面向新一代智能交通系統的車聯網仿真技術
2019-12-27 04:13:39陳艷艷賈建林范博陳寧劉懿祺呂璇
移動通信 2019年11期
陳艷艷 賈建林 范博 陳寧 劉懿祺 呂璇
摘要:車聯網仿真技術是智能交通系統以及車聯網領域發展的重要測試手段,然而,已有的車聯網仿真平臺基于固定模型構建業務場景,如車輛跟馳模型、靜態業務優先級模型等,這種模型驅動的仿真方法難以適應新一代智能交通系統特征。因此,提出了一種數據驅動的車聯網仿真技術,基于海量路網信息數據、動態學習和標定典型智能交通場景下的業務特征,為車聯網仿真提供柔性動態的業務適配,滿足新一代智能交通系統需求。
關鍵詞:車聯網;新一代仿真技術;模型驅動;數據驅動
doi:10.3969/j.issn.1006-1010.2019.11.011? ? ? ? 中圖分類號:TN929.5
文獻標志碼:A? ? ? ? 文章編號:1006-1010(2019)11-0065-10
引用格式:陳艷艷,賈建林,范博,等. 面向新一代智能交通系統的車聯網仿真技術[J]. 移動通信, 2019,43(11): 65-74.
Vehicle Network Simulation Technology for New Generation Intelligent Transportation Systems
CHEN Yanyan1, JIA Jianlin1, FAN Bo1, CHEN Ning1, LIU Yiqi1, LV Xuan2
(1. College of Metropolitan, Beijing University of technology, Beijing 100124, China;
2. Hebei Provincial Communications Planning and Design Institute, Shijiazhuang 050011, China)
[Abstract]
Simulation technology of Internet of Vehicles (IoV) is an important test method for the development of intelligent transportation systems and IoVs. However, the current IoV simulation platforms establish service scenarios based on fixed models, such as vehicle following model, static service priority model, etc. This model-driven simulation method is difficult to support the characteristics of the intelligent transportation system in new generation. Therefore, this paper proposes a data-driven simulation technology of IoVs. Based on massive information data from road network, dynamically learning and calibrating the service characteristics of typical intelligent traffic scenarios, the proposed simulation technology provides flexible and dynamic service adaptation for vehicle network simulation to meet the requirements of intelligent transportation systems in new generation.
