偏航對(duì)預(yù)測(cè)零轉(zhuǎn)彎半徑割草機(jī)連續(xù)翻滾特性的影響
2019-12-22 05:43:36王新彥袁春元佘銀海
農(nóng)機(jī)化研究 2019年2期
關(guān)鍵詞:模型
葉 燁,王新彥,袁春元,佘銀海,張 權(quán)
(江蘇科技大學(xué) 機(jī)械學(xué)院,江蘇 鎮(zhèn)江 212000)
0 引言
零轉(zhuǎn)彎半徑割草機(jī)(Zero Turning Radius Mower)可以實(shí)現(xiàn)原地轉(zhuǎn)彎且工作效率高,因此常應(yīng)用于斜坡、洼地等復(fù)雜工作環(huán)境。隨著ZTR割草機(jī)的廣泛應(yīng)用,安全事故也不斷出現(xiàn),對(duì)于ZTR割草機(jī)駕駛安全性的要求也日益提高。
農(nóng)用車(chē)輛安全性的研究主要集中在農(nóng)用車(chē)輛初始失穩(wěn)、失穩(wěn)后非連續(xù)翻滾特性及失穩(wěn)后連續(xù)翻滾特性上。1971年,Larson和Liljedahl[1]發(fā)展了一種數(shù)學(xué)模型,模擬了拖拉機(jī)側(cè)翻并預(yù)測(cè)側(cè)翻發(fā)生條件。2009年,Mashadi和Nasrolahi[2]發(fā)明了一種控制系統(tǒng),通過(guò)建立拖拉機(jī)斜坡側(cè)翻模型分析其橫向穩(wěn)定性,并改變拖拉機(jī)重心位置以防止翻滾。1974年,Davis和Rehkugler[3]發(fā)明了具有10自由度的三維拖拉機(jī)模型,通過(guò)主軸角速度來(lái)量化拖拉機(jī)翻滾運(yùn)動(dòng)。1979年,Chisholm[4-6]根據(jù)力和位移的平衡方程建立了一個(gè)數(shù)學(xué)模型,描述了拖拉機(jī)的斜坡穩(wěn)定性。
在割草機(jī)連續(xù)翻滾特性的研究上的進(jìn)展包括:1973年,Schwanghart[7]建立了農(nóng)用拖拉機(jī)連續(xù)翻滾特性的動(dòng)力學(xué)原始模型,該模型被作為帶有翻滾保護(hù)裝置的農(nóng)用拖拉機(jī)的測(cè)試標(biāo)準(zhǔn)(OECD CODE6[8]);2002年,美國(guó)農(nóng)業(yè)工程學(xué)會(huì)采納已存在的OECD標(biāo)準(zhǔn)作為前驅(qū)割草機(jī)翻滾保護(hù)裝置的設(shè)計(jì)標(biāo)準(zhǔn)(ASAES547[9])。