航空發(fā)動(dòng)機(jī)排氣溫度測(cè)量通道故障智能檢測(cè)方法研究
2020-01-08 02:06:14
測(cè)控技術(shù) 2019年12期
(中國(guó)飛行試驗(yàn)研究院 發(fā)動(dòng)機(jī)所,陜西 西安 710089)
航空發(fā)動(dòng)機(jī)是一個(gè)復(fù)雜的氣動(dòng)機(jī)械系統(tǒng),由大量的靜止件、轉(zhuǎn)動(dòng)件、傳動(dòng)件組成。這些部件大多結(jié)構(gòu)復(fù)雜,且工作在高壓、高溫、高轉(zhuǎn)等惡劣工作環(huán)境下。作為飛機(jī)的心臟,航空發(fā)動(dòng)機(jī)的工作穩(wěn)定性、可靠性對(duì)飛機(jī)的整體性能和飛行安全至關(guān)重要。
為了解決因發(fā)動(dòng)機(jī)性能衰減和故障導(dǎo)致的飛機(jī)飛行性能衰減和災(zāi)難性故障,目前發(fā)動(dòng)機(jī)逐步向智能化方向發(fā)展。智能發(fā)動(dòng)機(jī)依靠傳感器數(shù)據(jù)、專家模型和二者的融合,可全面了解發(fā)動(dòng)機(jī)狀態(tài),實(shí)現(xiàn)發(fā)動(dòng)機(jī)狀態(tài)監(jiān)視和管理的自動(dòng)化、自動(dòng)診斷和自我預(yù)測(cè)。航空發(fā)動(dòng)機(jī)狀態(tài)監(jiān)視和故障診斷系統(tǒng)是智能發(fā)動(dòng)機(jī)的關(guān)鍵技術(shù)之一[1]。
航空發(fā)動(dòng)機(jī)飛行試驗(yàn)需要按照國(guó)家和行業(yè)標(biāo)準(zhǔn),在真實(shí)大氣環(huán)境和整體工況下對(duì)新研和改型發(fā)動(dòng)機(jī)、配套新飛機(jī)的成熟發(fā)動(dòng)機(jī)進(jìn)行試驗(yàn)。由于其工作穩(wěn)定性和可靠性還未完成充分驗(yàn)證,因此相比服役和運(yùn)行階段的發(fā)動(dòng)機(jī),其安全風(fēng)險(xiǎn)更大,更需要加強(qiáng)安全監(jiān)控,嚴(yán)格控制試驗(yàn)風(fēng)險(xiǎn)。
排氣溫度是表征航空發(fā)動(dòng)機(jī)健康狀態(tài)和決定發(fā)動(dòng)機(jī)可用性的重要參數(shù)[2-3],它對(duì)分析和控制發(fā)動(dòng)機(jī)工作性能和故障診斷,以及確保工作可靠性意義重大。通過(guò)排氣溫度,可以對(duì)航空發(fā)動(dòng)機(jī)工作異常、性能衰減、控制和監(jiān)視系統(tǒng)故障等進(jìn)行有效監(jiān)控。因此排氣溫度監(jiān)控對(duì)航空發(fā)動(dòng)機(jī)試飛安全監(jiān)控、被試發(fā)動(dòng)機(jī)和試驗(yàn)機(jī)技術(shù)狀態(tài)管理非常重要。
