城市園林自動修剪機(jī)器人動力學(xué)仿真研究
2019-12-22 05:51:46李名地
農(nóng)機(jī)化研究 2019年2期
李名地
(廊坊職業(yè)技術(shù)學(xué)院,河北 廊坊 065000)
0 引言
隨著社會的不斷進(jìn)步,城市園林的發(fā)展日益更新。園林修整與管理的機(jī)器設(shè)備具有可操作性強(qiáng)、運動精度可控及工作效率高等優(yōu)點,目前在園林發(fā)展與建設(shè)中被廣泛應(yīng)用。近年來,根據(jù)園林建設(shè)的整體美觀與協(xié)調(diào),為充分提高園林修剪機(jī)器人的自動化程度,多位學(xué)者從修剪機(jī)器的機(jī)構(gòu)與控制角度出發(fā),分別利用多種理論對機(jī)器性能最優(yōu)化進(jìn)行研究改進(jìn),筆者在借鑒前人學(xué)者研究思路與理論的基礎(chǔ)上,對城市園林修剪機(jī)器人的自動化程度進(jìn)行分析,通過動力學(xué)理論模型建立與進(jìn)行仿真試驗,對自動修剪機(jī)器人展開研究。
1 整機(jī)原理及參數(shù)
園林修剪機(jī)器人是一種代替人工進(jìn)行園林枝葉修整與去除的有效作業(yè)機(jī)器,主要包括控制部件、攀爬部件、姿態(tài)調(diào)整部件、回轉(zhuǎn)機(jī)構(gòu)及末端執(zhí)行器等,其主要工作參數(shù)為機(jī)械臂的作業(yè)閾值、自由度及定位精度等,作業(yè)閾值通過有效銜接各個肢體關(guān)節(jié)的長度與行程問題確定。
