噴桿運動與噴霧沉積分布變異系數(shù)關(guān)系試驗研究
2019-12-22 02:31:10崔龍飛薛新宇樂飛翔秦維彩周晴晴
農(nóng)機化研究 2019年6期
崔龍飛,薛新宇,樂飛翔,秦維彩,周晴晴
(農(nóng)業(yè)部南京農(nóng)業(yè)機械化研究所,南京 210014)
0 引言
噴霧機被廣泛用于作物病蟲草害的防治,可使農(nóng)作物產(chǎn)量增大[1-3]。當(dāng)噴霧機在田間作業(yè)時,噴桿水平面和豎直面內(nèi)的運動導(dǎo)致重噴或者漏噴[4]。噴霧機在起伏不平的田間行駛時,影響噴霧分布的有害運動主要包括噴桿的滾轉(zhuǎn)、橫擺和振蕩,MahalingaIyer和 Wills等最早開始了噴霧機的噴桿晃動對噴霧分布形態(tài)的影響研究[5-10]。噴桿噴霧分布仿真模型揭示:噴桿水平運動導(dǎo)致噴霧分布變異系數(shù)在20%~600%之間變化,噴桿垂向振動導(dǎo)致噴霧分布變異系數(shù)在0%~1 000%之間變化[11-14]。
許多學(xué)者開始研究使用懸架來衰減由地面?zhèn)鬟f到噴桿上的振動,有兩種懸架控制技術(shù):被動懸架和主動懸架。被動懸架主要通過使用彈簧、阻尼來保持系統(tǒng)剛度,減小振動強度[15-17],能夠較好地衰減來自路面不平整產(chǎn)生的高頻振動,主動懸架能夠使噴桿跟蹤低頻的地面起伏變化[18-19],因此許多學(xué)者開始在理論和試驗兩方面研究主動噴桿懸架系統(tǒng)[20-21]。迄今為止,雖然噴桿的不規(guī)律運動被認(rèn)為較大地限制了噴霧均勻性,但懸架的應(yīng)用仍然較少,傳統(tǒng)主動控制方法僅在噴霧機低速工作時能滿足性能要求[22]。懸架設(shè)計過程中需要考慮噴何種運動范圍內(nèi)的噴霧均勻性是滿足病蟲害防治要求的,因此開展噴桿運動對噴霧沉積分布的影響規(guī)律研究對噴桿懸架的設(shè)計具有重要的指導(dǎo)意義。
本文在噴桿末梢安裝超聲波測距傳感器和加速度傳感器,測量噴桿的運動和垂向振動加速度。在田間布置水敏紙,測量沿著噴桿方向和行駛方向的霧滴分布均勻性變異系數(shù)。通過GPS輔助慣性測量系統(tǒng)獲取噴霧機底盤的運動姿態(tài),通過對試驗數(shù)據(jù)分析,探明車體晃動、噴桿運動、噴霧分布變異系數(shù)之間的關(guān)系。