航空發(fā)動(dòng)機(jī)排氣溫度測(cè)量通道故障是指由于測(cè)量通道電纜因破損搭接異常、接頭電纜插頭松動(dòng)、測(cè)量通道元件失效等原因使得實(shí)測(cè)排氣溫度示值異常,但航空發(fā)動(dòng)機(jī)工作正常的故障[4-5]。這類故障是一種比較常見(jiàn)的航空發(fā)動(dòng)機(jī)測(cè)量系統(tǒng)故障。如果因?yàn)榕艢鉁囟葴y(cè)量通道故障,使得實(shí)測(cè)排氣溫度不能反映發(fā)動(dòng)機(jī)真實(shí)工作狀態(tài),則存在不能及時(shí)發(fā)現(xiàn)試驗(yàn)航空發(fā)動(dòng)機(jī)排氣溫度超溫、喘振、異常停車等故障征兆,確定發(fā)動(dòng)機(jī)工作是否正常的安全風(fēng)險(xiǎn),需要嚴(yán)格把控。
1 模糊邏輯與神經(jīng)網(wǎng)絡(luò)建模
1.1 模糊邏輯
模糊邏輯推理是建立在模糊邏輯基礎(chǔ)之上的,它是在二值邏輯三段論基礎(chǔ)上發(fā)展起來(lái)的一種不確定性推理方法,簡(jiǎn)稱為模糊推理,或模糊邏輯。這種方法以模糊判斷為前提,運(yùn)用模糊語(yǔ)言規(guī)則,推導(dǎo)出一個(gè)近似的模糊判斷結(jié)論。
模糊邏輯系統(tǒng)的一般結(jié)構(gòu)如圖1所示。
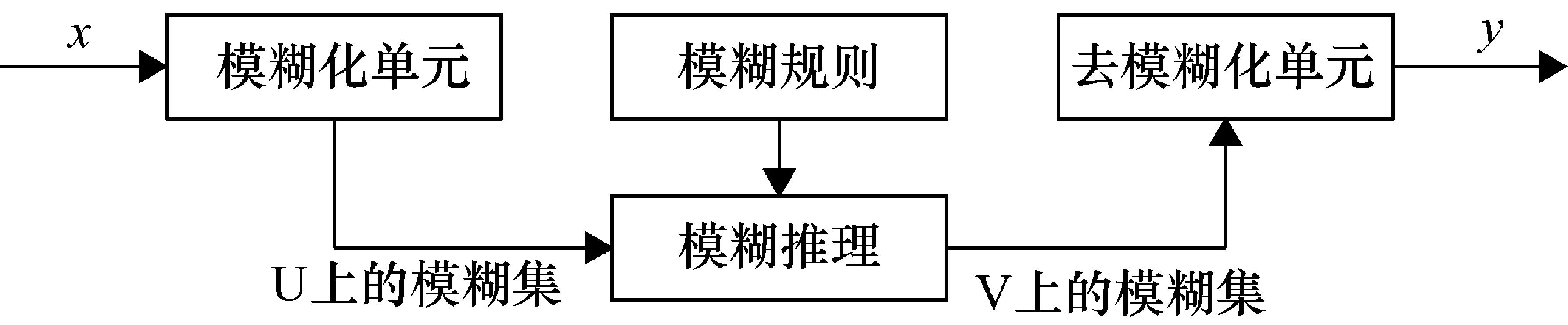
圖1 模糊邏輯系統(tǒng)的一般結(jié)構(gòu)
模糊邏輯系統(tǒng)實(shí)質(zhì)上是一個(gè)從論域U到論域V的非線性映射,一般由模糊化單元、模糊規(guī)則、模糊推理和反模糊化單元4個(gè)部分組成。模糊邏輯系統(tǒng)的處理對(duì)象是模糊信息,所以輸入信號(hào)x需要通過(guò)模糊化單元變換成U上的模糊集;模糊邏輯系統(tǒng)最終的輸出應(yīng)為明確的信息,所以需要由反模糊化單元將論域V上的模糊集轉(zhuǎn)化成確定信號(hào)y;模糊規(guī)則是模糊邏輯系統(tǒng)的核心部分,它由一組模糊推理規(guī)則組成,其基本形式為“if…then…”;模糊推理的作用是根據(jù)模糊規(guī)則,模擬人類基于模糊概念的推理過(guò)程,完成輸入模糊集和輸出模糊集之間的映射。
模糊邏輯被廣泛應(yīng)用于控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[6-7]、狀態(tài)監(jiān)視與故障診斷[8-9]、系統(tǒng)辨識(shí)和建模[10-11]等領(lǐng)域。在燃?xì)鉁u輪發(fā)動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)、故障診斷等方面,模糊推理/模糊邏輯也被普遍使用[10-12]。
1.2 神經(jīng)網(wǎng)絡(luò)建模
神經(jīng)網(wǎng)絡(luò)是由簡(jiǎn)單處理單元構(gòu)成的大規(guī)模并行分布式處理器,天然地具有存儲(chǔ)經(jīng)驗(yàn)知識(shí)和使之可用的特性。神經(jīng)網(wǎng)絡(luò)具有非線性、輸入輸出映射、自適應(yīng)性、證據(jù)響應(yīng)、上下文信息、容錯(cuò)性、VLSI實(shí)現(xiàn)、分析和設(shè)計(jì)一致性、神經(jīng)生物類比等特點(diǎn)。神經(jīng)網(wǎng)絡(luò)的應(yīng)用領(lǐng)域主要有:模式聯(lián)想、模式識(shí)別、函數(shù)逼近、控制等。