[Key words]Internet of Vehicles; new generation simulation technology; model-driven; data-driven
0? ?引言
車聯網技術的發展增強了汽車的智能化、信息化,提升了人們出行的便捷性、安全性與高效性,是傳統交通向智能交通轉變的重要環節[1]。新一代智能交通系統基于車路協同通信系統(C-V2X)以及車用傳感技術、DSRC專用短程通信技術等,實現了線路規劃、遠程控制、協助駕駛、交通信息采集等功能,不僅保障了出行的安全性,還提供了及時的出行服務信息等[2-4]。
車聯網的實質是一種移動自組織網絡,與典型的MANET模型不同,具有可預判性,能夠根據周圍環境信息為在途車輛提供不同的功能服務。但是,由于車聯網技術實驗需要大量車輛及復雜風險場景的輸入,導致室外實驗難以安全、有效獲取實驗數據,在此背景下,為克服這些限制,車聯網的實驗研究大多依賴于仿真技術[5-7]。車聯網仿真技術能夠基于真實路網拓撲結構、精確微觀移動模型和實際交通需求,模擬周邊車輛及復雜環境,實現復雜環境下的交通仿真。
但是,隨著“大數據”時代的到來,交通具有Volume(大量)、Velocity(高速)、Variety(多樣)、Value(低價值密度)、Veracity(真實性)等特性,雖然模型驅動的車聯網仿真技術在不斷的發展優化,但不能以真實的方式描述車輛移動性,同時忽略了細微的車輛交互細節,如因車輛密度的改變導致的車速加減變化等。因此,模型驅動的仿真方法[8-10]難以支持新一代智能交通系統特征。而數據驅動的車聯網仿真技術能提供多樣、準確的車輛移動數據,并基于海量路網信息數據,使車聯網仿真的精度提升到一個新高度,是未來車聯網仿真發展的重要趨勢。
基于上述背景,本文從車聯網仿真平臺的發展歷程出發,首先概括目前車聯網平臺的主要分類并介紹集中典型的車聯網仿真平臺;其次,結合中外文獻對仿真平臺所運用的模型進行研究分析;最后根據網絡以及車聯網發展的現狀,提出車聯網仿真技術發展的新思路。
1? ?車聯網仿真發展歷程
1.1? 車聯網仿真平臺分類
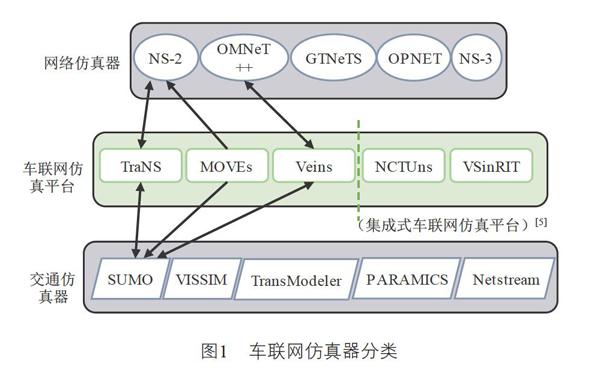
車聯網仿真需要兩種類型的仿真組件:網絡組件(網絡仿真器)和移動性組件(交通仿真器)。在大多數情況下網絡和交通仿真器是分開的,但也會出現結合兩者,可以獨立運行的集成式車聯網仿真平臺。車聯網仿真的分類結構圖如圖1所示。
交通仿真器生成所需要的現實車輛移動軌跡,作為網絡仿真器的輸入。網絡仿真器模擬無線網絡中的信息傳輸環境和網絡模型,如所有節點(汽車)的網絡拓撲結構、發送和接受數據包、數據流量傳輸或信道等[11]。
1.2? 仿真平臺介紹
目前使用的車聯網仿真軟件所得到的仿真結果很大程度上受到其所選擇的模型影響。現存車聯網仿真平臺主要有:
(1)TraNS
TraNS(Traffic and Network Simulation Environment)基于Java應用程序,通過鏈接SUMO交通仿真器以及NS2網絡仿真器,構建了更加真實的仿真環境,實現了SUMO與NS-2間動態信息的實時交互,是第一個開源的VANET仿真框架[12-13]。該仿真平臺具有提取車輛移動軌跡、地圖裁剪和場景重新縮放(僅適用于TIGER地圖)、大規模模擬(最多可測試3 000輛車)等功能。TraNS平臺有兩種操作模式分別為:以網絡程序為中心的模式和以應用程序為中心的模式,其體系結構如圖2、圖3所示,每種模式都滿足了特定的需求。其一,借助網絡程序,評估車輛節點的實時移動性;其二,借助應用程序,評估交通仿真運行期間的車輛行為。此外,TraNS可通過TraCI來耦合交通仿真器以及網絡仿真器,在網絡模擬器中實現停車、換道、改變速度等功能,體現了應用邏輯模塊與駕駛員行為模型模塊交互。
