基于ARM的采摘機械手運動控制及避障研究
2019-12-22 05:50:38王立謙
農機化研究
2019年2期
關鍵詞:系統
王立謙,吳 蕾
(武昌首義學院 機電與自動化學院,武漢 430064)
0 引言
近年來,隨著人工智能技術的日益成熟,我國不斷結合新技術推動農業機械化的發展,致力于減小與發達國家在農業現代化方面的差距。隨著農業機械化的不斷被重視和飛速發展,各種農業機器人逐漸進入市場,不僅改變了傳統的農業勞動方式,而且促進了現代農業的發展。本文對采摘機械手進行了位姿描述和運動學分析,并對機械手運動控制和避障進行了一定的前期理論研究,對設計出具有人工智能的采摘機器人具有一定的參考意義。
1 機械手運動學分析
機械手是采摘機器人的重要組成部分,是保證在復雜環境中開展整個采摘作業的綜合性剛體。采摘機械手包含多個可自動運動的關節,各關節都在其坐標系度量下進行運動,為果實的成功抓取提供了基礎。因此,在對采摘機械手運動控制及避障進行研究之前,必須提前對機械手位移、速度和加速度等運動學原理進行分析和研究。
圖1中,建立原點位于參考坐標系XYZ原點的向量圖,則該參考坐標系XYZ可以用3個向量組成的矩陣進行表示,其位姿描述方程式為
(1)
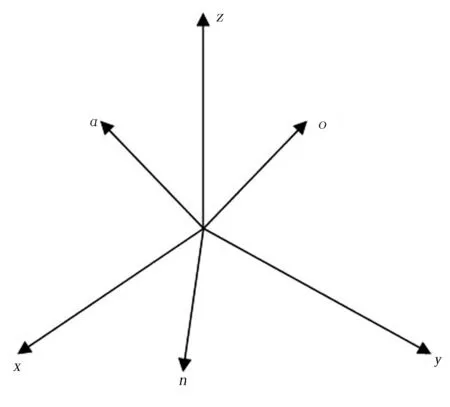
圖1 原點位于參考坐標系原點的向量表示圖
倘若原點不位于參考坐標系XYZ原點中,如圖2所示。
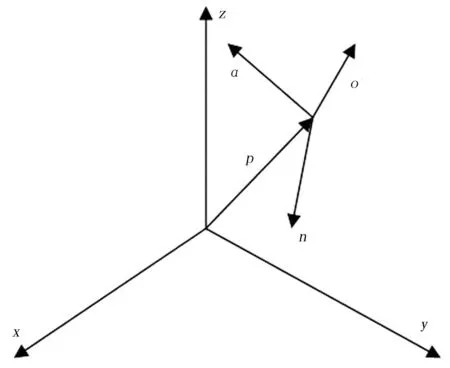
圖2 原點不位于參考坐標系原點的向量表示圖
則該參考坐標系XYZ可以用4個向量組成的矩陣進行表示,其位姿描述方程式為
(2)

結合前面的對采摘機械手位姿的描述,采摘機械手可以抽象為如圖3所示的坐標系。……
登錄APP查看全文
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年6期)2016-04-20 06:21:32
智能系統學報(2015年4期)2015-12-27 09:37:59