神經(jīng)元是人工神經(jīng)網(wǎng)絡(luò)的基本處理單元,它一般是一個(gè)多輸入/單輸出的非線性元件。如圖2所示為一般神經(jīng)元結(jié)構(gòu)示意圖,圖中pj(j=1,2,…,r)為輸入分量,r為輸入分量個(gè)數(shù);wi為權(quán)值;b為偏差(或閾值或門(mén)限值);∑表示對(duì)輸入分量與權(quán)值乘積和偏差求和;f(·)為激活函數(shù);a為輸出。
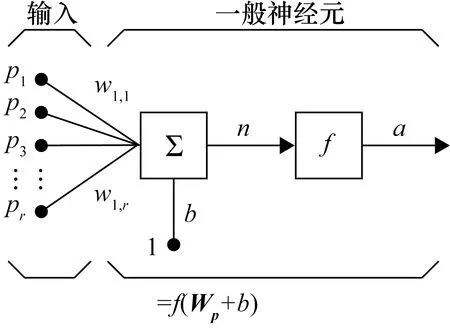
圖2 神經(jīng)元模型
BP(反向傳播)網(wǎng)絡(luò)是在多層感知器的基礎(chǔ)上發(fā)展而來(lái)的,是將W-H規(guī)則一般化,對(duì)線性可微分函數(shù)進(jìn)行權(quán)值訓(xùn)練的多層網(wǎng)絡(luò),其典型結(jié)構(gòu)如圖3所示。BP網(wǎng)絡(luò)的產(chǎn)生歸功于BP算法,該算法是一種監(jiān)督式的學(xué)習(xí)算法,其主要特點(diǎn)是信息的正向傳播和誤差的反向傳播,神經(jīng)網(wǎng)絡(luò)的權(quán)值和誤差的反向傳播是利用負(fù)梯度下降算法實(shí)現(xiàn)的。理論上,具有一個(gè)隱含層的BP神經(jīng)網(wǎng)絡(luò)可以逼近任意一個(gè)非線性系統(tǒng),實(shí)現(xiàn)輸入與輸出參數(shù)之間的非線性映射。
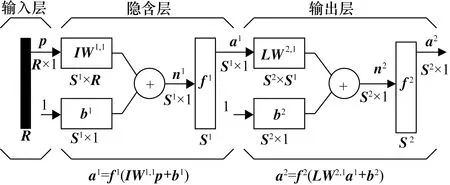
圖3 BP網(wǎng)絡(luò)結(jié)構(gòu)圖
一般來(lái)說(shuō),需要估計(jì)的參數(shù)模型按照其是否需要考慮輸入?yún)?shù)的動(dòng)態(tài)變化過(guò)程可分為兩類:一類是用當(dāng)前時(shí)刻的輸入?yún)?shù)估計(jì)當(dāng)前時(shí)刻的輸出參數(shù)的穩(wěn)態(tài)參數(shù)模型,如式(1)表示;另一類是用輸入?yún)?shù)的當(dāng)前時(shí)刻和當(dāng)前時(shí)刻之前的歷史數(shù)據(jù)估計(jì)當(dāng)前時(shí)刻的輸出參數(shù)的可表征系統(tǒng)動(dòng)態(tài)變化過(guò)程的全狀態(tài)參數(shù)模型,如式(2)所示。
z(n) =f(x(n),y(n))
(1)
z(n)=g(x(n),y(n),y(n-1),…y(n-K))
(2)
x(n) =[x1(n),x2(n),…,xM(n)]T
(3)
y(n) =[y1(n),y2(n),…,yP(n)]T
(4)
z(n) =[z1(n),z2(n),…,zQ(n)]T
(5)
要用神經(jīng)網(wǎng)絡(luò)構(gòu)建如式(1)和式(2)所示的參數(shù)模型,則需要采用不同的模型構(gòu)建方法[13-15]。式(1)采用一般的曲線擬合的方法就可以實(shí)現(xiàn),如圖4所示;式(2)則要采用系統(tǒng)識(shí)別的方法,如圖5所示。
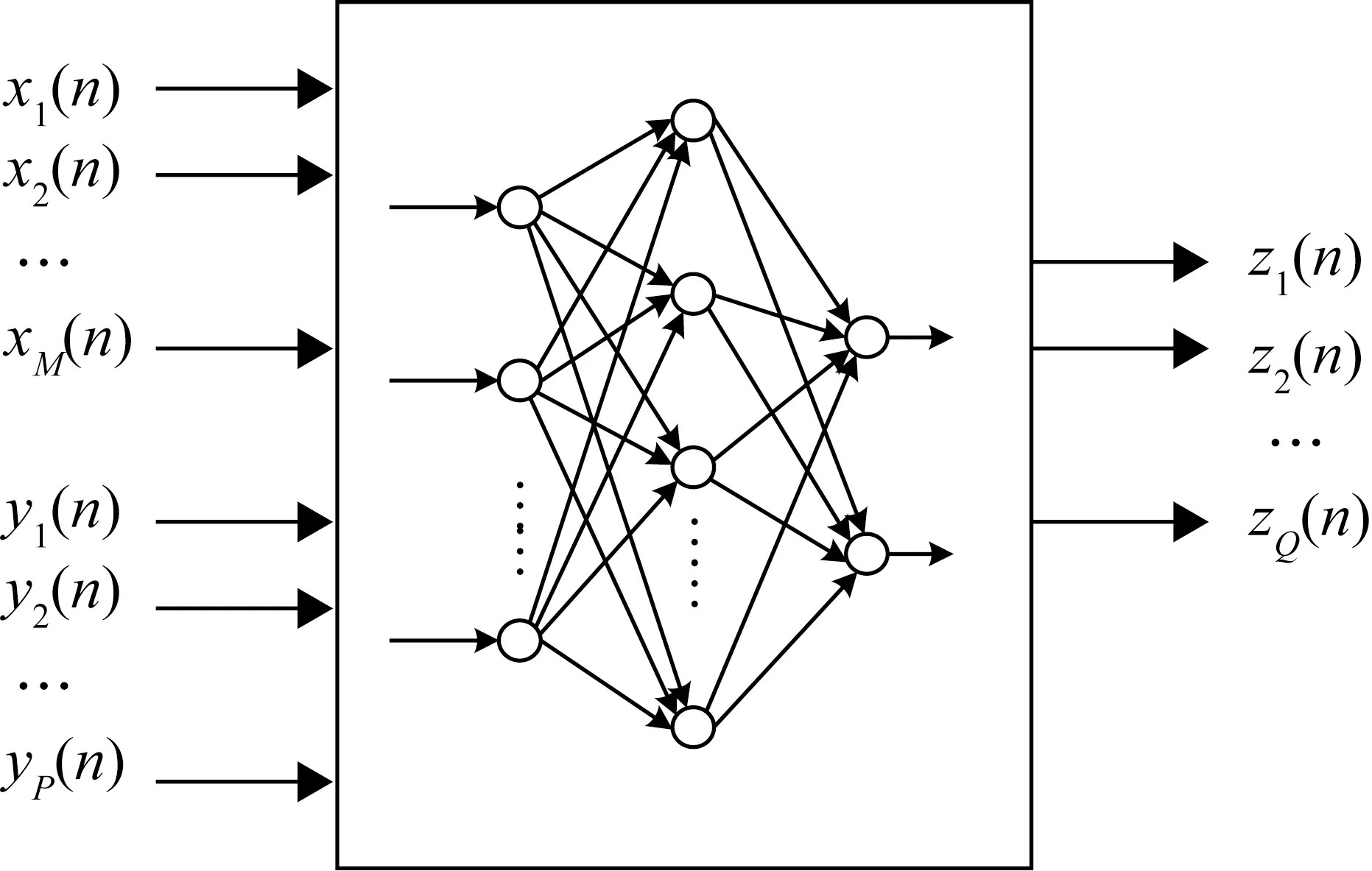
圖4 參數(shù)神經(jīng)網(wǎng)絡(luò)穩(wěn)態(tài)模型