1 噴桿式噴霧機
試驗噴霧機為天鵝集團(tuán)埃森SWAN3WP-500噴桿式噴霧機,如圖1所示。噴桿臂展長9.5m,外側(cè)噴頭增加噴幅至12m;噴桿通過平行四邊形機構(gòu)與車架相連,無減振懸架,通過雙作用油缸實現(xiàn)噴桿整體離地高度在0.46~1.39m調(diào)節(jié);噴桿上等間距0.47m安裝21個陶瓷錐形噴嘴,噴桿末梢裝有側(cè)噴嘴4個,藥箱容量500L,發(fā)動力功率17.1kW,作業(yè)速度4km/h;噴桿上使用的噴嘴為ITALY MAODEN系列80°雙聯(lián)陶瓷錐形噴嘴,最大工作壓力2MPa,試驗時工作壓力2MPa,噴嘴流量0.7L/min。
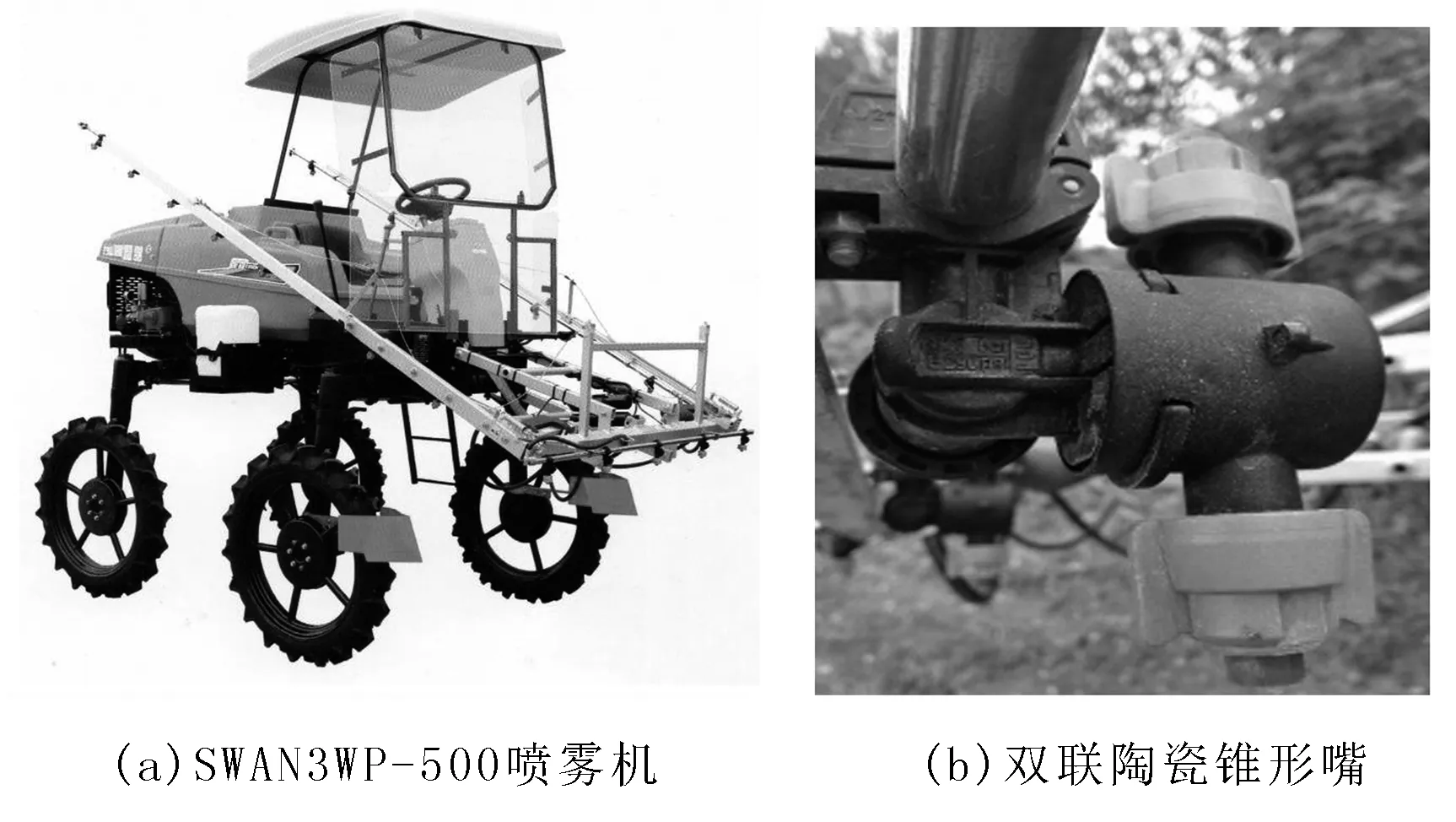
圖1 試驗噴霧機Fig.1 Test sprayer
2 材料與方法
2.1 噴桿運動測量
由于噴桿采用鋁合金材質(zhì),在田間作業(yè)過程中,地面激勵導(dǎo)致噴桿發(fā)生側(cè)傾和彈性變形等無規(guī)律運動,因此噴桿的運動使用超聲波距離傳感器及加速度傳感器共同測量。如圖2(a)所示:噴臂上加速度傳感器的安裝在噴臂中間位置,該傳感器為IEPE壓電式加速度傳感器(東華測試,型號105E,軸向靈敏度1 006mV/g,量程±5g,工作溫度 -20℃~80℃)。如圖2(b)所示:超聲波感器安裝在末梢上,超聲波距離傳感器型號為U-GAGE U45Q( Banner,美國),響應(yīng)時間可調(diào)節(jié)范圍為 40~1 280ms,供電電壓15~24V,輸出模擬電壓0~10V,量程0.25~3.0m。動態(tài)采集分析儀器型號東華測試DH5902,共8通道,每通道具有獨立的16位 A/D, 獨立的DSP,并行同步采樣;所有通道連續(xù)同步采樣,每通道10到100k(Hz)分檔切換,噴霧機行駛速度4km/h,試驗采樣頻率設(shè)置為1 000Hz。濾波的范圍根據(jù)快速傅里葉變換(FFT)和功率譜曲線的能量分布,在采用分析軟件設(shè)置帶通濾波器的頻率范圍0.1~15Hz,數(shù)據(jù)采用方式為離線采集方式。

