基于英語語音識別的水稻收割機控制系統設計
2019-12-22 02:31:16蘇倩,杜堃
農機化研究 2019年6期
蘇 倩,杜 堃
(河北能源職業技術學院,河北 唐山 063000)
0 引言
隨著農業生產模式轉變,我國的農田逐漸向大型生產主體集中,大規模專業化生產成為現代農業的發展趨勢。在這種形勢下,以人力為主的生產方式已無法滿足生產的需求,提高農業機械化水平是必然的選擇。農業機械遠高于人工的生產效率,可以在較短時間內完成目標作業。我國農業機械的研制起步較晚,但是在近些年的普及應用非常迅速。與國外相比,我國的部分農業機械性能還需要改善,農業生產的整體機械化率有提升的空間和潛力。
水稻是亞洲國家的主要糧食作物,我國北至黑龍江、西至新疆等有灌溉條件的地區都有水稻種植。我國的水稻種植面積僅次于印度,產量居世界第一。水稻在農業中占有重要地位,其高產穩產是國家糧食安全的保障。作為最主要的糧食作物,水稻生產的機械化率相對較高,在部分稻區已經實現了全程機械化。在水稻生產環節中,收割是最后的步驟,對產量有著直接影響。水稻的收割時期較短,必須要把握最佳收割時機,才能獲得最好的效益。水稻提前收割會損失日產量,推遲收割則會增加鳥鼠蟲害、極端天氣和自然落粒造成的損失。另外,在雙季稻種植區,早稻及時收割也有利于晚稻種植的順利開展。因此,研制水稻收割機械具有重要的意義,是水稻生產機械發展的一個重點[1]。
在水稻收割機的各項性能中,行走速度對作業質量的影響最大。合適的行走速度需要綜合考慮作業效率和質量,速度太慢導致喂入量不足,作業效率相應地降低;速度太快導致喂入量過大,谷稈分離效果差,清選損失增加,還會損壞收割機的零部件[2]。為此,國內外學者開展了許多相關研究,設計出多種收割機行走速度自動控制方法,在一定程度上解決了上述問題[3-4]。另外,人們對收割機的切割部件結構進行了分析優化,并開發出新型喂入密度檢測方法,為收割機性能改進提供了依據[5-6]。
我國主要稻區的水稻收割都采用聯合收割機進行,但收割機的自動控制水平不高,限制了機械的適用性。精準農業是現代農業的發展方向,推動了農業生產的規模化和專業化,也對農業機械提出了更高要求[7]。因此,利用現代技術設計新型水稻收割機控制系統,具有重大的現實意義。
語音識別技術可以賦予機器識別和理解語音的能力,能將人類的語音信號轉變成相應的文本或命令,其應用領域包括信息處理、教育商務、電子消費和機械控制等[8]。王登峰等和涂惠燕等分別設計了以汽車和手機為平臺的語音識別系統,通過算法改進獲得了較好的識別精度[9-10]。研究人員還根據語音識別設備的特點,將其與嵌入式技術結合,在簡化硬件設備的前提下,提高了語音識別的實時性和準確性[11-13]。