(2)MoVES
MoVES(Mobile Wireless Vehicular Environment Simulation)仿真平臺基于微觀仿真和網絡仿真為車聯網的研究提供了平臺,該框架可實現模塊化,具有適應性和準確性特點。在MoVES發展過程中,第二代框架是在第一代的基礎上實現了自適應計算,提高了仿真框架的可擴展性[12]。同時,該平臺使用并行式和分布式仿真器進行建模,解決了車輛自組織網絡(VANET)和ITS應用的結合。MoVES體系架構如圖4所示[11],共有三層:1)應用層;2)車輛層;3)網絡層。其中車輛層包括車輛模型、駕駛員行為模型、GPS地理信息系統、信號控制系統等。網絡層包括信息傳播模型、網絡協議等。
(3)Veins
Veins仿真平臺是基于開源框架[13-15]設計的,提供了耦合網絡的仿真。網絡仿真器基于OMNeT++開發,處理速度快,可以用于處理大型交通仿真。Veins通過雙向耦合的方法,可以實現道路網與信息控制系統的耦合,實現仿真器之間的動態交互[16],進而可以模擬車聯網通信對道路交通的影響。Veins的耦合仿真框架如圖5所示。
(4)NCTUns
NCTUns仿真平臺是一種網絡模擬仿真器,能夠模擬有線和無線IP網絡的各種協議,具有較強的可視化效果,可以模擬802.11a、802.11b、802.11g和802.11p技術[17-18]。該平臺由圖形用戶界面(GUI environment)、模擬引擎(simulation engine)、協議模塊(protocol modules)、模擬任務調度器(simulation job dispatcher)、任務協調器(coordinator)、內核修改(modified kernel)、協議守護程序(protocol daemons)、真實的應用程序(real-life application programs)八個功能部分組成[19]。與TraNS等仿真軟件不同,NCTUns可以將流量和網絡仿真器集成在一個模塊中,并提供反饋意見,支持車載網絡仿真。
(5)VSimRTI
VSimRTI是由德國柏林理工大學和克萊斯勒股份公司聯合創建的戴姆勒汽車信息技術創新研究所(DCAITI)開發的VANET仿真框架。VSimRTI采用了IEEE標準定義的建模與仿真高層體系結構,實現了多個模擬器之間的同步和通信。利用VSimRTI提供的網絡模擬器、交通模擬器、環境模擬器、應用模擬器接口,可以對車輛網絡的數據通信方案與算法協議進行充分評估。
2? ?模型驅動下的車聯網仿真
2.1? 移動模型
在車聯網仿真中,移動模型的準確性影響了車聯網仿真精確性及其設計性能[20-22]。仿真中節點(車輛)的移動會顯著影響網絡拓撲結構,因此精確的車輛移動模型可以提升車聯網仿真的置信度[23]。因此,車聯網移動模型成為目前研究的重點。
(1)交通流刻畫模型
根據刻畫對象的不同,可以將交通流刻畫模型分為宏觀、微觀和介觀三方面,具體分類結構如圖6所示。宏觀交通流模型針對交通量和初始車輛分布進行建模,并借鑒流體動力學理論,描述交通流總體特征。微觀移動模型將每一車輛作為獨立單元進行研究建模,可以獲得車輛的位置、速度、加速度等信息,反應了車輛之間的運動關系。微觀移動模型包括了車聯網仿真中常用的跟馳模型和換道模型,其中跟馳模型可準確反應真實交通現象、捕獲交通擾動影響、再現交通擁堵場景;換道模型可評估車輛換道情況并進行安全評價。介觀模型是宏觀移動模型和微觀移動模型間的折中方法。
