十二表冗余捷聯慣導系統數據融合技術研究
2019-12-11 03:48:18郭建剛王躍鵬
導航定位與授時 2019年6期
郭建剛,王躍鵬,鄭 偉
(1.國防科技大學空天科學學院,長沙 410073;2.北京航天時代激光導航技術有限責任公司,北京 100094 )
0 引言
基于激光陀螺的激光捷聯慣性導航系統作為控制系統的主要設備之一,已成為航天運載火箭、航天飛機、飛船、星際探測、太空站等系統的核心制導控制設備,并廣泛應用。其主要工作原理是利用激光陀螺儀及石英加速度計作為慣性敏感部件,實時測量載體姿態和速度等信息,為控制系統導航解算提供依據。相較于平臺式慣導系統,捷聯式慣導系統具有結構簡單、工作壽命長、力學環境適應性強、可靠性高等特點,同時由于其自主性、連續性、隱蔽性等優點,慣性導航系統在組合導航系統中常作為基礎參考系統,其可靠性至關重要[1]。
隨著現代航空航天技術和需求的進一步發展,對導航系統的可靠性的要求也越來越高。提高導航系統可靠性的系統設計手段主要有多表冗余和多機備份兩種方式,其中多表冗余設計以其更低的硬件成本和更高的理論可靠度成為目前國內外研究和應用的主流。例如應用于波音777飛機的容錯大氣數據參考系統(Fault-Tolerant Air Data Inertial Reference System,FT/ADIRS)和德爾塔系列火箭的冗余激光捷聯慣性導航系統(Redun-dant Inertial Flight Control Assembly,RIFCA)[2],均采用了十二表(6只激光陀螺、6只加速度計)冗余設計,理論可靠度與四套常規系統相當。在多表冗余慣導系統工作的過程中實時進行系統的故障診斷與隔離,主要方法有廣義似然檢驗(Generalized Likelihood Test,GLT)[3-4]、最優奇偶性測試(Opti-mal Parity Test,OPT)[5-6]、多奇偶向量法[7]以及雙故障隔離法[8]等,之后利用剩余正常儀表完成導航解算。
