地空兩用農業信息采集機器人行走機構仿真
2019-12-22 02:31:00李超藝劉九慶宋嘉洛吳海超
農機化研究 2019年6期
王 偉,李超藝,劉九慶,宋嘉洛,吳海超
(東北林業大學 機電工程學院,哈爾濱 150040)
0 引言
地空兩用農業信息采集機器人作為一種新型農業信息采集裝備,同時具備飛行、行走兩種運動方式。行走機構作為整個機器人硬件結構的基礎,既要實現機器人的行走功能,又要對飛行機構起到支撐定位的作用進而保證機器人在地形較為復雜的農田中起飛、降落的平穩。行走機構性能的優劣直接影響了機器人采集信息的能力。機器人行走的穩定性和環境適應性是考察其行走性能的重要指標。
目前,針對行走性能的分析問題,主要借助于計算機仿真分析技術。西北農林科技大學的薛雪利用有限元分析的原理建立了輪胎與土壤接觸的三維有限元模型,對輪胎變形量和土壤下陷量進行了研究,為車輛性能改進提供了可靠依據[1]。西北農林科技大學的倫佳琪利用輪胎-土壤的有限元模型,對不同工況下二者接觸區域的變化進行了研究,得到了胎壓與載荷的關系[2]。南昌大學的黃杰文利用柔性多體動力學仿真原理對雙橫臂懸架仿真模型進行了分析,驗證了仿真模型的動特性與樣車懸架動特性的一致性[3]。廣東工業大學的王行利用機械系統動力學仿真技術對方程式賽車的輪胎定位參數進行了研究,使前懸架的運動特性得到有效的提升[4]。