(2)移動條件限制模型
根據移動模型在仿真中的條件限制以及移動特性,將移動模型分為隨機移動模型[24]、受限移動模型[25]以及混合移動模型[26],分類結構如圖7所示。隨機移動模型是最簡單直觀的移動模型,描述了移動網絡節點在二維區域內運動的行為,車輛隨機選擇目標點,其速度、運動方向也都隨機產生。但由于該模型為節點不均勻分布模型且不能描述群組移動,因此產生的仿真結果偏差較大,很少應用在車聯網仿真中。受限移動模型根據受限對象不同分為:時間條件移動模型,前一時刻的運動狀態(如速度、加速度等)會對當前移動產生影響;空間條件移動模型,節點的運動狀態與周圍節點密切相關,節點會受到鄰近節點的影響;地理條件移動模型,即為了模擬更真實的場景,在該模型里節點移動受到地圖中各種障礙物的限制。混合移動模型則是受限移動模型間相互組合形成的模型。
(3)真實軌跡移動模型
該模型在考慮了道路拓撲結構、速度控制等條件,進一步從模型、車輛真實行駛軌跡方面獲取節點運動數據并反應在車聯網仿真中,能夠較好地模擬車輛在真實環境中的行為。文獻[27]通過收集北京的出租車GPS數據,建立了基于真實軌跡的移動模型。文獻[28]通過獲取具有Wi-Fi網卡的公交車移動數據,生成節點的合成軌跡,然后建立仿真模擬。雖然真實軌跡移動模型能再現車輛的真實移動性及相互關系,但仿真性能比現有的其他移動模型要低,這是由于可利用軌跡數據少,不能全面反映道路車輛移動狀態所導致的。
2.2? 駕駛員行為模型
在車輛網仿真中,駕駛員行為的模擬和仿真的精度有密切的關系,是人車系統、智能車輛系統的關鍵。目前研究多基于駕駛數據,例如制動、油門踏板位置和方向盤角度等控制角度出發,提出了駕駛員行為的建模方法。駕駛員行為模型的建立可分為以下三個步驟[29]:
(1)驅動模型
建立基于駕駛員行為識別駕駛參數的模型結構,根據駕駛員模型結構的確定性和不確定性,從不同識別角度將識別方法分為參數識別、非參數識別和半參數識別三方面。驅動模型中包括了安全距離或碰撞避免模型(CA)、線性模型(Helly)以及基于模糊邏輯的模型、傅立葉系數法(FCM)等模型和數學方法。
(2)識別駕駛員行為特征
模型確定后,采用多種數學方法進行建模描述駕駛任務如跟馳、換道等,進而對駕駛行為識別。目前常用的駕駛行為識別方法有高斯混合模型(GMM, Gaussian Mixed Model)、過程混合模型(DPM, Dirichlet Process Mixture)、多層感知人工神經網絡(MLP-ANN, Multilayer Perceptron-Artificial Neural Network)、非線性和模糊理論等。
(3)基于驅動模型的評估與驗證
為了提高車輛動力學性能,設計智能化的駕駛員系統,需要評估和檢驗駕駛員行為模型的準確率,尤其在車聯網仿真系統領域。目前,大多數駕駛員行為模型從物理、數學理論角度出發,將通過駕駛參數分析得到模型放入仿真器中以識別駕駛員在某些駕駛任務(換道、跟車、制動等)中的駕駛行為、技能或狀態,但很少討論駕駛員心理和生理因素對駕駛員行為模型產生的影響[30]。然而目前車聯網平臺正處于向自動駕駛過度的階段,人-車系統中人的主觀意愿、行為將對駕駛產生決定性的影響。因此,研究人員將駕駛員行為模型研究應重點放在駕駛員心理、生理的研究上。
3? ?數據驅動下的車聯網仿真
3.1? 模型驅動存在的不足
目前,在車聯網仿真高保真度的研究中,大多數研究都是基于提升仿真模型的精確度。但是在現實中,存在著車聯網網絡拓撲結構的隨機性、駕駛人員的主觀認知以及交通流變化的隨機性等因素,上述模型在車聯網仿真中的運用具有較大局限性[31]。