多表冗余慣導系統數據融合技術是利用冗余儀表數據提高系統導航精度的有效手段。飛行器控制系統完成導航解算需要慣導系統輸出的三軸姿態和速度信息,常規三正交慣導系統通過3只陀螺和3只加速度計的輸出可直接解算得到上述信息。采用多表冗余設計的慣導系統,由于冗余儀表輸出的測量數據存在冗余,彼此不獨立,因此可以通過多傳感器數據融合技術,利用最優估計算法得到三軸姿態和速度信息的最優估計值,從而盡可能地消除測量數據中的隨機誤差,充分利用所有測量數據,提高導航精度。
本文針對采用正十二面體構型方案的十二表冗余激光捷聯慣性導航系統(以下簡稱十二表系統),通過仿真計算和實物樣機試驗測試對系統的數據融合算法進行了研究。
1 正十二面體儀表冗余構型和樣機簡介
十二表冗余慣導采用6只激光陀螺和6只石英加速度計的冗余配置,在儀表精度一定的情況下,該儀表構型方案直接影響系統的導航精度和故障診斷與隔離的能力。正十二面體儀表冗余構型是激光慣導采用12只慣性儀表配置時的最優儀表構型方案,能夠使系統導航性能最優,同時故障檢測能力也顯著優于其他幾種構型方式[9]。
1.1 正十二面體儀表構型簡介
常規慣導系統只需配置6只儀表,包括3只陀螺和3只加速度計,以完成對載體的角運動和線運動共6自由度運動信息的測量,儀表采用正交配置,且各儀表敏感軸與慣導測量坐標系各坐標軸重合,如圖1所示。其中O-X1Y1Z1為箭體坐標系,其中OX1為縱軸,OY1為法向軸,OZ1為橫向軸;O-XsYsZs為激光慣導測量坐標系,與箭體坐標系重合;Gx、Gy、Gz和Ax、Ay、Az分別為3個激光陀螺和3個加速度計,安裝方向與OXs、OYs、OZs軸方向一致。
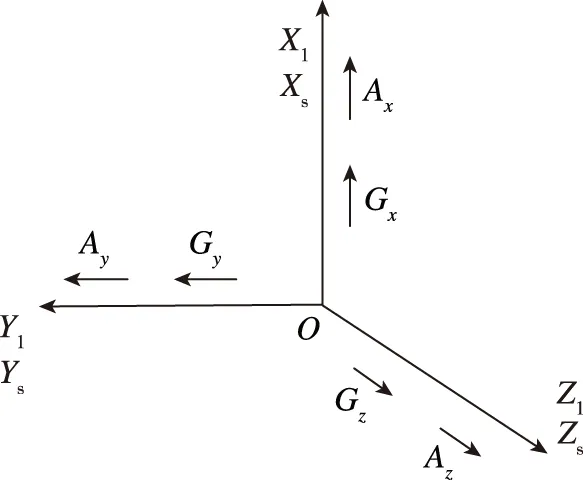
圖1 慣性儀表安裝定向示意圖Fig.1 Installation orientation of inertial instruments
正十二面體的12個表面均為正五邊形,且兩兩平行。儀表敏感軸線與各面法線一致,且對應的陀螺和加速度計配置在相互平行的一對表面上。 正十二面體儀表冗余構型方案的系統測量矩陣如式(1)所示,儀表配置角度如圖2所示。
