INDRA二次雷達TCPU板斷電重新裝載程序方法的研究
2019-12-26 11:57:58肖仁勝
微處理機 2019年6期
肖仁勝
(中國民用航空中南地區空中交通管理局湖北分局,武漢430000)
1 引 言
雷達作為空中交通管制的重要監視手段之一,其穩定、可靠運行是保障民航安全高效運輸的堅實基礎[1]。IRS-20MP/L 是一款由西班牙英德拉公司生產的具備S 模式功能的二次雷達[2]。該型雷達系統具備雙通道熱備份功能,主要功能是為其覆蓋區域內的空中交通管制員提供空中飛行器的實時動態監視信息。根據設備廠家維護手冊的相關要求,位于雷達系統錄取器部分的TCPU 板的IC 電池每隔5 年須更換,而板件的實時時鐘(Real Time Clock, RTC)和軟件重啟配置文件均存儲在其NVRAM 存儲器中,在電池更換過程中會全部丟失。因此,在更換該板件的IC 電池后,對TCPU 板重新裝載實時時鐘和軟件重啟配置程序,應采用何種方法,對恢復該部分原有功能尤為重要。同時,鑒于該雷達系統屬于進口設備,設備的備件采購、送修周期長[3],且價格昂貴,掌握TCPU 板IC 電池更換及其重新裝載程序的方法對于空管技術人員后續維護INDRA 二次雷達是有著迫切的必要性的。
2 錄取器組成及TCPU 板功能
2.1 錄取器的基本組成
IRS-20MP/L 詢問機是一個雙通道冗余系統,每個通道主要由S 模式發射機、發射機-接收機-天線接口單元、發射機電源、發射機風扇單元、多通道接收機單元、S 模式錄取器、S 模式錄取器風扇單元、S模式錄取器電源等部分組成[4]。
其中,S 模式錄取器單元負責接收并處理從接收機送來的視頻信號,并檢測SSR 與S 模式應答,生成所有目標的點跡信息,送至ATC 與雷達維護顯示器。此外,它還向發射機提供調制信號,必要時可以進行重復詢問。
錄取器由電源模塊、多通道接收機單元、構成雷達數據錄取器的數字電路組件板、錄取器風扇、測試面板等組成。其數字組件中的處理模塊MCPU包括TCPD、TDLS 和TCPU 三個部分。
