基于分段高斯偽譜法的平行自主泊車(chē)路徑規(guī)劃*
2020-01-04 02:59:12錢(qián)立軍仇多洋胡偉龍
汽車(chē)工程 2019年12期
關(guān)鍵詞:區(qū)域
錢(qián)立軍,吳 冰,仇多洋,胡偉龍
(合肥工業(yè)大學(xué)汽車(chē)與交通工程學(xué)院,合肥 230009)
前言
隨著輔助駕駛和無(wú)人駕駛技術(shù)的發(fā)展,汽車(chē)自動(dòng)化、智能化程度在逐漸提高,其中自主泊車(chē)技術(shù)可以減小駕駛員在面對(duì)狹小空間泊車(chē)時(shí)的難度,同時(shí)也提高了駕駛員舒適性和泊車(chē)安全性。自主泊車(chē)技術(shù)研究包括3個(gè)方面:環(huán)境感知、路徑規(guī)劃和路徑跟蹤控制。路徑規(guī)劃作為其中一項(xiàng)重要技術(shù),對(duì)此國(guó)內(nèi)外學(xué)者已做大量研究,文獻(xiàn)[1]和文獻(xiàn)[2]中基于幾何方法構(gòu)造泊車(chē)路徑,通過(guò)汽車(chē)從泊車(chē)位逆向駛出和起始泊車(chē)位置結(jié)合,以最小轉(zhuǎn)彎半徑的圓弧與其他半徑的圓弧相切進(jìn)行連接得到泊車(chē)路徑,該方法較為簡(jiǎn)單實(shí)用,但得到的路徑曲率不連續(xù)。文獻(xiàn)[3]~文獻(xiàn)[5]中分別采用回旋曲線、B樣條曲線和反正切多項(xiàng)式曲線進(jìn)行泊車(chē)路徑規(guī)劃,解決了幾何路徑曲率不連續(xù)的問(wèn)題,但需要較大的車(chē)位空間,在面對(duì)狹小空間時(shí)無(wú)法完成路徑規(guī)劃。文獻(xiàn)[6]和文獻(xiàn)[7]中基于智能算法進(jìn)行泊車(chē)路徑規(guī)劃和優(yōu)化,將平行自主泊車(chē)過(guò)程分為3段,采用模糊控制方法設(shè)計(jì)泊車(chē)控制算法;以最短路徑為目標(biāo),采用遺傳算法對(duì)垂直泊車(chē)路徑進(jìn)行優(yōu)化,可擴(kuò)大泊車(chē)初始區(qū)域。文獻(xiàn)[8]和文獻(xiàn)[9]中基于最優(yōu)化和動(dòng)態(tài)優(yōu)化理論,分別采用傳統(tǒng)高斯偽譜法和聯(lián)立動(dòng)態(tài)優(yōu)化法對(duì)自主泊車(chē)路徑規(guī)劃問(wèn)題進(jìn)行求解。
針對(duì)以上問(wèn)題,本文中提出一種在不同泊車(chē)區(qū)域內(nèi)采用分段高斯偽譜法求解的方法,在快速求解前提下以最短泊車(chē)完成時(shí)間為最優(yōu)目標(biāo)函數(shù),建立車(chē)輛運(yùn)動(dòng)學(xué)模型、動(dòng)力學(xué)約束、端點(diǎn)約束和路徑約束,用最優(yōu)控制問(wèn)題描述自主泊車(chē)路徑規(guī)劃問(wèn)題。通過(guò)分段高斯偽譜法先將最優(yōu)控制問(wèn)題進(jìn)行離散化處理,根據(jù)泊車(chē)區(qū)域不同建立相應(yīng)的約束模型,再采用內(nèi)點(diǎn)法對(duì)非線性問(wèn)題進(jìn)行求解。對(duì)5種不同平行泊車(chē)工況路徑規(guī)劃進(jìn)行仿真分析,并與傳統(tǒng)偽譜法進(jìn)行對(duì)比,最后通過(guò)實(shí)車(chē)試驗(yàn)驗(yàn)證了該方法得到的自主泊車(chē)路徑的有效性。
1 車(chē)輛泊車(chē)運(yùn)動(dòng)過(guò)程分析
1.1 車(chē)輛運(yùn)動(dòng)學(xué)模型建立
車(chē)輛在自主泊車(chē)過(guò)程中車(chē)速較低,可忽略輪胎發(fā)生側(cè)滑,根據(jù)阿克曼前輪轉(zhuǎn)向原理,建立車(chē)輛自主泊車(chē)運(yùn)動(dòng)學(xué)模型,如圖1所示。
圖中,R(x,y)為車(chē)輛后軸中心點(diǎn),v為后軸中心點(diǎn)速度且方向沿車(chē)輛軸線,O為車(chē)輛瞬時(shí)轉(zhuǎn)彎圓心,L為車(chē)輛軸距,f和r分別為車(chē)輛的前軸到車(chē)頭距離和后軸到車(chē)尾距離,d為車(chē)輛寬度,φ為前輪擺角,θ為車(chē)身姿態(tài)角,A,B,C,D分別為車(chē)身的4個(gè)頂點(diǎn)。
根據(jù)車(chē)輛運(yùn)動(dòng)學(xué)模型可得運(yùn)動(dòng)學(xué)微分方程如下:
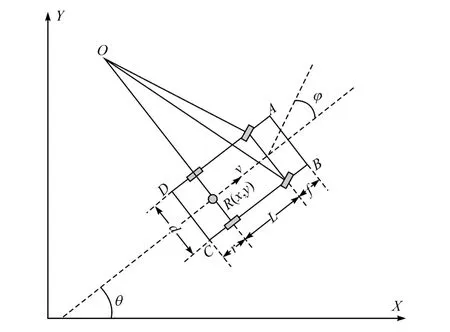
圖1 車(chē)輛運(yùn)動(dòng)學(xué)模型