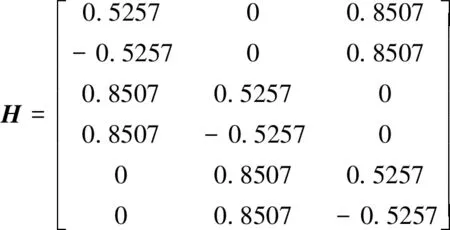
(1)
圖2 正十二面體構型方案Fig.2 Redundant configuration of dodecahedron
多表冗余慣導系統導航性能最優的充分必要條件是系統測量矩陣H滿足式(2),其中n是陀螺或者加速度計的個數[9-10],十二表冗余慣導系統n=6。同時在綜合考慮導航性能及FDI性能兩項指標的情況下,正十二面體方案為十二表冗余配置的最優配置方案。
(2)
1.2 基于正十二面體儀表構型的激光慣導樣機設計
基于正十二面體儀表構型,設計并制造了慣導樣機,其中慣性測量單元(Inertial Measurement Unit,IMU)集成安裝了激光陀螺和石英加速度計,是激光慣導的核心部分。所制造的樣機及IMU分別如圖3和圖4所示。
圖3 十二表冗余激光慣導樣機Fig.3 Prototype of the 12-sensor redundant SINS
圖4 慣性測量單元Fig.4 IMU
IMU采用八點式內減振設計,儀表選用6只北京航天時代激光導航技術有限責任公司設計生產的50型一體化機抖式激光陀螺(陀螺精度優于0.01(°)/h)和6只高精度加速度計。
2 基于最小二乘估計的數據融合算法
最小二乘估計(Least Square Estimation, LSE)是高斯(Karl Gauss)在1795年為測定行星軌道而提出的參數估計算法。這種估計的特點是算法簡單,不必知道與被估計量及量測量有關的任何統計信息[11]。最小二乘估計至今仍是工程領域十分常用也非常有效的一種最優估計算法。美國國家航空航天局(National Aeronautics and Space Administration,NASA)的空間慣性參考單元(Space Inertial Reference Unit,SIRU)項目使用加權最小二乘算法進行冗余儀表的數據融合[12]。