圖5 參數(shù)神經(jīng)網(wǎng)絡(luò)全狀態(tài)模型
1.3 模糊邏輯與神經(jīng)網(wǎng)絡(luò)的融合
不難發(fā)現(xiàn),模糊系統(tǒng)和神經(jīng)網(wǎng)絡(luò)具有以下共通之處:均可以利用給定系統(tǒng)的輸入和輸出數(shù)據(jù),建立系統(tǒng)的非線性映射關(guān)系;從處理方式來(lái)看,兩者均采用并行處理的結(jié)構(gòu)。但是通過(guò)詳細(xì)對(duì)比還是可以發(fā)現(xiàn),神經(jīng)網(wǎng)絡(luò)和模糊系統(tǒng)也具有明顯的差異:神經(jīng)網(wǎng)絡(luò)具有較強(qiáng)的自學(xué)習(xí)能力,但從系統(tǒng)建模角度考慮,它是一個(gè)典型的黑箱型學(xué)習(xí)模式,其輸入和輸出關(guān)系很難用大家容易接受的方式表示出來(lái);模糊系統(tǒng)建立在大家很容易接受的“if… then…”規(guī)則集表述方式之上,但其不具備自學(xué)習(xí)能力,隸屬函數(shù)和模糊規(guī)則生成和調(diào)整往往要依賴于領(lǐng)域?qū)<摇R虼俗陨鲜兰o(jì)70年代中期開(kāi)始,如何將模糊理論和神經(jīng)網(wǎng)絡(luò)有機(jī)結(jié)合起來(lái),提高整個(gè)系統(tǒng)的學(xué)習(xí)能力和表達(dá)能力就成為了一個(gè)焦點(diǎn)問(wèn)題。
神經(jīng)網(wǎng)絡(luò)與模糊系統(tǒng)的融合大致可以分為以下幾種情況:
① 松散型方式,即對(duì)于系統(tǒng)適合用模糊規(guī)則表示的用模糊系統(tǒng)描述,適合用神經(jīng)網(wǎng)絡(luò)表示的用神經(jīng)網(wǎng)絡(luò)系統(tǒng)描述,兩者之間沒(méi)有直接聯(lián)系,如文獻(xiàn)[16];
② 以神經(jīng)網(wǎng)絡(luò)系統(tǒng)為主,模糊系統(tǒng)為輔的方式,即將常規(guī)神經(jīng)網(wǎng)絡(luò)的確定性輸入輸出參數(shù)用模糊變量代替,模糊推理過(guò)程用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn),如文獻(xiàn)[15];
③ 以模糊系統(tǒng)為主,神經(jīng)網(wǎng)絡(luò)為輔的方式,即利用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)必要的模糊系統(tǒng)輸入?yún)?shù)的前處理和輸出參數(shù)的后處理,如文獻(xiàn)[17];
④ 神經(jīng)網(wǎng)絡(luò)和模糊邏輯的全面融合方式,如文獻(xiàn)[18]。
本文主要參考第3種方式構(gòu)建排氣溫度測(cè)量通道故障檢測(cè)方法。
2 排氣溫度測(cè)量通道故障自動(dòng)檢測(cè)方法
排氣溫度測(cè)量通道故障的表現(xiàn)一般為:當(dāng)航空發(fā)動(dòng)機(jī)在特定狀態(tài)(例如爬升)穩(wěn)定工作時(shí),其主要參數(shù)(例如油門(mén)桿角度、高壓轉(zhuǎn)速、低壓轉(zhuǎn)速)示值正常,但排氣溫度示值明顯偏小或偏大,如圖6所示。