真正涉及割草機(jī)連續(xù)翻滾特性研究的是Wang[10]和Ayers[11]在拖拉機(jī)連續(xù)翻滾預(yù)測(cè)模型基礎(chǔ)上,將割草器尺寸及由割草器寬度引起的初始偏航加入了模型,并且分析了割草器尺寸對(duì)翻滾性能的影響。
該領(lǐng)域存在的問(wèn)題:割草器寬度不僅引起初始偏航,而且產(chǎn)生動(dòng)態(tài)偏航。實(shí)驗(yàn)研究表明:動(dòng)態(tài)偏航對(duì)于準(zhǔn)確預(yù)測(cè)在斜坡上作業(yè)的ZTR割草機(jī)的連續(xù)翻滾特性有著較大影響。
為了準(zhǔn)確預(yù)測(cè)ZTR割草機(jī)在斜坡上的連續(xù)翻滾特性,依據(jù)國(guó)際最新標(biāo)準(zhǔn)ISO 21299-2009[12],首先建立了動(dòng)態(tài)偏航和滑移動(dòng)力學(xué)方程;然后將動(dòng)態(tài)偏航和滑移加入了Wang的連續(xù)翻滾模型,并修正了該模型;最后,以ZTR割草機(jī)為對(duì)象實(shí)驗(yàn)驗(yàn)證修正后模型的正確性,并分析了偏航對(duì)連續(xù)翻滾特性的影響。
1 基于偏航的ZTR割草機(jī)連續(xù)翻滾特性預(yù)測(cè)模型
前期的研究發(fā)現(xiàn),由于ZTR割草機(jī)的割草器安裝在中間(見(jiàn)圖1),其橫向失穩(wěn)后的運(yùn)動(dòng)特性發(fā)生了變化。動(dòng)態(tài)偏航是影響割草機(jī)翻滾特性的重要因素之一,本預(yù)測(cè)模型的目的就是建立動(dòng)態(tài)偏航與割草機(jī)的翻滾特性之間的定量關(guān)系,最終獲得停止割草機(jī)連續(xù)翻滾的翻滾保護(hù)裝置臨界高度(Critical ROPS Height,簡(jiǎn)稱CRH)。
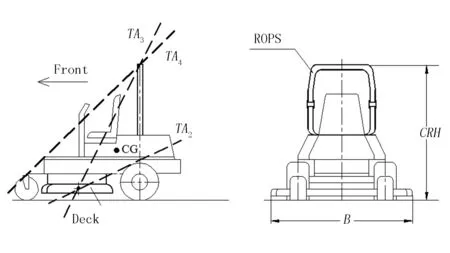
圖1 割草器位置及其兩個(gè)轉(zhuǎn)動(dòng)軸的定義
1.1 偏航的定義