2.1 十二表系統數據處理流程
十二表系統在導航解算過程中的數據處理流程是:首先搭載在飛行器上的慣導系統在飛行器發射和飛行過程中,各冗余儀表以一定的采樣周期實時輸出動態測量信息;然后根據冗余儀表輸出,通過數據融合技術獲得飛行器三軸角增量Δθ和速度增量ΔV;然后通過自對準獲得飛行器初始姿態;最后進行導航解算獲得飛行器實時位置和姿態信息。主要數據處理流程如圖5所示。

圖5 數據處理流程Fig.5 Data processing flow
2.2 基于最小二乘的數據融合算法
對于測量系統
Zm=Hm×nXn+Vm
(3)
其中,Xn為n維狀態矢量;Zm為m維量測量;Hm×n為量測矩陣,m>n;Vm為測量噪聲,其均值為0,方差陣為R。Xn的最小二乘估計為
一般情況下最小二乘估計的精度不高,原因之一是其不分優劣地使用了所有測量值,特別是當多組測量數據中某組數據精度顯著低于其他數據時,最小二乘的估計效果甚至不如只使用其中一組高精度測量值時好。當對不同測量值的質量有所了解,可根據其精度質量通過加權的方法進行區別對待,能夠有效提高估計精度。式(3)中Xn的加權最小二乘(Weighted Least Squares Estimator, WLSE)估計為
其中,W為適當取值的正定加權矩陣。
如果取W=R-1,則稱為馬爾柯夫估計,馬爾柯夫估計的均方誤差比任何其他加權最小二乘估計的均方誤差都要小。
十二表系統測量方程可以簡化表示為
(4)
其中,Ng和Na分別為陀螺和加速度計的測量輸出;Kg和Ka分別為陀螺和加速度計的當量;Dg和Da分別為陀螺和加速度計零偏;dt為系統采樣時間間隔;Hg和Ha分別為陀螺和加速度計的測量矩陣;Vg和Va分別為陀螺和加速度計的測量噪聲,且均值為0,方差陣分別為Rg和Ra。
則,Δθ和ΔV的最小二乘估計為
(5)
Δθ和ΔV的加權最小二乘估計為
(6)
Δθ和ΔV的馬爾柯夫估計為
(7)
2.3 十二表系統最小二乘估計的精度分析