針對機(jī)器人自由度問題,必須在合理的坐標(biāo)系之下建立各關(guān)節(jié)的空間結(jié)構(gòu)從而掌握機(jī)械人修剪末端執(zhí)行器的軌跡與定位;定位精度則由修剪機(jī)器人的自動化程度決定,通過編入指定的程序,在控制指令作用下,通過感知、傳遞、調(diào)節(jié)與執(zhí)行環(huán)節(jié)完成末端執(zhí)行器的合理運動與精準(zhǔn)定位環(huán)節(jié)。表1給出自動修剪機(jī)器人的D-H參數(shù)設(shè)計,定義了機(jī)器人各修剪作業(yè)關(guān)節(jié)的角度及長度,以確保各關(guān)節(jié)協(xié)調(diào)作業(yè)。

表1 自動修剪機(jī)器人D-H參數(shù)設(shè)計
2 動力學(xué)分析
2.1 工作空間
修剪機(jī)器人動力學(xué)工作空間作業(yè)決定機(jī)器人整機(jī)修剪效率,為避免機(jī)器人在作業(yè)過程中死點及作業(yè)死區(qū)缺陷,通過力學(xué)分析形成機(jī)器人的運動正、逆運動學(xué)程序及各關(guān)節(jié)角度的變化。園林自動修剪機(jī)器人工作空間流程簡圖如圖1所示。
2.2 動力學(xué)模型
根據(jù)園林農(nóng)藝特點及修剪機(jī)器人作業(yè)要求,建立修剪機(jī)器人在作業(yè)過程中的位移、速度、加速度及相關(guān)動力學(xué)模型,即

(1)
(2)
(3)
(4)
式中θd—機(jī)器人的位移;


