自卸汽車舉升三角臂結構強度有限元及試驗分析
2020-01-03 17:12:00苑伍德羅昆楊成倫劉大維
青島大學學報(工程技術版) 2020年4期
關鍵詞:有限元
苑伍德 羅昆 楊成倫 劉大維

摘要:? 為進行自卸汽車舉升機構三角臂的結構強度分析,本文以某重型自卸汽車T式舉升機構為例,運用多體動力學分析軟件Adams,建立舉升機構虛擬樣機模型,得到舉升機構三角臂各鉸接點位置的作用力,并應用HyperMesh有限元分析軟件,建立以板殼單元為基本單元的三角臂結構有限元模型,分析了最大載荷工況下的結構強度。為驗證所建有限元模型的正確性,建立舉升結構應變電測試驗系統,提取三角臂關鍵點位的等效應力。研究結果表明,有限元計算結果與試驗測試結果相比,關鍵點位的相對誤差為3.42%~15.55%,表明該三角臂有限元模型及分析方法是正確可行的。該研究為舉升機構的強度分析和結構的進一步改進提供了參考依據。
關鍵詞:? 自卸汽車; 舉升機構; 三角臂; 有限元; 應力試驗
中圖分類號: U469.4; U463.92? 文獻標識碼: A
自卸汽車是通過液壓油缸驅動舉升機構,將車箱傾斜到一定角度自行卸載貨物,靠自身重力使車箱回位的專用汽車。舉升機構作為自卸汽車上的重要工作系統之一,其性能的好壞將直接影響自卸汽車的使用性能[1] 。自卸汽車通常在路況比較惡劣的環境下工作,對舉升機構中各零部件的強度有很高的要求,因此,對其關鍵部件舉升三角臂進行結構強度分析非常必要。對于舉升機構三角臂的結構強度分析,許多學者和企業進行了大量研究,主要采用有限元仿真分析和試驗分析兩種方法,但將兩種方法結合在一起進行分析的研究[2 17] 卻非常少。對舉升機構三角臂結構強度進行試驗分析的正確度高,但在研發過程中結構如需多次改進,則每次都要加工出物理樣機在臺架上進行試驗,耗費大量的人力物力,設計和分析的循環周期較長,成本較高。而有限元仿真分析以其高效和實用性強的特點越來越受開發者的青睞,但由于建模過程中力學模型的簡化與實際結構存在差異,導致仿真計算得到的結果與實際相比誤差較大。因此,采用有限元仿真與試驗相結合的方法可使分析結果更為準確[18] 。基于此,本文采用有限元和試驗相結合的方法,對某企業新研制的自卸汽車T式舉升機構的三角臂結構強度進行研究,以確保該構件的使用可靠性。該研究為進一步改進自卸汽車的舉升結構提供了參考依據。
1 自卸汽車舉升機構虛擬樣機模型建立