式中:a為車(chē)輛加速度;ω為前輪擺角角速度。為了提高駕乘人員的舒適性,對(duì)車(chē)輛加速度變化率j進(jìn)行了約束。
根據(jù)幾何關(guān)系,由后軸中心點(diǎn)R(x,y)可得A,B,C,D的坐標(biāo)值如下:

1.2 泊車(chē)避障約束分析
自主泊車(chē)過(guò)程可看作是車(chē)輛在道路和障礙車(chē)輛組成空間內(nèi)的避障運(yùn)動(dòng),泊車(chē)路徑必須滿足在泊車(chē)過(guò)程中無(wú)碰撞發(fā)生和自身約束條件。平行自主泊車(chē)區(qū)域如圖2所示。圖中Ls1+Ls2和Lp分別為道路和泊車(chē)位的長(zhǎng)度,Ws和Wp分別為道路和泊車(chē)位的寬度。
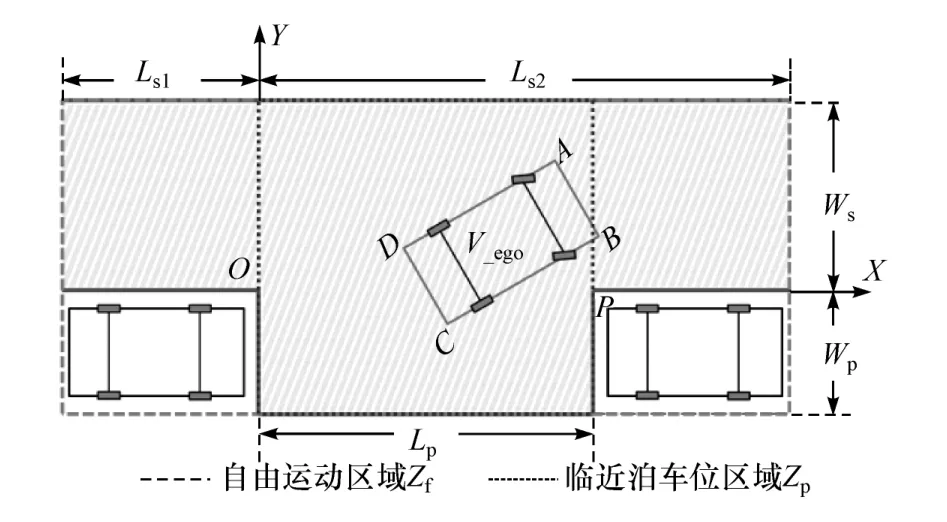
圖2 平行自主泊車(chē)區(qū)域示意圖
根據(jù)文獻(xiàn)[10]對(duì)上述自主泊車(chē)空間劃分為兩個(gè)區(qū)域,分別為自由運(yùn)動(dòng)區(qū)域Zf和臨近泊車(chē)位區(qū)域Zp,通過(guò)分別對(duì)兩個(gè)空間建立不同邊界約束,減少約束條件規(guī)模,提高自主泊車(chē)最優(yōu)化控制問(wèn)題的求解速度,兩區(qū)域范圍表示為
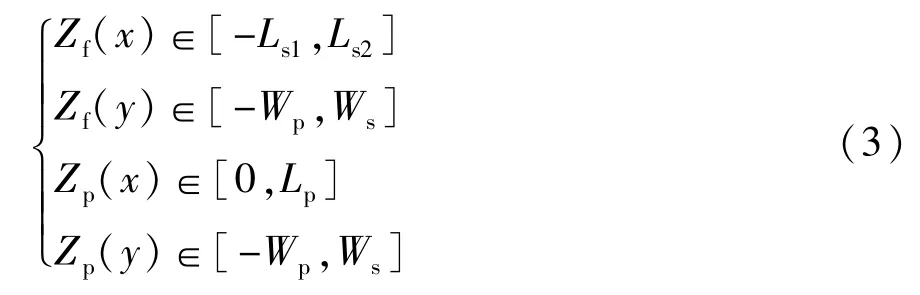
區(qū)域Zf和Zp構(gòu)成了泊車(chē)區(qū)域,因此車(chē)輛4個(gè)頂點(diǎn)A,B,C,D在泊車(chē)過(guò)程中需要落在區(qū)域Zf和Zp中。
雖然上述約束可避免車(chē)輛頂點(diǎn)不與障礙物發(fā)生碰撞,但不能保證車(chē)身與障礙物之間不發(fā)生碰撞,車(chē)輛從區(qū)域Zf進(jìn)入Zp時(shí),如圖2所示,車(chē)身BC邊可能會(huì)與P點(diǎn)發(fā)生碰撞,若無(wú)碰撞發(fā)生,在車(chē)輛進(jìn)入?yún)^(qū)域Zp之前,BC邊需保持處于P點(diǎn)的左側(cè)。由幾何關(guān)系可得