割草機(jī)橫向失穩(wěn)到ROPS觸地后,割草機(jī)發(fā)生滑移、翻滾、偏航和俯仰4種運(yùn)動(dòng)的合成運(yùn)動(dòng),屬于6自由度復(fù)雜運(yùn)動(dòng)。為分析偏航對(duì)割草機(jī)連續(xù)翻滾的影響,本文建立了一個(gè)ROPS觸地后割草機(jī)偏航初始模型,如圖2所示。其中,割草機(jī)偏航分為初始偏航和動(dòng)態(tài)偏航。圖1中,割草器觸地后首先繞轉(zhuǎn)動(dòng)軸TA2(Tipping Axis 2)轉(zhuǎn)動(dòng);隨著翻滾的繼續(xù),ROPS(翻滾保護(hù)裝置)碰撞到地面,地面下陷;隨后,割草機(jī)繞著TA3(Tipping Axis 3)轉(zhuǎn)動(dòng)。
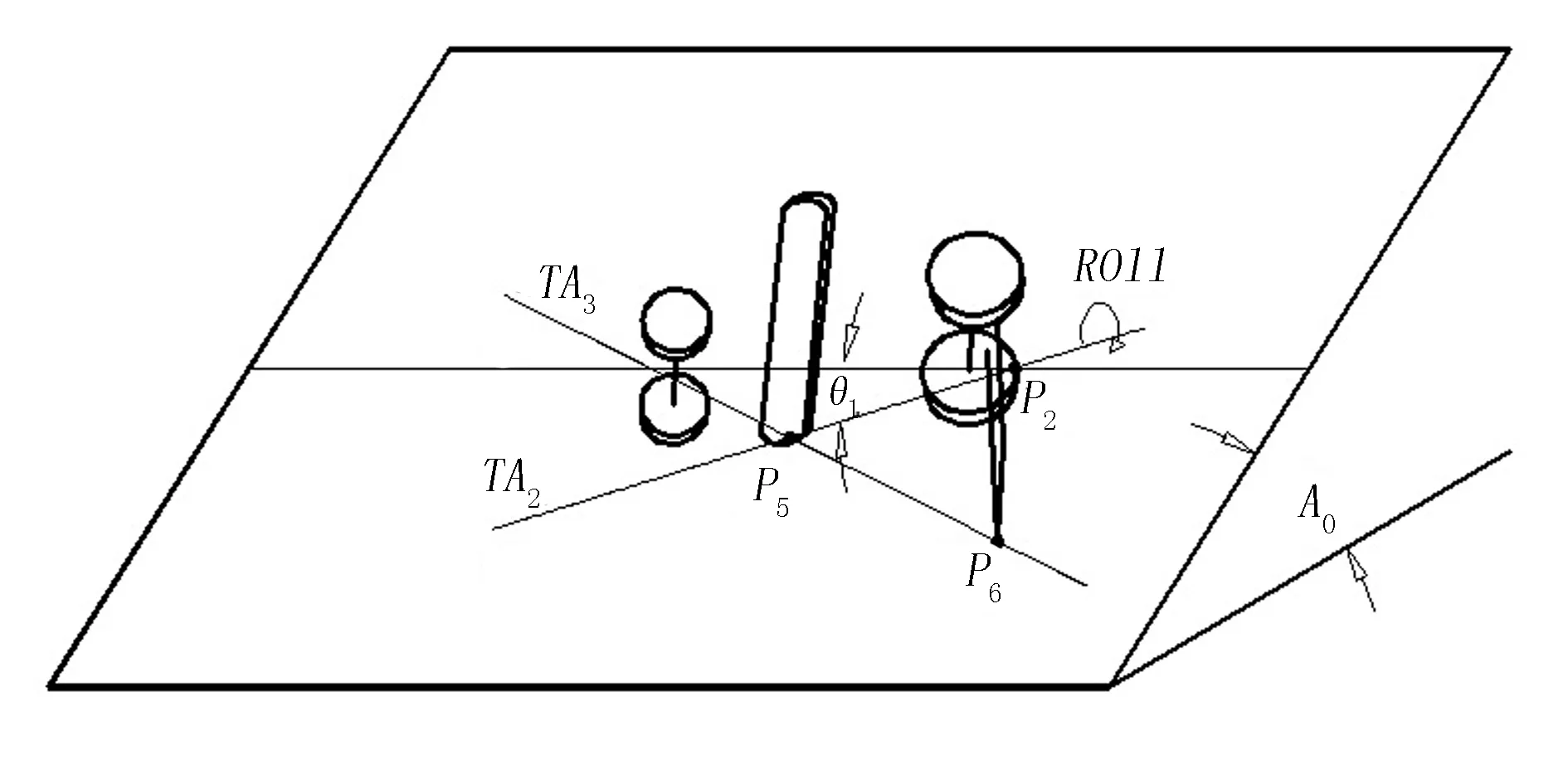
圖2 偏航初始模型

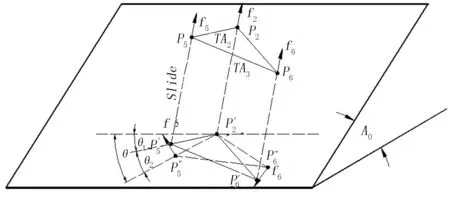
圖3 ZTR割草機(jī)動(dòng)態(tài)偏航和滑移運(yùn)動(dòng)分解示意圖
為了建立ZTR割草機(jī)斜坡偏航初始模型,做以下假設(shè):
1)忽略兩次翻滾之間瞬時(shí)的俯仰和翻滾運(yùn)動(dòng);
2)忽略割草機(jī)各非線性因素,將割草機(jī)看作一個(gè)整體;
3)忽略油箱油位對(duì)動(dòng)態(tài)偏航和滑移過(guò)程中對(duì)割草機(jī)重心位置和運(yùn)動(dòng)的影響;
假定偏航過(guò)程中輪胎與草地的摩擦力系數(shù)μ4、割草器和ROPS與草地的摩擦力系數(shù)μ56為常數(shù)。
1.2 割草機(jī)動(dòng)態(tài)偏航和滑移力學(xué)模型
為分析ZTR割草機(jī)動(dòng)態(tài)偏航和滑移特性,對(duì)ZTR割草機(jī)偏航初始模型進(jìn)行簡(jiǎn)化受力分析,可得ZTR割草機(jī)動(dòng)態(tài)偏航和滑移力學(xué)模型,如圖4所示。
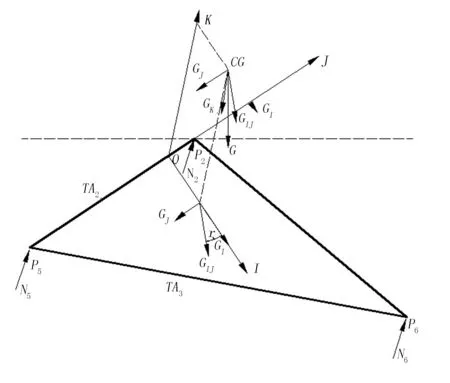
圖4 ZTR割草機(jī)動(dòng)態(tài)偏航和滑移力學(xué)模型
根據(jù)所建立的力學(xué)模型可知:ZTR割草機(jī)Z方向受力平衡,繞X軸力矩平衡,繞Y軸力矩平衡。平衡方程為