Kp—動力學(xué)模型對角正定矩陣比例調(diào)節(jié);
Kd—動力學(xué)模型對角正定矩陣比例調(diào)節(jié);

H—動力學(xué)模型實際值計算矩陣;
N—動力學(xué)模型實際值計算矩陣。
修剪機(jī)器人穩(wěn)定性分析選用函數(shù)為
(5)
(6)
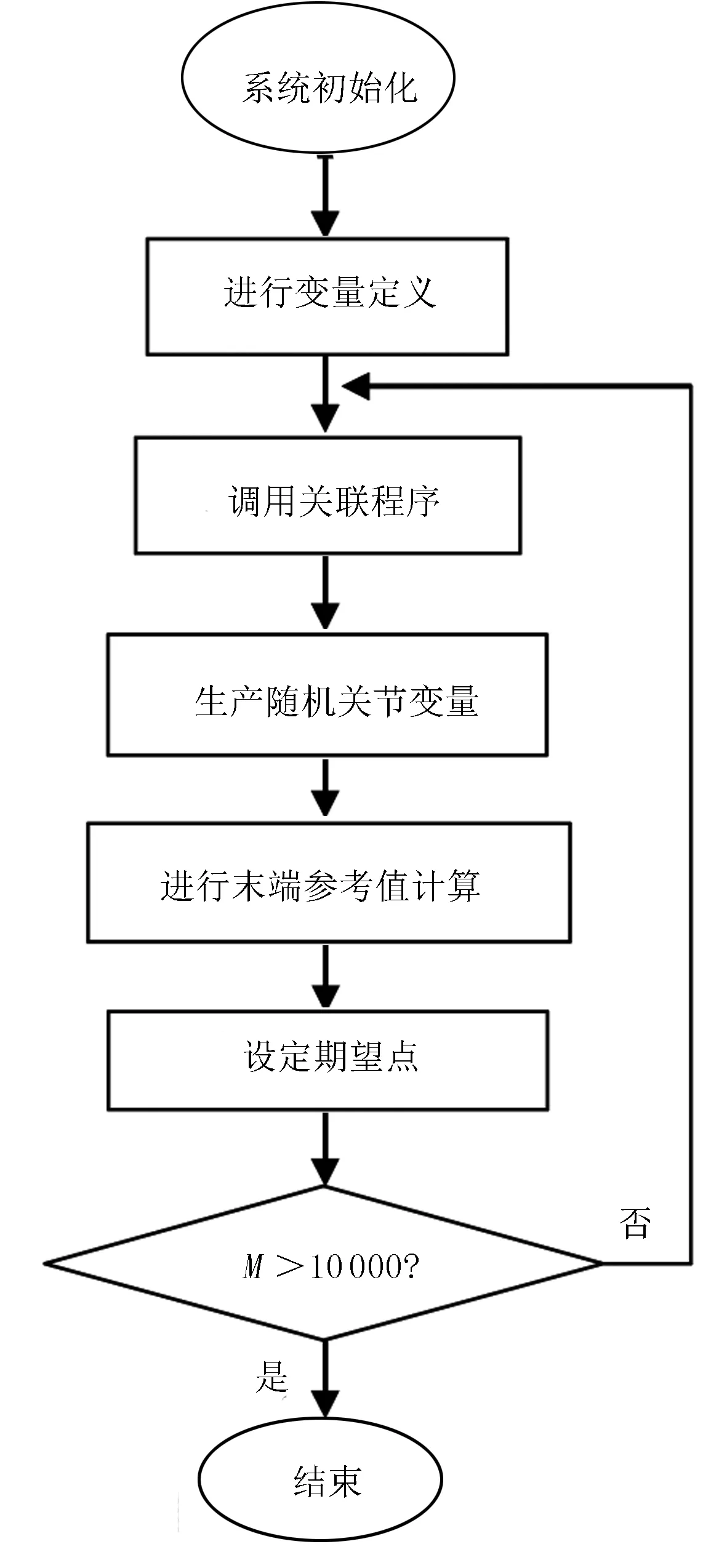
圖1 園林自動修剪機(jī)器人工作空間流程簡圖
依照理論模型,建立機(jī)器人作業(yè)關(guān)節(jié)流程,如圖2所示。修剪作業(yè)時,經(jīng)視覺單元采集與傳遞,末端執(zhí)行單元在控制系統(tǒng)的作用下依次進(jìn)行初步靠近與精細(xì)調(diào)整,最終到達(dá)修剪部位進(jìn)行持續(xù)作業(yè),此過程利用PD控制調(diào)節(jié)。
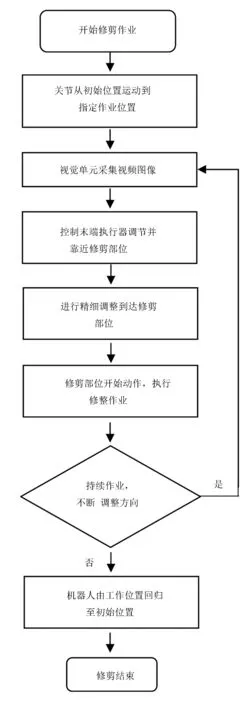
圖2 園林自動修剪機(jī)器人作業(yè)關(guān)節(jié)流程簡圖
2.3 驅(qū)動控制
修剪機(jī)器人驅(qū)動控制設(shè)計與應(yīng)用應(yīng)根據(jù)作業(yè)需求,利用函數(shù)控制關(guān)系(7)進(jìn)行作業(yè)控制,建立控制網(wǎng)絡(luò)輸入與輸出之間的對應(yīng)關(guān)系,實時對機(jī)器人修整作業(yè)的動作輸入、輸出進(jìn)行接收、調(diào)整與反饋。
y=WTσ(x) (x∈Rn,y∈Rm)
(7)
式中x—控制網(wǎng)絡(luò)輸入;