對于采用儀表冗余設計的十二表系統,系統冗余度為6,采用直接對比法最多可以診斷和隔離2度故障,采用解析冗余算法最多可以診斷和隔離3度故障。因此對于十二表系統,以姿態解算為例,只要發生故障的陀螺不大于3只,系統就能完成姿態導航解算。當故障儀表數量增加時,一方面系統測量信息減少,另一方面系統測量矩陣惡化,這將導致系統精度的惡化。因此,當某只儀表發生故障時,根據其安裝位置或測量向量,特定坐標軸上(精度最差軸)的精度損失更大。因此對系統故障陀螺或加速度計數量分別為0只、1只、2只和3只時系統的精度情況進行分析,結果如表1所示。
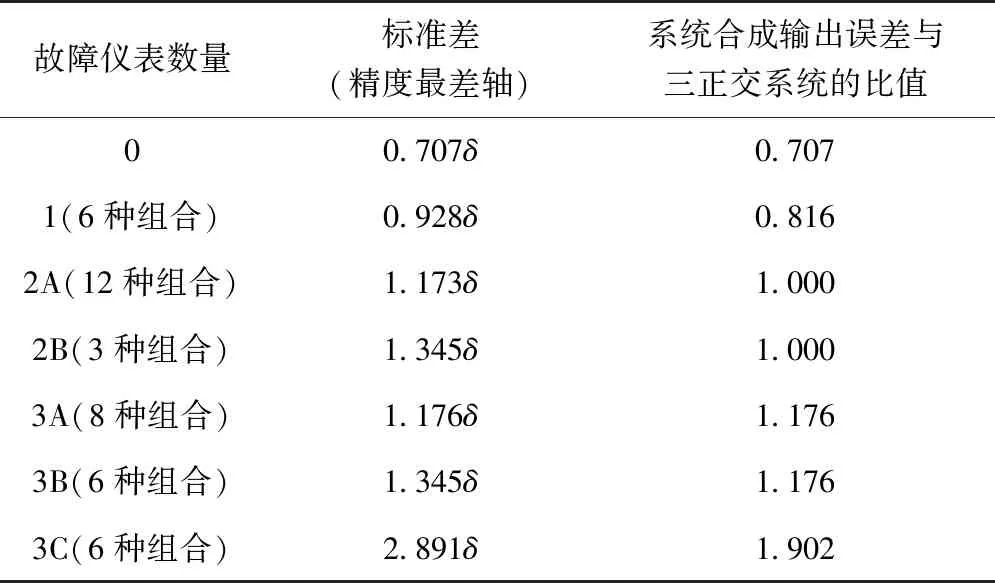
表1 不同故障模式下系統精度表現
從表1中可以看出,隨著故障儀表數量的增加,系統合成輸出誤差逐漸增大,當系統無故障或只有1只儀表故障時,系統精度顯著優于同精度儀表構成的三正交系統。不同故障模式下,各軸輸出精度差異明顯,極端模式下只有2只儀表故障(2B)時單軸輸出精度甚至比3只儀表故障(3A)更低。但整體上,除極少數情況(3C)外,系統精度均優于三正交系統或與之相當。
3 數據融合算法的Monte Carlo仿真
為驗證基于最小二乘估計的數據融合算法的有效性,編寫了Matlab仿真計算程序,模擬十二表系統靜態導航試驗,并在儀表輸出中加入白噪聲以反映儀表測量誤差情況。設計了四組對比仿真,如下:
第一組,使用如圖2所示的m1、m3、m5這3只儀表的數據,無需數據融合直接解算,這種儀表選擇也是正十二面體構型中精度最高的三表組合方式[13];
第二組,使用六表數據和最小二乘估計的數據融合算法,第一、二組仿真中各儀表精度相同,并且在一次Monte Carlo打靶中使用同一組仿真數據;
第三組,同樣使用六表數據和最小二乘估計的數據融合算法;
第四組,使用六表數據和馬爾柯夫估計的數據融合算法,第三、四組仿真中提高m3陀螺/加速度計的噪聲方差,其余儀表精度相同且與第一、二組仿真一致,第三、四組仿真在一次Monte Carlo打靶中使用同一組仿真數據。