GK=N2+N5+N6
(1)
(2)
(3)
GK=mg×cosA0
(4)
GIJ=mg×sinA0
(5)
GI=GIJ×cosθ1
(6)
GJ=GIJ×sinθ1
(7)
式中A0—初始位置斜坡坡度角;
θ1—翻滾軸線TA2與水平線夾角(即初始偏航角位置)。
P2、P5和P6點(diǎn)處正壓力方程為
(8)
1.3 第一步分運(yùn)動(dòng)(割草機(jī)滑移)
正如前面所假設(shè)的,為了研究問(wèn)題,將割草機(jī)的失穩(wěn)后的運(yùn)動(dòng)分為兩步,即沿斜坡滑移和純動(dòng)態(tài)偏航。下面首先研究第1步分運(yùn)動(dòng),即沿斜坡的滑移(無(wú)偏航)。

(9)
式中Fs—割草機(jī)滑移合力;
a—割草機(jī)滑移加速度。
將式(8)代入式(9),即可得割草機(jī)滑移加速度a(t)方程。
同時(shí),可得滑移距離Ls(t)方程為
(10)
(11)
滑移距離是后續(xù)割草機(jī)翻滾特性的研究重要參數(shù),如求割草機(jī)滑移過(guò)程中損失的能量計(jì)算、割草機(jī)動(dòng)能和勢(shì)能的變化計(jì)算等。
1.4 第二部分運(yùn)動(dòng)(割草機(jī)動(dòng)態(tài)偏航)
由于ZTR割草機(jī)在側(cè)翻碰撞時(shí)存在沖量,使ZTR割草機(jī)質(zhì)心速度發(fā)生變化,導(dǎo)致ZTR割草機(jī)將發(fā)生動(dòng)態(tài)偏航。結(jié)合圖4,可得ZTR割草機(jī)動(dòng)態(tài)偏航時(shí)的動(dòng)力學(xué)方程為
GI×t=m×(V2-V1)
(12)
系統(tǒng)因沖量而增加的動(dòng)能為
(13)
(14)
式中V1—側(cè)翻碰撞時(shí)質(zhì)心速度的分量,垂直于J軸,平行于斜面;
θ2—?jiǎng)討B(tài)偏航角。
2 連續(xù)翻滾模型修正
2.1 動(dòng)態(tài)偏航和滑移能量損失修正
割草機(jī)失穩(wěn)后擁有的動(dòng)能越少,其連續(xù)翻滾的趨勢(shì)越小,駕駛員的傷亡率也越低,因此準(zhǔn)確預(yù)測(cè)割草機(jī)動(dòng)態(tài)偏航和滑移時(shí)的能量損失尤為重要。