y—控制網(wǎng)絡(luò)輸出;
W—核心權(quán)值矩陣;
σ(x)—激活函數(shù)矢量。
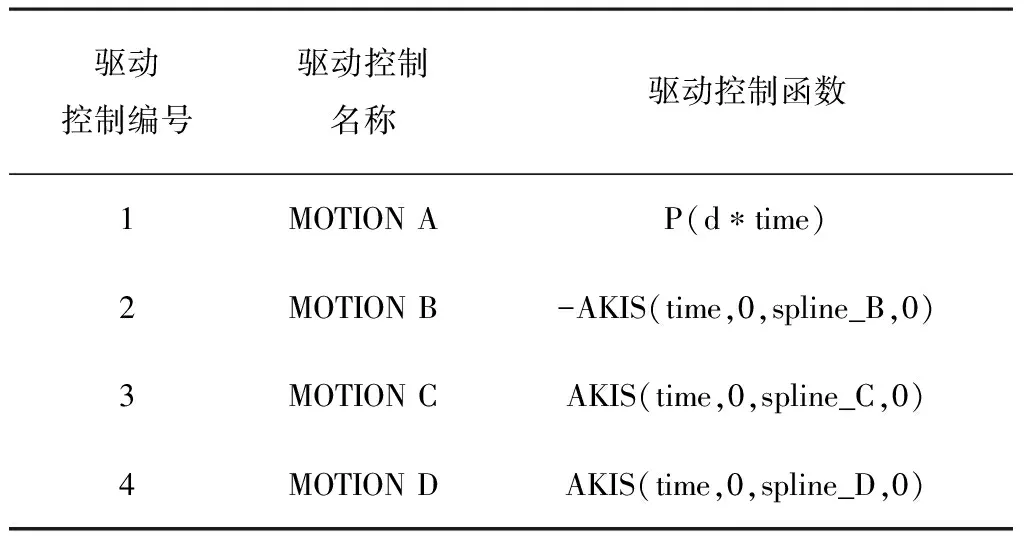
表2 自動修剪機(jī)器人驅(qū)動控制函數(shù)
依據(jù)機(jī)器人關(guān)節(jié)運動規(guī)律,給出驅(qū)動控制函數(shù)詳細(xì)代碼(見表2),并結(jié)合自動修剪機(jī)器人控制系統(tǒng)結(jié)構(gòu)簡圖(見圖3),通過驅(qū)動控制與下位機(jī)程序控制,開關(guān)量輸出至修剪機(jī)器人各運動執(zhí)行部件開展修剪作業(yè);各個關(guān)節(jié)加裝智能傳感器應(yīng)用裝置,保證傳遞數(shù)據(jù)及信號的準(zhǔn)確性與及時性,且可進(jìn)行遠(yuǎn)程調(diào)控。

圖3 城市園林自動修剪機(jī)器人控制系統(tǒng)結(jié)構(gòu)簡圖
3 仿真試驗
3.1 試驗前置要求
對修剪機(jī)器人運動軌跡進(jìn)行仿真試驗,分別考慮直線修剪與圓弧修剪,均建立在X0-Z0平面,軌跡方程分別為
(8)
同時,建立模型并通過剛度與性能指標(biāo)綜合求解,通過多次優(yōu)化要素及調(diào)整參數(shù),建立近似優(yōu)化模型,進(jìn)而給出經(jīng)多目標(biāo)函數(shù)優(yōu)化的理論參數(shù)范圍,即
(10)
(11)
3.2 試驗分析