(1)移動模型現存問題
目前,移動模型在車聯網仿真的應用仍然存在很多不足之處。文獻[32]指出,移動模型的流動性設置是把雙刃劍,如果節點快速移動,雖然能提升與其他節點的匯合以及信息交換,但同時也會減少接觸時間,從而限制在節點聯系中交換捆綁包的數量,限制數據傳輸。文獻[33]中說明,在針對不同場景使用移動模型時,都需要手動調整不同模型的參數以適應當前情景的網絡拓撲、移動限制條件等,使車聯網仿真的工作量變大。文獻[34]通過實驗證明,當使用曼哈頓模型車輛遇到障礙時,為了防止車輛重疊,將車輛速度瞬時降為零,這與實際情況有較大差異。此外,部分移動模型的節點存在非均勻分布現象。節點移動趨勢是向中心移動的,依賴于節點的運動參數,產生邊界效應,因此產生的仿真結果偏差較大。移動模型隨著研究的深入在不斷的改進和發展,但由于車輛移動存在實時性,交通流存在地域性,駕駛員駕駛存在主觀性,因此車輛網移動模型在模擬逼真的移動節點時仍面臨很大的挑戰。
(2)駕駛員行為模型現存問題
對于駕駛行為模型來說,駕駛汽車實際上是一項復雜的、動態的任務,要求駕駛員不僅要對駕駛員自身技能、駕駛員狀態、車輛性能和交通信息做出準確的認知和判斷,還要迅速反應、處理這些信息。因此,Liu和Salvucci[35]指出,駕駛員行為模型應該考慮到高級的認知處理和低級操作控制的特征。準確識別駕駛員行為、減輕駕駛員工作量并提高主動車輛安全系統對于車聯網仿真未來的發展是十分必要的。Macadam[36]從人類行為活動角度出發,指出人類具有非線性時間延遲和局限性的特征,但在人為因素領域仍存在一些物理限制。此外,目前現有的模型、系統大都是根據駕駛員的平均指標設計的,很少考慮駕駛員的個人特征。但在現實中,往往是具有個體特征的駕駛員的駕駛行為會影響道路交通的有序性以及個體車輛的安全性。因此,運用在現有車聯網仿真中的駕駛員行為模型,對駕駛員行為識別的敏感度、速度以及準確度都尚存在很大的提升空間。
3.2? 數據驅動下的仿真建模思路
(1)新數據源的驅動
隨著通信技術、計算機技術的發展,物聯網、互聯網、車聯網(車路協作)快速形成并廣泛應用,使交通系統進入智能網聯時代,人、車、路、環境、云端得以相連,智能網聯時代帶來的時空大數據,使得我們獲得海量移動運營商數據、交通數據等。以往的交通出行、管理受到傳統數據、模型及計算能力的局限制約,大數據的到來以及共享使我們能夠深入了解交通需求及供給(設施及服務)能力,并了解實時的交通現狀,這也是是構建并運行綜合交通網絡的前提。
目前,浮動車、手機、IC卡、眾包、網絡簽到等時空大數據實現交通系統全息監測,也可以將這些功能、數據應用到車聯網仿真中去,采用基于場景拆分和離散事件的在線精確仿真技術將整個復雜連續仿真場景拆分為多個簡單離散仿真場景,降低仿真復雜度,減少仿真時間。此外,可以通過視頻攝像頭提取車輛在面對擁堵等簡單場景時的行為和選擇,形成大數據場景庫,直接應用于仿真中,提高仿真精確度等。以下是車聯網仿真中大數據的三個應用方向:
1)出行軌跡監測——獲取真實交通流量
傳統的車聯網仿真中[37],利用目標場景和人口統計信息來確定適當的出行OD,運用路由分配算法來確定出行路徑,模擬代表性的交通流量。而大數據時代,可以基于手機信令數據提取用戶出行軌跡數據、分析用戶時空軌跡挖掘用戶時空出行特征,由此我們可以得到精確的用戶出行OD、出行路徑以便獲取真實的交通流量信息,能更好地描述不同區域的出行形態(如圖8所示的向心現象、局部聚集現象以及潮汐現象)。
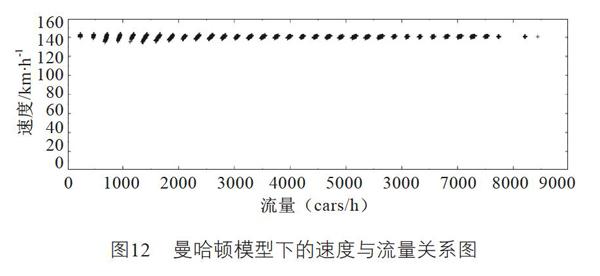
2)浮動車數據、交通流檢測——獲取實時路網信息及短時預測