圖2 傳感器安裝Fig.2 Installation position of sensors
使用雙GPS輔助的慣性測量系統(tǒng)SBG Ellipse-D-G4A2B1(SBG System ,法國)進(jìn)行噴霧機車身運動姿態(tài)信號采集,內(nèi)置加速度計測量范圍±8g,陀螺儀角速度測量范圍±450°/s,零偏穩(wěn)定性±0.2°/s,姿態(tài)測量誤差橫滾0.1°、俯仰0.1°、偏航角0.2°,輸出頻率設(shè)置為20Hz。慣性測量系統(tǒng)的數(shù)據(jù)通過DTK 2617C無線串口模塊發(fā)送至遠(yuǎn)程接收模塊,該數(shù)據(jù)傳輸模塊使用ZigBee協(xié)議,波特率設(shè)為115 200MBPS,可以實現(xiàn)1.5km以內(nèi)的數(shù)據(jù)無線傳輸。如圖3所示:將其為安裝于噴霧機底板上,在采集分析軟件SbgCenter 中設(shè)置噴霧機中心到測量單元的相對位置及GPS天線到測量單元的相對位置。

圖3 GPS輔助的慣性測量系統(tǒng)Fig.3 GPS assisted inertial measurement system
試驗過程中,由于試驗人員跟隨噴霧機進(jìn)行數(shù)據(jù)采樣存在人身安全問題,DH5902數(shù)據(jù)采集器與上位機通過點對點無線網(wǎng)絡(luò)通訊,SBG Ellipse-D慣性測試單元與上位機通過DTK2617C無線串口模塊通訊,將筆記本電腦連接的無線模塊設(shè)置為網(wǎng)絡(luò)主節(jié)點,與SBG Ellipse-D慣性測試單元連接的無線模塊設(shè)置為從節(jié)點,并在軟件SBG Center中實時顯示并記錄噴霧機的運動姿態(tài)等參數(shù)。
2.2 噴霧沉積量的測量
噴霧的沉積分布通過水敏紙來測量,水敏紙通過桿子和夾子布置在田間小麥的上層,進(jìn)行A、B、C這3組重復(fù)試驗。如圖4所示:每組布置7片水敏紙,水敏紙編號1~7,水敏紙1~5沿噴桿方向從左到右布置,用于測量橫向的噴霧均勻性,水敏紙4、6、7位于前進(jìn)方向,用于測量沿著行駛方向的噴霧均勻性。勻速通過試驗區(qū),每次噴霧試驗后,等水敏紙上的霧滴晾干后,用鑷子或帶防水手套收取,并做好標(biāo)記,放入自封袋,帶回實驗室進(jìn)行分析。