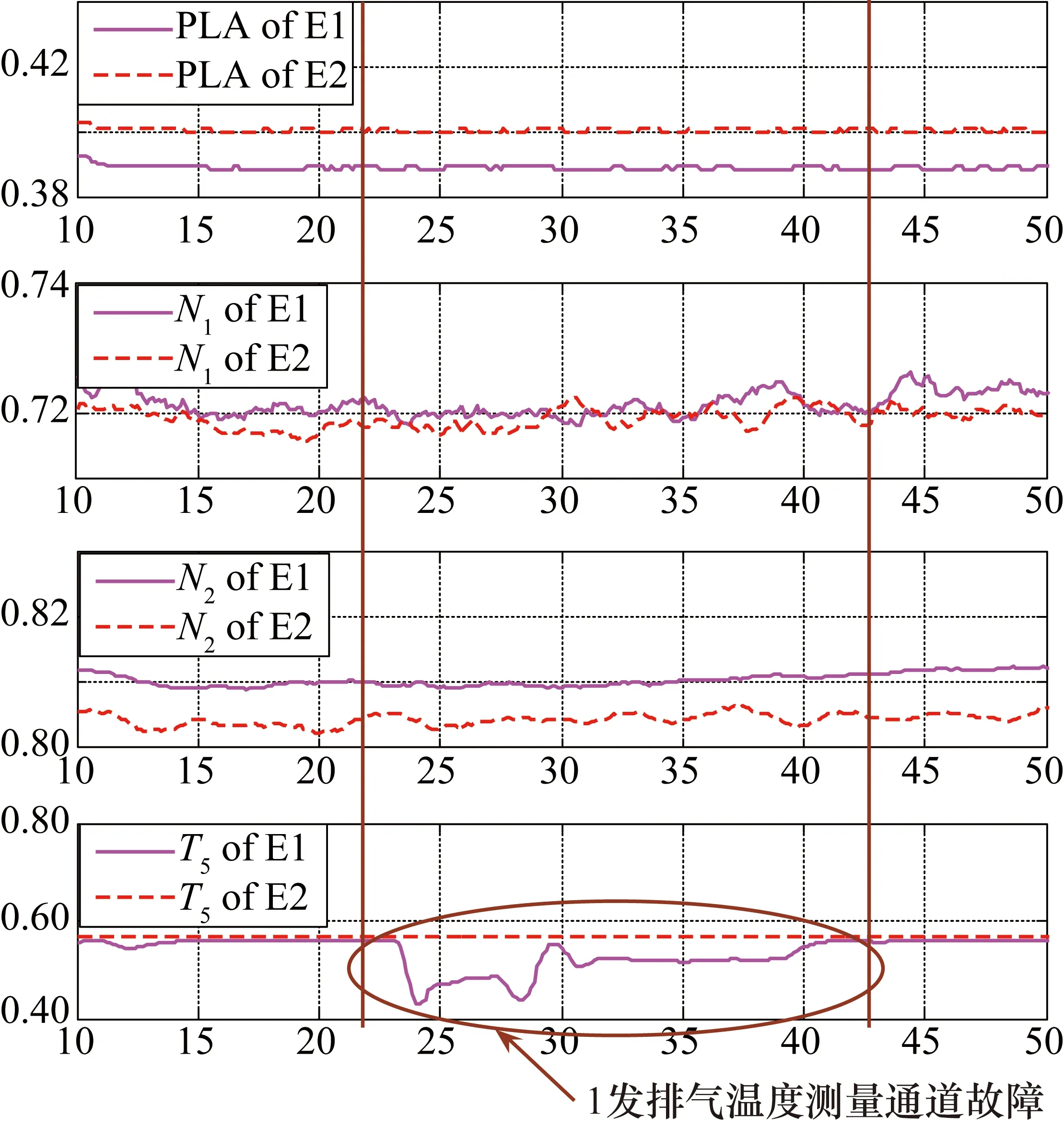
圖6 典型排氣溫度測(cè)量通道故障參數(shù)變化情況
需要特別說(shuō)明的是圖6中的所有參數(shù)均為歸一化處理后的數(shù)據(jù)。
從圖6可以看出,當(dāng)編號(hào)為1的試驗(yàn)發(fā)動(dòng)機(jī)在某個(gè)狀態(tài)穩(wěn)定工作時(shí),在油門(mén)桿Ф、高壓轉(zhuǎn)速n1、低壓轉(zhuǎn)速n2均沒(méi)有明顯的上升或下降的情況下,排氣溫度T5卻有一個(gè)非常明顯的大幅下降并回升至最初示值的過(guò)程。對(duì)比2發(fā)的T5,1發(fā)排氣溫度測(cè)量通道故障現(xiàn)象非常明顯。
針對(duì)前述排氣溫度測(cè)量通道故障的現(xiàn)象,考慮將模糊邏輯和神經(jīng)網(wǎng)絡(luò)建模技術(shù)融合起來(lái),實(shí)現(xiàn)對(duì)該類故障的實(shí)時(shí)自動(dòng)檢測(cè)(圖7)。
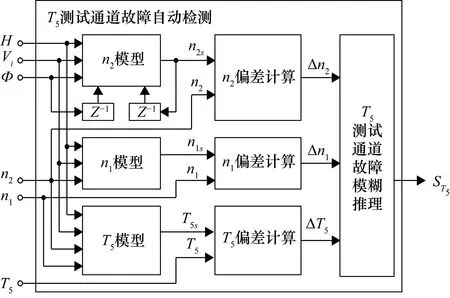
圖7 排氣溫度測(cè)量通道故障自動(dòng)檢測(cè)方法
如圖7所示,T5測(cè)試通道故障通過(guò)利用一個(gè)模糊推理系統(tǒng)實(shí)現(xiàn),其輸入?yún)?shù)為高壓轉(zhuǎn)速偏差Δn2、低壓轉(zhuǎn)速偏差Δn1和排氣溫度偏差ΔT5,輸出參數(shù)為表征T5測(cè)試通道故障狀態(tài)的離散變量ST5。
n2、n1、T5正常狀態(tài)輸出值n2s、n1s、T5s估計(jì)模型均采用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)。假設(shè)飛行狀態(tài)主要控制參數(shù)高度H、表速Vi,以及發(fā)動(dòng)機(jī)狀態(tài)主要控制參數(shù)油門(mén)桿角度Ф、高壓轉(zhuǎn)子轉(zhuǎn)速n2,均具有較高的控制精度,因此偏差估計(jì)值估計(jì)神經(jīng)網(wǎng)絡(luò)模型采用如圖5所示的具有一定記憶功能的、精度更高的、考慮了Ф和n2歷史反饋信息的神經(jīng)網(wǎng)絡(luò)模型實(shí)現(xiàn)。n1和T5采用圖4所示的一般神經(jīng)網(wǎng)絡(luò)參數(shù)估計(jì)模型實(shí)現(xiàn)。
3 故障自動(dòng)檢測(cè)方法驗(yàn)證
為了驗(yàn)證圖7所述發(fā)動(dòng)機(jī)排氣溫度測(cè)量通道故障自動(dòng)檢測(cè)方法的實(shí)施效果,本節(jié)以某發(fā)動(dòng)機(jī)試飛數(shù)據(jù)為基礎(chǔ),利用Matlab實(shí)現(xiàn)了檢測(cè)算法,并利用該發(fā)動(dòng)機(jī)某架次爬升階段的試飛數(shù)據(jù)對(duì)算法實(shí)施效果進(jìn)行了檢驗(yàn)。神經(jīng)網(wǎng)絡(luò)建模部分主要基于Matlab的神經(jīng)網(wǎng)絡(luò)工具箱實(shí)現(xiàn),檢測(cè)故障模糊推理過(guò)程主要基于Matlab的模糊邏輯工具箱實(shí)現(xiàn)。
