基于LTE-V的車(chē)載V2X系統(tǒng)研究
2019-12-27 04:13:39楊波張瑩蔡之駿馮其高張志德
移動(dòng)通信 2019年11期
楊波 張瑩 蔡之駿 馮其高 張志德
摘要:隨著汽車(chē)保有量快速增長(zhǎng),交通問(wèn)題愈發(fā)嚴(yán)重,車(chē)聯(lián)網(wǎng)在智能交通領(lǐng)域作用越來(lái)越重要。立足于車(chē)聯(lián)網(wǎng)的定義和車(chē)載系統(tǒng)架構(gòu),著重介紹基于LTE-V的車(chē)載V2X系統(tǒng)設(shè)計(jì)關(guān)鍵技術(shù)和應(yīng)用,包括VBOX硬件設(shè)計(jì)和軟件設(shè)計(jì),最后對(duì)V2X系統(tǒng)進(jìn)行了實(shí)車(chē)驗(yàn)證,實(shí)驗(yàn)證明,當(dāng)遠(yuǎn)車(chē)沒(méi)有變道情況下預(yù)警準(zhǔn)確率可達(dá)到100%,當(dāng)遠(yuǎn)車(chē)存在不確定性變道的情況下,準(zhǔn)確率能達(dá)到90%以上。
關(guān)鍵詞:V2X;VBOX;硬件;軟件架構(gòu)
doi:10.3969/j.issn.1006-1010.2019.11.012? ? ? ? 中圖分類(lèi)號(hào):TN929.5
文獻(xiàn)標(biāo)志碼:A? ? ? ? 文章編號(hào):1006-1010(2019)11-0075-06
引用格式:楊波,張瑩,蔡之駿,等. 基于LTE-V的車(chē)載V2X系統(tǒng)研究[J]. 移動(dòng)通信, 2019,43(11): 75-80.
Research on the Vehicle V2X System Based on LTE-V
YANG Bo, ZHANG Ying, CAI Zhijun, FENG Qigao, ZHANG Zhide
(GAC Automotive Research & Development Center, Guangzhou 510000, China)
[Abstract]?With the rapid growth of car ownership and traffic problems, the role of Internet of vehicles (IoV) in the intelligent transportation is becoming increasingly important. Based on the definition of IoV and the vehicle system architecture, this paper focuses on the key technologies and applications of the V2X system design based on LTE-V, including the hardware and software design of VBOX. Finally, the experiments reveal that the system is stable to achieve the desired requirements. When the remote vehicle (RV) has not changed the lane, the warning accuracy reaches 100%, and when the RV intends to change the lane with uncertainty, the accuracy reaches more than 90%.
[Key words]V2X; VBOX; hardware; software architecture
0? ?引言
隨著汽車(chē)數(shù)量飛速增長(zhǎng),交通安全事故急劇上升,道路擁堵等問(wèn)題愈發(fā)嚴(yán)重,車(chē)聯(lián)網(wǎng)技術(shù)逐漸成為行業(yè)研究熱點(diǎn),通過(guò)車(chē)聯(lián)網(wǎng)實(shí)現(xiàn)車(chē)路人互聯(lián),可以顯著提高行車(chē)安全,優(yōu)化交通狀況,減少汽車(chē)能耗[1]。