3 試驗與結(jié)果分析
本研究于2017年4月27日上午10點在江蘇省宿遷市泗洪縣洪澤湖農(nóng)場進(jìn)行小麥試驗,株高90~100cm。為了降低葉面積指數(shù)對霧滴覆蓋率的影響,在試驗之前,選取株高和長勢相對均勻、面積約為45m×100m的地塊作為試驗處理區(qū)。試驗用Kestrel4500便攜式氣象站(美國Nielsen-Kellerman公司)測量并記錄試驗過程中的溫度、濕度和風(fēng)速,溫度最高值為32.8℃,最低值為20.5℃,平均為27.56℃;濕度最高值為83.2%,最低值為47.6%,平均為65.2%;風(fēng)速最高值為3.2m/s,最低值為0 m/s,平均為0.77 m/s。試驗現(xiàn)場如圖5所示,經(jīng)緯度如圖6所示。

圖4 試驗區(qū)內(nèi)水敏紙的布置方案Fig.4 Layout of water sensitive papers in the test area

圖5 試驗現(xiàn)場Fig.5 Test site

圖6 噴霧機行駛軌跡Fig.6 Driving trajectory of the sprayer
田間試驗結(jié)束后,將采集霧滴分布的水敏紙帶回實驗室掃描處理,A組試驗沿噴桿方向布置的5張水敏紙沿噴霧機行駛方向布置的3張水敏紙,如圖7所示。
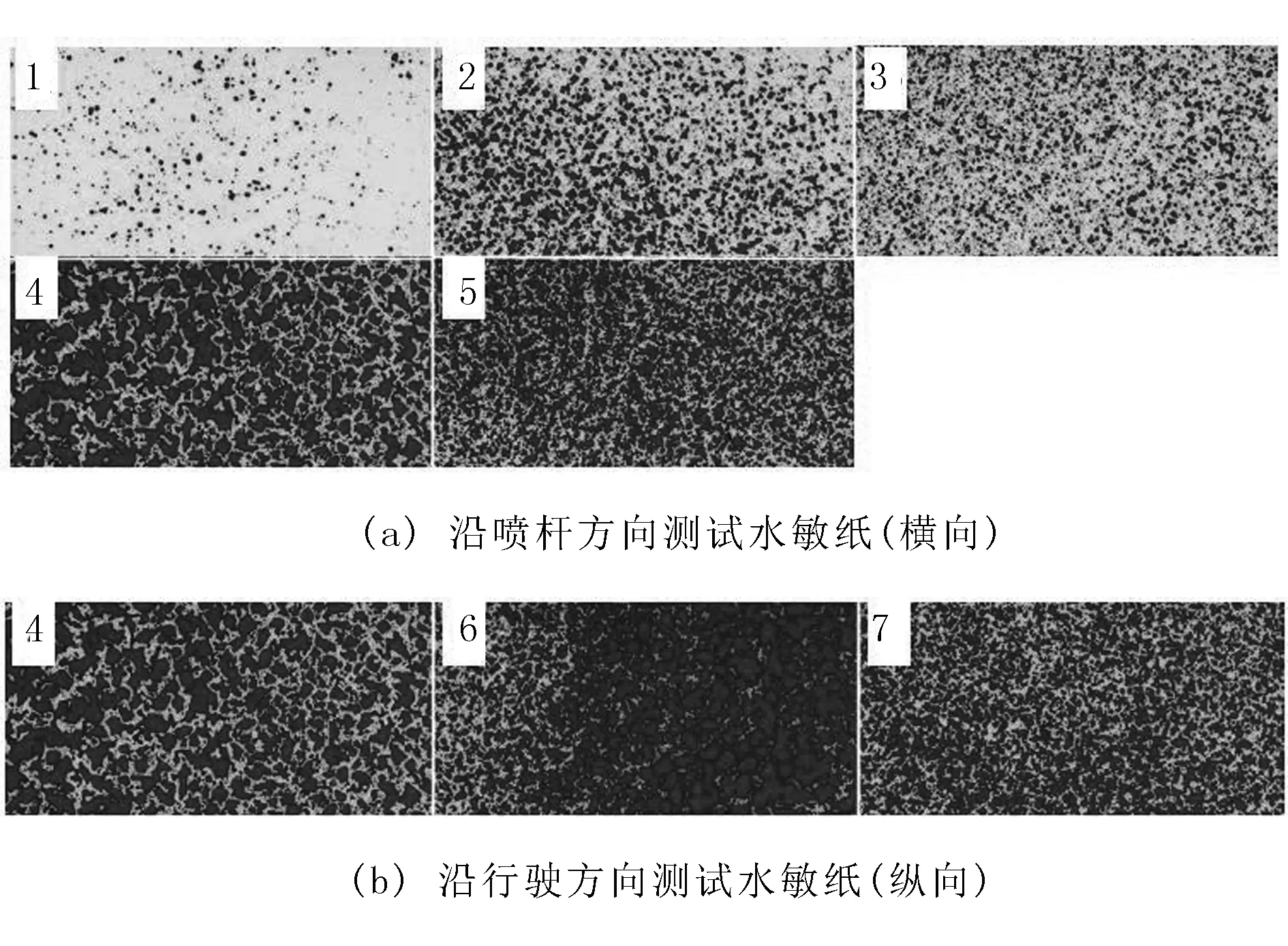
圖7 霧滴覆蓋率測試Fig.7 Test of droplets coverage
霧滴覆蓋率可以通過圖像中分析區(qū)域霧滴的像素個數(shù)的分析區(qū)域之比求得,其計算公式為
(1)
其中,M、N分別為分析區(qū)域的寬度和高度;f(i,j)為圖像分析區(qū)域中像素相對坐標(biāo)為(i,j)處的像素灰度值標(biāo)志。若像素為黑色,則f(i,j)=1;否則,f(i,j)=0。
針對A、B、C這3組試驗的水敏紙,通過圖像分析法計算霧滴覆蓋率,沿噴桿方向的霧滴分布覆蓋率及覆蓋率的變異系數(shù)如表1所示。沿噴霧機行駛方向的霧滴分布覆蓋率及覆蓋率變異系數(shù)如表2所示。從表1和表2可以看出:沿噴桿方向的霧滴覆蓋率變異系數(shù)大于行駛方向的霧滴覆蓋率變異系數(shù)。這說明,噴桿傾斜導(dǎo)致的噴嘴距離作物高度變化,對噴霧均勻性的影響更大。

