刻的轉向狀態Si實時輸入給附加橫擺力矩決策層,進行橫擺力矩修正。
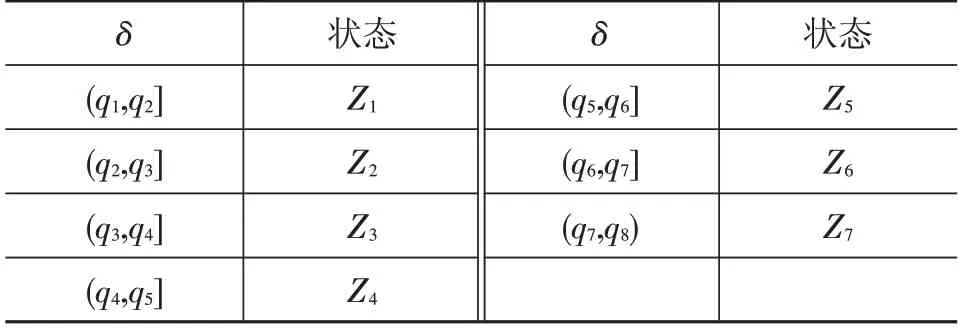
表2 前輪轉向角分類
3.4 基于模糊控制的附加橫擺力矩決策
該模糊控制器以未來時刻前輪轉角δ'及車輛轉向狀態S為控制輸入,以附加橫擺力矩控制律U為輸出,定義δ'、S和U的模糊子集為:{NB(負大),NM(負中),NS(負小),ZE(零),PS(正小),PM(正中),PB(正大)}。
模糊控制規則是模糊控制器的核心,它的正確與否直接影響到控制器的性能。當預測到車輛將要進入較大的不足轉向或過多轉向狀態時,控制器提前施加較大的控制量,反之則減小控制量或不干涉,通過模糊輸出轉換為實際的控制輸出,得到附加橫擺力矩ΔMz。根據試驗結果反復試湊,最終確定的模糊控制規則如表3所示。
3.5 驅動力矩分配
根據上、中層控制器的計算結果,得到總期望橫擺力矩Mz=Mz1+ΔMz。下層控制器基于直接橫擺力矩控制實現各驅動輪轉矩的合理分配,以達到車輛穩定行駛的目的。
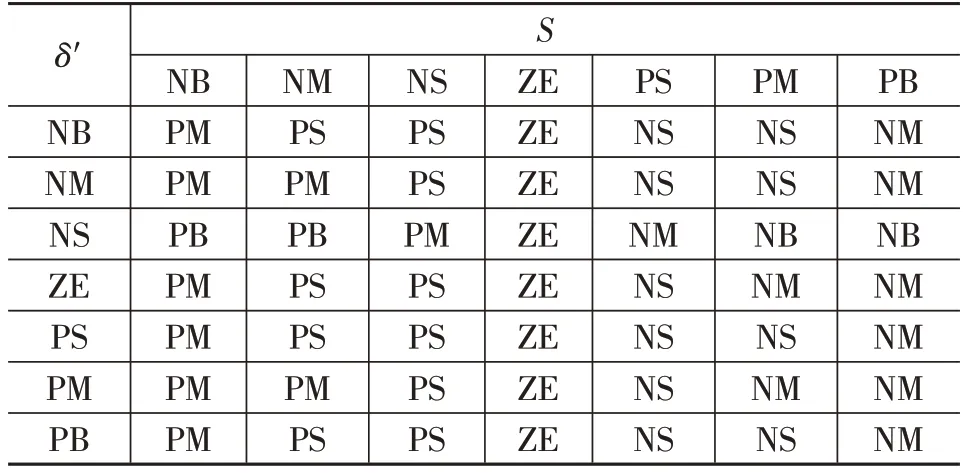
表3 模糊控制規則
分布式驅動電動汽車穩定行駛時整車驅動轉矩為:

式中,Tt為整車總驅動力矩;T1~T4分別為左前輪、右前輪、左后輪、右后輪的驅動力矩。
考慮到前輪轉角很小,δ≈0,假設前、后輪距相等,根據期望橫擺力矩進行各車輪驅動轉矩的合理分配,滿足:

式中,R為車輪半徑。
考慮到車輛行駛過程中前、后軸載荷的變化,對前、后軸載荷進行估算:
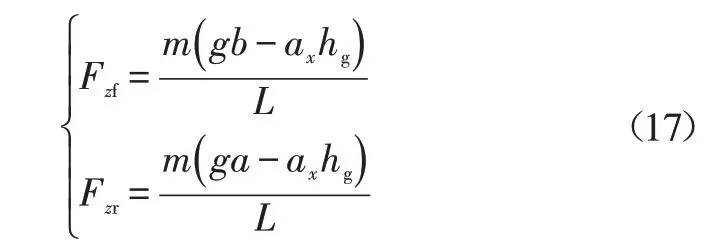
式中,Fzf、Fzr分別為前、后軸載荷;ax為車輛縱向加速度;hg為整車質心高度。
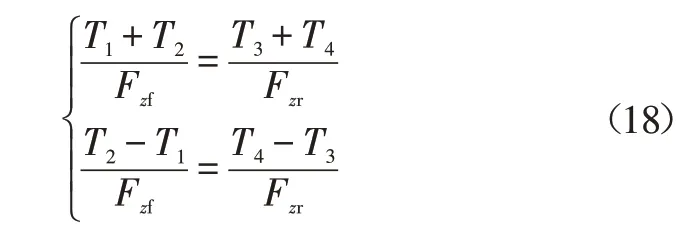
根據車輛前、后軸載荷對車輛驅動轉矩進行分配:
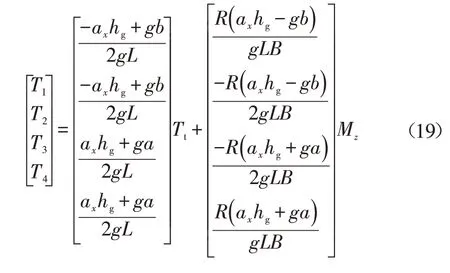
聯立式(15)~式(18)可求得各車輪驅動力矩狀態空間方程為:
4 仿真分析
基于MATLAB/Simulink構建分層控制器,整車動力學仿真模型由CarSim軟件提供,對有、無基于流挖掘轉向狀態預測的穩定性控制器進行對比分析。雙移線工況試驗常用于汽車行駛穩定性評價,考慮到駕駛員行為與車輛控制器之間存在一定的時間延遲,本文采用一階滯后環節在整車仿真模型中模擬執行機構的時間延遲過程:

為驗證基于馬爾可夫模型及流挖掘技術的轉向狀態預測算法的準確性,選擇雙移線工況進行仿真,設置路面附著系數μ為0.75,車速恒定為100 km/h。針對無控制策略的車輛模型,實時采集行駛過程中期望橫擺角速度與實際橫擺角速度樣本數據,通過所提出的預測算法進行未來時刻轉向狀態預測。本文的采樣間隔設定為0.01 s,為了便于在坐標系中顯示,避免數據過于密集,每10個采樣點取1個值,預測狀態與實際狀態的對比結果如圖3所示。預測值與實際值除在個別時間點有差距外,大部分時刻預測效果比較理想。