地空兩用農業信息采集機器人的工作環境是在地形較為復雜的農田中,因此在行走時極易受到溝壑引起的沖擊載荷。沖擊載荷會引起懸架結構的變形,輪胎定位參數也隨之變化,從而影響到機器人在農田中行走的穩定性。機器人具備行走和飛行兩種運動方式,同時還要搭載信息采集系統,因此機器人本體質量比較大。又由于農田土壤土質較為松軟,輪胎極易陷入土壤中,進而使機器人的環境適應性降低。針對以上兩個對機器人行走性能產生負面影響的因素,建立了輪胎-土壤力學模型及機器人前懸架動力學仿真分析模型,并分別進行了有限元仿真分析和動力學仿真分析。
1 機器人整體結構
地空兩用農業信息采集機器人主要包括行走機構、飛行機構、計算機控制系統及信息采集系統4個部分,如圖1所示。
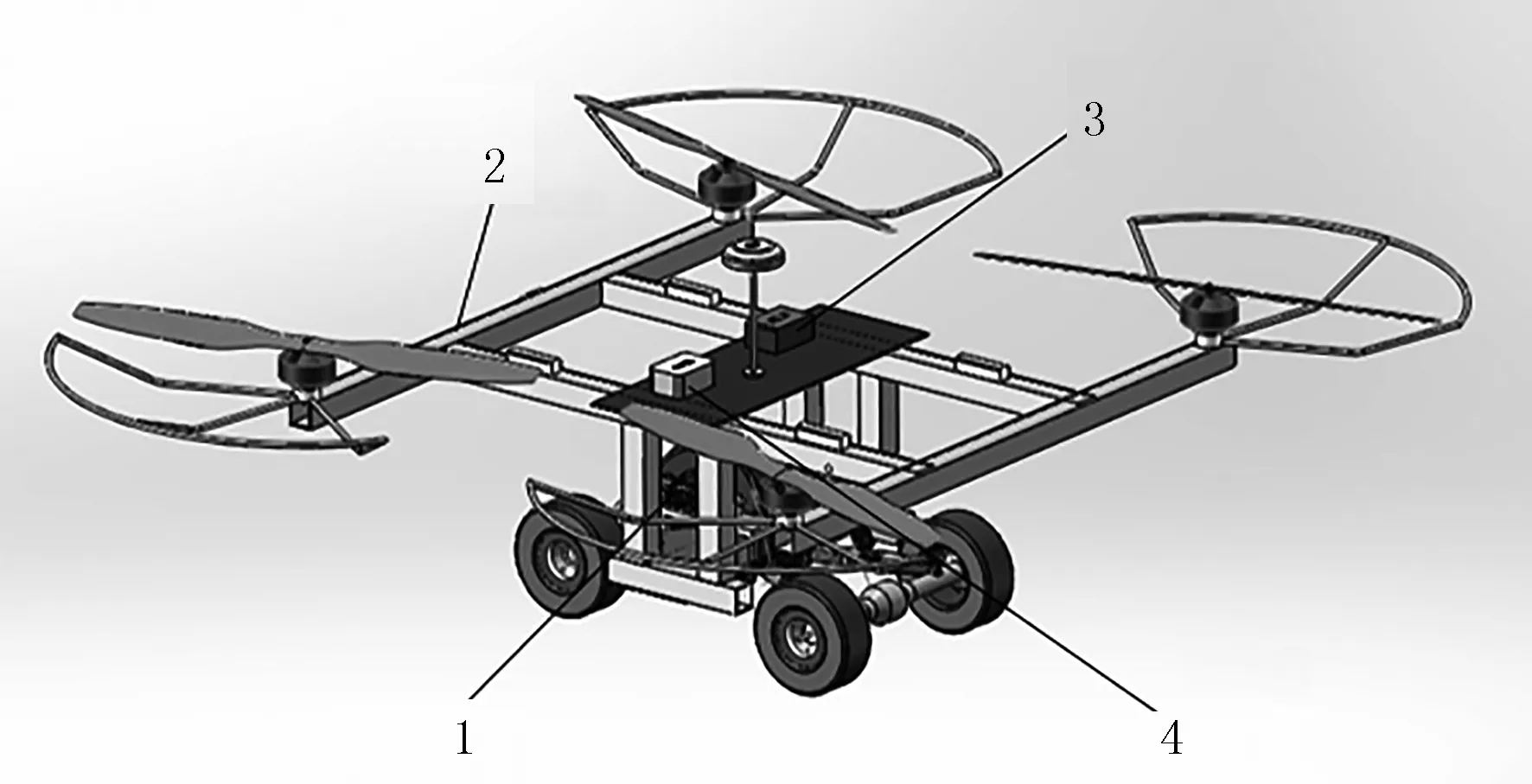
1.行走機構 2.飛行機構 3.計算機控制系統 4.信息采集系統
其各部分功能如表1所示。
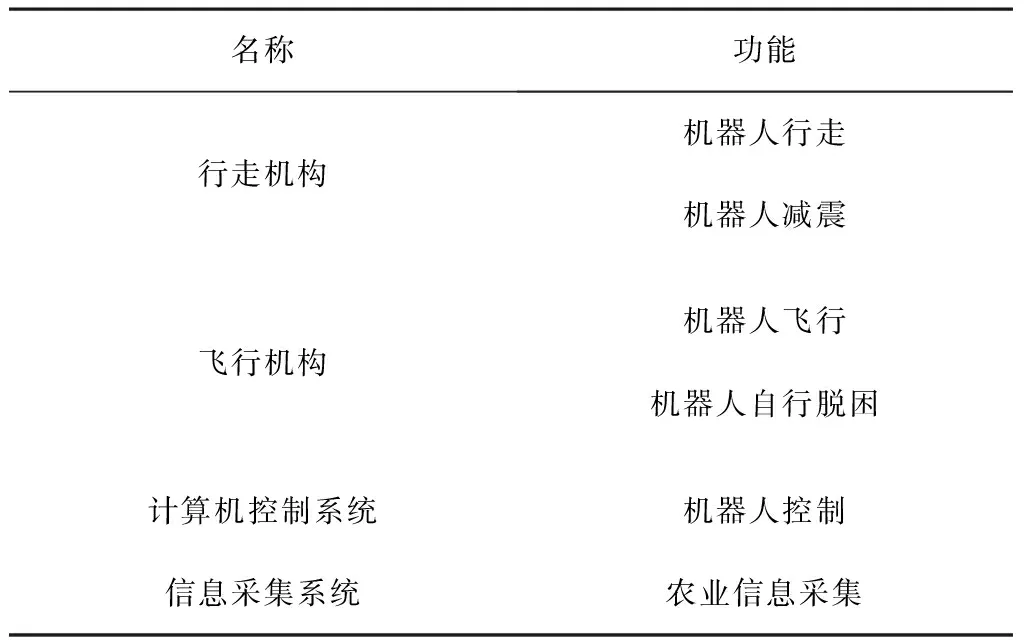
表1 機器人各部分功能Table 1 Function of each part of robot
2 輪胎-土壤相互作用有限元仿真分析
2.1 輪胎-土壤力學模型建立及參數確定
輪胎-土壤模型如圖2所示,具體尺寸參數如表2所示。
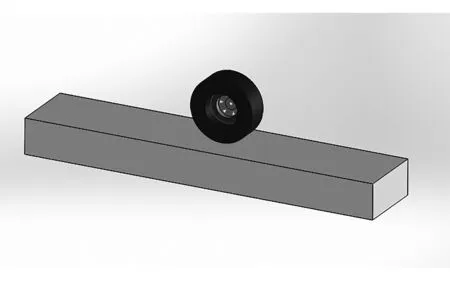