TCPD 即控制與數字處理板,負責執行數字信號處理(應答檢測與譯碼)和對S 模式工作下的實時通道控制功能[5]。它具有一個強大的FPGA 處理器,包含10000000 個門電路和兩個嵌入式的Power PCO 處理器。
TDLS 是串行數據分配板,負責提供多種傳輸協議串行接口,包含兩個組成部分:串行數據輸出板TRLS 與串行數據分配適配器板TADLS;
TCPU 為中央處理器,它是基于單PowerPCO 芯片的處理器。
錄取器單元結構與組成如圖1 所示。
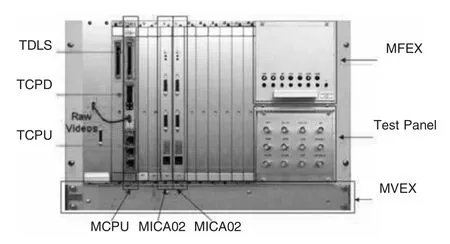
圖1 錄取器單元結構與各組成部分
2.2 TCPU 板基本功能
TCPU 板的功能主要有以下幾個方面[6]:
(1) 鏈路控制(LC):將FW-TCPD 板處理的SSR與S 模式應答信息發送給點跡生成單元。決定需要向飛機詢問哪些數據,并將其發送SW-TCPD(詢問調度功能);為系統提供必要的機制,對其功能進行監控。針對系統運行的過載情況進行監視,并針對過載情況對CAM(控制和監視)給出提示,如果產生過載,LC 將減少覆蓋距離,只對感興趣區域的目標進行處理。
(2) 處理所有從實時通道控制器(RTCC)發送來的SSR 與S 模式應答報告;對航跡與目標進行相關處理,包括假目標檢測與去除;以AST 格式輸出數據;生成控制選呼列表。
(3) 鏈路管理處理(LMP):控制除S 模式全呼詢問以外所有S 模式數據鏈路處理。
(4) 通信管理處理(CMP):處理所有從數據鏈路送來的數據鏈路交換服務請求。
(5) 監視協調單元(SCF):根據雷達站的設定規劃保證S 模式地面站有效工作,并盡可能減少射頻污染。通過正確使用II/SI 代碼、S 模式協議、應答機全呼鎖定、覆蓋范圍配置以及目標移交以避免地面站之間的相互干擾。
綜合上述分析,TCPU 板作為雷達數據處理部分的重要組成部分之一,其安全穩定運行是雷達發揮其自身功能的重要保障。因此,對TCPU 板IC 電池的更換及更換后重新加載相關程序的研究必然具有重大意義。