如圖7所示,要實(shí)現(xiàn)發(fā)動(dòng)機(jī)排氣溫度測(cè)量通道故障自動(dòng)檢測(cè),首先需要建立高壓轉(zhuǎn)速n2、低壓轉(zhuǎn)速n1、排氣溫度T5的參數(shù)模型。綜合考慮某航空發(fā)動(dòng)機(jī)技術(shù)特點(diǎn)和控制邏輯,以及高度H、表速Vi、油門(mén)桿角度Ф、高壓轉(zhuǎn)速n2、低壓轉(zhuǎn)速n1等相關(guān)參數(shù)的精度和穩(wěn)定性等問(wèn)題,最終確定n2采用帶反饋的全狀態(tài)神經(jīng)網(wǎng)絡(luò)模型、n1和T5采用一般的穩(wěn)態(tài)神經(jīng)網(wǎng)絡(luò)模型,如圖8~圖10所示。神經(jīng)網(wǎng)絡(luò)模型輸入?yún)?shù)、輸出參數(shù)、隱含層層數(shù)、隱含層神經(jīng)元個(gè)數(shù)等參數(shù)見(jiàn)表1。
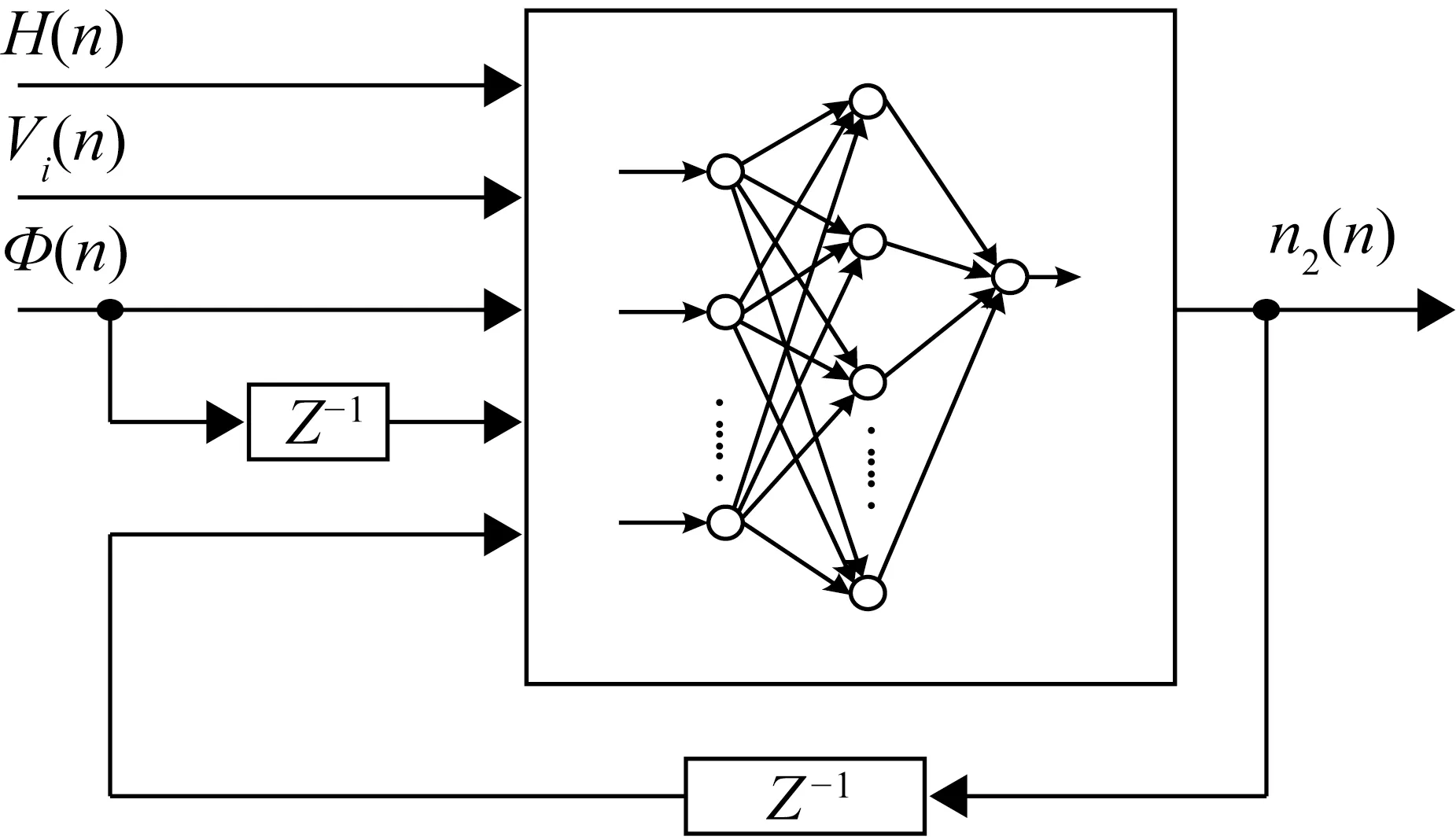
圖8 n2神經(jīng)網(wǎng)絡(luò)模型

圖9 n1神經(jīng)網(wǎng)絡(luò)模型
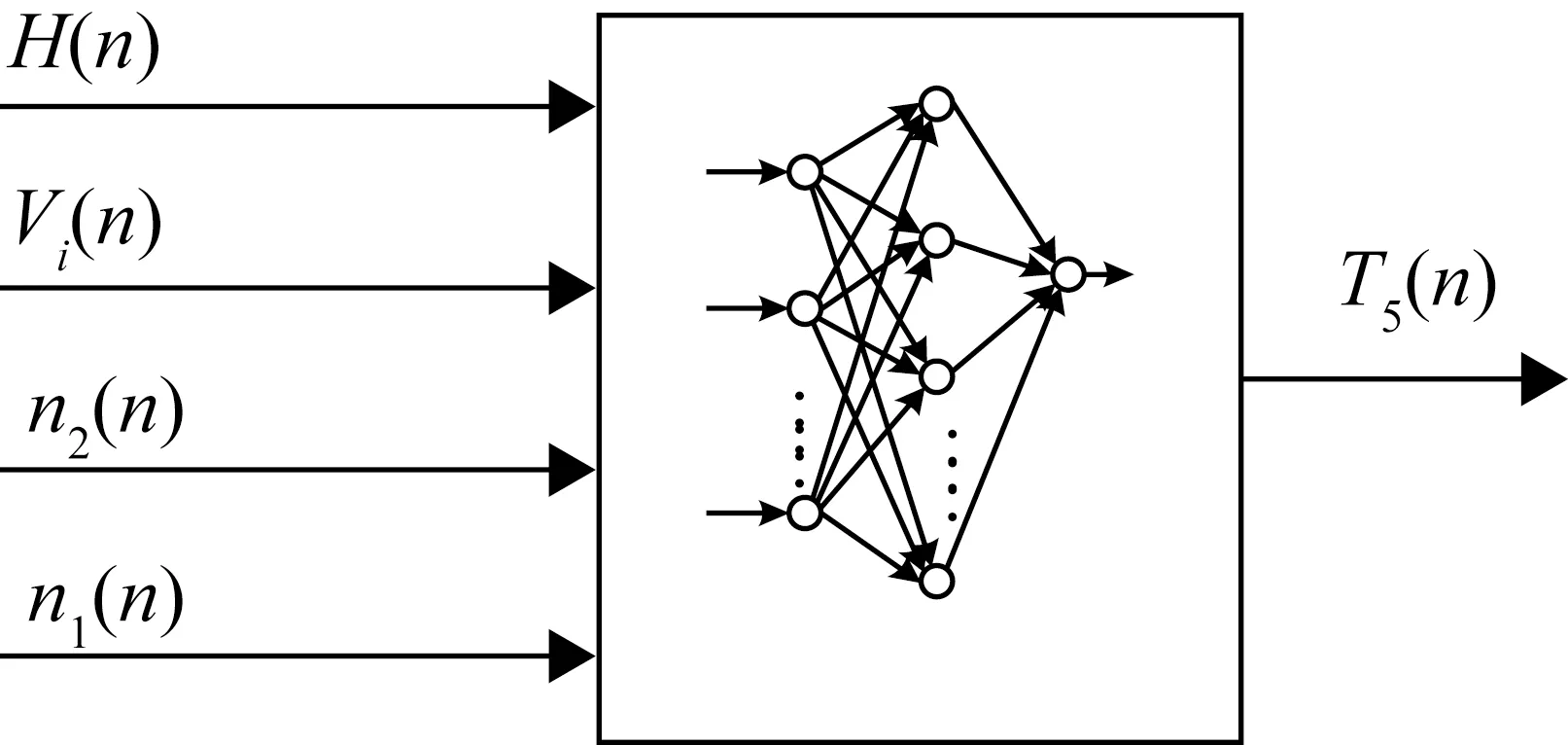
圖10 T5神經(jīng)網(wǎng)絡(luò)模型

表1 3個(gè)神經(jīng)網(wǎng)絡(luò)模型主要參數(shù)
n2采用全狀態(tài)神經(jīng)網(wǎng)絡(luò)模型,主要是考慮作為主要控制參數(shù),n2的數(shù)據(jù)質(zhì)量比較高,跳點(diǎn)和毛刺干擾少,不會(huì)因?yàn)榍袄m(xù)估計(jì)的n2(n-1)的誤差大而導(dǎo)致其誤差在時(shí)間維度向下傳播,影響后續(xù)n2(n+1)、n2(n+2)等的估計(jì)精度的情況;n1和T5采用穩(wěn)態(tài)神經(jīng)網(wǎng)絡(luò)模型,則主要是考慮n1和T5作為被控制參數(shù),數(shù)據(jù)質(zhì)量較差,跳點(diǎn)和毛刺干擾較多,如采用全狀態(tài)神經(jīng)網(wǎng)絡(luò)模型,n1和T5的估計(jì)誤差向下游傳播的可能性較大。n2、n1和T5訓(xùn)練及驗(yàn)證情況如圖11~圖13所示。
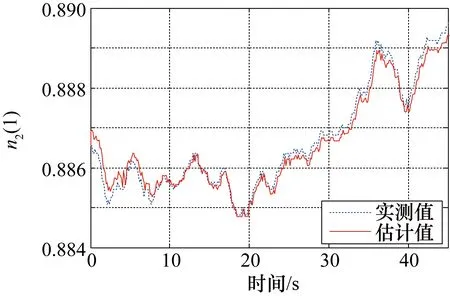
圖11 n2神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練及驗(yàn)證情況
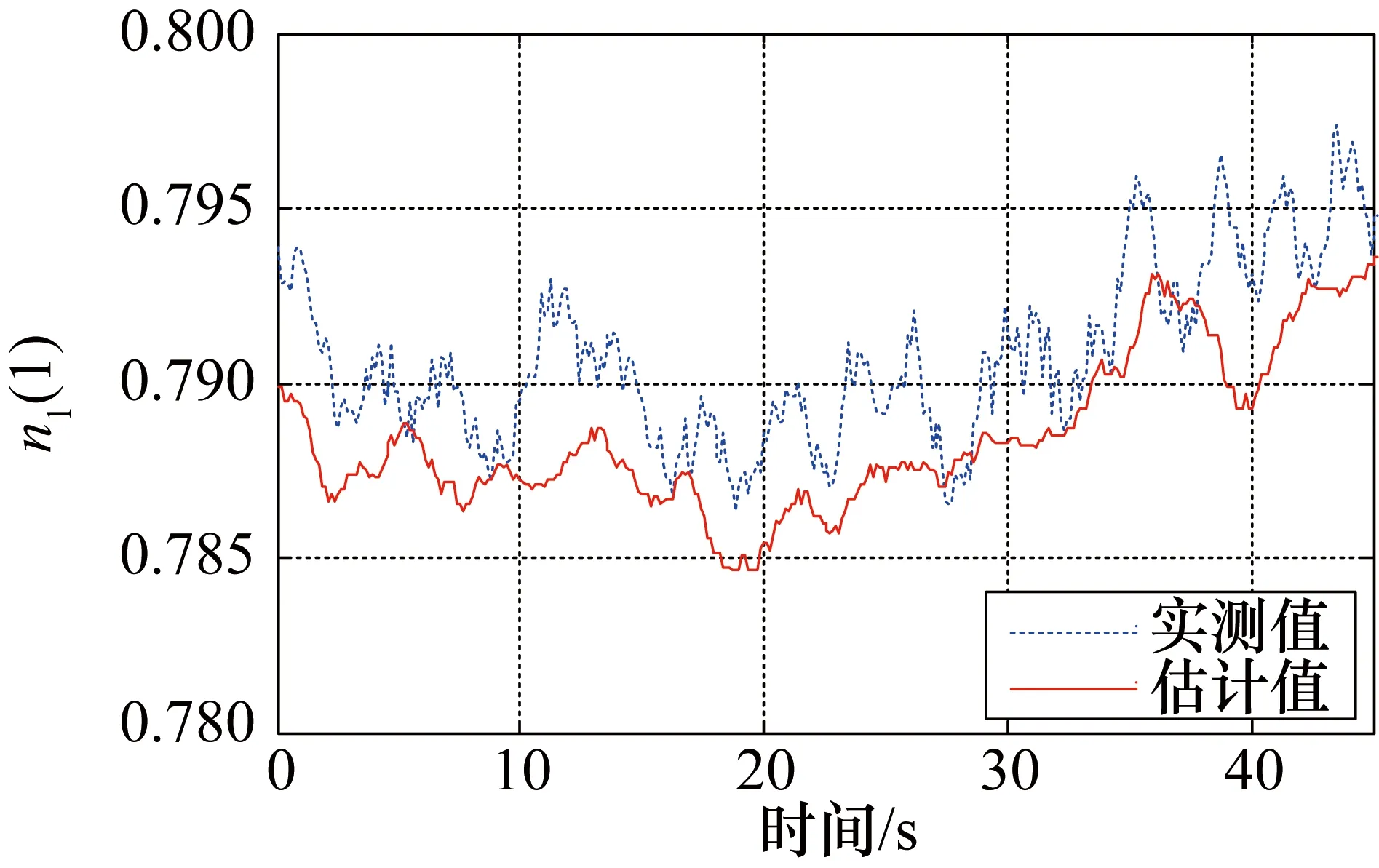
圖12 n1神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練及驗(yàn)證情況

圖13 T5神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練及驗(yàn)證情況
