多高超聲速導彈協同末制導律及可行初始位置域研究
2020-01-10 01:02:12李東旭王曉芳
彈道學報 2019年4期
李東旭,王曉芳,林 海
(北京理工大學 宇航學院,北京 100081)
高超聲速導彈因其飛行速度快、作戰范圍廣等特點在近年來成為研究熱點。與此同時,美國正在研制和部署全球一體化反導系統,單一高超聲速導彈的突防能力受到嚴峻考驗,多高超聲速導彈通過各彈之間的戰術、火力相互支援和協調,形成有掩護的攻擊,更加符合未來戰場的作戰需要,是提升協同突防能力和攻擊能力的有效手段[1]。因此對多高超聲速導彈協同作戰問題進行深入研究具有十分重要的意義。
高超聲速導彈協同末制導技術是其協同作戰的核心關鍵技術。關于協同末制導律,目前針對常速飛行的戰術導彈的研究比較多,根據彈間是否存在通訊,可以分為具有指定攻擊時間約束的末制導律[2-7]與存在彈間通訊的協同末制導律[8-9]。但高超聲速導彈具有飛行速度時變且不可控的特點[10-15],文獻[2-9]的方法并不適用。文獻[11]針對速度非定常的導彈,將攻擊時間控制問題轉化為導彈實際剩余航程對標稱剩余航程的跟蹤問題,提出了2種分別滿足攻擊時間約束、攻擊時間與攻擊角度約束的導引律,但其只適用于導彈在二維平面內運動的情況。針對導彈在三維空間運動的情況,文獻[12]提出了一種基于彈目距離的協同策略,根據當前時刻的速度及彈目距離計算側向速度前置角,從而控制導彈側向機動,實現了多高超聲速導彈對目標的協同打擊。文獻[13]基于每個時刻的狀態在線對剩余飛行時間進行估計,將其與給定攻擊時間的誤差作為反饋,實現對攻擊時間的控制。為了提高對目標的攻擊效能,通常對攻擊落角有限制,而文獻[12-13]只考慮了攻擊時間的約束,并沒考慮攻擊角度的約束。另外,由于各導彈的速度、機動性都是有限的,因此,其并不是從任何位置開始末制導都可以實現協同攻擊的,此時,需對導彈可行的末制導初始位置域進行研究,而上述文獻均沒有涉及這一點,故而針對多高超聲速導彈協同作戰問題,設計能夠同時滿足攻擊時間和攻擊角度約束的三維協同制導律以及對各導彈的可行末制導初始位置域進行研究是非常重要和必要的。
本文考慮高超聲速導彈速度時變且不可控的特點,在文獻[13]的基礎上進行進一步研究,通過縱向制導指令控制落角、側向制導指令控制攻擊時間,從而得到同時滿足落角與攻擊時間約束的協同末制導律。在此基礎上,考慮各導彈的機動能力、末端速度約束,給出計算其攻擊時間范圍的方法和一維、二維可行末制導初始位置域的求解方法。最后通過仿真驗證了協同末制導律的良好性能與可行域求解方法的有效性。
1 問題描述
在末制導段,假設導彈攻擊靜止目標,其在三維空間的相對運動關系如圖1所示。
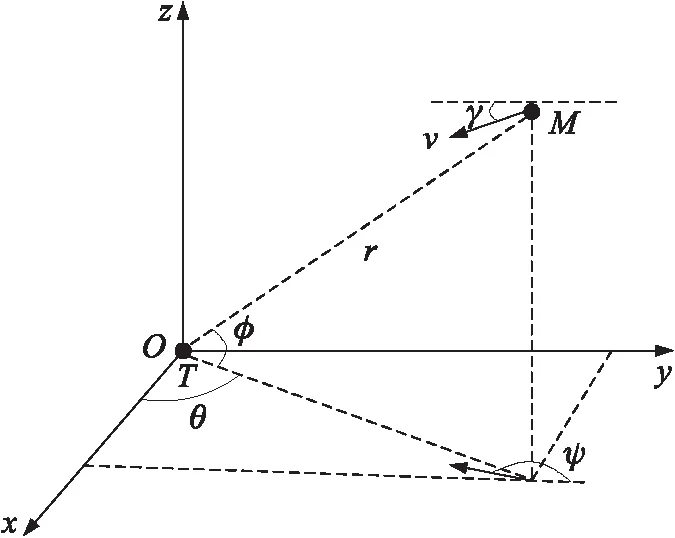
圖1 導彈目標相對運動關系圖