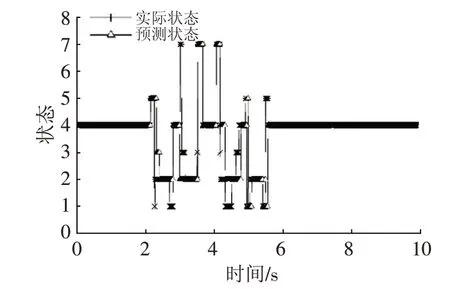
圖3 轉向狀態預測
圖4所示為在雙移線工況下無穩定性控制、傳統滑模控制及施加轉向狀態預測控制3種情況下跟隨期望軌跡的能力。由圖4可知,在車速設定為100 km/h的極限工況下,基于預測控制與僅有滑模控制(無預測控制)的分布式驅動電動汽車仍能很好地跟隨期望行駛軌跡,且與無穩定性控制的車輛相比,更有效避免橫向失穩。
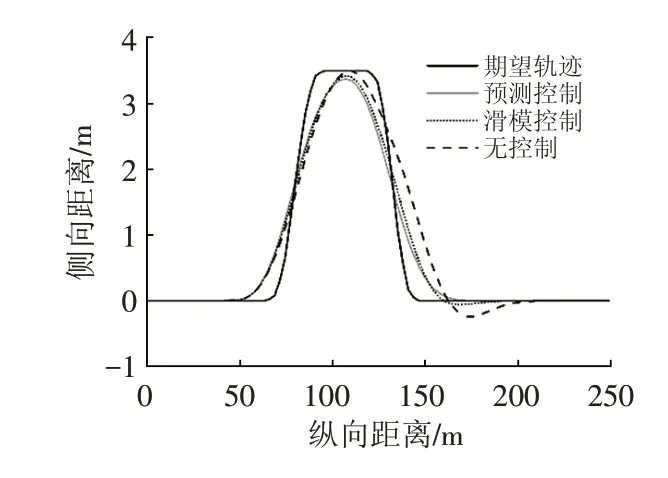
圖4 雙移線行駛軌跡跟隨情況
圖5所示為在雙移線工況下施加轉向狀態預測控制和傳統滑模控制對期望車速的跟隨能力。由圖5可知,兩種控制策略均能使車輛保持期望的行駛速度,但前者的跟隨效果更好,車速波動幅度較小,有利于駕駛舒適性及主動安全性。
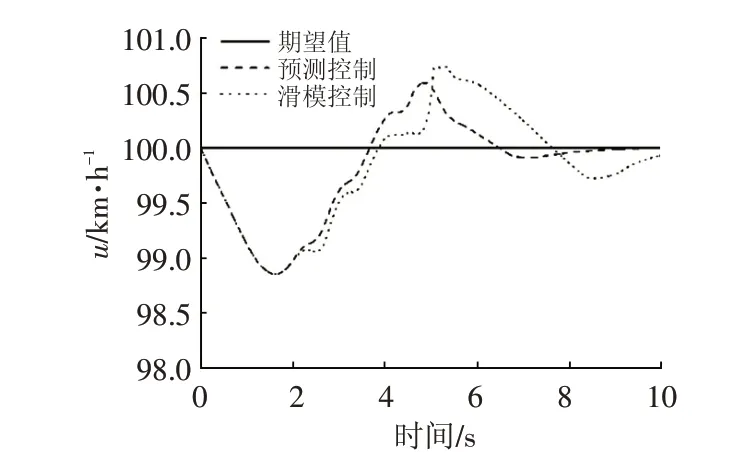
圖5 縱向車速跟隨對比
圖6、圖7所示為施加轉向狀態預測控制、僅有滑模控制和無穩定性控制策略的分布式驅動電動汽車跟隨期望橫擺角速度和期望質心側偏角的對比結果。由圖6、圖7可知,無穩定性控制時,實際橫擺角速度和質心側偏角均出現滯后現象,存在轉向失穩的隱患,且偏離期望值較大。施加預測控制與滑模控制均能達到橫向穩定性控制的目的,前者跟隨期望橫擺角速度和質心側偏角的效果更好,且有效解決了極限工況下駕駛員反應不及時而引起橫向失穩的問題。