每組進行500次Monte Carlo打靶,統計導航結果中位置誤差和姿態誤差的均值,如表2所示。從表2仿真結果中可以看出,當各儀表精度相同時,使用最小二乘估計的數據融合算法能夠有效降低系統導航的位置誤差和姿態誤差;但當各儀表精度不完全一致時,最小二乘估計的數據融合質量顯著下降,此時使用馬爾柯夫估計根據各儀表輸出數據的噪聲方差情況對冗余儀表數據進行加權,完成數據融合之后,仍能有效降低系統導航誤差,且位置和姿態誤差顯著優于三表直接解算。
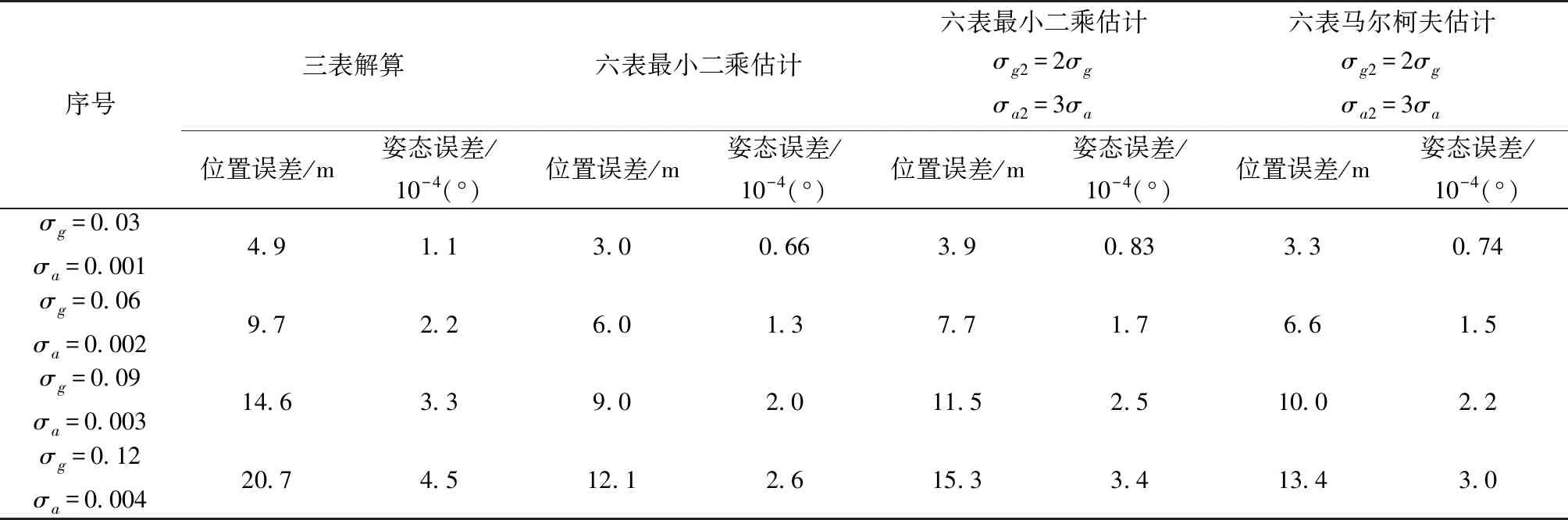
表2 不同數據融合算法的Monte Carlo仿真結果
上述仿真計算驗證了使用最小二乘估計進行數據融合對提高多表冗余慣導系統導航精度的有效性。同時由于實際工程應用中各儀表精度并不完全一致,因此如何評價和加權使用各表數據輸出,是提高基于最小二乘估計的數據融合算法性能的關鍵。
4 基于樣機靜態導航試驗的數據融合算法測試
基于所制造的十二表系統實物樣機,開展了靜態導航試驗,對基于最小二乘估計的數據融合算法的性能進行了測試。
樣機靜態導航試驗的流程是,首先通過標定獲得系統諸元;然后將樣機放置在大理石平板進行靜態數據采集,存儲各儀表輸出;最后使用離線程序,根據如圖4所示的數據處理流程,完成導航解算,獲得靜態導航的位置和姿態誤差。靜態導航試驗進行了6組,每組數據長度15min,其中前5min數據用于完成系統自對準,后10min數據用于導航解算,采樣間隔5ms。
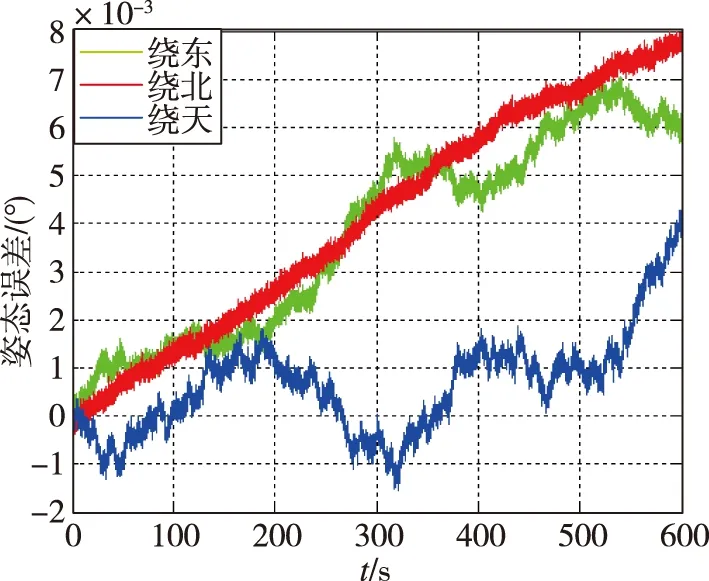
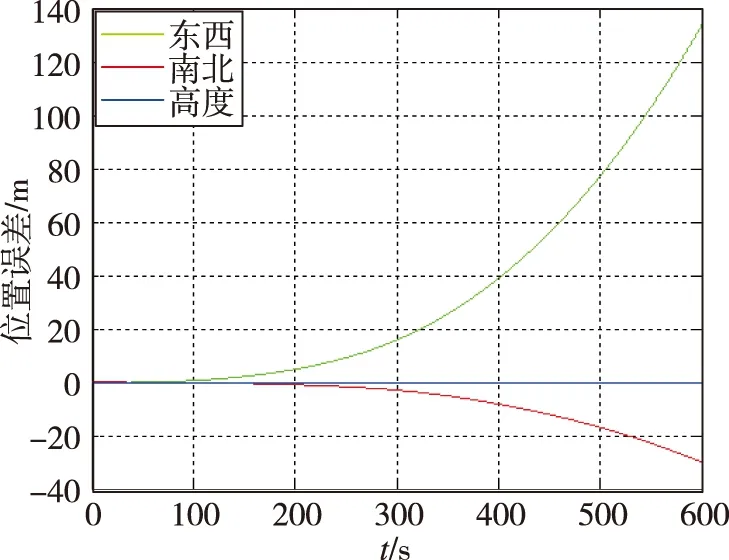
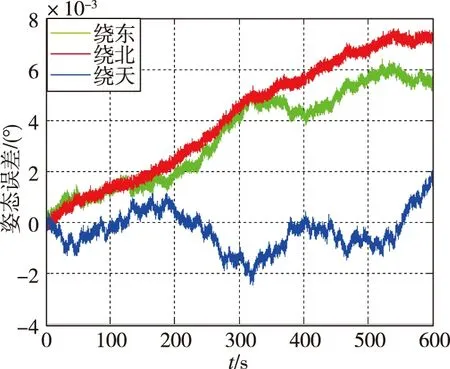