ZTR割草機(jī)動(dòng)態(tài)偏航和滑移時(shí)的能量損失,主要是摩擦力做功損失的能量。根據(jù)ZTR割草機(jī)動(dòng)態(tài)偏航和滑移運(yùn)動(dòng)分解,將能量損失分解為滑移時(shí)摩擦力做功損失能量Es及偏航時(shí)摩擦力做功損失能量Ey。滑移時(shí)摩擦力做功為
(18)
偏航時(shí)摩擦力做功為
(19)
E損=Es+Ey
(20)
2.2 質(zhì)心速度修正
ZTR割草機(jī)動(dòng)態(tài)偏航和滑移發(fā)生在割草機(jī)繞TA2翻滾至P6觸地發(fā)生沉陷后(此時(shí)割草機(jī)重心線速度為V1)與割草機(jī)準(zhǔn)備繞TA3翻滾之前(此時(shí)割草機(jī)重心線速度為V3),如圖5所示。所以,根據(jù)能量守恒定律可得
(21)
因此,可以得到割草機(jī)準(zhǔn)備繞TA3翻滾之前割草機(jī)重心繞TA2質(zhì)心速度V3為
(22)

圖5 割草機(jī)從P6觸地發(fā)生沉陷到準(zhǔn)備繞TA3翻滾之前
2.3 割草機(jī)連續(xù)翻滾預(yù)測(cè)模型的判定
獲得割草機(jī)質(zhì)心速度V3后,根據(jù)能量守恒方程可以計(jì)算出割草機(jī)繞TA3軸轉(zhuǎn)動(dòng)到重心(CG)處在接觸點(diǎn)C3的正上方時(shí)的質(zhì)心速度VZ(見(jiàn)圖6)。根據(jù)此時(shí)的質(zhì)心速度VZ就可以判斷割草機(jī)的翻滾特性,即連續(xù)翻滾、非連續(xù)翻滾和臨界狀態(tài)。臨界狀態(tài)定義為:翻滾過(guò)程中割草機(jī)的動(dòng)能剛好可以使其重心(CG)處在接觸點(diǎn)O的正上方,此時(shí)重心(CG)的線速度VZ=0。非連續(xù)翻滾定義為:翻滾過(guò)程中割草機(jī)的動(dòng)能不足以使重心(CG)超越接觸點(diǎn)O的正上方,重心(CG)只能處在過(guò)接觸點(diǎn)O的垂線的右側(cè),割草機(jī)最終又返回到斜面上;連續(xù)翻滾定義為:翻滾過(guò)程中割草機(jī)的動(dòng)能足以使重心(CG)超越接觸點(diǎn)O的正上方,重心(CG)到達(dá)過(guò)接觸點(diǎn)O的垂線的左側(cè)(斜坡下坡的方向),此時(shí)重心(CG)的線速度VZ>0。