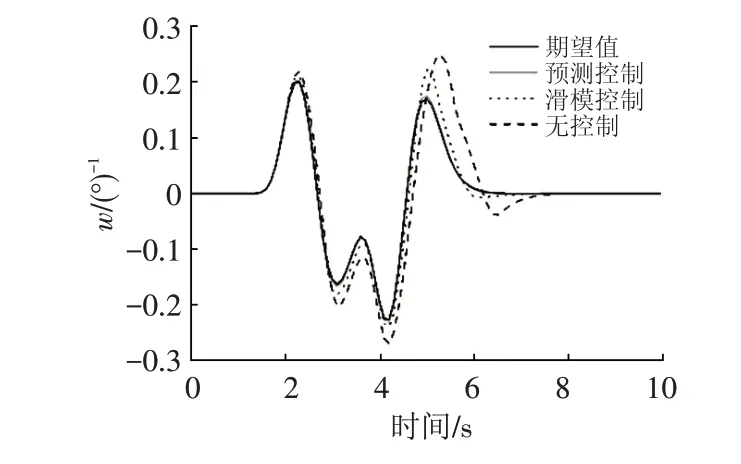
圖6 橫擺角速度對比
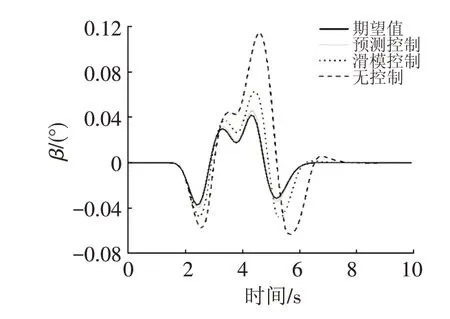
圖7 質心側偏角對比
2種控制策略下驅動力分配情況如圖8所示,由圖8可知,相比于僅有滑模控制,施加轉向狀態預測的控制器可提前決策出下一時刻的附加橫擺力矩需求,從而合理分配各輪驅動力矩,使電機輸出轉矩變化更加平滑,避免力矩頻繁振蕩的情況發生,從而提高行駛穩定性及駕駛舒適性。
5 結束語
針對高速工況下緊急轉向時,分布式驅動電動汽車產生的橫擺角速度滯后于駕駛員的轉向操作,導致車輛發生不足轉向或過多轉向,引起車輛橫向失穩的問題,本文提出基于流挖掘技術的轉向狀態預測控制方法對整車穩定性控制策略進行了優化。基于分層控制方法,根據預測的下一時刻轉向狀態,提前修正橫擺力矩需求,從而合理分配各車輪驅動力矩,避免由于駕駛員反應不及時,導致車輛進入不足轉向或過多轉向狀態,有效提高了車輛行駛穩定性。將流挖掘技術應用于車輛控制器節省存儲臨時數據的內存空間的同時,有利于實時更新控制策略,對提高橫向穩定性效果更明顯,為提高整車主動安全性提供了新方法。
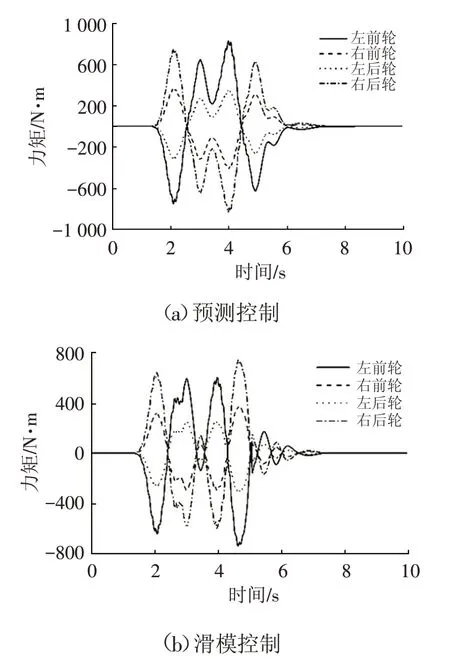
圖8 2種控制策略下驅動力分配情況