圖2 輪胎-土壤模型Fig.2 Tire-soil model
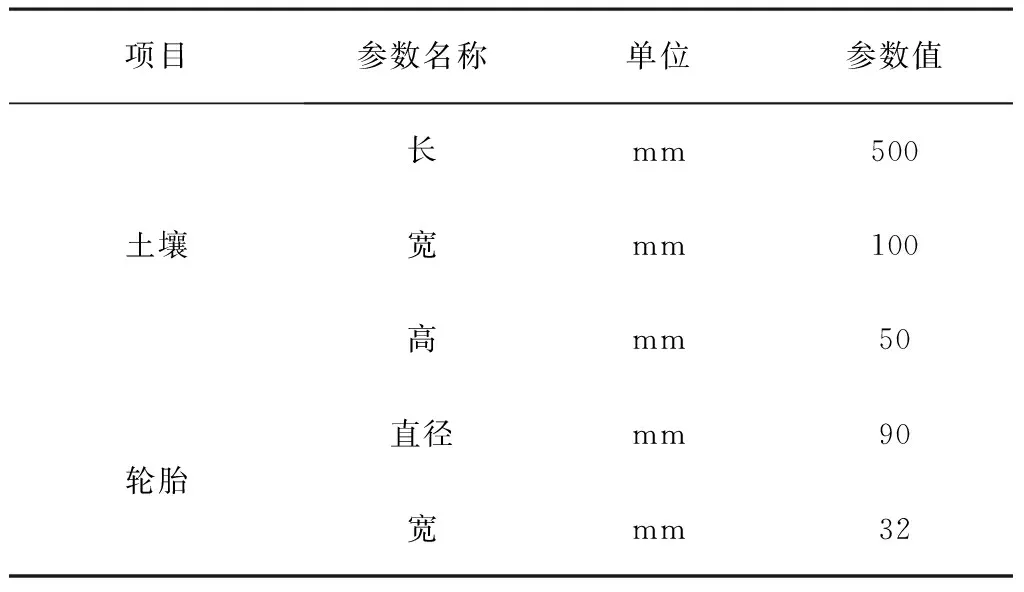
表2 輪胎-土壤模型相關參數Table 2 Tire-soil model parameters
2.2 輪胎-土壤相互作用有限元分析
打開SolidWorks/Simulation插件,建立新算例。添加約束時,在土壤模型底面和輪胎模型輪轂處添加固定鉸鏈約束。采用實體網格劃分,為了使仿真分析精度提高,選擇高品質網格。由于輪胎與土壤接觸部位容易產生較大應力設置較大密度網格,其余部分設置較小密度網格,這樣不但可以提高仿真分析精度,而且可以控制計算規模,減少仿真分析時間。網格后的輪胎-土壤模型如圖3所示。
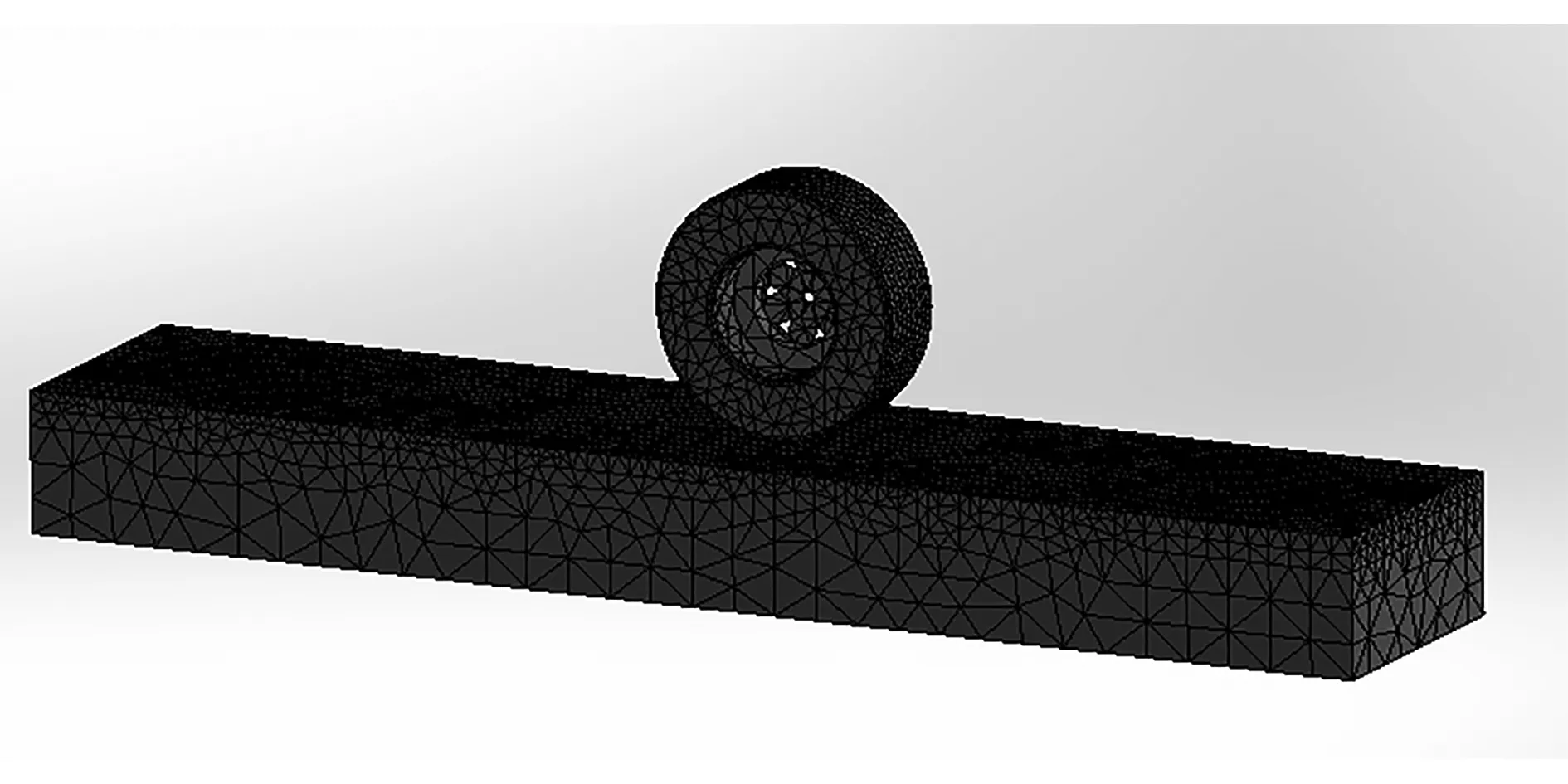
圖3 輪胎-土壤有限元網格模型Fig.3 Tire-soil finite element mesh model
機器人在農田中工作時,如果機器人輪胎對土壤的載荷超過土壤的屈服強度,易使輪胎陷入土壤中無法進行正常工作,因此選擇土壤的屈服強度10MPa作為有限元分析邊界條件。
2.2.1 靜止時輪胎-土壤相互作用有限元分析
靜止狀態下,由于機器人本體質量,輪胎向土壤施加的壓力載荷分布如圖4所示。