1.1 T式舉升機構工作原理
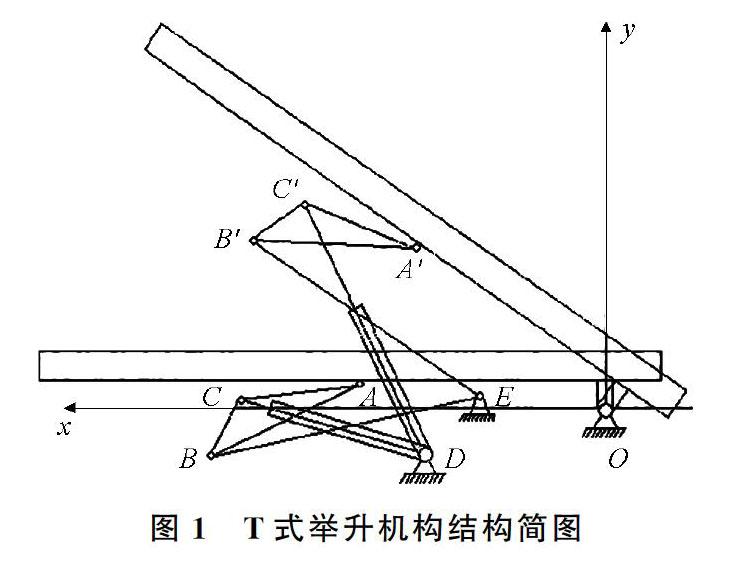
本研究以某重型自卸汽車T式舉升機構為例,T式舉升機構結構簡圖如圖1所示。T式舉升機構主要由三角臂ABC、液壓油缸CD和拉桿臂BE組成,點O是車箱與副車架后翻轉支座的鉸接點。舉升機構工作時,高壓油液經過液壓系統進入液壓油缸,油缸活塞桿受油液推力向上伸長,從而驅動三角臂以及拉桿臂順時針轉動舉升車箱,舉升到一定角度后實現貨物的卸載;卸載完成后,液壓油缸停止進油,油缸活塞桿開始回縮,依靠自重使車箱復位。
1.2 自卸汽車T式舉升機構虛擬樣機建模
由于Adams軟件中提供的三維實體建模功能較弱,對于舉升機構這種復雜的幾何模型很難達到理想的建模效果[19 20] 。因此,本文首先在Pro/E軟件中建立自卸車的三維實體模型,通過parasiold數據內核,將模型數據轉換到動力學分析軟件Adams中。為減少在Adams中運動副的數量,防止過約束情況的出現,需要對模型進行簡化,將固結在一起的零件,通過布爾運算合并成一個構件,并對舉升機構虛擬樣機模型添加約束和驅動等,在Adams軟件中,建立自卸車舉升機構虛擬樣機模型。自卸車T式舉升機構虛擬樣機模型如圖2所示。
由圖2可以看出,三角臂與車箱前支點對應的鉸接點位置用旋轉副約束;車箱后支點與副車架對應的鉸接點位置用旋轉副約束;三角臂與拉桿之間用旋轉副約束;三角臂與油缸推桿對應的鉸接點位置用旋轉副約束;拉桿與副車架對應的鉸接點位置用旋轉副約束;液壓油缸與副車架對應的鉸接點位置用旋轉副約束;油缸推桿與液壓油缸之間用滑移副約束。為舉升機構各構件添加質量參數,設置沿坐標軸 Y方向的重力參數,完成自卸車舉升機構虛擬樣機模型的建立。
1.3 舉升機構三角臂作用力仿真分析
仿真計算時,最大舉升角為48°,裝載量為30 t,舉升過程通過液壓缸和活塞桿之間移動副的相對運動實現。通過仿真分析計算,三角臂各鉸接點作用力隨舉升時間變化曲線如圖3所示。由圖3可以看出,三角臂各鉸接點的作用力隨著舉升時間達到最大值后逐漸減小,由于仿真時采用不卸載的方式,各鉸接點的作用力無法減小到0。
2 舉升機構三角臂的有限元強度分析
2.1 舉升機構三角臂的有限元模型建立