表1 沿噴桿方向的霧滴覆蓋率及變異系數(shù)Table 1 Droplet coverage and coefficient of variation along the direction of the boom

表2 沿噴霧機行駛方向的霧滴覆蓋率及變異系數(shù)Table 2 Droplet coverage and coefficient of variation along the driving direction of the sprayer
試驗過程中,慣性測量系統(tǒng)Ellipse-D測得噴霧機前進(jìn)方向的前進(jìn)方向加速度均方根值1.002m/s2,最大值為3.25m/s2,如圖8(a)所示;垂直方向加速度均方根值2.36m/s2,最大值為11.29m/s2,如圖8(b)所示。垂向振動導(dǎo)致噴桿發(fā)生垂直面內(nèi)的往復(fù)震蕩,影響的是沿噴桿方向的噴霧分布變異系數(shù);前進(jìn)方向的速度變化導(dǎo)致噴桿水平面內(nèi)的往復(fù)震蕩,影響的是噴霧機前進(jìn)方向的噴霧分布變異系數(shù)。由加速度曲線可以看出:噴霧機垂向振動加速度比前進(jìn)方向的加速度大,導(dǎo)致噴桿垂直面內(nèi)的振動較大,是沿噴桿方向的霧滴覆蓋率變異系數(shù)較大的原因之一。

圖8 底盤振動加速度Fig.8 Vibration acceleration of chassis
噴霧機沿著前進(jìn)方向的滾轉(zhuǎn)角變化曲線如圖9所示。其中,滾轉(zhuǎn)角均方根1.146°,加速度最大絕對值4.51°。由于噴桿與車架之間采用的剛性連接,車體的滾轉(zhuǎn)運動直接傳遞到噴桿上,且地勢不是絕對水平,測得的車體側(cè)傾角存在趨勢項。圖10為左右噴臂的振動加速度曲線,其左側(cè)噴臂振動加速度均方根3.586m/s2,右側(cè)噴臂振動加速度均方根2.89m/s2。

圖9 底盤滾轉(zhuǎn)角時間歷程曲線
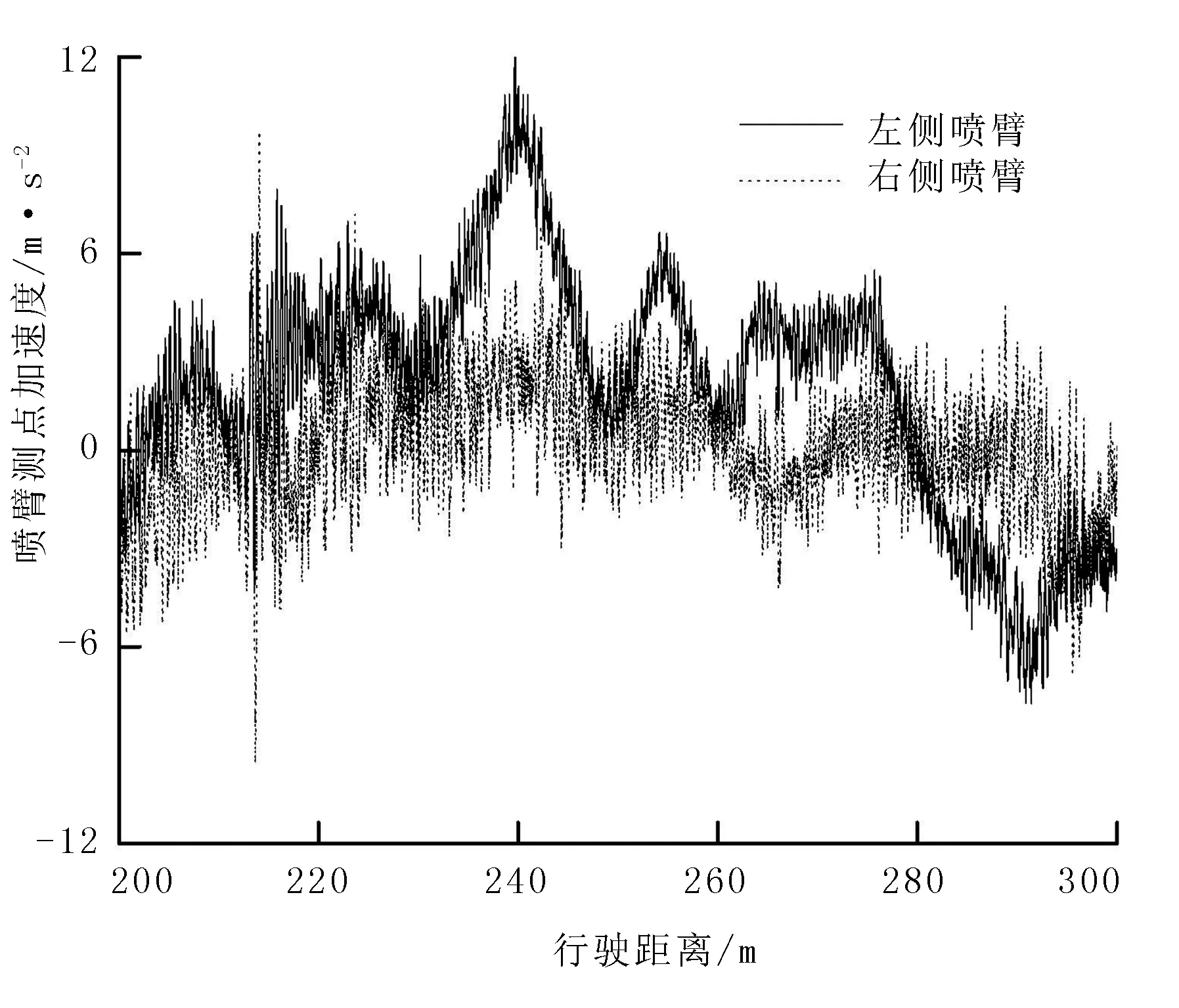