根據(jù)圖8和表1所示,除H(n)、Vi(n)、Ф(n)外,n2的神經(jīng)網(wǎng)絡(luò)模型將油門(mén)桿的歷史數(shù)據(jù)Ф(n-1)和高壓轉(zhuǎn)子轉(zhuǎn)速的歷史數(shù)據(jù)n2(n-1)也作為了其輸入?yún)?shù),這主要是考慮到H、Vi、Ф、n2作為發(fā)動(dòng)機(jī)的主要控制參數(shù),穩(wěn)定性比較高;而且無(wú)論是n2(n),還是n1(n)和T5(n)神經(jīng)網(wǎng)絡(luò)模型的輸入?yún)?shù),其精度要求均比較高。從圖11可以看出,由n2全狀態(tài)神經(jīng)網(wǎng)絡(luò)模型獲得T5估計(jì)值與實(shí)測(cè)值差別比較小,未超過(guò)0.0005(0.05%)。
從圖12和圖13可以看出,相比n2,n1和T5的神經(jīng)網(wǎng)絡(luò)穩(wěn)態(tài)模型精度略差,n1估計(jì)值與實(shí)測(cè)值的偏差最大在0.004(0.4%)左右,T5估計(jì)值與實(shí)測(cè)值的偏差最大在0.008(0.8%)左右。
對(duì)比n2,n1和T5的估計(jì)結(jié)果,可以發(fā)現(xiàn)n2的精度要比n1和T5的精度高,這主要是因?yàn)閚2的輸入?yún)?shù)數(shù)據(jù)質(zhì)量高、且采用了全狀態(tài)神經(jīng)網(wǎng)絡(luò)模型。但總體來(lái)說(shuō),n2,n1和T5的估計(jì)都沒(méi)有超過(guò)1%,可以滿足測(cè)試通道故障檢測(cè)要求。
T5測(cè)試通道故障算法的模糊推理模塊輸入?yún)?shù)Δn2、Δn1、ΔT5,輸出參數(shù)的隸屬函數(shù)ST5的類型、參數(shù)和參數(shù)取值如圖14、圖15和表2所示。隸屬函數(shù)選用了普遍使用的梯形,輸入?yún)?shù)分為小、偏小、正常、偏大、大共5個(gè)模糊等級(jí);輸出參數(shù)分為正常、黃色告警、紅色告警共3個(gè)模糊等級(jí)。上述隸屬函數(shù)參數(shù)的取值是通過(guò)對(duì)試飛數(shù)據(jù)的統(tǒng)計(jì)分析獲得。
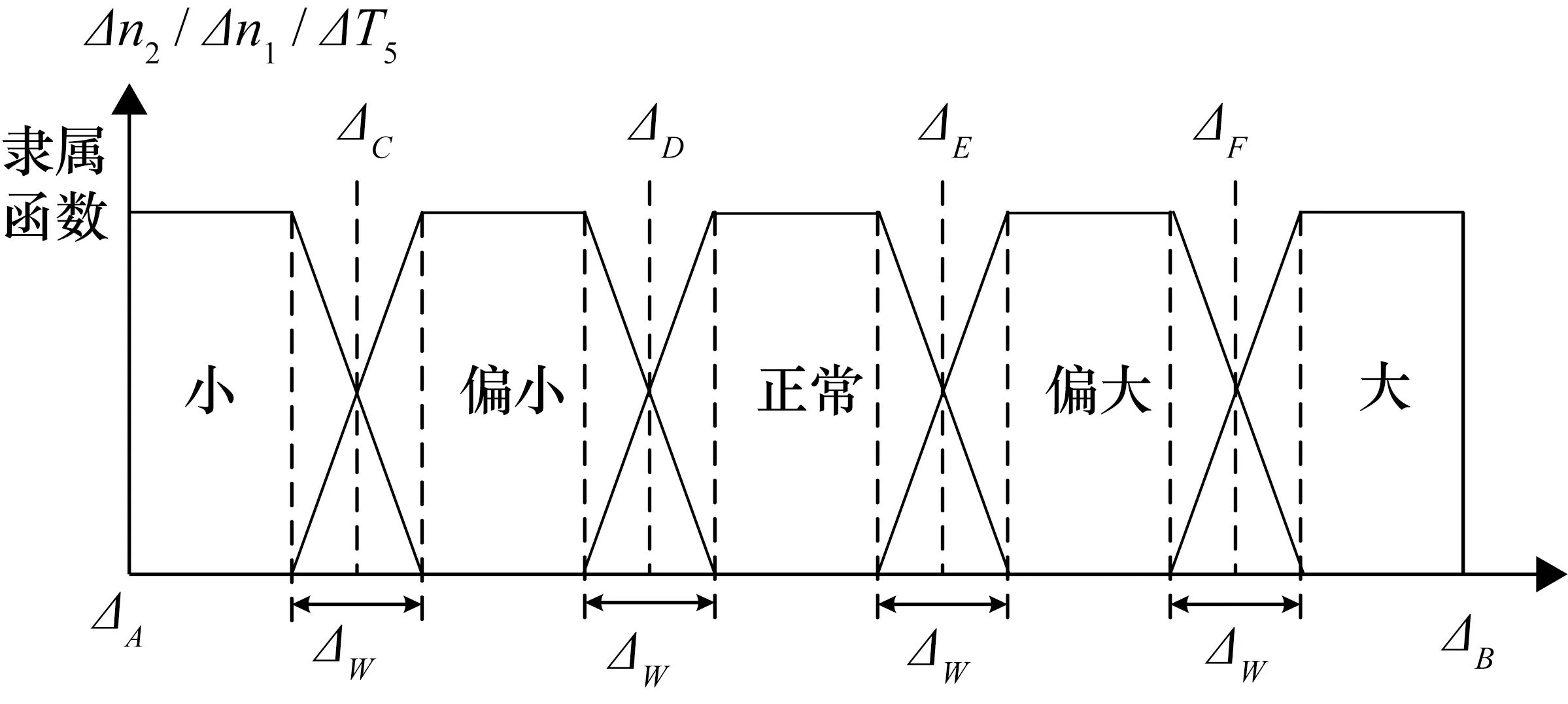
圖14 模糊推理模塊輸入?yún)?shù)隸屬函數(shù)
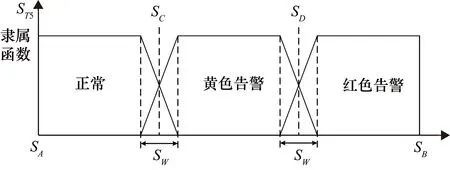
圖15 模糊推理模塊輸出參數(shù)隸屬函數(shù)
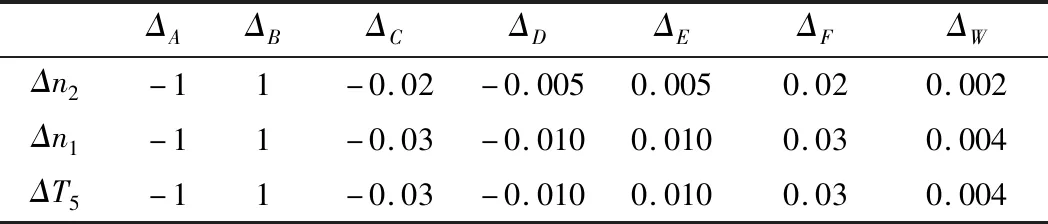
表2 模糊推理模塊輸入?yún)?shù)的隸屬函數(shù)參數(shù)取值

表3 模糊推理模塊輸出參數(shù)的隸屬函數(shù)參數(shù)取值
最后利用某航空動(dòng)力裝置某架次爬升階段排氣溫度T5故障數(shù)據(jù)對(duì)故障自動(dòng)檢測(cè)算法進(jìn)行了驗(yàn)證,結(jié)果如圖16所示。
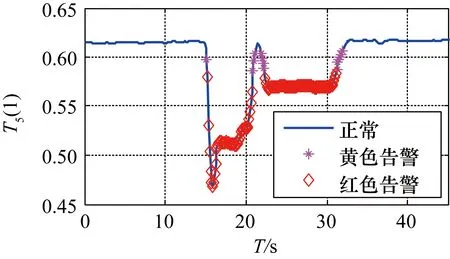
圖16 某次故障數(shù)據(jù)分析結(jié)果