圖4 靜止時輪胎-土壤載荷分布Fig.4 Tire-soil load distribution at rest
機器人同時具備飛行、行走兩種運動方式,本體質量較大,因此靜止狀態下輪胎向土壤施加的壓力確定為40N。利用Simulation插件對模型進行有限元分析,其應力分布、位移分布情況如圖5、圖6 所示。
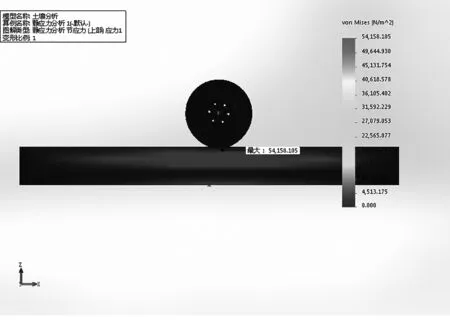
圖5 靜止時輪胎-土壤應力分布Fig.5 Tire-soil stress distribution at rest
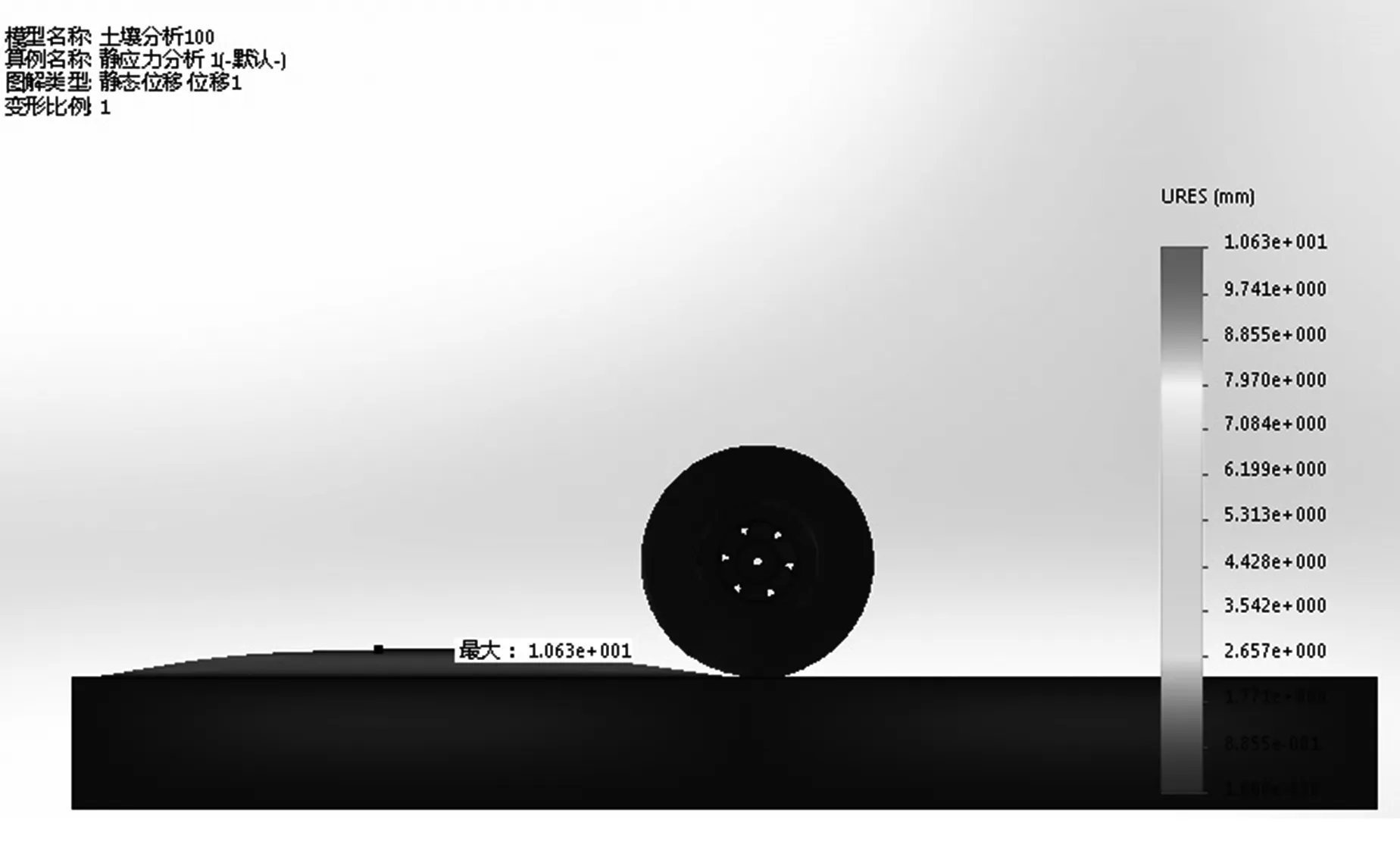
圖6 靜止時輪胎-土壤位移分布Fig.6 Tire-soil displacement distribution at rest
由圖5可以看出:應力的主要分布區域為輪胎與土壤接觸的區域,最大的應力為0.054MPa。由圖6可以看出:輪胎位移和土壤位移都集中在兩者接觸的區域,并隨著離接觸區的距離增大逐漸減小,最大位移為5.12mm。
2.2.2 行進過程中輪胎-土壤相互作用有限元分析
行進瞬時狀態下,由輸出軸給輪胎的轉矩、輪胎向土壤施加載荷分布如圖7所示。