在機械控制方面,趙海濱等和富鋼等將語音識別電路與電機控制電路整合在一起,分別實現了對機械手和機床的準確控制[8,11]。上述的研究表明,語音識別在農業機械控制上有廣闊的應用前景,但目前用來對水稻收割機進行控制的報導還較少。英語是世界上應用最廣泛的語言,其語法簡單、語感自然,這些特性使得英語在機械設計和控制方面具有優勢。在農業機械的控制過程中引入英語語音,既能利用國外技術改善農業機械性能,又能增加我國成熟機械對國際市場的適應能力。本文基于英語語音識別技術設計了一種水稻收割機的控制系統,對機械的行駛速度、行駛方向和割臺高度進行語音控制,并通過實例驗證系統語音識別的準確性和實時性,用以降低收割機的操作難度,提高智能化水平。
1 系統的組成和識別流程
1.1 系統組成
收割機控制系統主要由語音識別模塊和控制執行模塊組成,語音識別模塊包括麥克風,用于語音信號的實時采集, TLC1543CN型模數轉換器將語音信號轉換為可供處理的數碼信號。語音解碼芯片為Infineon公司的Unispeech 80D51專用型,集成了8B的CMU主控制器和16B的協處理器,前后端分別帶有模擬和數字通道。語音識別模塊的核心是ST公司的S3C2440型嵌入式微處理芯片作為中央處理器,集成了優化識別算法,進行語音的處理和識別,并形成控制指令。芯片內置64kB的高速存儲器和增強型I/O端口,能夠滿足語音實時識別的要求。微處理芯片上還連接顯示屏和存儲器,用于對系統運行狀態、過程參數和語音識別結果的顯示和存儲,如圖1所示。
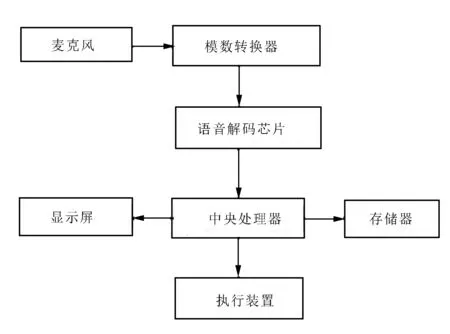
圖1 收割機控制系統的組成部分Fig.1 Components of the rice combine control system
收割機控制執行模塊接收語音識別模塊輸出的指令用于機械控制,包括行駛速度、行駛方向和割臺高度。收割機是久保田4LZ-4型半喂入履帶式聯合收割機,采用無級變速,割幅為2m,蓄電池同時為語音識別模塊提供電源。行駛速度的控制裝置為步進電機、油門和剎車,步進電機按相應的方向和幅度轉動,調節油門和剎車的位置實現對機械速度的控制。行駛方向的控制通過方向盤控制器完成,控制器與收割機的方向盤連接,由馬達驅動轉向。方向盤控制器安裝方便,對機械具有很好的適應性。割臺高度由弱電信號控制的液壓閥進行調整,能夠與S3C2440型嵌入式芯片兼容,接收其輸出的電信號。