根據(jù)上述翻滾過(guò)程的分析,建立了零轉(zhuǎn)彎半徑割草機(jī)連續(xù)翻滾預(yù)測(cè)模型,并編寫(xiě)了MatLab程序。因此,對(duì)于一定的割幅,改變ROPS的高度,就可以使得VZ=0,即勢(shì)能和所需動(dòng)能相等。對(duì)應(yīng)的ROPS高度即為割草機(jī)不發(fā)生連續(xù)翻滾時(shí)的翻滾保護(hù)裝置(ROPS)的最小高度(CRH)。
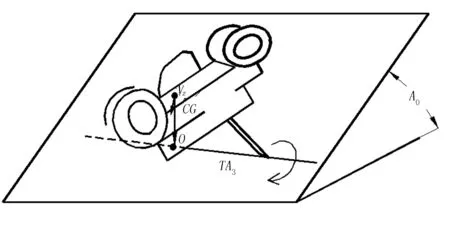
圖6 割草機(jī)繞TA3軸翻滾
2.4 編寫(xiě)MatLab程序
根據(jù)上述理論分析編寫(xiě)MatLab 程序,流程圖如圖7所示。該程序的輸入?yún)?shù)為ZTR割草機(jī)尺寸參數(shù)、質(zhì)量、質(zhì)心位置參數(shù)、轉(zhuǎn)動(dòng)慣量及摩擦因數(shù)等,程序的輸出為翻滾特性(連續(xù)翻滾、非連續(xù)翻滾和臨界狀態(tài))及CRH。
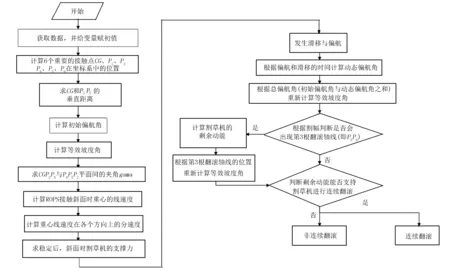
圖7 主程序流程圖
3 試驗(yàn)與討論
3.1 試驗(yàn)設(shè)備及方案
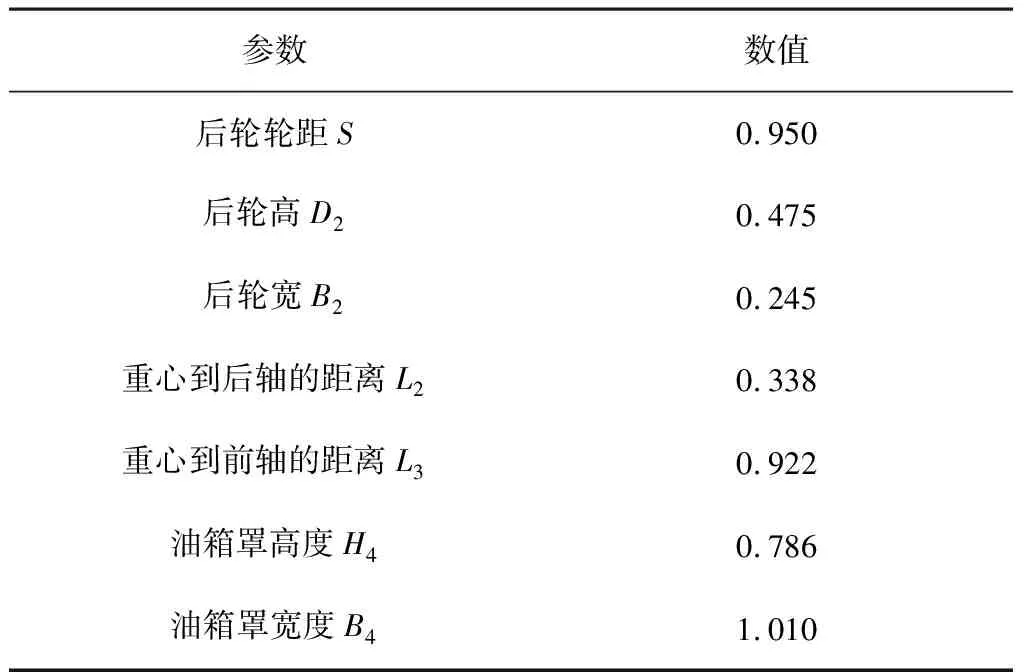
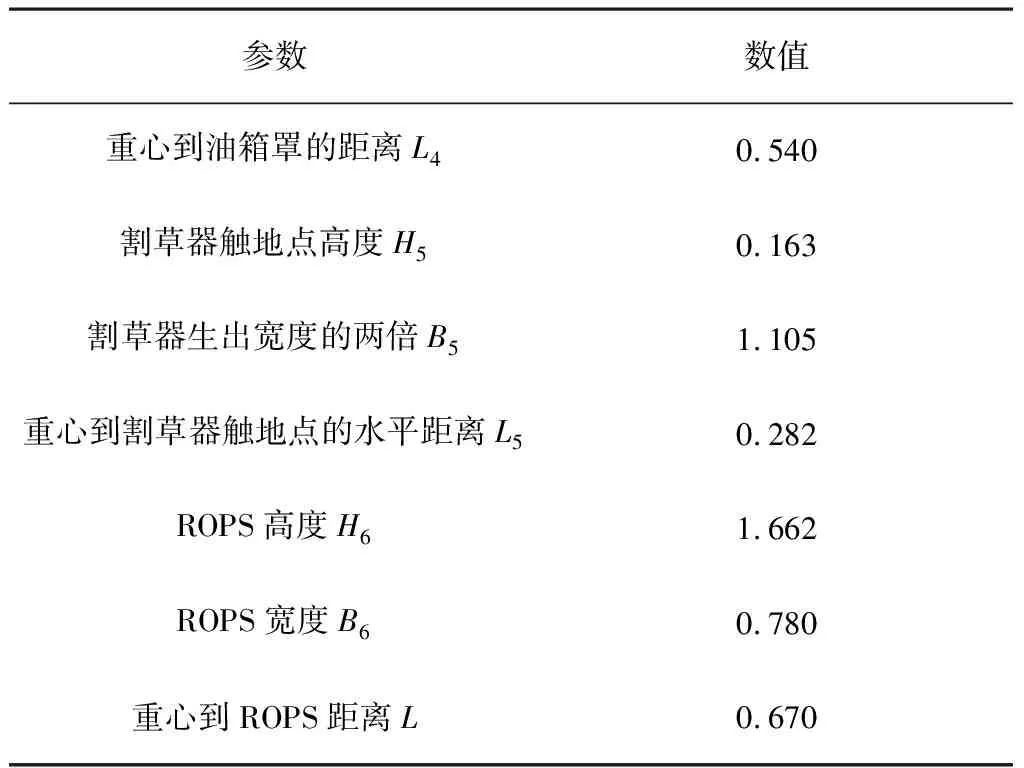
為驗(yàn)證加入動(dòng)態(tài)偏航和滑移模型的準(zhǔn)確性,以維邦WBZ12219K-S型ZTR割草機(jī)為對(duì)象,進(jìn)行了實(shí)地翻滾試驗(yàn)。割草機(jī)整機(jī)質(zhì)量(MC)為468.5kg,其他參數(shù)及各個(gè)參數(shù)所代表的意義如表1及圖8所示。

表1 維邦WBZ12219K-S的參數(shù) m
續(xù)表1
續(xù)表1
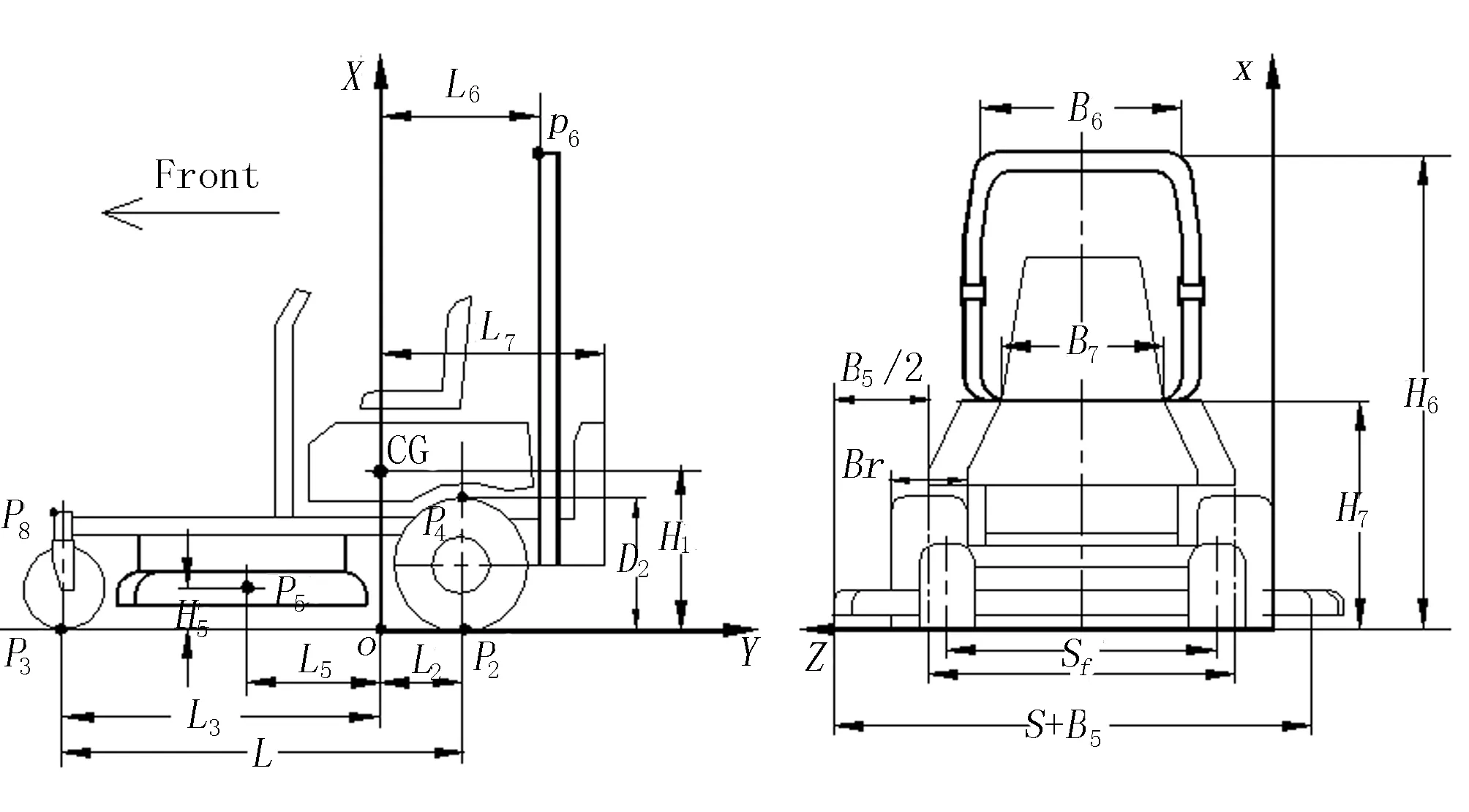
圖8 維邦WBZ12219K-S型ZTR割草機(jī)參數(shù)
表2為試驗(yàn)過(guò)程的實(shí)際參數(shù)。

表2 試驗(yàn)參數(shù)
試驗(yàn)方案如圖9~圖11所示。

圖9 裸機(jī)(ROPS 1.65m,30°)

圖10 1.2m割幅(ROPS 1.65m,20°)