從圖16可以看出,在飛機(jī)姿態(tài)和發(fā)動(dòng)機(jī)狀態(tài)保持不變的情況下,圖7所示的算法可以自動(dòng)檢測(cè)T5明顯偏離正常值的情況。此外,算法自動(dòng)檢測(cè)故障發(fā)生和結(jié)束時(shí)間也符合實(shí)際情況,且輸出穩(wěn)定連續(xù),未出現(xiàn)突然跳變等情況。綜上可以確定,圖7給出的方法可以實(shí)現(xiàn)對(duì)航空發(fā)動(dòng)機(jī)起飛階段排氣溫度測(cè)量通道故障的自動(dòng)檢測(cè),且具有良好的穩(wěn)定性。
4 結(jié)論
本文針對(duì)試飛中航空發(fā)動(dòng)機(jī)試飛安全監(jiān)控、被試發(fā)動(dòng)機(jī)和試驗(yàn)機(jī)技術(shù)狀態(tài)管理需求背景,結(jié)合排故經(jīng)驗(yàn),給出了融合了相關(guān)參數(shù)神經(jīng)網(wǎng)絡(luò)建模和故障檢測(cè)模糊邏輯推理的航空發(fā)動(dòng)機(jī)排氣溫度測(cè)量通道故障自動(dòng)檢測(cè)算法,并利用試飛數(shù)據(jù)對(duì)故障檢測(cè)算法進(jìn)行了驗(yàn)證和分析,得出以下結(jié)論:
① 基于高壓轉(zhuǎn)子轉(zhuǎn)速偏差、低壓轉(zhuǎn)子轉(zhuǎn)速偏差、排氣溫度偏差的模糊推理系統(tǒng)可以實(shí)現(xiàn)對(duì)航空發(fā)動(dòng)機(jī)排氣溫測(cè)量通道故障的實(shí)時(shí)自動(dòng)檢測(cè),檢測(cè)結(jié)果與實(shí)際情況一致,且具有良好的穩(wěn)定性;
② 基于試飛數(shù)據(jù)的高壓轉(zhuǎn)子轉(zhuǎn)速神經(jīng)網(wǎng)絡(luò)全狀態(tài)參數(shù)估計(jì)模型,以及基于試飛數(shù)據(jù)的低壓轉(zhuǎn)子轉(zhuǎn)速和排氣溫度神經(jīng)網(wǎng)絡(luò)穩(wěn)態(tài)參數(shù)估計(jì)模型可以實(shí)現(xiàn)對(duì)高壓轉(zhuǎn)子轉(zhuǎn)速、低壓轉(zhuǎn)子轉(zhuǎn)速、排氣溫度的參數(shù)建模,模型精度可以滿足航空發(fā)動(dòng)機(jī)排氣溫度測(cè)量通道故障自動(dòng)檢測(cè)要求;
③ 神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)和訓(xùn)練樣本數(shù)據(jù)對(duì)高壓轉(zhuǎn)子轉(zhuǎn)速、低壓轉(zhuǎn)子轉(zhuǎn)速、排氣溫度神經(jīng)網(wǎng)絡(luò)模型的精度影響比較大,在訓(xùn)練時(shí)需要根據(jù)訓(xùn)練結(jié)果及時(shí)進(jìn)行調(diào)整;
④ 為了保證高壓轉(zhuǎn)子轉(zhuǎn)速偏差、低壓轉(zhuǎn)子轉(zhuǎn)速偏差、排氣溫度偏差、排氣溫度測(cè)量通道故障狀態(tài)隸屬函數(shù)的適用性,隸屬函數(shù)參數(shù)的確定需要通過(guò)對(duì)試飛數(shù)據(jù)統(tǒng)計(jì)分析的方法獲得,且統(tǒng)計(jì)樣本需要進(jìn)行篩選和預(yù)處理。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