交通流模型、隨機移動模型等常被用于車聯網仿真中,以獲取車輛速度、密度、流量等關系。隨著數據的共享,檢測技術的發展,我們可以通過交通流檢測獲得實時的車速、交通量、占有率等信息,即實現道路流量監測,如圖9至圖12所示。通過浮動車數據實時感知、估計道路網通行能力并動態控制進入流量,并將這些數據通過接口帶入到車聯網仿真中,提升了仿真的逼真度。
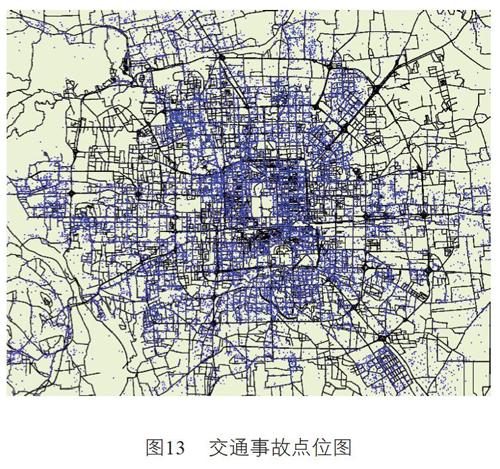
3)車輛事故數據、多數據源——獲取個體車輛數據
大數據背景下,可以結合高精度地圖和精準定位,將通過車道及個體車輛監控所獲得的數據接入車聯網仿真中,減少隨機事件影響,使節點保持適宜速度穩定行駛,準確仿真車流速度差及不良的變道行為,也可以實現基于多源數據的車輛運行狀態安全診斷和實時預警。此外,還可以獲得駕駛行為、車輛性能以及事故數據(如圖13所示),相對于通過傳統仿真模型,通過該方式獲得上述數據可信度更高。
綜上所述,大數據和5G時代的到來,為車聯網仿真的發展提供了新機遇,推進了車路協同系統的建設,適應了新一代智能交通系統的需求。在傳輸能力上,傳統的車聯網數據為單向傳輸,后臺匯聚,存在信息不對稱、傳輸寬帶及速度有限等問題。而智能交通條件下,數據雙向傳輸,信息共享、對稱,使多方合作機制的形成成為可能,傳輸速度也大幅提升。在決策能力上,傳統車聯網采用模型驅動的預案式調控決策,智能交通背景下采用數據驅動的決策模型能夠更加精細刻畫出行行為,為出行決策提供依據。
(2)數據驅動的仿真建模思路
傳統的數據來源主要是路上安裝的各類檢測器,如地埋式感應線圈、超聲波和激光檢測器、視頻等。這些數據的主要缺陷是覆蓋量小以致數據不能很好地反映路網全面的真實情況,這使得傳統建模方法多為model to data,這是在考慮到當時的數據現實狀況之下的無奈之舉。隨著實時傳感設備的普及,大數據已經成為目前各領域的必爭之地,數據量陡增,數據形式的不斷豐富使得交通仿真建模也開始發生相應的改變,由原來model to data變為data to model。
將大數據方法與數學模型相結合的思路將成為仿真科學發展的一個新機遇。構建數據驅動的仿真應用系統需要涵蓋多個組成部分,包括數據需求、數據采集、數據傳輸、數據耦合、模型校正等。因此,基于上述大數據帶來的新機遇,可以將數據驅動仿真框架梳理如圖14所示。通過各種感知設備獲取相應的大數據源,進行數據質量處理,得到合理有用的數據源。進而采用新的數據源結合新的方法如深度學習等構建交通仿真模型,并對各個參數進行校正,進而實現數據驅動下的仿真建模過程。
4? ?結束語
伴隨著網絡技術的發展,以人車路環境的全面精準感知及智能決策為核心,通過人—車—路互聯與協作,構建的可實現協同管控與創新服務的智能網聯交通系統成為交通發展的主要方向。車聯網仿真是該系統從理論研究到應用實踐的重要環節,因此,在過去的十年中,許多有關車聯網仿真的研究已在世界各地開展。本文中將車聯網仿真平臺劃分為交通仿真器、網絡仿真器以及集成仿真器三個部分,并介紹了幾種經典的仿真軟件及平臺。然后,分析歸納了當前主流的、能對車聯網仿真精度產生重要影響的交通仿真模型,并結合國內外文獻從節點移動、駕駛行為、網絡傳輸等方面分析了三類仿真模型存在的不足。最后,根據網絡發展以及車聯網仿真研究現狀提出了以大數據源為基礎的車聯網仿真發展方向,下一步應重點著手于大數據車聯網仿真的測試與優化。
參考文獻:
[1] E K Lee, M Gerla, G Pau, et al. Internet of Vehicles: From intelligent grid to autonomous cars and vehicular fogs[J]. International Journal of Distributed Sensor Networks, 2016,12(9).