圖7 行進中輪胎-土壤載荷分布Fig.7 Tire-soil load distribution during walking
機器人在農田中行走時需要克服較大的地面阻力,因此輪胎向土壤施加的轉矩確定為25N/m。利用Simulation插件對模型進行有限元分析,其應力分布、位移分布情況如圖8、圖9所示。
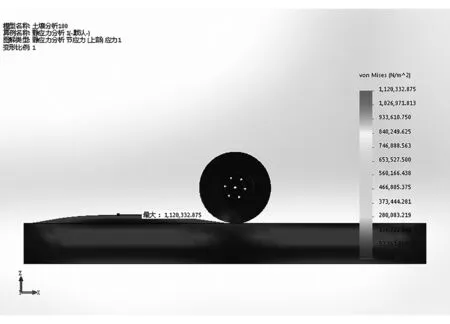
圖8 行走時輪胎-土壤應力分布Fig.8 Tire-soil stress distribution during walking

圖9 行走時輪胎-土壤位移分布Fig.9 Tire-soil displacement distribution during walking
由圖8、圖9中可以看出:輪胎前進方向一側土壤應力較大,最大的應力為1.12MPa;輪胎前進方向一側土壤位移較大,最大位移為10.63mm。
2.3 有限元仿真結果分析
通過以上有限元仿真分析,可以得到不同載荷下輪胎-土壤相互作用的應力、位移值,結果如表3所示。