2 泊車(chē)最優(yōu)控制問(wèn)題建立
2.1 最優(yōu)控制問(wèn)題
不失一般性,非線性最優(yōu)控制Bolza問(wèn)題可以描述為

式中的系統(tǒng)狀態(tài)變量和控制變量分別為x和μ,且x(t)∈Rn,μ(t)∈Rm,t0和tf分別為系統(tǒng)初始時(shí)刻和終止時(shí)刻。min J為最優(yōu)控制問(wèn)題的目標(biāo)函數(shù),式(9)中第1式為系統(tǒng)狀態(tài)微分方程,第2式為路徑約束不等式方程,第3式為端點(diǎn)約束等式方程。
2.2 車(chē)輛動(dòng)力學(xué)條件約束
車(chē)輛在運(yùn)動(dòng)過(guò)程中受到車(chē)輛自身物理?xiàng)l件約束,其對(duì)系統(tǒng)的部分狀態(tài)變量和控制變量的約束為

式中:vmax為車(chē)輛運(yùn)動(dòng)的最大車(chē)速;amax為最大加速度;jmax為最大加速度變化率;φmax為最大前輪擺角;ωmax為最大前輪擺角角速度。
2.3 端點(diǎn)約束
基于上述的運(yùn)動(dòng)學(xué)模型和約束條件,車(chē)輛可以完成從起始時(shí)刻t0到終止時(shí)刻tf的無(wú)碰撞運(yùn)動(dòng),本文中僅考慮在t0和tf時(shí)刻車(chē)輛為靜止情況,起始時(shí)刻t0車(chē)輛后軸中心點(diǎn)處于指定位置(x0,y0),終止時(shí)刻tf車(chē)輛4個(gè)頂點(diǎn)均在泊車(chē)位空間內(nèi),在t0和tf時(shí)刻都要求車(chē)身水平,轉(zhuǎn)向盤(pán)處于中間位置,即車(chē)身姿態(tài)角和轉(zhuǎn)向盤(pán)轉(zhuǎn)角均為0°,端點(diǎn)約束條件為
2.4 最優(yōu)目標(biāo)函數(shù)
自主泊車(chē)技術(shù)解決交通問(wèn)題其中之一就是避免造成交通阻塞,幫助駕駛員快速完成車(chē)輛泊車(chē)入位,減少對(duì)車(chē)道的占用時(shí)間,因此本文中選用最短泊車(chē)完成時(shí)間min tf為最優(yōu)控制問(wèn)題的目標(biāo)函數(shù)。
3 分段高斯偽譜法算法設(shè)計(jì)
高斯偽譜法(GPM)是一種直接求解最優(yōu)化方法,該方法首先對(duì)連續(xù)的最優(yōu)化問(wèn)題進(jìn)行離散化處理,再進(jìn)行非線性規(guī)劃問(wèn)題求解[11-12],但該方法為全局優(yōu)化方法,隨著問(wèn)題約束數(shù)量增多和求解精度要求提高,需要增加大量配置點(diǎn)而導(dǎo)致計(jì)算時(shí)間急劇增加,甚至出現(xiàn)求解不收斂。本文中提出一種在不同泊車(chē)區(qū)域內(nèi)采用分段高斯偽譜法求解的方法,并對(duì)區(qū)域Zf和區(qū)域Zp連接處的時(shí)刻條件進(jìn)行松弛處理,提高最優(yōu)控制問(wèn)題求解收斂速率。
3.1 時(shí)域變換
式(8)中最優(yōu)控制問(wèn)題的時(shí)間取值范圍為t∈[t0,tf],將時(shí)間分成p段,即0=t0<t1…tq-1<tq<…tp=tf,由此每段時(shí)間域的步長(zhǎng)為