通過有限元分析軟件HyperMesh,完成三角臂有限元計算模型的網格劃分,由于舉升機構的三角臂均由板殼單元組成,因此三角臂主要采用邊長為4 mm的混合板殼單元(shell)進行劃分,與拉桿臂和車箱鉸接點的位置采用邊長為4 mm的六面體單元(Solid)劃分。三角臂中各單元之間主要采用焊接的方式連接在一起,在Hypermesh中,運用焊接單元(Spotweld)進行模擬。舉升三角臂的材料為Q345鋼,舉升三角臂力學參數如表1所示。
整個三角臂的有限元模型由102 397個單元和105 999個節點組成,三角臂有限元模型如圖4所示。
2.2 邊界條件的確定和載荷的施加
在三角臂有限元模型中,拉桿和車箱約束點確定在鉸接點中心節點處,三角臂與拉桿鉸接點約束沿x、z方向的平動自由度和沿y、z方向的旋轉自由度,三角臂與車箱的鉸接點約束x、y、z方向的平動自由度和沿y、z方向的旋轉自由度。得到三角臂在舉升過程中所受的最大應力,從Adams中求出的力作為載荷,載荷按照三角臂與油缸鉸接點處作用力的最大值施加。
2.3 三角臂靜態強度有限元計算結果及分析
三角臂受力最大時的應力分布云圖如圖為5所示。由圖5可以看出,應力主要集中在三角臂上邊板和下邊板處,其中在三角臂的下邊板靠近拉桿銷孔的焊接處某一位置的應力值較大,應力值最大為228 MPa,小于材料的屈服極限。三角臂局部應力放大圖如圖6所示。為驗證仿真模型及分析方法的正確性,還需要進行應力試驗。根據有限元分析結果,選取圖5所示的幾個點位作為三角臂應變片的粘貼位置。
3 舉升機構三角臂結構強度測試試驗
3.1 舉升機構應變電測試驗系統
舉升機構應變電測試驗系統由數據測量、數據采集和數據處理系統組成,舉升機構應變電測試驗系統如圖7所示。
各測點的應變信號由應變傳感器通過武漢英泰斯特電子技術有限公司的16通道動態應變儀采集,并通過LabView軟件記錄在筆記本電腦中,采集后得到的應變信號采用北京東方振動和噪聲技術研究所的Dasp信號分析軟件進行處理。
依據有限元分析結果布置應變片位置,由于三角臂結構復雜,主應變方向難以確定,因此布置6個45°電阻應變花,三角臂應變花布置如圖8所示。
試驗采用的45°電阻應變花,其最大主應力σ1 和最小主應力σ2 分別為
σ1= E 2(1-μ) (εa+εc)+ E 2 (1+μ) (εa-εb) 2+(εb-εc) 2? (1)
σ2= E 2(1-μ) (εa+εc)- E 2 (1+μ) (εa-εb) 2+(εb-εc) 2? (2)
根據第四強度理論,得電阻應變花的等效應力為
σ= (σ1-σ2) 2 2 + (σ2-σ3) 2 2 + (σ3-σ1) 2 2? (3)