3 TCPU 板IC 電池更換及程序加載
3.1 TCPU 板IC 電池的更換
按照INDRA 雷達設備技術手冊的相關要求執行雷達單通道停機程序。取出MCPU 板,拔出TCPD與TDLS 兩個擴展板卡,用起拔器拔出TCPU 板上舊IC 電池,更換新電池。注意電池的安裝方向,電池一角的黑點標記在正確安裝時的位置如圖2 所示。
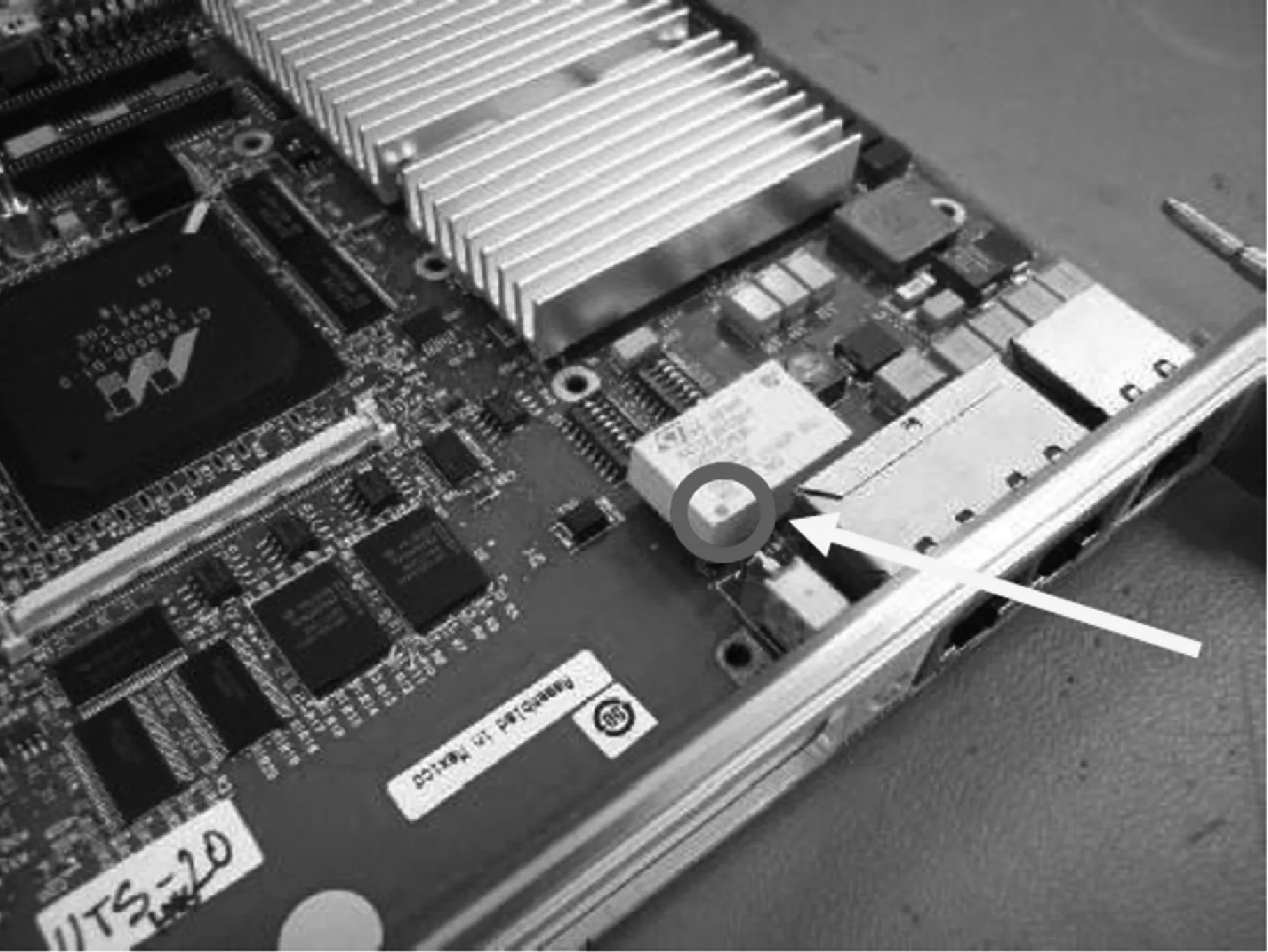
圖2 IC 電池安裝位置
3.2 TCPU 板程序加載
電池更換完成后,TCPU 板中RTC 和SW boot參數需要重新加載。加載這些參數需要采用串行通信方式,將PC 和TCPU 板通過RJ45/RS232 線連接在一起。各顏色線纜與不同端口引腳之間的連接方式如表1。

表1 加載參數時串行通信連線情況
然后進行J8 跳線設置,將TCPU 板上J8 的跳線由1—2 變為2—3 位置,如圖3 所示。
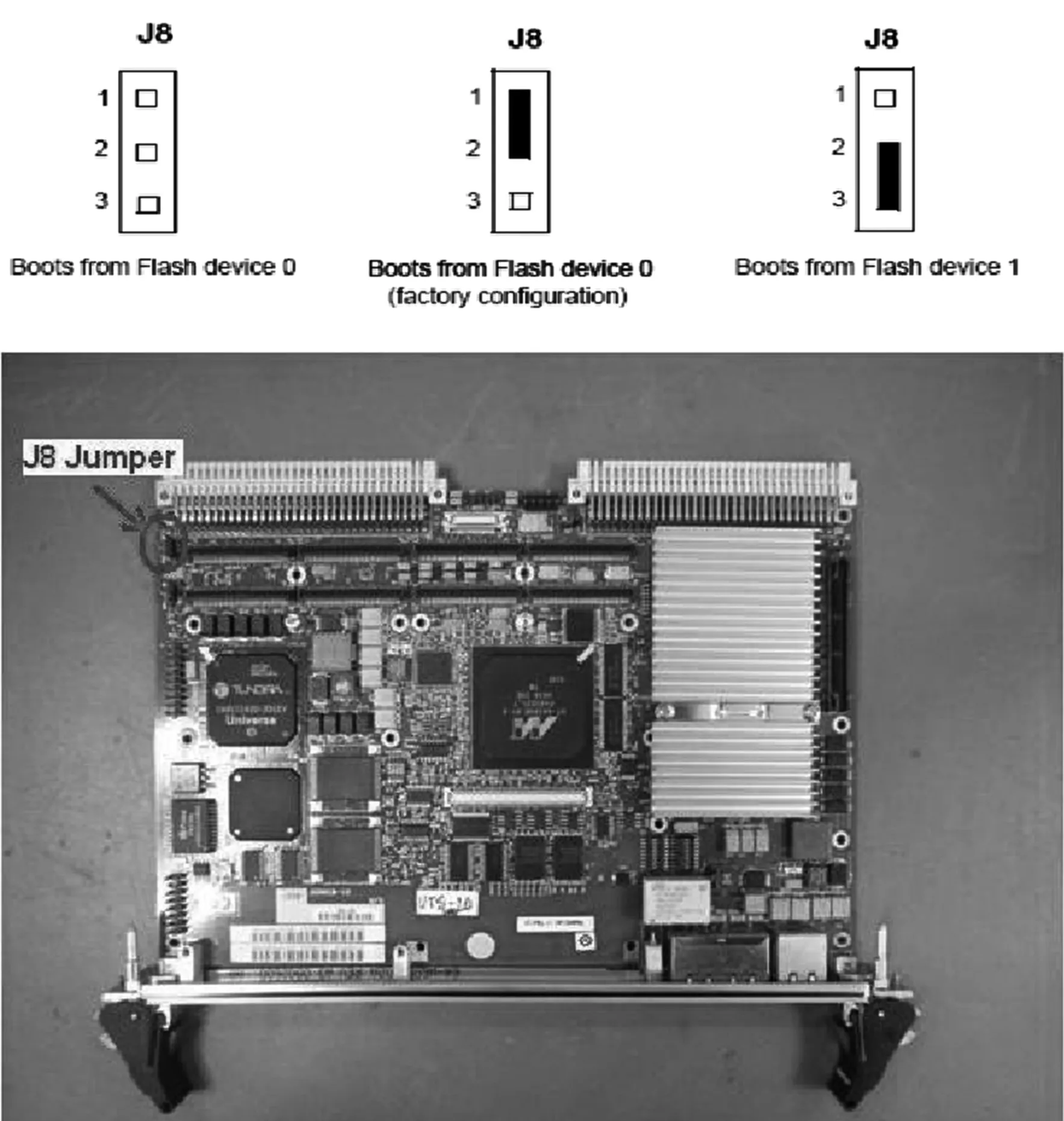
圖3 J8 跳線設置
將TCPU 板重新安裝到設備上,按照INDRA 雷達設備開機程序給TCPU 板加電。使用RJ45/RS232串口線纜中的RJ45 端連接TCPU 板前面板COM1端口[7],線纜另一端連接至PC 端串口。啟動PC 超級終端程序,設置完成后,將超級終端打開,連接成功后,在超級終端上會立刻顯示“MVME5500>”信息。如果不能顯示,通過呼叫顯示“MVME5500>”信息[8]。
如上信息正常顯示后,通過以下指令設置RTC時間:

注意“-d”“-t”之前要有空格。其中各關鍵字定義為:
MM:當前月份;
DD:當前日期;
YY:當前年份后兩位數字;
HH:當前時;
MM:當前分;
SS:當前秒(近似值)
例如輸入“set -d/dev/rtc -t111419152335”即設置為2019 年11 月14 日15 時23 分35 秒。時間設置完成之后,關閉系統,拔出TCPU 板,恢復J8 跳線的位置為1—2,上機至機柜,配置SW boot 參數。