1.2 英語語音識別流程
收割機操作人員的英語語音指令通過麥克風錄入,經過預處理去除環境中的背景噪音,然后轉換為數字信號用于提取語音特征。鑒于嵌入式芯片的性能和運算速度,在保證準確識別的前提下,本文采用精簡的特征維數減少計算量:第1識別階段為22維MFCC特征的初步識別,第2識別階段為26維MFCC特征的精確識別。首先按照訓練模板進行初步識別,得到多個候選詞條;然后輸出選項,在新的模型框架中獲得精確識別的結果。另外,可以基于隱馬爾科夫(HMM)模型,直接進行精確識別;識別得到的語義與參考模型庫做相似度比較,將相似性最高的特征矢量作為識別結果,以控制指令的形式輸出,如圖2所示。
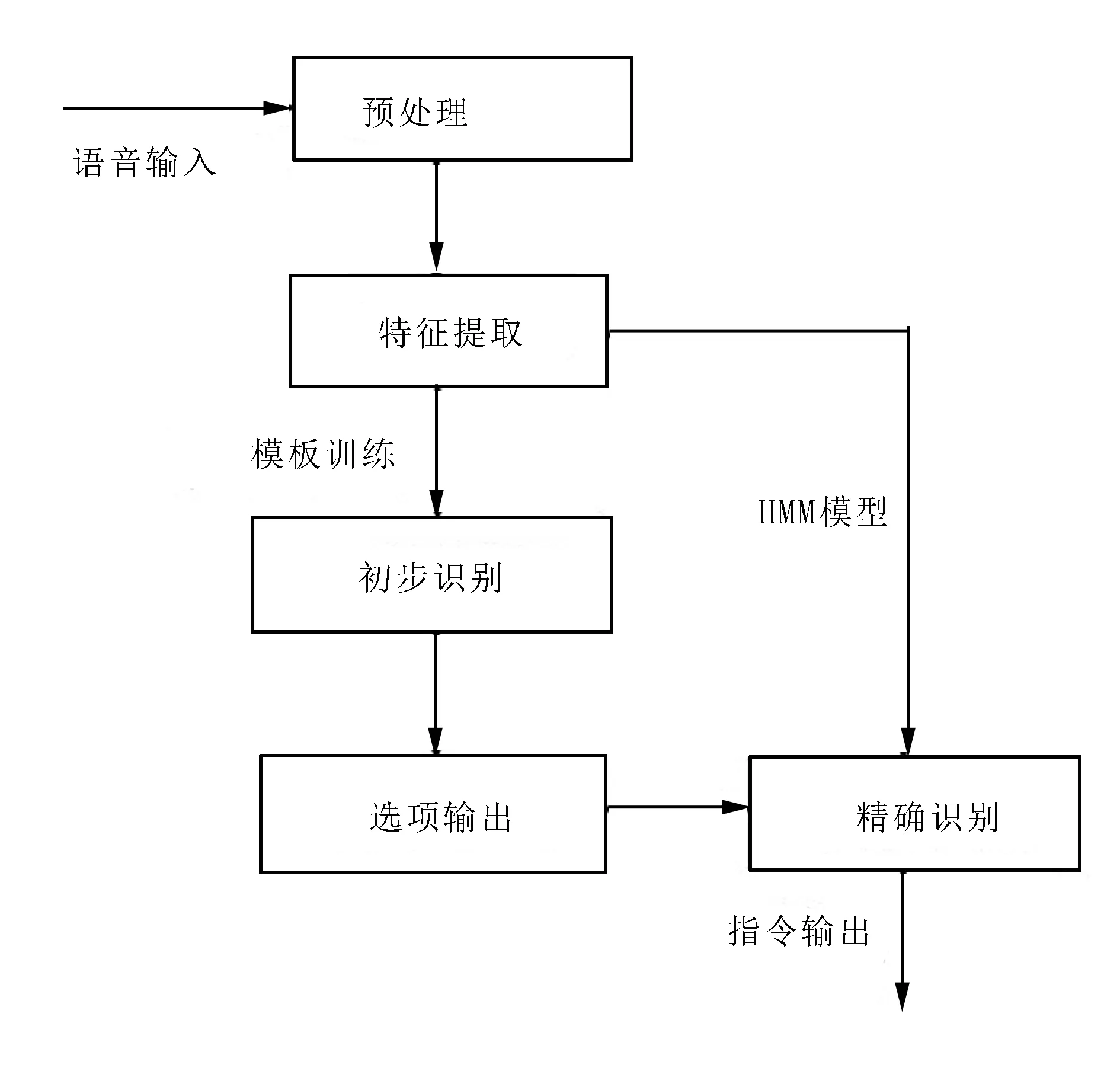
圖2 語音識別的流程Fig.2 Flow of speech recognition
2 軟件和識別算法
英語語言識別模塊中的軟件采用C語言進行代碼編程,編寫的代碼涉及語音輸入至指令輸出之間的各個環節,以及聲音檢測失敗、重新訓練、存在背景噪音和序號錯誤等突發狀況下的處理程序。C語言編程的支持軟件為微軟語音應用軟件開發工具包SASDK1.1,用于加載xml描述方法,保存輸入的音頻和序列分析結果。當出現錯誤的異常識別結果時,SASDK1.1工具包可以創建和部署糾錯應用程序,并重新調試識別程序。嵌入式芯片中帶有Sphinx語音識別引擎作為英語語音識別的基礎,為連續語音識別、大詞匯量和高識別率識別提供支持。Sphinx語音識別引擎的源代碼為開放型,方便與其它相關技術兼容和整合。
識別算法主要集中在特征提取和精確識別兩個環節。與理想環境相比,實際應用環境中的語音特征質量明顯降低,歸因于背景噪音、目標通道畸變和人為因素的影響。本文通過MFCC的一階和二階差分來消除噪音干擾,提高目標語音的可識別性。差分計算公式參考涂惠燕等(2011)的研究,采用22維的一階差分MFCC和26維的二階差分MFCC。
語音的精確識別基于HMM模型,利用馬爾科夫鏈模擬語音的特征量變化,然后通過三元函數建立馬爾科夫模型;計算得到初始狀態的矢量分布概率后進行掃描,從而產生特征狀態的序列,最后對序列進行預加重、分幀和FFT變換處理實現對語音的識別。在模板訓練過程中,標準發音的特征值利用Baum-Welch算法計算獲得,識別過程中輸入的用戶語音特征則利用Viterbi算法解碼。