對每組試驗數據分別進行三表直接解算(儀表選擇方案與仿真相同)、六表采用最小二乘估計進行數據融合和六表采用馬爾柯夫估計進行數據融合,三種不同方式獲得的系統三軸角增量Δθ和速度增量ΔV,最終導航誤差結果如表3所示。其中第一組試驗數據采用不同數據融合方式的導航誤差曲線如圖6~圖8所示。從結果中可以看出,由于樣機各表精度情況相差較大,因此采用最小二乘估計的方法進行數據融合之后,樣機的導航誤差顯著大于三表直接解算;而采用馬爾柯夫估計的數據融合算法,最終樣機導航誤差比最小二乘估計的數據融合算法略有降低,但仍顯著大于三表直接解算。
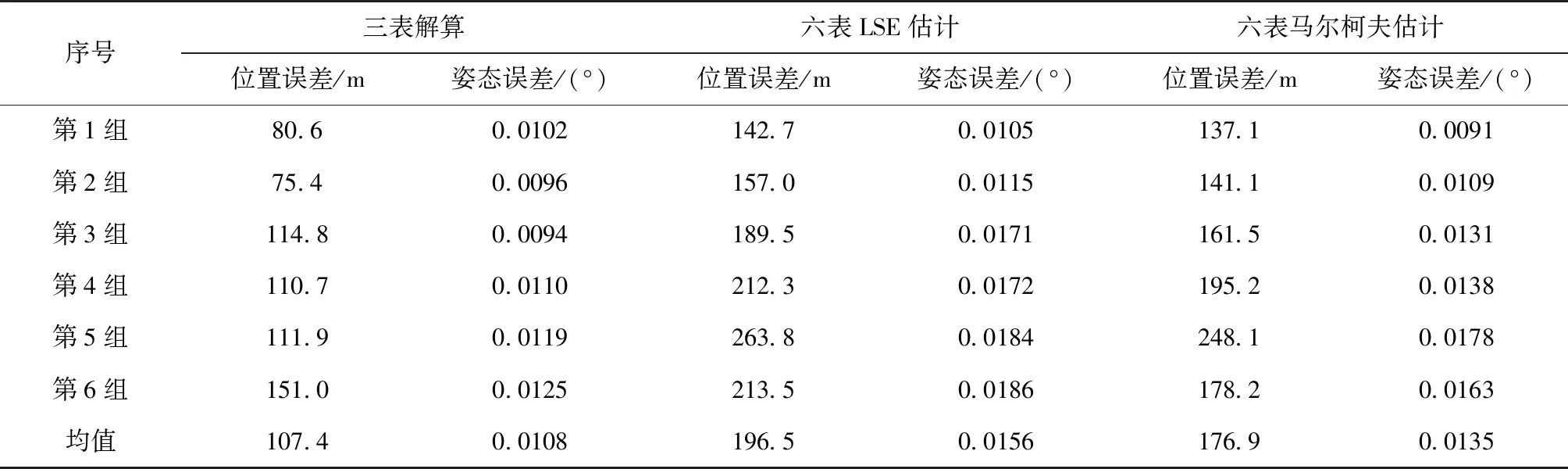
表3 不同數據融合算法的靜態導航試驗結果
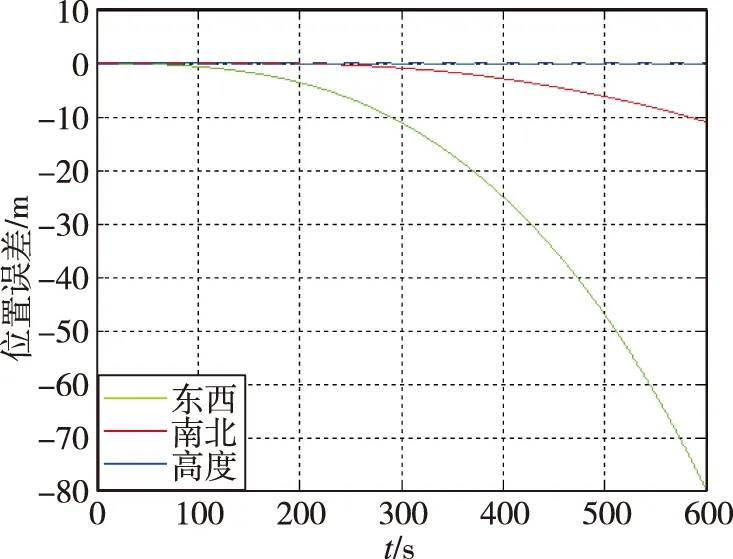
(a)位置誤差
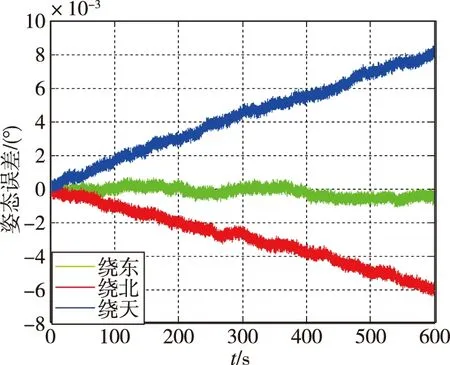
(b)姿態誤差
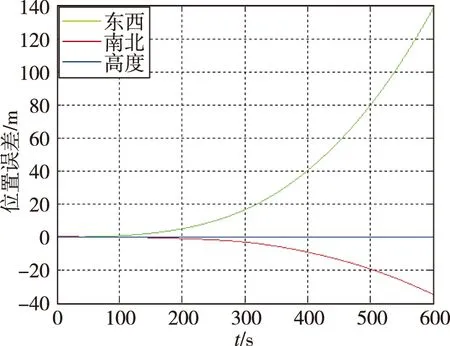
(a)位置誤差
(b)姿態誤差
(a)位置誤差
(b)姿態誤差
5 加權系數的優化改進
上述試驗結果顯示,采用馬爾柯夫估計數據融合算法的導航精度沒有明顯改善,與理論和前述仿真結果矛盾。對儀表的輸出數據進行仔細分析發現,由于所選用陀螺和加速度計均為積分儀表和脈沖輸出的形式,其在一個采樣周期內只有累加到足夠(一個當量)的角增量或者速度增量,才會有脈沖輸出,否則累加到下一個采樣周期。而靜態導航下儀表只敏感到地球重力加速度和自轉角速度且采樣周期只有5ms,導致一個采樣周期內儀表沒有足夠輸出。試驗中儀表的一段輸出數據如表4所示,其中A1~A6為加速度計的輸出,G1~G6為陀螺輸出。從表4中可以看出,儀表原始輸出受采樣影響明顯,因此對儀表數據直接取方差時并不能代表儀表的真實噪聲水平和數據質量,這是導致馬爾柯夫估計失效的原因。

表4 儀表5ms脈沖增量輸出
在慣性導航中,影響導航精度的儀表參數主要是陀螺的零偏穩定性、加速度計的零偏穩定性和當量誤差,其中儀表的零偏穩定性比較容易準確獲得。因此選擇各儀表零偏穩定性參數作為加權系數,構造加權矩陣如式(8)所示,其中Ω1,…,Ω6為6只陀螺或加速度計的零偏穩定性。