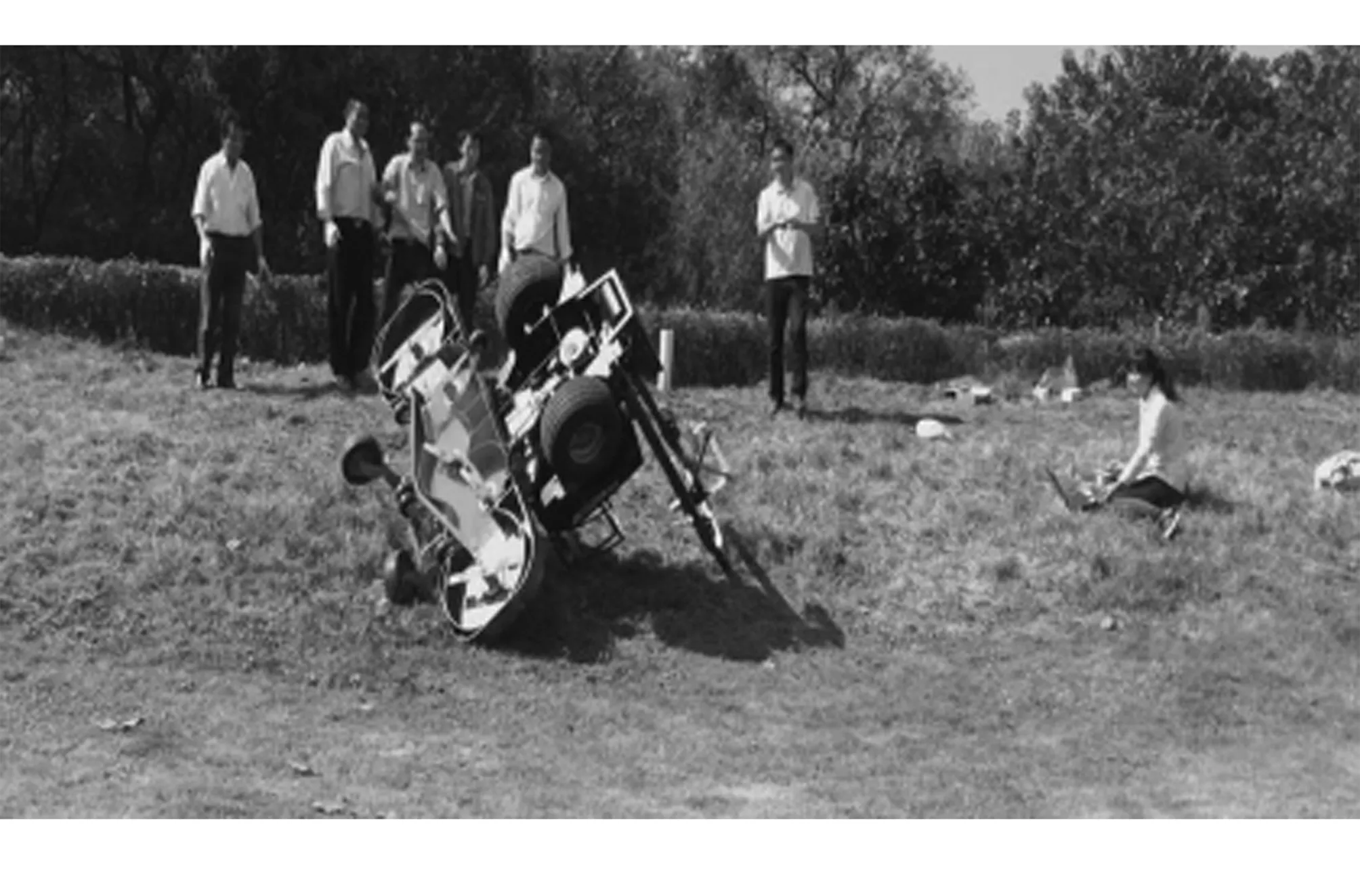
圖11 2.3m割幅(ROPS 2.036m,21.4°)
首先將割草機(jī)停在初始臺(tái)上,然后升高初始臺(tái)直至與翻滾臺(tái)齊平,最后用初始臺(tái)將割草機(jī)掀翻。分別測(cè)試裸機(jī)、割草器寬度為1.2m和1.8m的割草機(jī)翻滾特性。由于割草器寬度為2.3m的割草機(jī)外形尺寸較大,故翻滾試驗(yàn)在揚(yáng)州某高爾夫訓(xùn)練場(chǎng)進(jìn)行。
3.2 模型預(yù)測(cè)結(jié)果與試驗(yàn)結(jié)果比較
定性的研究可以從表3看出:在割草器寬度較小時(shí),試驗(yàn)及理論模型結(jié)果存在誤差;在寬度較大時(shí),試驗(yàn)及理論模型結(jié)果一致。為了定量研究理論模型預(yù)測(cè)結(jié)果與試驗(yàn)結(jié)果的誤差,引入相對(duì)誤差的概念(公式23)。計(jì)算出如下3種情況的試驗(yàn)結(jié)果與理論模型結(jié)果的相對(duì)誤差值(見(jiàn)表4和圖12)。由表4可知,最大相對(duì)誤差為17.6%。
(23)
3.3 誤差分析
相對(duì)誤差主要來(lái)自于:①實(shí)驗(yàn)平臺(tái)的不平度; ②實(shí)驗(yàn)過(guò)程中割草機(jī)上各種液體的流動(dòng)而導(dǎo)致的前后質(zhì)量分布變化;③建立模型過(guò)程中忽略的因素,如俯仰運(yùn)動(dòng)等。

表3 試驗(yàn)及理論模型結(jié)果對(duì)比

表4 試驗(yàn)及理論模型結(jié)果相對(duì)誤差值
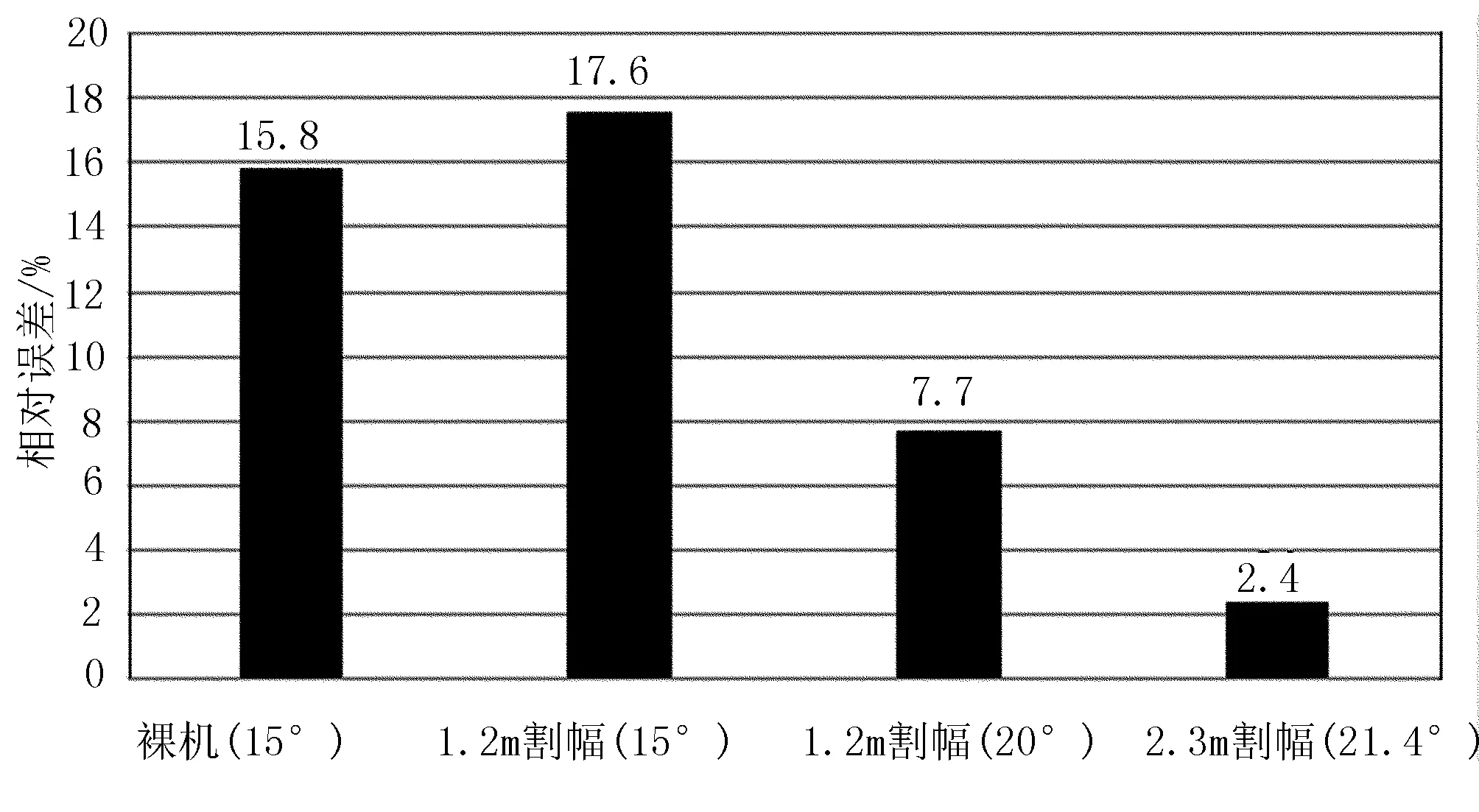
圖12 預(yù)測(cè)的CRH值與實(shí)驗(yàn)的相對(duì)誤差對(duì)比
3.4 偏航與CRH的關(guān)系討論
初始偏航和CRH的關(guān)系如圖13所示。

圖13 初始偏航與CRH的關(guān)系