圖1中,Oxyz為地面坐標系,M和T分別代表導彈和目標,r為彈目距離,φ和θ分別為俯仰、偏航方向視線角,圖示方向為正。v、γ和ψ分別為導彈速度、彈道傾角和彈道偏角,圖示γ方向為正,ψ方向為負。由圖1可得彈目相對運動的方程組為
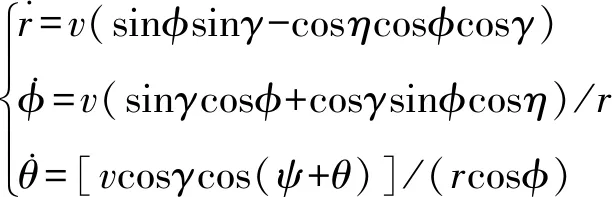
(1)
式中:η=θ+ψ+(π/2)為偏航方向速度前置角。
表征導彈運動非線性傾斜轉彎模型[13]為
(2)
式中:FL、FD分別為導彈的升力與阻力,m為導彈質量,g為重力加速度,σ為導彈的傾側角,由于采用BTT-90模式,有-90°≤σ≤90°,(x,y,z)為導彈位置。
多導彈要想在指定的時間td以指定的落角γ*對目標進行飽和攻擊,須滿足:
(x(td)y(td)z(td)γ(td))T=(0 0 0γ*)T
2 三維協同末制導律設計
高超聲速導彈的速度時變且不可控,給多導彈協同末制導律的設計帶來很大挑戰。文獻[13]通過預測值計算剩余飛行時間,將其與給定剩余攻擊時間的差作為反饋得到制導指令,實現攻擊時間控制。本文在此基礎上,考慮攻擊角度的約束,給出了能夠同時實現攻擊時間和攻擊角度約束的末制導律。
對于高超聲速導彈來講,其剩余飛行時間的高精度估計是一個難題,采用數值計算的方法對其進行在線估計。具體過程為:


②為了得到剩余飛行時間預測值,建立性能指標函數為
(3)
采用梯度下降法[13]對式(3)所示的無約束優化問題進行求解,得到:
(4)
(5)
基于式(5)可對剩余飛行時間在線估計。
(6)
式中:γ*為理想落角,N1為比例系數,K>0為制導參數。則導彈在預測時采用三維制導律表達式為
(7)
不同于文獻[13]中通過縱向彈道的調整實現攻擊時間約束,本文通過在側向制導指令中加入理想攻擊時間與預測攻擊時間的誤差作為反饋項實現對攻擊時間的控制,而在縱向采用式(6)所示的偏置比例導引律實現對攻擊落角的控制。
考慮攻擊時間約束,令攻擊時間誤差[13]:
(8)
式中:tr是為使導彈的指令較平滑而設計的理想攻擊時間函數,其表達式為[13]
式中:t0為基于導彈初始狀態采用常規比例導引律的攻擊時間,tp為控制t0到td變化速度的時間參數。大量實證研究表明:令tp=2td/3可以消耗較小的控制能量[13]。
將式(8)所示的時間誤差作為反饋項引入側向比例導引律指令,有:
式中:N2為比例系數,ku為設計參數。則側向攻擊時間控制思路為:在每個制導周期,基于式(7)制導律對剩余飛行時間進行預測,將計算得到剩余飛行時間與理想剩余飛行時間的差et作為反饋項引入側向制導,側向制導指令作用于彈體,在下一制導周期,基于新的導彈位置、速度等狀態再采用式(7)制導律對剩余飛行時間進行預測,同時繼續通過et對導彈進行控制,如此進行,直至最終實現在理想攻擊時間擊中目標。
故而三維空間的同時具有攻擊時間和攻擊角度約束的制導律為
(9)
在Matlab環境中調用fmincon函數尋優得到攻角指令,有:
αd=arg min|FL-FLd|

在本文中,假設實際攻角與傾側角能夠完全跟蹤攻角指令與傾側角指令,即:
3 末制導可行初始位置域研究
由于各導彈的機動能力有限,且通常對其末速有要求,因此,其并不是從任何位置開始末制導都能同時擊中目標,實現協同,有必要在考慮導彈有限機動能力和末速約束的前提下研究各自在不同協同攻擊時間對應的末制導可行初始位置域。當導彈滑翔至z0=h0的高度時轉入末制導,且假設導彈初始速度大小和方向已確定。接下來選定合適的理想攻擊時間,再在y=y0的前提下求解理想攻擊時間對應的x方向一維可行位置域;最后求解x,y方向二維可行位置域。
3.1 攻擊時間范圍求解
當目標信息和末制導初期導彈的位置及速度已確定時,受可用過載和末速的約束,導彈能夠實現的飛行時間是有限的,即存在最小攻擊時間和最大攻擊時間。
由于高超聲速導彈速度時變且不可控,其攻擊時間范圍[tmin,tmax]無法采用解析方法進行求解,因此本文采用數值計算方法。當導彈采用式(7)所示帶落角約束的三維比例導引律時,其攻擊時間t0為最小攻擊時間,即tmin=t0。在最小時間的基礎上,令td=t0+iΔt(i=1,2,…,Δt為時間間隔)。從i=1開始計算td,此時通過仿真判斷導彈采用式(9)所示的協同末制導律時是否滿足可用過載n≤nmax及末速約束vf≥vfmin,如滿足,則增加i,從而增大td進行再次仿真;如不滿足,則輸出上一步滿足約束的td作為最大攻擊時間tmax。由以上方法可求得在某個末制導初始位置下導彈的攻擊時間范圍。
3.2 一維可行位置域求解
首先求解一維可行位置域。假定導彈末制導初始位置y0、z0確定,選取合理的理想協同攻擊時間td1,求解能以td1實現協同的x0的精確范圍,即一維可行初始位置域。
研究導彈位于不同末制導初始位置時的協同可行性。假設兩枚導彈A、B分別位于M1(x01A,y0,z0)和M2(x01B,y0,z0),且0
綜上所述,對一維可行位置域的求解可以轉化為求解最大攻擊時間等于td1的x01A與最小攻擊時間等于td1的x01B。以導彈x方向初始位置x0為設計變量,即:
X=x0
(10)
考慮導彈的可用過載與末速約束有:
(11)
式中:nmax為可用過載,vfmin為最小末速。
導彈實現協同的條件為以相同攻擊時間td1擊中目標,則性能指標函數可設為
minF1(X)=|t1-td1|
(12)
式中:t1為實際飛行時間。
式(10)~式(12)構成了優化模型,采用優化算法對其求解。在每次優化過程中,計算設計變量對應的攻擊時間范圍[t1jmin,t1jmax](j=1,2,…,p),令性能指標函數中t1=t1jmin,則優化計算得到x01max;令t1=t1jmax,則優化計算得到x01min。此時得到攻擊時間td1所對應的一維末制導可行初始位置域[x01min,x01max]。改變期望協同攻擊時間td1,可分別計算其對應的初始位置域。