車(chē)聯(lián)網(wǎng)功能等級(jí)可以分為四個(gè)階段,第一階段為網(wǎng)聯(lián)輔助信息交互,基于車(chē)—路、車(chē)—云通信,實(shí)現(xiàn)導(dǎo)航、道路狀態(tài)、交通信號(hào)燈等輔助信息的獲取以及車(chē)輛行駛與自車(chē)駕駛員操作等數(shù)據(jù)的上傳。第二階段為網(wǎng)聯(lián)協(xié)同感知,基于車(chē)—車(chē)、車(chē)—路、車(chē)—人、車(chē)—云通信,實(shí)時(shí)獲取車(chē)輛周邊交通環(huán)境信息及周邊各交通參與者和路側(cè)/云端的感知信息,與自車(chē)傳感器的感知信息融合,作為自車(chē)決策系統(tǒng)的輸入。第三階段為網(wǎng)聯(lián)協(xié)同決策,基于車(chē)—車(chē)、車(chē)—路、車(chē)—人、車(chē)—云通信,實(shí)時(shí)并可靠獲取車(chē)輛周邊交通環(huán)境信息及周邊各交通參與者和路側(cè)/云端的決策信息,與自車(chē)傳感器的感知信息融合,作為自車(chē)決策和控制系統(tǒng)的輸入。第四階段為車(chē)路云一體化協(xié)同控制,基于車(chē)—路、車(chē)—云通信,結(jié)合交通參與者、路側(cè)感知信息,路端/云端進(jìn)行全局優(yōu)化調(diào)度與控制,實(shí)現(xiàn)交通安全與效率最大化[2]。
當(dāng)前,正處于網(wǎng)聯(lián)輔助信息交互階段,國(guó)家相關(guān)網(wǎng)絡(luò)、標(biāo)準(zhǔn)和法規(guī)在逐步建立中[3],國(guó)內(nèi)外芯片制造商也已在研制滿足車(chē)聯(lián)網(wǎng)標(biāo)準(zhǔn)的LTE-V通訊芯片,已經(jīng)有相應(yīng)的模組或產(chǎn)品推出,可用于前期技術(shù)研究和演示,本文基于LTE-V通訊技術(shù)設(shè)計(jì)了一款車(chē)載V2X系統(tǒng)。
1? ?V2X車(chē)載系統(tǒng)設(shè)計(jì)
V2X車(chē)載系統(tǒng)主要由VBOX(V2X控制器)、天線、安全警示系統(tǒng)以及連接線束組成,其中天線包含4G天線、LTE-V天線和GNSS天線,安全警示系統(tǒng)集成在IVI(車(chē)載信息娛樂(lè)系統(tǒng))中進(jìn)行展示,并向駕駛員提供預(yù)警信息。
1.1? VBOX系統(tǒng)設(shè)計(jì)
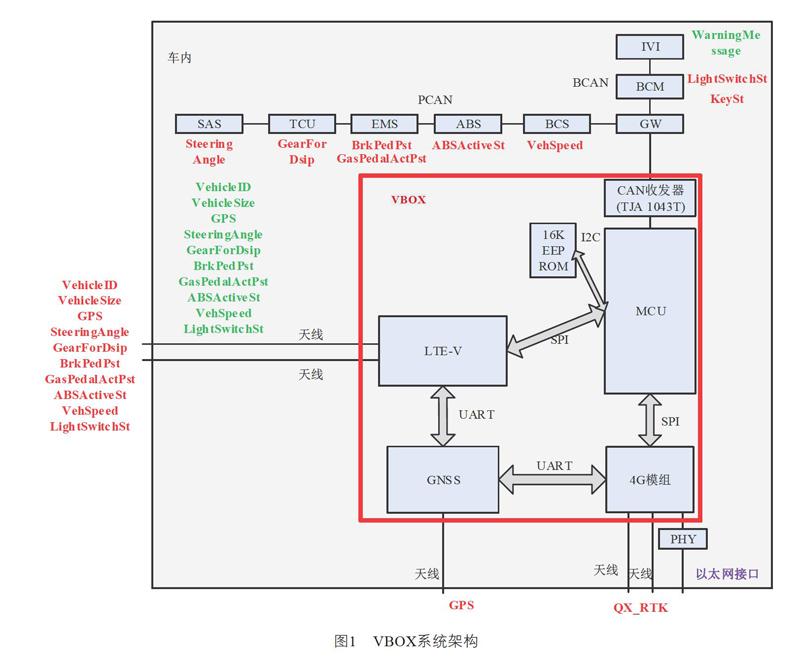
VBOX的系統(tǒng)架構(gòu)方案如圖1所示,主要由LTE-V模組、MCU、4G模組和高精定位模組組成,并且預(yù)留HSM承擔(dān)V2X信息安全的加解密。
(1)VBOX核心包括LTE-V通訊模組、4G模組、高精度定位模組和MCU。
(2)VBOX通過(guò)ACAN、BCAN和PCAN與車(chē)內(nèi)網(wǎng)連接,在車(chē)內(nèi)獲取SAS(方向盤(pán)角度傳感器)、GSM(換擋桿模塊)、EMS(發(fā)動(dòng)機(jī)管理系統(tǒng))、BCS(制動(dòng)控制系統(tǒng))、BCM(車(chē)身控制器)等節(jié)點(diǎn)的相關(guān)信號(hào)。
(3)MCU將總線上獲取的車(chē)速信號(hào)并通過(guò)SPI發(fā)送至4G模組,將輪速信號(hào)通過(guò)硬線發(fā)送至GNSS模組。
(4)通過(guò)4G模組上網(wǎng)獲取RTK信號(hào)、車(chē)速信號(hào)發(fā)送至高精定位模組計(jì)算高精度定位信號(hào)。
(5)通過(guò)LTE-V模組獲取其他車(chē)輛信號(hào)、并周期性地廣播本車(chē)信號(hào)。
(6)LTE-V模組接收GNSS的GPS信號(hào)、MCU的車(chē)內(nèi)信號(hào),通過(guò)應(yīng)用算法計(jì)算出預(yù)警信息并通過(guò)SPI發(fā)送至MCU,MCU將預(yù)警信息通過(guò)CAN總線發(fā)送至IVI顯示。
1.2? 天線匹配
天線用于實(shí)現(xiàn)V2X信號(hào)、GNSS信號(hào)、4G信號(hào)的接收和發(fā)射,基本功能如下:
(1)接收空間中的電磁波信號(hào),將其轉(zhuǎn)換為高頻電流信號(hào)并傳輸?shù)浇邮諜C(jī)上。
(2)將高頻電流信號(hào)轉(zhuǎn)變?yōu)榭臻g傳波的電磁波信號(hào)。
其中LTE-V天線指標(biāo)如表1所示:
將所有天線集成在鯊魚(yú)鰭內(nèi),并放置于車(chē)頂,可以提高天線的接收和發(fā)射性能,如圖2所示為與VBOX配合的鯊魚(yú)鰭天線:
1.3? 布置位置
從鯊魚(yú)鰭天線到VBOX的連接線纜應(yīng)盡量選用車(chē)規(guī)級(jí)高性能線纜,選取3組3.5 m長(zhǎng)的RG58LL線纜對(duì)不同頻段的信號(hào)進(jìn)行衰減測(cè)試,結(jié)果如表2所示,對(duì)高頻段信號(hào)平均每米衰減1.07 dB。
所以VBOX的布置位置應(yīng)盡量靠近鯊魚(yú)鰭,如圖3所示,將VBOX布置在車(chē)頂鈑金下方,可將鯊魚(yú)鰭與VBOX之間的線纜降低至20 cm以內(nèi),提高信號(hào)強(qiáng)度。
2? ?VBOX軟件設(shè)計(jì)
VBOX的軟件包括三部分,分別位于MCU、LTE-V模組和4G模組內(nèi),MCU負(fù)責(zé)VBOX的電源管理、CAN協(xié)議棧等,4G模組負(fù)責(zé)VBOX的上網(wǎng)功能,而V2X的核心功能均布置于LTE-V模組內(nèi)。
2.1? LTE-V模組軟件架構(gòu)
LTE-V模組內(nèi)的軟件可分為八部分,如圖4所示。
(1)LTE-V模組的SDK:包括Bootloader、Linux Kernel、PDCP、RLC、GNSS Driver、PPS Driver等6個(gè)模塊,其中Bootloader為AP的刷新提供支持,Linux Kernel包含SPI、UART等硬件驅(qū)動(dòng),PDCP和RLC為標(biāo)準(zhǔn)中定義網(wǎng)絡(luò)層二層協(xié)議棧,GNSS Driver調(diào)用UART驅(qū)動(dòng)使用NEMA協(xié)議接口,PPS Driver實(shí)現(xiàn)PC5模組與高精度定位模組之間的時(shí)間同步。
(2)Network Stack:符合標(biāo)準(zhǔn)的網(wǎng)絡(luò)層協(xié)議棧,包括DSMP、MLME&PLME、Network API。其中DMSP為標(biāo)準(zhǔn)網(wǎng)絡(luò)層報(bào)文協(xié)議。MLME&PLME為網(wǎng)絡(luò)層管理實(shí)體,對(duì)網(wǎng)絡(luò)層進(jìn)行內(nèi)部管理,一些管理可配置,由DME進(jìn)行配置服務(wù)。Network API為網(wǎng)絡(luò)協(xié)議棧的數(shù)據(jù)流(Data Plane)API接口。
(3)V2X Communication:該部分為V2X通訊層,主要包括Message Parser/Encoding,用于消息集ASN.1格式的編碼/解碼/解析/封裝。
(4)V2X Applcation Support:包括V2V Service、V2I Service、V2P Service等3個(gè)模塊,分別負(fù)責(zé)V2V、V2I、V2P3種服務(wù),處理服務(wù)邏輯。
(5)Vehicle Position Handle:該部分包括GPS Daemon和PPS Services兩個(gè)模塊,用于處理車(chē)輛位置信號(hào)。GPS Daemon抽象和提供GNSS位置服務(wù),對(duì)外提供高級(jí)定位服務(wù)API而不是低層的難于使用的NEMA協(xié)議接口。PPS Services提供OS內(nèi)的時(shí)鐘同步到GNSS時(shí)間。
(6)Vehicle Data Handle:該部分包括Vehicle Status Data、Caculate Data、Warning Data等3個(gè)模塊,通過(guò)SPI協(xié)議棧與整車(chē)CAN總線數(shù)據(jù)進(jìn)行交互。Vehicle Status Data為本車(chē)車(chē)輛狀態(tài)數(shù)據(jù),Caculate Data為V2X標(biāo)定數(shù)據(jù),Warning Data為計(jì)算后的預(yù)警數(shù)據(jù)。