(8)
使用構造的加權矩陣,根據式(6)完成數據融合,重新對6組樣機靜態導航試驗數據進行處理,得到系統導航誤差,如表5所示,其中第一組數據的導航誤差曲線如圖9所示。從結果中可以看出,優化加權系數后樣機的導航精度顯著提升,六組靜態導航試驗數據的平均位置誤差和姿態誤差分別只有23.0m和0.0024°,與三表直接解算相比位置誤差和姿態誤差分別降低了78.6%和77.9%,且與由3只90型高精度激光陀螺(精度優于0.005(°)/h)和3只同型高精度加速度計組成的三正交慣導系統的導航精度相當。
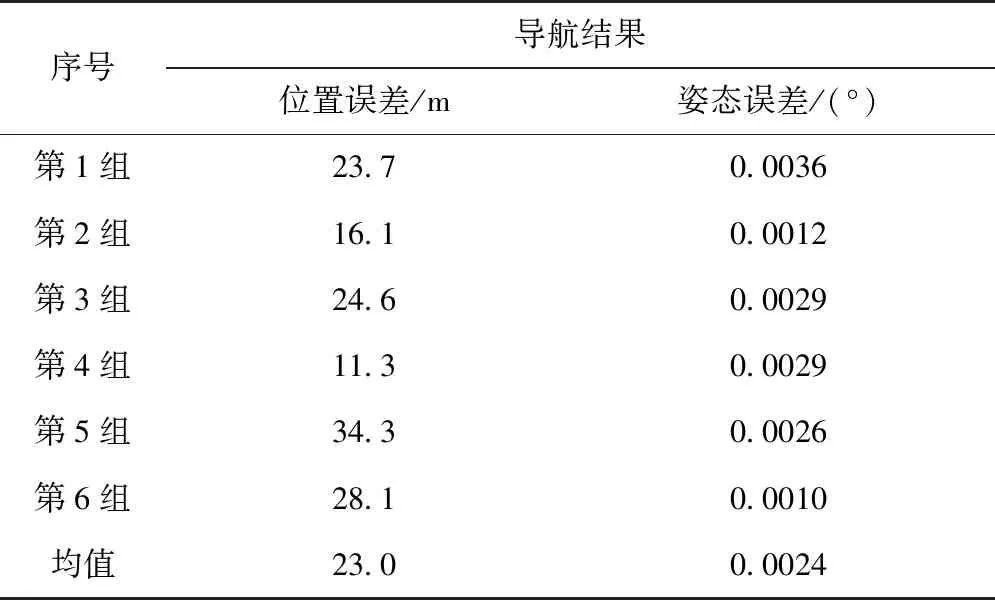
表5 優化加權系數的WLSE數據融合算法的樣機靜態導航試驗結果
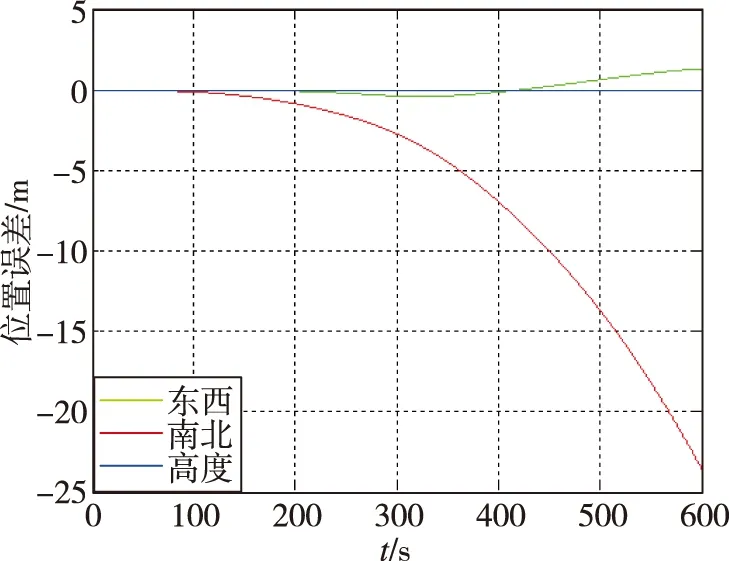
(a)位置誤差

(b)姿態誤差
6 結論
多表冗余慣性導航系統可以通過數據融合技術,充分利用冗余儀表的數據,達到提高系統的導航精度的目的。本文針對采用正十二面體冗余儀表構型的十二表冗余激光捷聯慣性導航系統,通過仿真和樣機試驗,開展了基于最小二乘估計的數據融合算法研究;分析了不同故障模式下的系統精度變化,并通過Monte Carlo仿真驗證了數據融合算法對提高系統導航精度的有效性;設計開展了樣機靜態導航試驗,試驗結果表明,理論最優的馬爾柯夫估計并不完全適用于脈沖輸出形式儀表的數據融合;最后通過優化改進加權系數和構造加權矩陣,顯著提升了樣機的靜態導航精度:樣機位置誤差和姿態誤差與三表直接解算相比分別降低了78.6%和77.9%。6組試驗的平均誤差只有23.0m和0.0024°,這與由3只90型高精度激光陀螺和3只同型高精度加速度計組成的三正交慣導系統的導航精度相當。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
裝備制造技術(2019年12期)2019-12-25 03:06:46