3.3 二維可行位置域求解
仍然假設末制導初始時刻導彈的飛行高度z0=h0確定。考慮導引頭的作用距離、開始末制導時的高度、導彈側向機動能力等因素,設定x方向的初始位置范圍[x02min,x02max],在此基礎上,將二維可行域的求解問題轉化為一維可行域的求解,即取x02k∈[x02min,x02max](k=1,2,…,q),基于3.2節的方法可求解導彈的初始x0=x02k,z0=h0時,對應于理想攻擊時間td2的y方向坐標范圍[y02kmin,y02kmax]。考慮在整個[x02min,x02max]范圍內對應的[y02kmin,y02kmax],則可獲得二維末制導可行初始位置域。
4 仿真與分析
4.1 協同末制導律性能分析
假設目標位于原點,導彈A和B的初始位置為M1(x0A,y0A,z0A)=(25 km,5 km,20 km),M2(x0B,y0B,z0B)=(28 km,-10 km,20 km)。兩枚彈的初始速度均為v0=1 600 m/s,初始彈道傾角均為γ0=-10°,初始彈道偏角均為ψ0=-80°。升力系數CL和阻力系數CD[13]為
導彈的質量m=1 600 kg,參考面積S=0.502 6 m2。攻角允許范圍為[-15°,15°]。式(7)、式(9)制導律中的N1=N2=3,κ=8×10-6,ku=10,K=-1.5。理想攻擊時間td=30 s,理想落角γ*=-80°。仿真結果如圖2~圖7所示。


圖2 兩枚導彈彈道曲線

圖3 兩枚導彈彈道傾角變化曲線
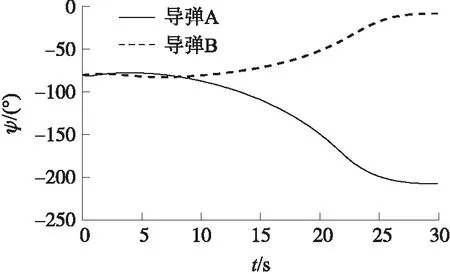
圖4 兩枚導彈彈道偏角變化曲線
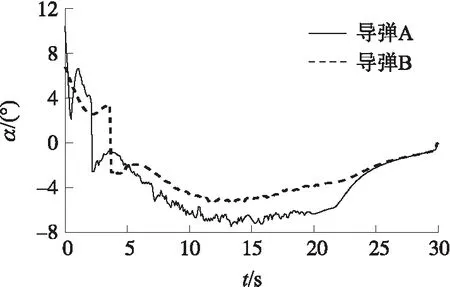
圖5 兩枚導彈攻角變化曲線
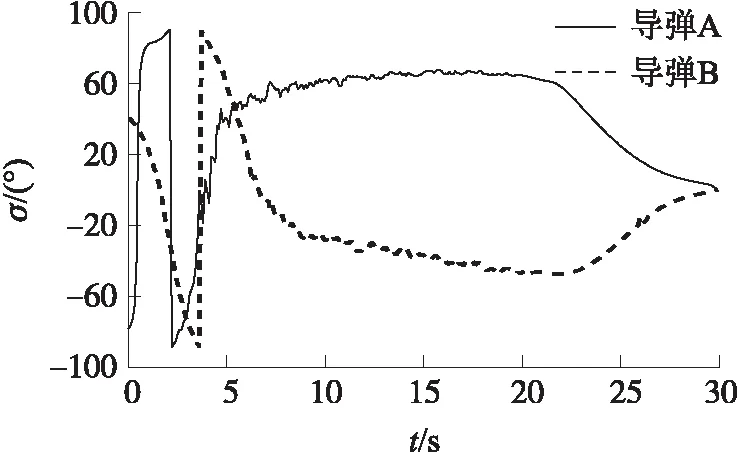
圖6 兩枚導彈傾側角變化曲線
圖7 兩枚導彈et變化曲線
4.2 一維可行域仿真及分析
假設高超聲速導彈滑翔至h0=20 km時轉入末制導,令初始側向坐標y0=0,分別設導彈C與導彈D的初始速度為v0C=1 600 m/s與v0D=1 500 m/s。其他初始條件與4.1中相同。為了研究方便,令理想攻擊時間td1在[26 s,34 s]中每隔1 s取值。約束條件:vfmin==700 m/s,nmax=30。優化結果如表1與圖8所示。
表1 一維協同可行初始位置域
圖8 兩枚導彈一維可行初始位置域
由表1與圖8可知,對應不同理想攻擊時間,2個導彈均具有各自的可行初始位置域。由表1可知,由于導彈C的初速大于導彈D的初速,因此有x01Cmin>x01Dmin,x01Cmax>x01Dmax。由于導彈D初始速度較小,但其也必須滿足末速要求,因此其初始位置域較小,如當td1=30 s時,導彈C可行位置域范圍為8.065 km,導彈D只有7.721 km。另一方面,理想攻擊時間越大,導彈可調整的范圍越大,其可行初始位置域越大。