為深入了解自動修剪機(jī)器人在不同修剪高度作業(yè)要求下所需匹配的控制電機(jī)性能,仿真試驗設(shè)定修剪高度作為變化參數(shù),從而記錄控制電機(jī)的功率與角度變化情況,如表3所示。由表3可知:在廣泛應(yīng)用的修剪高度變化400~500mm范圍時,電機(jī)各項參數(shù)能夠較好地保持穩(wěn)定性能,轉(zhuǎn)動角度在可控可達(dá)閾值內(nèi),電控裝置仿真表現(xiàn)良好。
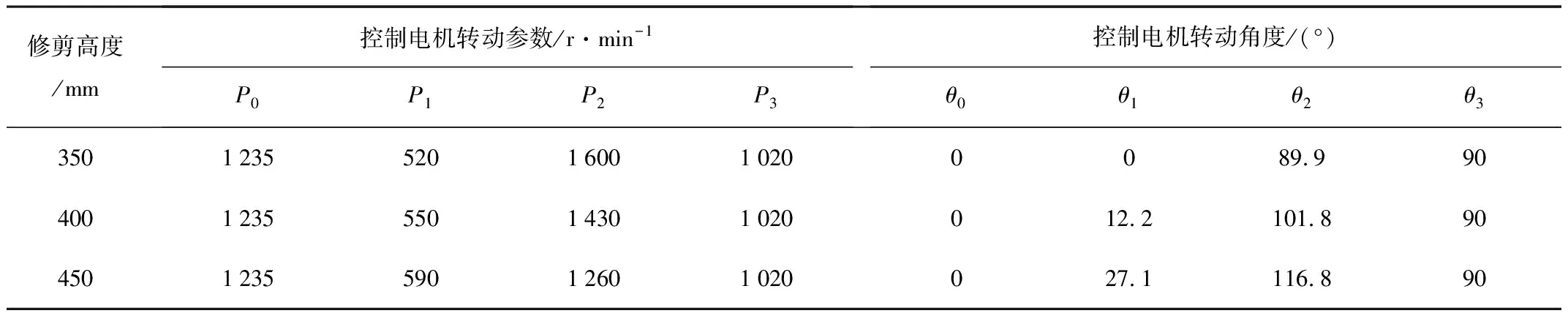
表3 自動修剪機(jī)器人不同修剪高度對應(yīng)控制電機(jī)參數(shù)

續(xù)表3
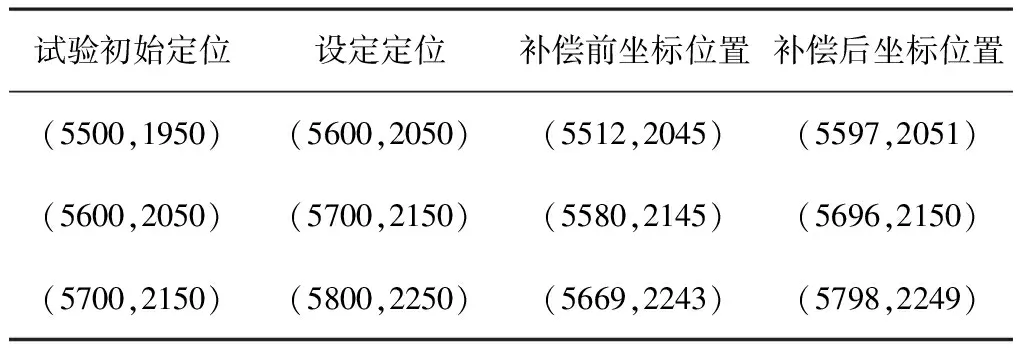
為進(jìn)一步提升自動修剪機(jī)器人的定位及補(bǔ)償功能,在仿真試驗加入定位及補(bǔ)償裝置,同時編入補(bǔ)償程序進(jìn)行控制與調(diào)整,結(jié)果如表4所示。由表4的10組數(shù)據(jù)可看出:初始定位的實際作業(yè)修剪位置,經(jīng)定位補(bǔ)償器修正后的位置坐標(biāo)更為準(zhǔn)確,誤差控制在6%左右。
經(jīng)試驗并不斷變化參數(shù)驗證,記錄與分析繪制特征參數(shù)曲線。圖4為機(jī)器人仿真試驗主關(guān)節(jié)1的角度運動變化曲線,圖5給出自動修剪機(jī)器人扭矩變化仿真曲線。由曲線變化可知:左右方位變化角度互補(bǔ)且扭矩配合一致性較好,試驗效果良好。
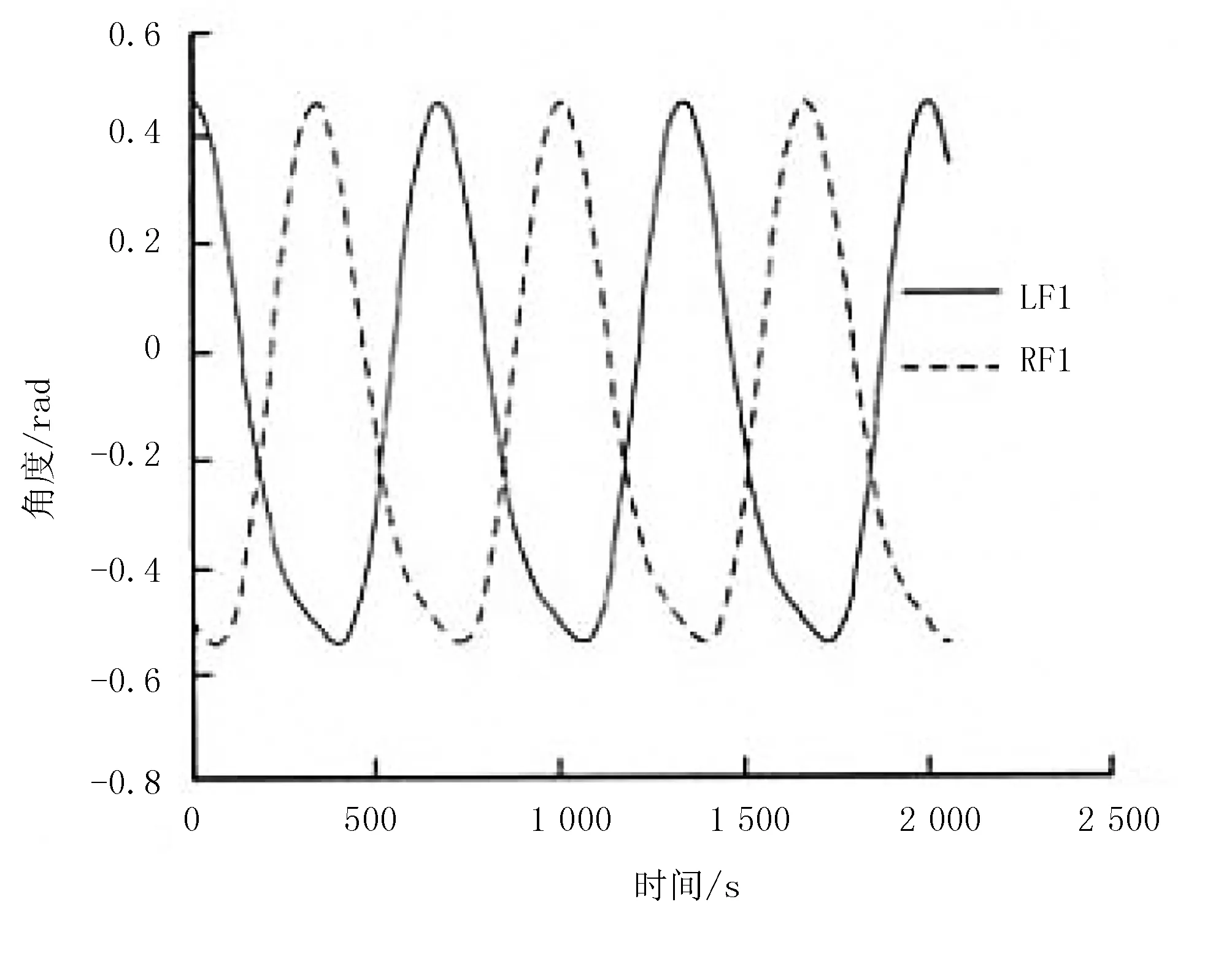