由于GPM中選取離散點(diǎn)的區(qū)間為τ∈[-1,1],因此通過(guò)時(shí)域變換將第q段上時(shí)間變量轉(zhuǎn)換為變量τ,變換如下:

由式(13)可得每段時(shí)間區(qū)域內(nèi)的最優(yōu)控制問(wèn)題,其描述如下:

3.2 變量離散化
GPM是將控制變量和狀態(tài)變量均需要在Legendre-Gauss(LG)配置點(diǎn)上進(jìn)行離散化,再通過(guò)構(gòu)建拉格朗日插值函數(shù)逼近控制變量和狀態(tài)變量,在區(qū)間[τ0,τf]上,N階的Legendre多項(xiàng)式為

以式(15)的零點(diǎn)和τ0組成N+1個(gè)配置點(diǎn),在每個(gè)t(q)時(shí)間域中,狀態(tài)變量、控制變量由多項(xiàng)式近似表示為

式(16)中,Lagrange插值基函數(shù)為
由式(16)第1式求導(dǎo),可將插值函數(shù)微分逼近狀態(tài)變量的微分形式,得到在τk點(diǎn)的狀態(tài)變量導(dǎo)數(shù),可近似表示為

結(jié)合式(14)和式(18)可得微分代數(shù)等式約束:

離散后的路徑約束和端點(diǎn)約束分別為

在自主泊車(chē)過(guò)程中需要保證路徑曲率連續(xù)性,因此狀態(tài)變量也必須為連續(xù)變化,即每段終端時(shí)刻狀態(tài)變量作為下一段初始時(shí)刻狀態(tài)變量,控制變量可以不連續(xù),其連接處約束等式為

由于LG配置點(diǎn)中不包含終端時(shí)刻狀態(tài)值,由式(22),根據(jù)Legendre-Gauss型求積公式計(jì)算終端時(shí)刻狀態(tài)變量:

式中Ak和f(τk)分別為高斯積分權(quán)重系數(shù)和求積函數(shù)。
經(jīng)過(guò)上述離散化過(guò)程,可將自主泊車(chē)路徑規(guī)劃的最優(yōu)控制問(wèn)題轉(zhuǎn)化為非線性規(guī)劃問(wèn)題進(jìn)行求解,可采用SQP、內(nèi)點(diǎn)法等方法,本文中使用IPOPT[13]內(nèi)點(diǎn)法工具箱進(jìn)行求解。
3.3 改進(jìn)的分段高斯偽譜法
在最優(yōu)控制問(wèn)題的約束數(shù)量較多時(shí),傳統(tǒng)偽譜法為了滿足求解精度會(huì)增加大量配置點(diǎn),這導(dǎo)致求解速度和收斂速度都會(huì)降低,因此,一方面可通過(guò)選取合適的配置點(diǎn)數(shù)和段數(shù)提高求解效率[14-15],另一方面針對(duì)研究對(duì)象將最優(yōu)控制問(wèn)題分解為若干求解難度較低的子問(wèn)題后再進(jìn)行求解[16-17]。根據(jù)上文中的自主泊車(chē)避障約束分析,將泊車(chē)空間劃分為區(qū)域Zf和區(qū)域Zp,由于兩個(gè)區(qū)域連接點(diǎn)位置不確定,因此將此連接點(diǎn)處的狀態(tài)參數(shù)和控制參數(shù)作為待優(yōu)化的參數(shù)。
本文中提出一種改進(jìn)的分段高斯偽譜法,首先對(duì)控制問(wèn)題進(jìn)行無(wú)最優(yōu)目標(biāo)全局求解,將求得最優(yōu)解作為后續(xù)優(yōu)化的初值,再分別在區(qū)域Zf和區(qū)域Zp內(nèi)采用高斯偽譜法對(duì)自主泊車(chē)路徑最優(yōu)控制問(wèn)題進(jìn)行求解,減小求解過(guò)程中約束規(guī)模,提高算法收斂性,其算法描述見(jiàn)表1。