從趨勢(shì)來(lái)看,初始偏航較小時(shí),CRH對(duì)初始偏航角變化表現(xiàn)的很敏感;隨著初始偏航角慢慢增大,它對(duì)CRH的影響慢慢變小并趨于平緩。圖13中存在兩個(gè)明顯的拐點(diǎn):第1個(gè)拐點(diǎn)出現(xiàn)在極限點(diǎn)3(割草器寬度增加到1.4m左右時(shí)),原本存在的翻轉(zhuǎn)軸線TA4(P6與P8的連線)將不復(fù)存在,這會(huì)使得割草機(jī)的翻滾難度突然增加;第2個(gè)拐點(diǎn)出現(xiàn)在點(diǎn)6,原因是初始偏航角增大且草地與割草器的接觸點(diǎn)不斷后移,增加了割草機(jī)翻滾中的勢(shì)能,使得翻滾變得較為容易。圖14為動(dòng)態(tài)偏航角與CRH預(yù)測(cè)值的關(guān)系。通過(guò)選取割草器寬度及改變ROPS高度直到臨界狀態(tài)發(fā)生(即CRH),此時(shí)輸出的中間變量為動(dòng)態(tài)偏航角。動(dòng)態(tài)偏航角為過(guò)程中的變量,它與斜坡摩擦因數(shù)、翻滾初始割草機(jī)的勢(shì)能及割草機(jī)在翻滾中的重力分配等有關(guān)系,故動(dòng)態(tài)偏航角與CRH呈非線性關(guān)系。
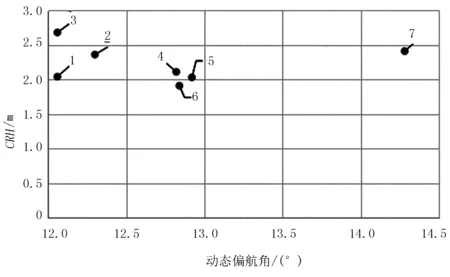
圖14 動(dòng)態(tài)偏航與CRH的關(guān)系
4 結(jié)論
本文在建立模型時(shí)加入了偏航運(yùn)動(dòng),使CRH的預(yù)測(cè)結(jié)果能更加接近真實(shí)試驗(yàn)結(jié)果。試驗(yàn)表明:在角度較大的情況下,模型能較準(zhǔn)確地預(yù)測(cè)出ZTR割草機(jī)的CRH。
試驗(yàn)中,B5及μ56是影響連續(xù)割草機(jī)翻滾特性的主要因素。因此,在滿足割草機(jī)設(shè)計(jì)標(biāo)準(zhǔn)的情況下,應(yīng)盡量增加割草機(jī)割幅,并可以通過(guò)改變割草器表面材料形狀和粗糙度來(lái)提高割草器與坡面摩擦因數(shù),以降低割草機(jī)的翻滾趨勢(shì)。
該預(yù)測(cè)模型可以幫助ZTR割草機(jī)選取合適的翻滾安全保護(hù)裝置的高度。合適的高度既可以保證操作人員的生命安全,又可以盡可能地提高割草機(jī)的通過(guò)性,從而間接地提高了割草機(jī)的工作效率。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19