而對于平面問題,當σ3 =0時,化簡得
σ= E 2? (εa+εc) 2 (1-μ) 2 + 6 (1+μ) 2 [(εa-εb) 2+(εb-εc) 2]? (4)
式中,E為彈性模量;μ為泊松比;εa ,εb 和εc 分別表示0°,45°和90°這3個方向上的應變。
3.2 三角臂應力試驗結果與分析
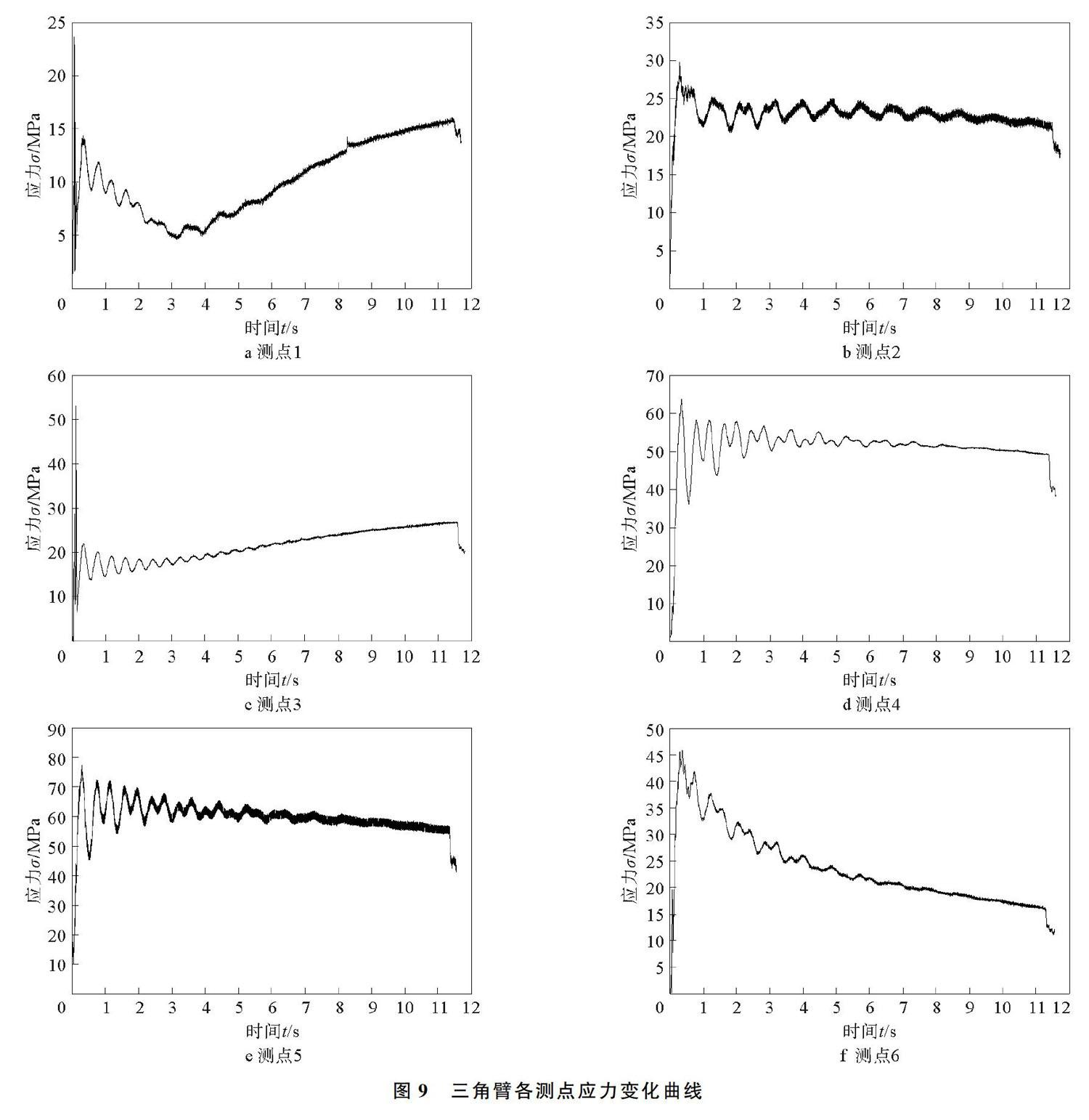
三角臂應力試驗在某專用汽車企業液壓試驗臺進行,采用不卸載的方式,舉升角為22°,裝載量為30 t。 實驗獲得各測點的應變,根據應力應變分析原理進行分析,三角臂各測點應力變化曲線如圖9所示。由圖9可以看出,在舉升過程中,各測點應力隨著舉升時間逐漸增加,達到最大值后減小,在0.35 s時,出現應力最大值(舉升角度為0.7°)。
3.3 有限元計算結果與試驗結果對比
試驗獲得了自卸汽車舉升三角臂各測點的應力最大值和有限元計算得到的應力數值,與有限元計算結果比較如表2所示。由表2可以看出,三角臂各測點的應力有限元計算值和試驗值非常接近,相對誤差為3.42%~15.55%。說明本研究所建立三角臂結構有限元模型和分析方法是正確的,很好地反映三角實際結構的強度特性,為三角臂結構的進一步改進和優化設計提供依據。
4 結束語
本文以某重型自卸汽車T式舉升機構為例,對自卸汽車舉升三角臂結構強度有限元模型進行研究。通過建立舉升機構虛擬樣機模型以及三角臂有限元分析模型,得到三角臂在其最大載荷工況下的應力分布,解決了舉升過程中極限應力分布區域難以確定的問題。為驗證所建仿真模型的正確性,對三角臂關鍵點位進行了應力試驗,仿真結果與試驗結果吻合度很好,表明所建立的仿真模型以及分析方法正確可行。研究結果為舉升機構的強度分析和結構的進一步改進提供參考依據。
參考文獻:
[1] 葛緒坤. 基于有限元和多體動力學的舉升機構疲勞壽命分析[D]. 青島: 青島大學, 2014.
[2] 陳德朋. 基于模態參數的白車身有限元模型修正[D]. 長沙: 湖南大學, 2018.
[3] 錢立軍, 吳陽年, 黃偉. 重型自卸車舉升結構件改進設計及分析[J]. 汽車工程, 2008, 30(1): 69 71.
[4] 葛緒坤, 樊維, 劉大維. 自卸汽車舉升機構應力實驗與分析[J]. 青島大學學報:工程技術版, 2014, 29(1): 56 59.