表3 靜力學仿真結果數據Table 3 Static simulation result data
通過比較機器人靜止、行進時的應力值及位移值,可以看出:當重力為40N、扭矩為25N/m時,土壤應力值最大為1.12MPa,小于土壤的屈服強度10MPa。因此,輪胎不會陷入土壤中,使機器人具有較高的環境適應性。
3 前懸架動力學仿真分析
3.1 懸架結構仿真分析模型建立
機器人地面行走機構懸架采用雙橫臂獨立式懸架,其空間拓撲結構如圖10所示。

1.機架 2.懸架上橫臂 3.懸架下橫臂 4.內轉向節 5.外轉向節 6.橫拉桿 7.拉臂
該結構由7個構件組成,包括機架、懸架上橫臂、懸架下橫臂、內轉向節、外轉向節、橫拉桿及拉臂。
基于柔性多體動力學分析原理,建立了機器人地面行走機構懸架動力學仿真模型,如圖11所示。

圖 11 懸架仿真分析模型Fig.11 Suspension simulation analysis model
創建模型時,假設所有模型都是剛體,各部件之間的摩擦力忽略不計,輪胎簡化為剛性體。由于懸架結構左右對稱于機器人的縱向平面,因此創建1/2的模型來進行分析。此模型共包括7個活動構件、4個旋轉副、4個球副、1個移動副、1個點-面接觸副。7個活動構件分別為上橫臂、下橫臂、內轉向節、外轉向節、拉臂、橫拉桿及測試平臺。懸架約束位置如表4所示。