4.3 二維可行位置域仿真及分析
以導彈C為例,求解其二維可行位置域。同樣假設其在高度為20 km處轉入末制導。參考4.2節中求得的一維可行位置域,同時為了計算方便,設導彈C在x方向的初始坐標x02C∈[x02Cmin,x02Cmax]=[20 km,30 km]。令x02C在[x02Cmin,x02Cmax]中每隔1 km取值,其他初始條件與4.2中相同,求對應的側向坐標范圍。設定理想攻擊時間td2分別為28 s、30 s和32 s,得到二維可行位置域如圖9所示。
圖9 不同td2時的二維可行初始位置域
當td2=28 s時,由表1可知,在y01C=0前提下,x01C范圍為[20.986 km,28.564 km],當沒有y02C=0的約束,求取二維可行初始位置域時,在20 km≤x02C<20.986 km也存在可行位置域,但是由圖9可知此時可行的y02C是不連續的。較小的x02C對應的可行|y02C|較大,隨著x02C的減小,可行y02C的范圍減小,這是因為小的x02C和大的|y02C|對應著相差不大的初始距離,才有可能實現同一攻擊時間。當20.986 km≤x02C≤28.564 km時,其對應著連續可行y02C,隨著x02C的增大,可行y02C的范圍減小,同樣是因為相差不大的初始彈目距離才有可能達到相同的攻擊時間。而當x02C>28.564 km時,初始彈目距離較大,導彈不做機動時的攻擊時間已經大于理想攻擊時間,故而無可行初始位置域。當td2=30 s和32 s時,與上述分析類似。
由表1可見,td2=28 s,30 s和32 s時,其一維可行初始位置域的交集為[25.197 km,28.564 km],在此范圍內,同一x02C對應的y02C范圍越大,這是因為理想攻擊時間長,給導彈進行調節的時間和余地就大,因此,其可行初始位置域也大。
5 結束語
本文針對速度時變且不可控的多高超聲速導彈,研究了能夠使其在指定的時間以指定的落角對目標進行協同打擊的三維末制導律。基于此末制導律,考慮多導彈各自的末制導初始速度大小及方向、可用過載約束和末速約束,提出了可實現協同飛行的各導彈的一維和二維的末制導可行初始位置域求解方法,并通過仿真進行了分析。相對于前人所做的工作,本文的貢獻在于:
①針對高超聲速導彈,基于縱向指令控制落角、側向指令控制攻擊時間的思路,對文獻[13]進行改進,提出了同時具有攻擊時間和攻擊角度約束的三維協同末制導律。
②考慮各導彈的末制導初始速度大小及方向、機動能力和末速要求,提出求解其一維和二維的末制導可行初始位置域的方法。
本文的方法適用于多同構或異構速度時變且不可控的導彈協同飛行的情況,具有廣闊的軍事應用前景。