系統開機后,在超級終端上顯示加載VxWorks System Boot 信息,片刻后,顯示“[VxWorks Boot]:”信息,此時輸入c,然后按Enter 鍵,并按照表2 加載SW boot 參數。
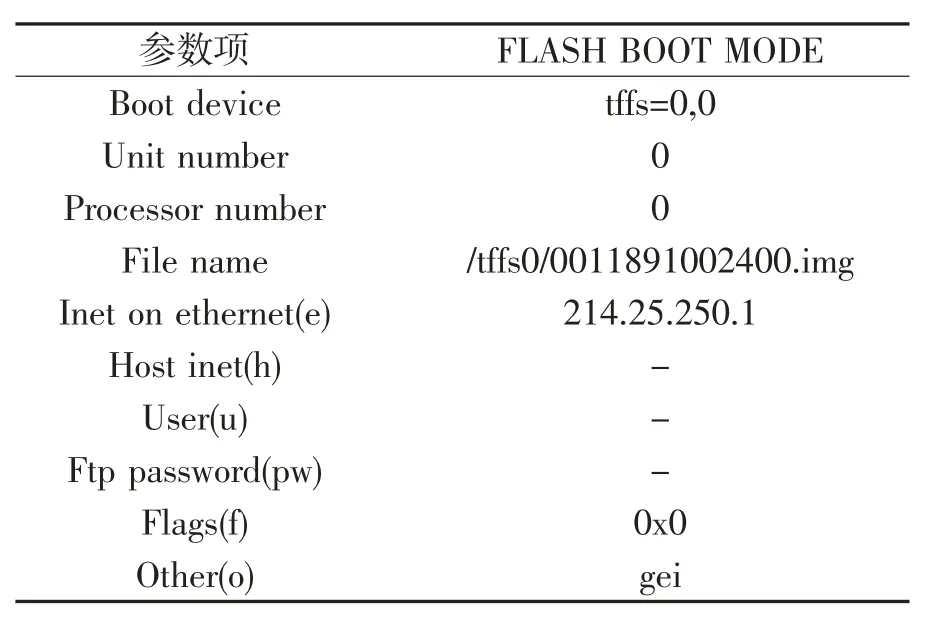
表2 SW boot 參數配置表
INDRA 雷達實際加載SW boot 參數的界面及詳細顯示情況如圖4 所示。
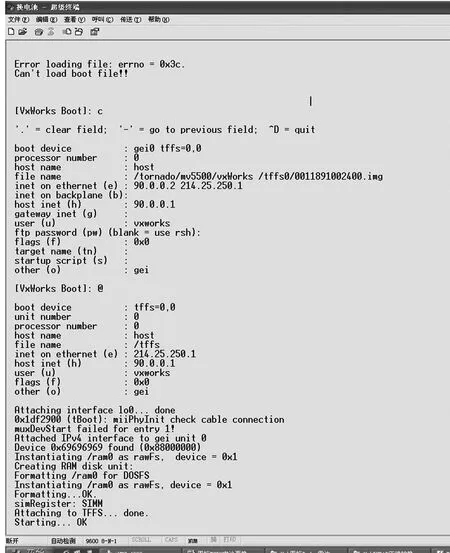
圖4 SW boot 實際加載圖
參數加載完成后,輸入@,按Enter 鍵,檢查Vx Works 參數開始刷新,進而最終完成整個TCPU 板程序加載。
4 結 束 語
INDRA 雷達中MCPU 板接收并處理從接收機送來的視頻信號,檢測SSR 與S 模式應答,生成所有目標的點跡信息并送至ATC 與雷達維護顯示器。TCPU 板作為雷達數據處理部分的重要組成部分之一,掌握其重要程序加載方法,無疑將為IRS-20MP/L 型雷達的維護提供重要的參考經驗,同時,該項技術的實際運用也將填補中部地區INDRA 雷達在該領域的空白,對同行業相關技術人員具有十分重要的參考價值。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
人大建設(2019年12期)2019-05-21 02:55:44
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
中國科技論壇(2017年7期)2017-07-25 08:49:53
環球時報(2017-03-30)2017-03-30 06:44:45
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年3期)2016-01-15 02:05:45
中國衛生(2015年3期)2015-11-19 02:53:32