3 試驗結果和分析
試驗中,系統語音采集頻率為15kHz,語音的特征提取分為有重疊的幀,每幀提取1次語音特征,幀長30ms,幀移15ms。將水稻收割機控制過程中使用的英語短語按照功能分類,組成短語的基本單詞如表1所示。
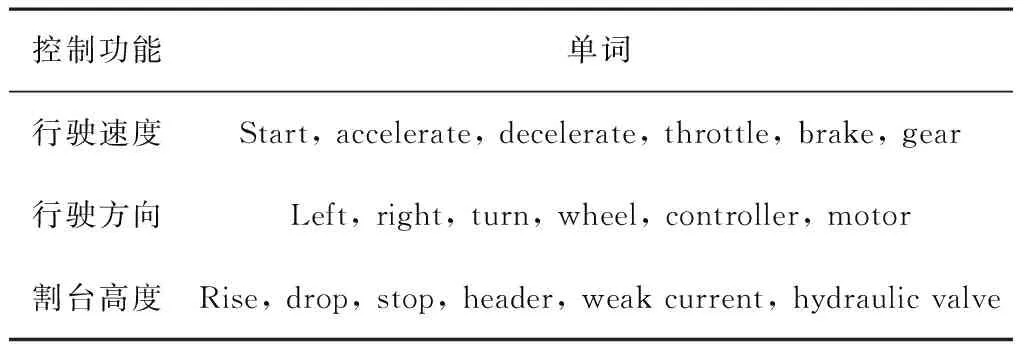
表1 不同控制功能的應用單詞Table 1 Words applied in different controlling function
針對實際應用需求,系統分別在20、40、60、80dB的4種噪音環境中進行測試。在每種噪音環境下,由建立訓練模板的收割機特定駕駛員向語音識別系統發出50條英語短語形式的指令,記錄系統準確識別的英語單詞數、短語數和識別所用的平均時間,評價系統的準確性和實時性。
系統測試的結果如表2所示。理想環境下,系統對英語單詞和短語的識別率分別達到98%和96%。隨著環境噪音的增加,識別率有所下降;在噪音最嚴重的環境下,對英語單詞和短語的識別率仍然達到91%和88%,具有較高的準確性和適應性。系統對英語指令的平均識別時間為43~47ms,沒有受到環境噪音的影響,可以滿足實時識別的要求。
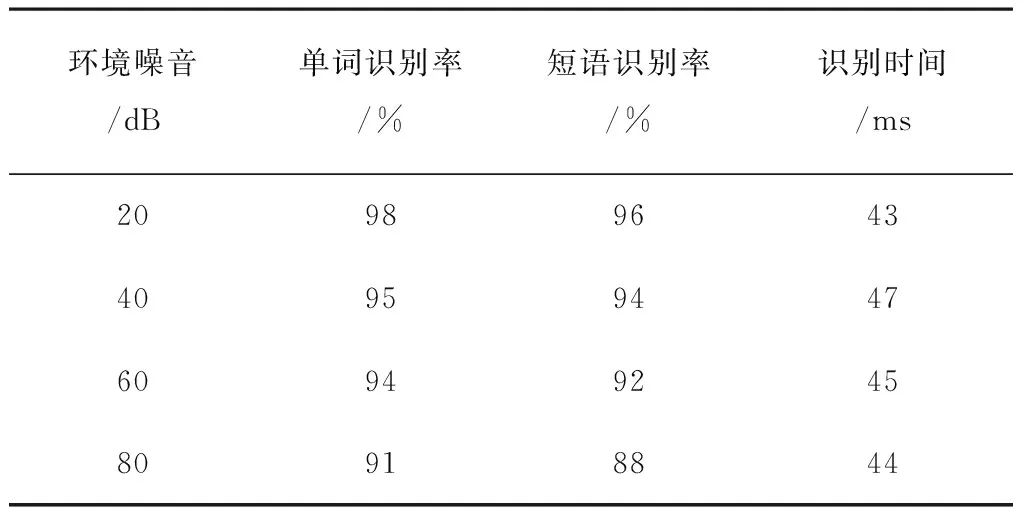
表2 語音識別系統的準確性和實時性Table 2 Accuracy and real time of speech recognition system
4 結論
基于英語語音識別技術設計了一種水稻收割機的控制系統,由語音識別模塊和控制執行模塊組成。語音識別模塊的核心是嵌入式微處理芯片,基于HMM模型算法識別英語語音,識別結果以指令的形式輸出,對收割機的行駛速度、行駛方向和割臺高度進行控制。試驗表明:系統英語語音識別具有較好的準確性和實時性,可以用來降低收割機的操作難度,提高智能化水平。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
今日農業(2021年14期)2021-10-14 08:35:40
文苑(2020年6期)2020-06-22 08:41:52
文苑(2019年22期)2019-12-07 05:29:00
新東方英語·中學版(2017年9期)2017-09-25 20:25:46
小學生導刊(低年級)(2016年2期)2016-02-24 23:02:11
小天使·五年級語數英綜合(2014年5期)2014-06-25 05:22:42