[5] 廖芳, 王承. 基于虛擬樣機與有限元技術的自卸車舉升機構設計[J]. 機械設計與制造, 2005(3): 90 97.
[6] 尹輝俊, 韋志林, 黃昶春, 等. 自卸車舉升三角臂的優化設計[J]. 農業機械學報, 2007, 38(9): 186 188.
[7] 孫旭. 自卸舉升機構的仿真和結構有限元優化[D]. 合肥: 合肥工業大學, 2008.
[8] 張毅, 馬力, 李鵬飛. 基于ADAMS的自卸車舉升機構優化設計[J]. 專用汽車, 2005(3): 21 23.
[9] 鄭清春, 朱培浩, 薄同偉, 等. 基于Working model自卸汽車舉升機構的動力學分析與研究[J]. 現代制造技術與裝備, 2008(4): 70 71, 74.
[10] 周陳霞, 曹芳芳. 基于虛擬樣機和有限元技術的舉升機構的設計[J]. 機械, 2013, 8(5): 26 29.
[11] 孫旭. 基于仿真的工程自卸車舉升機構有限元優化設計[J]. 工程機械, 2009, 40(7): 44 48, 7 8.
[12] 栗燦. 基于虛擬樣機的自卸車舉升機構優化設計研究[D]. 重慶: 重慶交通大學, 2014.
[13] 闞萍, 錢立軍, 黃偉. 自卸車舉升結構件改進設計及分析[J]. 合肥工業大學學報: 自然科學版, 2008, 31(1): 143 145, 157.
[14] 王樂寶. 基于虛擬樣機和有限元的側裝式垃圾車提升機構優化設計[D]. 青島: 青島大學, 2015.
[15] 唐焱, 李發琴, 肖蓬勃, 等. 基于試驗設計的自卸車舉升機構優化設計[J]. 煤礦機械, 2016, 37(3): 62 64.
[16] 毛勝輝. 基于最優化理論自卸車液壓舉升機構優化設計分析[J]. 機床與液壓, 2017, 45(10): 113 118.
[17] 唐云娟, 張斐朗. 礦用自卸車舉升機構的優化設計[J]. 裝備制造技術, 2019(2): 123 127.
[18] 劉大維, 劉偉, 孫海霞, 等. 公礦自卸汽車車架模態有限元及試驗分析[J]. 礦冶, 2007, 16(4): 66 68.
[19] 趙強, 孟祥瑞, 于世友, 等. 基于虛擬樣機的電動公交車充電弓裝置優化設計[J]. 現代制造工程, 2020(3): 54 59.
[20] 張忠清. 基于虛擬樣機的自卸車參數化研究與優化設計[D]. 南京: 南京農業大學, 2011.
Finite Element and Experimental Analysis of Strength of Dump Truck Lifting Triangle Arm
YUAN Wude1 , LUO Kun1 , YANG Chenglun2 , LIU Dawei1
(1. School of Electromechanic Engineering, Qingdao University, Qingdao 266071, China; 2. China National Heavy Duty Truck Group Qingdao Heavy Industry Co, Ltd, Qingdao 266031, China)
Abstract:? In order to analyze the structural strength of the triangular arm of a dump truck lifting mechanism, this paper takes a heavy dump truck T-lifting mechanism as an example and uses the multi-body dynamics analysis software Adams to establish a virtual prototype model of the lifting mechanism to obtain the lift. The force of each hinge point of the triangle arm of the mechanism is applied to the HyperMesh finite element analysis software to establish the finite element model of the triangle arm structure with the plate and shell element as the basic unit, and the structural strength under the maximum load condition is analyzed. In order to verify the correctness of the constructed finite element model, a strain electrical test system of the lifting structure is established, and the equivalent stress of the key points of the triangular arm is extracted. The research results show that the relative error of the key points between the finite element calculation results and the experimental test results is 3.42%~15.55%, which indicates that the established finite element model and analysis method of the triangular arm are correct and feasible. This research provides a reference for the strength analysis and structural improvement of the lifting mechanism.
Key words: dump truck; lifting mechanism; triangle arm; finite element; stress test
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18