[2] S Zeadally, R Hunt, Y S Chen, et al. Vehicular ad hoc networks (VANETS): status, results[J]. Telecommunication Systems, 2012,50(4): 217-241.
[3] F Batool, S A Khan. Traffic estimation and real time prediction using adhoc networks[C]//Emerging Technologies, Proceedings of the IEEE Symposium on. IEEE, 2005.
[4] I Leontiadis, C Mascolo. GeOpps: Geographical Opportunistic Routing for Vehicular Networks[C]//2007 IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks. IEEE, 2007.
[5] 王潤民,鄧曉峰,徐志剛,等. 車聯網仿真測試評價技術研究綜述[J]. 計算機應用研究, 2019,36(7): 1921-1926+1939.
[6] N Akhtar, S C Ergen, O Ozkasap. Vehicle Mobility and Communication Channel Models for Realistic and Efficient Highway VANET Simulation[J]. IEEE Transactions on Vehicular Technology, 2015,64(1): 248-262.
[7] S Zeadally, R Hunt, Y S Chen, et al. Vehicular ad hoc networks (VANETS): status, results[J]. Telecommunication Systems, 2012,50(4): 217-241.
[8] 鄒智軍. 新一代交通仿真技術綜述[J]. 系統仿真學報, 2010,22(9): 2037-2042.
[9] D R Choffnes, Bustamante, E Fabián. An integrated mobility and traffic model for vehicular wireless networks[C]//International Workshop on Vehicular Ad Hoc Networks. DBLP, 2005.
[10] J J Blum, A Eskandarian, L J Hoffman. Challenges of intervehicle ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2004,5(4): 347-351.
[11] S Olariu, M C Weigle. Vehicular networks: from theory to practice[M]. USA: Chapman and Hall/CRC, 2009.
[12] M Piórkowski, M Raya, A Lezama Lugo, et al. TraNS: Realistic Joint Traffic and Network Simulator for VANETs[J]. Acm Sigmobile Mobile Computing & Communications Review, 2008,12(1): 31-33.
[13] D Eckhoff, M Protsenko, R German. Toward an Open Source Location Privacy Evaluation Framework for Vehicular Networks[C]//Vehicular Technology Conference. IEEE, 2014.
[14] C Sommer, R German, F Dressler. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis[J]. IEEE Transactions on Mobile Computing. IEEE, 2011,10(1): 3-15.
[15] H Noori. Realistic urban traffic simulation as vehicular Ad-hoc network (VANET) via Veins framework[C]//2012 12th Conference of Open Innovations Association (FRUCT). IEEE, 2012.
[16] R Protzmann, K Mahler, K Oltmann, et al. Extending the V2X simulation environment VSimRTI with advanced communication models[C]//ITS Telecommunications (ITST), 2012 12th International Conference on. IEEE, 2012.
[17] 王雷. NCTUns:一種新的網絡模擬技術[J]. 計算機技術與發展, 2008,18(7): 80-82.
[18] S Y Wang, Y B. Lin NCTUns network simulation and emulation for wireless resource management[J]. Wireless Communications & Mobile Computing, 2005,5(8): 899-916.