表1 算法描述
4 仿真分析
根據(jù)車(chē)輛自主泊車(chē)運(yùn)動(dòng)學(xué)模型,通過(guò)Matlab/Simulink搭建自主泊車(chē)仿真平臺(tái),以某SUV為仿真對(duì)象,其車(chē)輛參數(shù)和物理約束如表2所示。
本文中以平行自主泊車(chē)工況為例進(jìn)行路徑規(guī)劃算法驗(yàn)證和仿真分析。為了驗(yàn)證算法統(tǒng)一有效性,針對(duì)5種不同長(zhǎng)度車(chē)位選取同一泊車(chē)起始位置,選取后軸中心點(diǎn)位置為x0=9 m;y0=1.5 m,車(chē)位長(zhǎng)度Lp分別為4.8~7.8 m,即分別為車(chē)身長(zhǎng)度的1.1~1.8倍,車(chē)位寬度Wp為2.5 m,道路寬度Ws為3.5 m,車(chē)輛泊入車(chē)位的起始條件和終止條件如式(11)所示,仿真結(jié)果如圖3~圖12所示。

表2 車(chē)輛參數(shù)和物理約束

圖3 L p=7.8 m自主泊車(chē)示意圖
通過(guò)上文的自主泊車(chē)示意圖可知,在泊車(chē)的過(guò)程中,車(chē)輛與道路邊界和前后車(chē)輛未發(fā)生碰撞,泊車(chē)結(jié)束時(shí),車(chē)輛處于泊車(chē)位空間內(nèi)且車(chē)身水平滿足自主泊車(chē)路徑的避障約束和端點(diǎn)約束條件,結(jié)果表明分段高斯偽譜法可對(duì)自主泊車(chē)路徑規(guī)劃最優(yōu)控制問(wèn)題進(jìn)行求解并得到滿足條件的泊車(chē)路徑。
由圖3和圖5可知,在泊車(chē)空間較大工況下,車(chē)輛經(jīng)過(guò)一次倒退和一次車(chē)位內(nèi)向前微調(diào)完成泊車(chē)過(guò)程,由圖4和圖6可知,泊車(chē)路徑較平滑且完成泊車(chē)用時(shí)較短,分別為11.363和11.816 s,狀態(tài)變量、控制變量都滿足約束條件。由圖7、圖9和圖11可知,隨著泊車(chē)空間逐漸減小,車(chē)輛在區(qū)域Zp內(nèi)前后運(yùn)動(dòng)次數(shù)和泊車(chē)完成時(shí)間也逐漸增加,泊車(chē)用時(shí)分別為16.337,24.078和55.057 s,這也與駕駛員日常泊車(chē)過(guò)程類似,但從區(qū)域Zf到區(qū)域Zp的過(guò)程中路徑依然較為平滑。由圖8、圖10和圖12可知,車(chē)輛通過(guò)左右轉(zhuǎn)動(dòng)轉(zhuǎn)向盤(pán)分別在泊車(chē)位內(nèi)經(jīng)過(guò)2,5和19次前后移動(dòng)微調(diào)直至泊車(chē)完成,對(duì)比發(fā)現(xiàn)在泊車(chē)位長(zhǎng)度小于車(chē)身長(zhǎng)度1.5倍時(shí),車(chē)輛在泊車(chē)位內(nèi)的微調(diào)次數(shù)急劇增加。在圖12中,輪胎擺角角速度最大絕對(duì)值為2.904 2 rad/s,其數(shù)值超過(guò)上文設(shè)定約束范圍,表明車(chē)輛在狹小泊車(chē)位內(nèi)進(jìn)行微調(diào)時(shí)出現(xiàn)原地轉(zhuǎn)向現(xiàn)象。
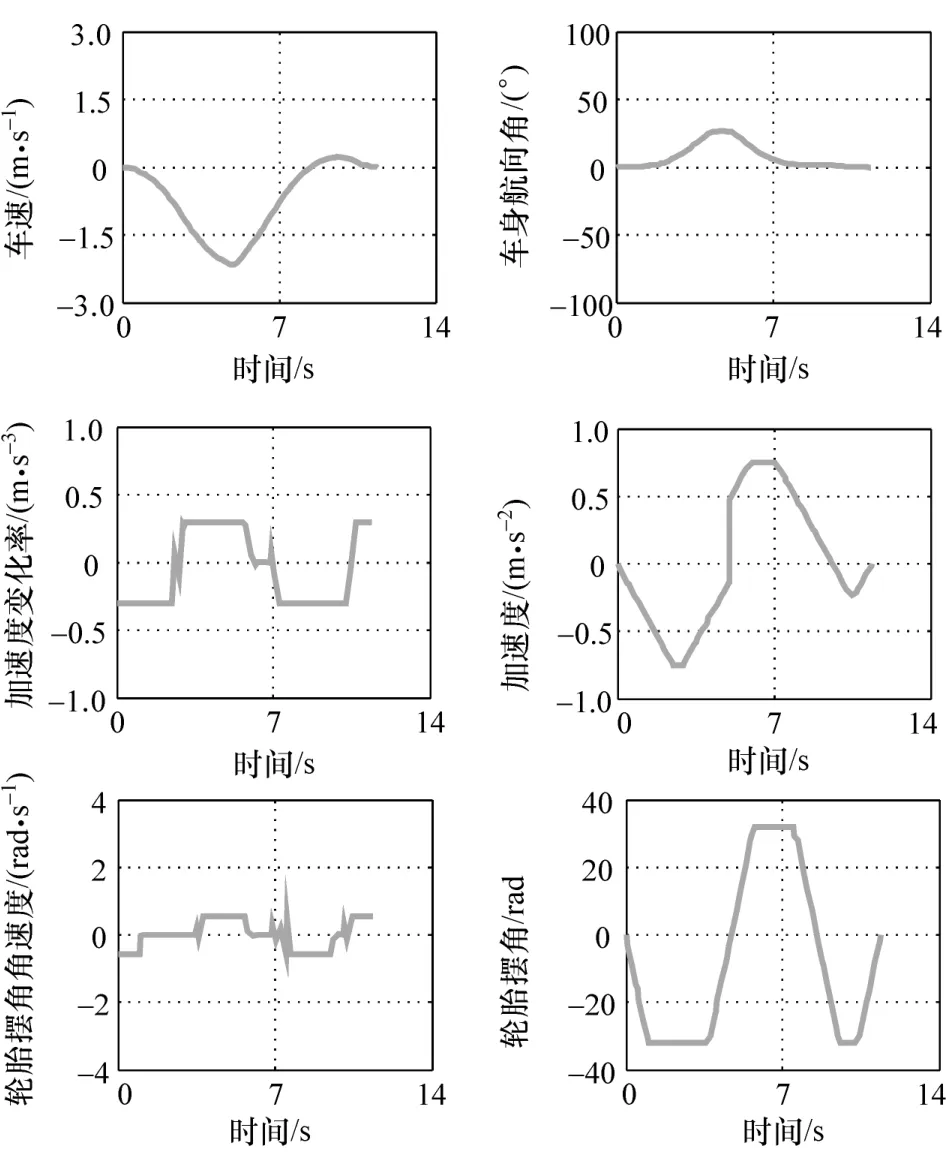
圖4 L p=7.8 m自主泊車(chē)仿真結(jié)果
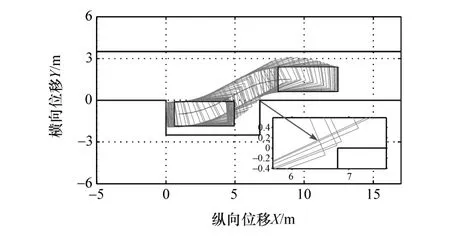
圖5 L p=6.8 m自主泊車(chē)示意圖
對(duì)上述5種不同長(zhǎng)度泊車(chē)位平行泊車(chē)工況采用傳統(tǒng)GPM方法進(jìn)行求解,并與本文方法求解結(jié)果進(jìn)行對(duì)比分析,兩種不同高斯偽譜法的泊車(chē)完成用時(shí)最優(yōu)目標(biāo)tf和問(wèn)題求解CPU計(jì)算耗時(shí)結(jié)果如圖13所示,在泊車(chē)位長(zhǎng)度為4.8和5.3 m時(shí),采用傳統(tǒng)GPM求解最優(yōu)控制問(wèn)題時(shí)未收斂,在泊車(chē)位較大時(shí),兩種方法都能夠收斂,泊車(chē)完成用時(shí)tf較為接近,但分段GPM在計(jì)算耗時(shí)方面占優(yōu),分別為傳統(tǒng)GPM的15.85%,17.69%和27.44%,這是由于本文算法選用合理初值,在兩個(gè)泊車(chē)區(qū)域內(nèi)分別建立約束條件,減小了約束條件數(shù)量規(guī)模和運(yùn)算復(fù)雜度,提高了算法收斂性。