圖10 噴臂測點垂向振動加速度Fig.10 Vertical vibration acceleration of the measuring point of the boom arm
測試系統(tǒng)得到的噴桿末梢距離作物高度數(shù)據(jù)經(jīng)過低通濾波和平滑處理,如圖11所示。噴桿兩側(cè)高度差最大值為421.713 0mm,A、B、C這3組水敏紙布置在220m、240m、260m位置附近。由圖11可以看出:220m位置處噴桿高度差374mm,對應(yīng)的橫向噴霧分布變異系數(shù)為80.38%;240m位置處噴桿高度差118mm,對應(yīng)的橫向噴霧分布變異系數(shù)為65.48%。由此可知:噴桿傾斜導(dǎo)致的噴嘴高度不一,對噴霧分布影響較大,噴臂兩側(cè)高度差越大,霧滴分布的變異系數(shù)越大。

圖11 噴桿末梢距離作物高度變化曲線Fig.11 The height of the end of the boom from the crop
4 結(jié)論
噴霧機在起伏不平的田間行駛時,地面起伏會導(dǎo)致噴桿的發(fā)生不規(guī)律運動,通過在噴桿末梢安裝超聲波測距傳感器和加速度傳感器,測量噴桿的滾轉(zhuǎn)運動及垂向振動加速度。同時,在田間布置水敏紙,測量沿著噴桿方向和行駛方向的霧滴分布均勻性變異系數(shù)。使用雙GPS輔助的慣性測量系統(tǒng)獲取噴霧機底盤的運動姿態(tài)和運動軌跡,將測得的噴桿運動與水敏紙測得的沉積分布量對應(yīng)起來,通過試驗數(shù)據(jù)可知:噴霧機垂向振動加速度比前進(jìn)方向的加速度大,噴桿垂直面內(nèi)的振動較大,是沿噴桿方向的霧滴覆蓋率變異系數(shù)較大的原因之一。進(jìn)一步分析可知:A組噴霧覆蓋率均勻性采樣位置處噴桿高度差較大,對應(yīng)的橫向噴霧分布變異系數(shù)為80.38%;B組位置處噴桿高度差較小,對應(yīng)的橫向噴霧分布變異系數(shù)為65.48%;噴臂兩側(cè)高度差越大,霧滴分布的變異系數(shù)越大。噴桿方向的霧滴覆蓋率變異系數(shù)大于行駛方向的霧滴覆蓋率變異系數(shù),說明噴桿傾斜導(dǎo)致的噴嘴距離作物高度變化,對噴霧均勻性的影響更大。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