[19] S Y Wang, H T Kung. Simple methodology for constructing extensible and high-fidelity TCP/IP network simulators[C]//INFOCOM ‘99. Eighteenth Annual Joint Conference of the IEEE Computer and Communications Societies. Proceedings. IEEE, 1999.
[20] J Harri, F Filali, C Bonnet. A framework for mobility models generation and its application to inter-vehicular networks[C]//International Conference on Wireless Networks. IEEE, 2016.
[21] 唐蕾,段宗濤,康軍,等. 面向車聯網環境的車輛移動模
型研究進展[J]. 長安大學學報:自然科學版, 2016,36
(5): 67-78.
[22] 顧海燕. 車聯網環境下高速公路車輛跟馳模型及仿真研究[D]. 南京: 東南大學, 2017.
[23] 石叢軍,任清華,鄭博,等. MANET節點移動模型仿真研究[J]. 計算機工程, 2009,35(14): 101-103.
[24] C Bettstetter. Smooth is Better than Sharp: A Random Mobility Model for Simulation of Wireless Networks[C]//Acm International Workshop on Modeling, Analysis, and Simulation of Wireless and Mobile Systems (MSWIM). ACM, 2001.
[25] C Bettstette, C Wagner. THE SPATIAL NODE DISTRIBUTION OF THE RANDOM WAYPOINT MOBILITY MODEL[C]//Mobile Ad-hoc Netzwerke, Deutscher Workshop ?ber Mobile Ad-hoc Netzwerke Wman. GI, 2002.
[26] T Islam, Y Hu, E Onur, et al. Realistic simulation of IEEE 802.11p channel in mobile Vehicle to Vehicle communication[C]//Microwave Techniques (COMITE), 2013 Conference on. IEEE, 2013.
[27] Y Weidong, L Jizhao, Z Xinyun. an trace based vehicular mobility model for simulation of vehicular delay tolerant networks[C]//Symposia & Workshops on Ubiquitous. IEEE Computer Society, 2010.
[28] X Zhang, J Kurose, B N Levine, et al. Study of a bus-based disruption-tolerant network: mobility modeling and impact on routing[C]//International Conference on Mobile Computing & Networking. DBLP, 2007.
[29] W Wang, J Xi, H Chen. Modeling and Recognizing Driver Behavior Based on Driving Data: A Survey[J]. Mathematical Problems in Engineering, 2014(1): 1-20.
[30] C Miyajima, Y Nishiwaki, K Ozawa, et al. Driver Modeling Based on Driving Behavior and Its Evaluation in Driver Identification[J]. Proceedings of the IEEE, 2007,95(2): 427-437.
[31] 程航. 基于車輛實際數據的車聯網仿真平臺的研究與開發[D]. 廣州: 廣東工業大學, 2016.
[32] L Peien, H Hongyu, S Wei, et al. Performance Evaluation of Vehicular DTN Routing under Realistic Mobility Models[C]//Wireless Communications and Networking Conference. IEEE, 2008.
[33] F J Ros, J A Martinez, P M Ruiz. A Survey on Modeling and Simulation of Vehicular Networks: Communications, Mobility, and Tools[J]. Computer Communications, 2014,43(1): 1-15.
[34] H?rri Jér?me, M Fiore, F Filali, et al. Vehicular mobility simulation with VanetMobiSim[J]. SIMULATION: Transactions of The Society for Modeling and Simulation International, 2011,87(4): 275-300.
[35] A Pentland, A Liu. Modeling and Prediction of Human Behavior[J]. Neural Computation, 1999,11(1): 229-242.
[36] Macadam, C Charles. Understanding and Modeling the Human Driver[J]. Vehicle System Dynamics, 2003,40(1-3): 101-134.
[37] S Uppoor, O Trullols-Cruces, M Fiore, et al. Generation and Analysis of a Large-Scale Urban Vehicular Mobility Dataset[J]. IEEE Transactions on Mobile Computing, 2014,13(5): 1061-1075. ★