圖6 L p=6.8 m自主泊車(chē)仿真結(jié)果
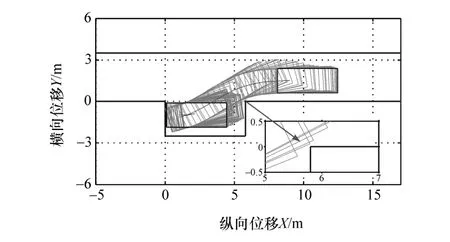
圖7 L p=5.8 m自主泊車(chē)示意圖
5 實(shí)車(chē)試驗(yàn)
試驗(yàn)車(chē)采用超聲波傳感器作為環(huán)境感知傳感器,為自主泊車(chē)控制系統(tǒng)提供車(chē)位探測(cè)信息和車(chē)輛與周?chē)系K物距離信息。電動(dòng)助力轉(zhuǎn)向系統(tǒng)的角度傳感器提供轉(zhuǎn)向盤(pán)角度信號(hào),制動(dòng)系統(tǒng)的輪速傳感器和加速度傳感器分別提供輪速脈沖信號(hào)、縱向加速度信號(hào)和橫擺角速度信號(hào),自主泊車(chē)控制器對(duì)上述信號(hào)處理得到泊車(chē)目標(biāo)路徑信息,包括目標(biāo)轉(zhuǎn)向盤(pán)轉(zhuǎn)角、目標(biāo)車(chē)速和目標(biāo)擋位等,通過(guò)轉(zhuǎn)向系統(tǒng)、制動(dòng)系統(tǒng)、動(dòng)力系統(tǒng)和擋位系統(tǒng)分別實(shí)現(xiàn)對(duì)試驗(yàn)車(chē)的轉(zhuǎn)向控制、車(chē)速控制和擋位控制,各系統(tǒng)之間信號(hào)采用CAN總線進(jìn)行通信,如圖14所示。