(7)V2X Utility:提供基礎(chǔ)編程環(huán)境,提供定時(shí)器、基礎(chǔ)數(shù)據(jù)結(jié)構(gòu)、日志等。
(8)Hazard Detect:危險(xiǎn)檢測(cè)部分,包括Target Classification、PH&PP、FCW、ICW、LTA、BSW、DNPW、EBW、HLW、SLW、AVW、CLW、RLVW、VRUCW、Threat Arbitrator等15個(gè)模塊,其中Target Classification為目標(biāo)分類(lèi)(TC),負(fù)責(zé)將鄰居車(chē)輛分為17個(gè)車(chē)道級(jí)相對(duì)位置。PH&PP負(fù)責(zé)計(jì)算歷史路徑和軌跡,危險(xiǎn)仲裁(TA)負(fù)責(zé)場(chǎng)景危險(xiǎn)計(jì)算。
2.2? 前向碰撞預(yù)警
根據(jù)本車(chē)和遠(yuǎn)車(chē)的GPS數(shù)據(jù)計(jì)算兩車(chē)之間的距離d,并與兩車(chē)的碰撞距離DTC進(jìn)行判斷是否會(huì)發(fā)送碰撞事故。
rad(x)=x×π/180? ? ? (1)
(2)
(3)
其中X0和Y0為本車(chē)的經(jīng)緯度值,X1和Y1為遠(yuǎn)車(chē)的經(jīng)緯度值,V0為本車(chē)的車(chē)速,V1為遠(yuǎn)車(chē)的車(chē)速,T為駕駛員反應(yīng)時(shí)間,t1為制動(dòng)協(xié)調(diào)時(shí)間,t2為減速度增長(zhǎng)時(shí)間,d0為靜止時(shí)安全距離。
當(dāng)d 前向碰撞預(yù)警流程如圖5所示。 3? ?實(shí)驗(yàn)驗(yàn)證 為了驗(yàn)證該系統(tǒng)的穩(wěn)定性及預(yù)警準(zhǔn)確率,在某車(chē)型上搭載本文設(shè)計(jì)的V2X系統(tǒng)后,在特定園區(qū)內(nèi)分別進(jìn)行了7種不同場(chǎng)景各50次重復(fù)實(shí)驗(yàn)驗(yàn)證。 (1)RV在HV的左前方,如圖6所示: (2)RV在HV正前方,如圖7所示: (3)RV在HV的右前方,如圖8所示: (4)RV在HV的左前方,且RV通過(guò)方向盤(pán),即將并入HV正前方,如圖9所示: (5)RV在HV的右前方,且RV轉(zhuǎn)動(dòng)方向盤(pán),即將并入HV正前方,如圖10所示: (6)RV從HV的左側(cè)方超車(chē),且RV通過(guò)方向盤(pán),將并入HV正前方,如圖11所示: (7)RV從HV的右側(cè)方超車(chē),且RV通過(guò)方向盤(pán),RV將并入HV正前方,如圖12所示: 實(shí)驗(yàn)結(jié)果如表3所示,當(dāng)遠(yuǎn)車(chē)沒(méi)有變道情況下預(yù)警準(zhǔn)確率可達(dá)到100%,當(dāng)遠(yuǎn)車(chē)存在不確定性變道的情況下,準(zhǔn)確率能達(dá)到90%以上。 4? ?結(jié)束語(yǔ) 本文對(duì)LTE-V的車(chē)載系統(tǒng)進(jìn)行研究,最后在實(shí)車(chē)上進(jìn)行搭載驗(yàn)證前向碰撞預(yù)警,但仍缺少在彎道場(chǎng)景下的應(yīng)用驗(yàn)證。未來(lái)將進(jìn)一步進(jìn)行V2X算法探索,利用5G的低時(shí)延和高可靠特性對(duì)搭載V2X系統(tǒng)的車(chē)輛實(shí)現(xiàn)自動(dòng)駕駛控制。 參考文獻(xiàn): [1] 郝鐵亮,葉平,郝成龍,等. 車(chē)聯(lián)網(wǎng)技術(shù)研究[J]. 汽車(chē)實(shí)用技術(shù), 2017(20): 141-143. [2] 吳海,肖子玉. 蜂窩車(chē)聯(lián)網(wǎng)技術(shù)架構(gòu)與關(guān)鍵技術(shù)研究[J]. 電信工程技術(shù)與標(biāo)準(zhǔn)化, 2018(6): 11-16. [3] 鄒楓. 智能交通車(chē)路協(xié)同系統(tǒng)數(shù)據(jù)交互方式設(shè)計(jì)與驗(yàn)證[D]. 北京: 北京交通大學(xué), 2014. ★