圖4 自動修剪機(jī)器人角度仿真曲線

表4 自動修剪機(jī)器人定位及補(bǔ)償試驗數(shù)據(jù)記錄
續(xù)表4
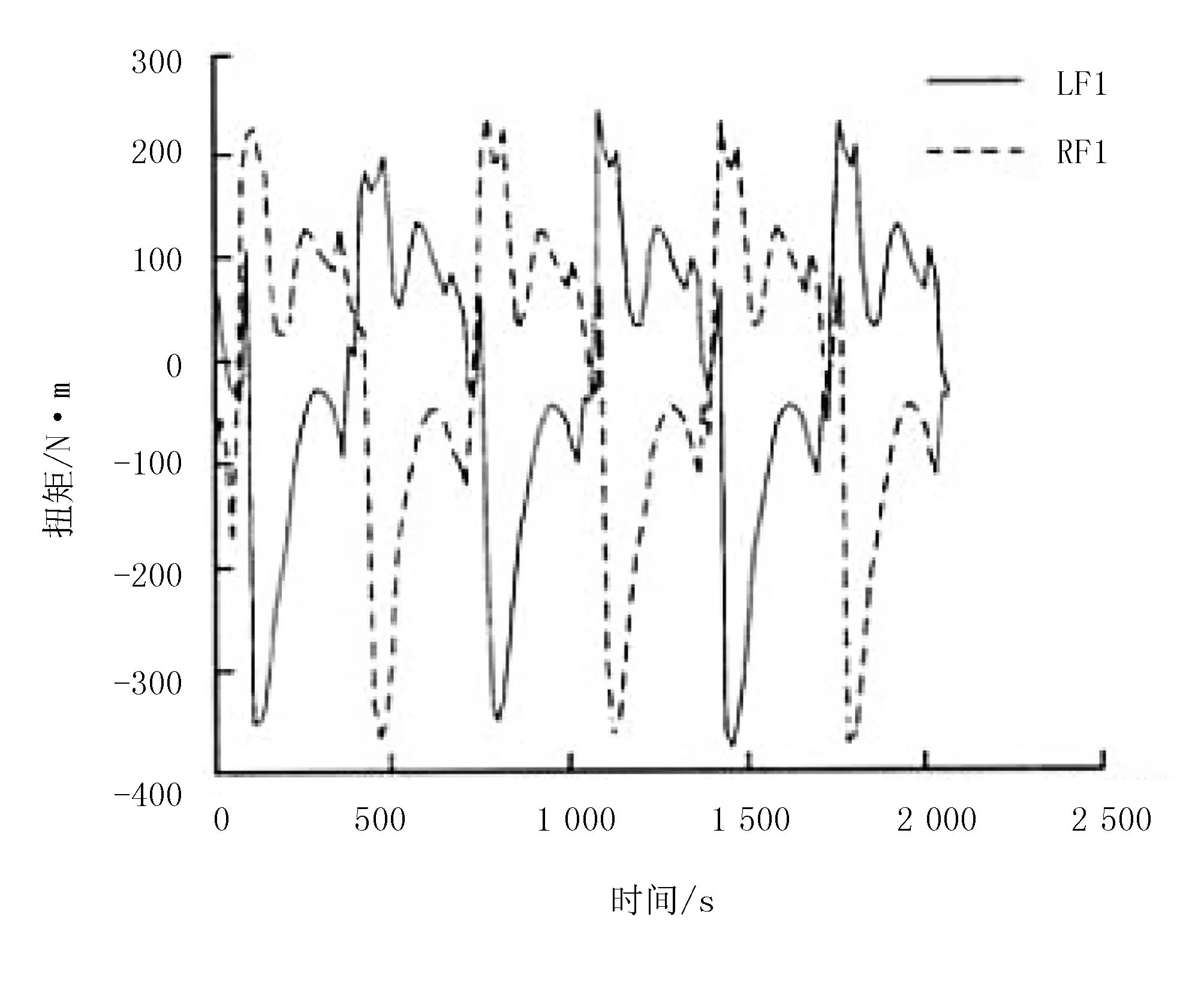
圖5 自動修剪機(jī)器人扭矩仿真曲線
4 結(jié)論
1)在自動修剪機(jī)器人整機(jī)的結(jié)構(gòu)及修整原理的基礎(chǔ)上,通過分析機(jī)械人各修剪部位的動力學(xué)運動規(guī)律,加入驅(qū)動智能控制,使得修剪機(jī)器人各關(guān)節(jié)協(xié)調(diào)運動良好。
2)經(jīng)多次目標(biāo)函數(shù)優(yōu)化,獲取自動修剪機(jī)器人的運動參數(shù),并利用機(jī)構(gòu)的運動定位與補(bǔ)償功能,實現(xiàn)修剪機(jī)器人各關(guān)節(jié)作業(yè)定位的準(zhǔn)確性,定位誤差控制在6%左右,使得園林修剪機(jī)器人按照既定的設(shè)計進(jìn)行修剪,效果良好。
3)結(jié)合運動學(xué)規(guī)律,對城市園林自動修剪機(jī)器人的動力學(xué)進(jìn)行仿真試驗,記錄了各關(guān)節(jié)臂的運動角度與作業(yè)過程中的扭矩變化情況,為解修剪部件的承載力與實際運動軌跡跟蹤提供一定的理論參考,有利于相似修剪機(jī)器人的開發(fā)與改進(jìn)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
兒童故事畫報(2013年3期)2013-06-24 05:40:30