表4 懸架約束位置Table 4 Suspension constraint position
3.2 懸架結構的運動學仿真分析
為了模擬輪胎遇到障礙物或農田溝壑引起的沖擊載荷,給試驗臺施加一個正弦運動激勵,激勵方程為F=30×sin(360°×time)。由于懸架結構左右對稱,只顯示了右側懸架的各參數。
輪胎外傾角是指輪胎旋轉平面與縱向垂直平面形成的一個夾角,主要作用是使輪胎磨損均勻及減小滾動阻力;但過大的外傾角,會使輪胎產生偏磨損。輪胎外傾角的變化曲線如圖12所示。一般要求輪胎上下跳動時,外傾角變化在2°以內。由表2可以看出:輪胎外傾角變化范圍為0°~1.86°,變化量為1.86°,在允許范圍內,有效地減小了輪胎的滾動阻力,并使其磨損均勻。

圖12 外傾角變化曲線Fig.12 Camber change curve
主銷后傾角是指在縱向垂直平面內,主銷軸線與垂線之間的夾角,主要作用是形成回正力矩及抑制點頭;但也不宜過大,否則會造成轉向困難。主銷后傾角的變化曲線如圖13所示。一般要求輪胎上下跳動時,主銷后傾角變化在2°~3°以內。由表2可以看出:主銷后傾角的變化范圍為2.86°~2.88°,變化量為0.02°,在允許范圍內,既形成了回正力矩,又起到了抑制點頭的作用。

圖13 主銷后傾角變化曲線Fig.13 Kingpin caster angle change curve
主銷內傾角是指在橫向垂直平面內主銷軸線與垂線之間的夾角,主要作用是使車輪自動回正,保持行駛的直線穩定性,以免發生跑偏。主銷內傾角的變化曲線如圖14所示。一般要求輪胎上下跳動時主銷內傾角變化在3° 以內較為合理。由表2可以看出:主銷內傾角的變化范圍為8.53°~10.8°,變化量為2.27°,在允許范圍內,使輪胎能夠自動回正,保持直線行駛的穩定性。
輪胎跳動時,左右輪距必然發生變化,由于輪胎的橫向滑移,導致輪胎磨損,降低了輪胎的使用壽命。輪距的變化曲線如圖15所示。一般要求輪胎上下跳動時,輪距變化在10mm 以內較為合理。由表2可以看出:輪距的變化范圍為0~9.4mm,變化量為9.4mm,在允許范圍內,有效降低了輪胎磨損,提高了輪胎的使用壽命。

圖14 主銷內傾角變化曲線Fig.14 Kingpin inclination angle change curve

圖15 輪胎接地點側向滑移曲線Fig.15 Lateral slip curve of the tire ground point
3.3 懸架運動學仿真結果分析
通過以上運動學仿真分析,可以得到輪胎在受到沖擊載荷時,輪胎定位參數的變化值,仿真結果如表5所示。

表5 動力學仿真結果數據Table 5 Dynamic simulation result data
由表5可以看出:輪胎上下跳動時,各參數變化范圍均在合理范圍內,保證了機器人行走時的穩定性。
4 樣機行走試驗
為了保證行走機構搭載飛行機構和各種傳感器后,依然可以具備良好的行走性能和跨越溝壑的能力,進行了智能溫室田間行走能力測試。結果表明:負載后的行走機構依然具有良好的行走性能,可以滿足整機實現田間行走的所有功能要求。試驗結果如表6所示。

表6 行走試驗數據Table 6 Walking Test Data
5 結論
1)通過對輪胎-土壤的相互作用力學模型進行有限元仿真分析可以看出:無論機器人處于靜止狀態,還是行走狀態,其輪胎都不會陷入土壤中。
2)對機器人行走機構前懸架模型進行動力學仿真分析可以看出:在機器人受到不平路面引起的沖擊載荷時,采用雙橫臂獨立式懸架結構可以減小機器人行走機構的輪胎定位參數的變化,從而提高了機器人在農田中行走的穩定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