圖8 L p=5.8 m自主泊車(chē)仿真結(jié)果

圖9 L p=5.3 m自主泊車(chē)示意圖
考慮到超聲波傳感器探測(cè)存在盲區(qū),為了避免車(chē)輛發(fā)生碰撞,車(chē)輛在泊車(chē)位內(nèi)有效運(yùn)動(dòng)范圍比實(shí)際泊車(chē)位小,因此泊車(chē)路徑規(guī)劃時(shí)采用有效運(yùn)動(dòng)范圍作為算法輸入?yún)?shù)。本文中試驗(yàn)車(chē)上裝配的短距超聲波傳感器盲區(qū)范圍為0~0.15 m,所以規(guī)定有效車(chē)位長(zhǎng)度比實(shí)測(cè)車(chē)位長(zhǎng)度小0.3 m,試驗(yàn)中實(shí)際泊車(chē)位長(zhǎng)度為在前述仿真中5種不同車(chē)位長(zhǎng)度上分別增加0.3 m,泊車(chē)起始橫向位置為9.15 m,其他參數(shù)設(shè)置與仿真工況相同。車(chē)輛在駛過(guò)車(chē)位時(shí),通過(guò)側(cè)向長(zhǎng)距超聲波傳感器進(jìn)行車(chē)位探測(cè),行駛至起始泊車(chē)位置并保持車(chē)輛靜止,自主泊車(chē)系統(tǒng)接管車(chē)輛,采用仿真得到的路徑數(shù)據(jù)指導(dǎo)車(chē)輛進(jìn)行泊車(chē),實(shí)車(chē)試驗(yàn)如圖15所示。

圖10 L p=5.3 m自主泊車(chē)仿真結(jié)果
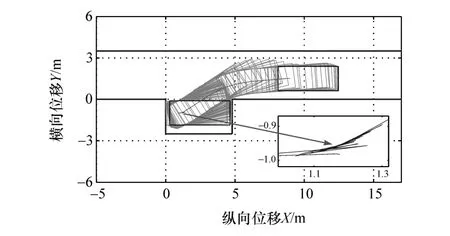
圖11 L p=4.8 m自主泊車(chē)示意圖
通過(guò)記錄實(shí)測(cè)車(chē)位長(zhǎng)度、泊車(chē)過(guò)程中車(chē)輛是否與障礙物發(fā)生碰撞,以及測(cè)量泊車(chē)完成后車(chē)輛外側(cè)頂點(diǎn)A與D縱向位置和車(chē)身姿態(tài)角來(lái)判斷泊車(chē)完成情況,試驗(yàn)結(jié)果如表3所示。
由試驗(yàn)結(jié)果可知,由于超聲波傳感器波束角的物理特性導(dǎo)致對(duì)車(chē)位的測(cè)量長(zhǎng)度比實(shí)際長(zhǎng)度小,將測(cè)量長(zhǎng)度作為路徑規(guī)劃算法的輸入?yún)?shù)也保證了泊車(chē)過(guò)程中的安全性。在泊車(chē)過(guò)程中車(chē)輛與障礙物未發(fā)生碰撞現(xiàn)象,泊車(chē)完成后,從頂點(diǎn)位置數(shù)據(jù)對(duì)比可知,隨著車(chē)位長(zhǎng)度逐漸減小,車(chē)輛在縱向上也逐漸靠近車(chē)位外側(cè),由于車(chē)位長(zhǎng)度較小時(shí)車(chē)輛在泊車(chē)位內(nèi)前后移動(dòng)微調(diào)次數(shù)增多,在微調(diào)過(guò)程中車(chē)輛逐漸偏向車(chē)位外側(cè),但試驗(yàn)中完成泊車(chē)后,車(chē)輛外側(cè)的頂點(diǎn)均落在車(chē)位內(nèi),車(chē)身姿態(tài)角在±1.5°范圍以內(nèi),因此采用本文方法得到的路徑信息可有效指導(dǎo)自主泊車(chē)完成。

圖12 L p=4.8 m自主泊車(chē)仿真結(jié)果
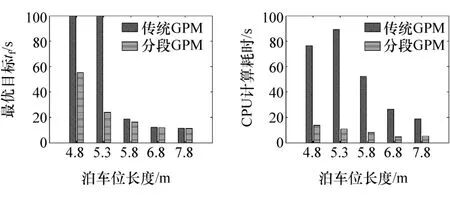
圖13 兩種方法求解結(jié)果對(duì)比圖
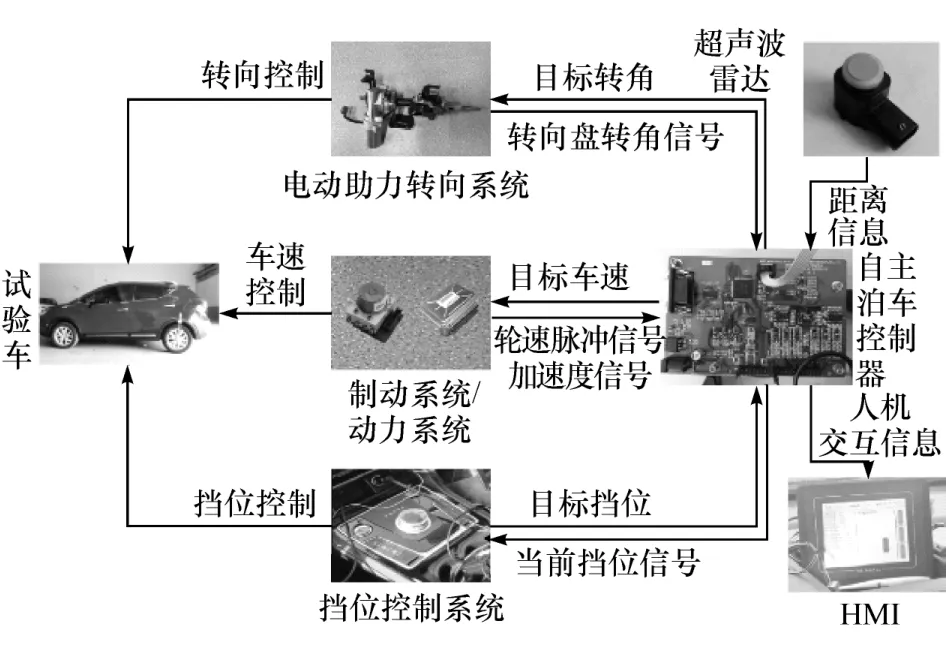
圖14 試驗(yàn)車(chē)自主泊車(chē)系統(tǒng)架構(gòu)圖

圖15 自主泊車(chē)平行工況實(shí)車(chē)試驗(yàn)

表3 實(shí)車(chē)試驗(yàn)結(jié)果
6 結(jié)論
(1)本文中提出一種在不同泊車(chē)區(qū)域采用分段高斯偽譜法的自主泊車(chē)路徑規(guī)劃方法,通過(guò)建立車(chē)輛運(yùn)動(dòng)學(xué)模型、動(dòng)力學(xué)約束、端點(diǎn)約束和路徑避障約束,將泊車(chē)路徑規(guī)劃問(wèn)題轉(zhuǎn)換為最優(yōu)控制問(wèn)題,并以車(chē)輛泊車(chē)完成時(shí)間最短為最優(yōu)目標(biāo)函數(shù),通過(guò)無(wú)最優(yōu)目標(biāo)求解得到問(wèn)題合理初值,再根據(jù)不同泊車(chē)區(qū)域設(shè)置約束條件并進(jìn)行求解。
(2)選取5種不同長(zhǎng)度泊車(chē)位的平行自主泊車(chē)工況進(jìn)行路徑規(guī)劃仿真,結(jié)果表明,所得路徑滿足自主泊車(chē)過(guò)程中約束條件,并與傳統(tǒng)偽譜法進(jìn)行對(duì)比分析表明,本文方法具有更快收斂速度。
(3)在實(shí)車(chē)試驗(yàn)中采用本文算法求解得到的路徑信息指導(dǎo)車(chē)輛進(jìn)行自主泊車(chē),在泊車(chē)過(guò)程中無(wú)碰撞發(fā)生,車(chē)輛最終停在車(chē)位內(nèi)。實(shí)踐表明,本文的研究結(jié)果可為自主泊車(chē)提供有效參考路徑。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15