半球諧振陀螺全角模式控制技術(shù)研究
2019-12-11 03:54:40趙萬(wàn)良李紹良成宇翔宋麗君
導(dǎo)航定位與授時(shí) 2019年6期
關(guān)鍵詞:振動(dòng)
趙萬(wàn)良,楊 浩,王 偉,李紹良,成宇翔,宋麗君
(1.南京理工大學(xué),南京 210094;2上海航天控制技術(shù)研究所,上海 201109;3.上海慣性工程技術(shù)研究中心,上海 201109;4.西安建筑科技大學(xué),西安 710055)
0 引言
半球諧振陀螺(Hemispherical Resonator Gyroscope, HRG)是一種高精度、高可靠性、長(zhǎng)壽命的慣導(dǎo)級(jí)固體陀螺儀,通常由熔融石英諧振子、檢測(cè)基座和激勵(lì)罩三部分組成。它是利用半球諧振子的振動(dòng)駐波(振動(dòng)頻率通常為4000~8000Hz)進(jìn)動(dòng)效應(yīng)來(lái)感測(cè)陀螺載體旋轉(zhuǎn)的一種振動(dòng)陀螺,目前已在航天、航海、戰(zhàn)術(shù)等領(lǐng)域獲得了廣泛的應(yīng)用[1-4]。根據(jù)測(cè)量角速度或者角度,半球諧振陀螺可分為力平衡和全角兩種工作模式。全角模式是一種新型半球諧振陀螺工作模式,在該工作模式下,諧振子上的振動(dòng)駐波像傅科擺一樣自由進(jìn)動(dòng),駐波的進(jìn)動(dòng)角θ與陀螺載體的轉(zhuǎn)動(dòng)角φ呈嚴(yán)格的比例關(guān)系
θ=kφ
其中,k表示進(jìn)動(dòng)因子。
工作在全角模式下的半球諧振陀螺有以下技術(shù)特點(diǎn):首先能夠直接對(duì)轉(zhuǎn)動(dòng)角度進(jìn)行測(cè)量,可有效減小由角速度隨機(jī)游走帶來(lái)的測(cè)量誤差積累;其次由于無(wú)需力平衡作用抵消角速度引起的進(jìn)動(dòng),理論上具有無(wú)限的檢測(cè)帶寬和動(dòng)態(tài)范圍;另外由于進(jìn)動(dòng)因子僅取決于諧振子結(jié)構(gòu),因此具有極高的標(biāo)度因子穩(wěn)定度和線性度。
但為了使諧振子的振動(dòng)駐波自由進(jìn)動(dòng),要求諧振子的激勵(lì)方式不能綁定駐波方位,這使得全角模式下半球諧振陀螺的控制更加復(fù)雜。本文針對(duì)全角模式下半球諧振陀螺的控制理論、控制系統(tǒng)以及測(cè)量結(jié)果進(jìn)行了介紹。
1 半球諧振陀螺全角模式控制理論
1.1 參數(shù)激勵(lì)下的動(dòng)力學(xué)方程
為實(shí)現(xiàn)全角模式半球諧振陀螺的速率積分功能,使諧振子駐波能夠自由進(jìn)動(dòng),由于傳統(tǒng)力平衡模式的位置激勵(lì)會(huì)使駐波綁定,不再適用于全角模式,因而須對(duì)諧振子采用參數(shù)激勵(lì)方式。為便于計(jì)算,采用環(huán)形模型進(jìn)行介紹。設(shè)參數(shù)激勵(lì)電壓為V=V0cosωt,則參數(shù)激勵(lì)條件下,環(huán)形模型諧振子的二階動(dòng)力學(xué)方程為

(1)

w(φ,t)=x(t)cos2φ+y(t)sin2φ
(2)
將式(2)代入方程式(1)中,并使用布勃諾夫-加廖爾金法,得到方程組為

(3)
其中,Ω為載體平臺(tái)轉(zhuǎn)動(dòng)速度,k為諧振子進(jìn)動(dòng)因子,對(duì)于環(huán)形模型k=0.4,ω0為陀螺諧振子固有振動(dòng)頻率,x和y為2個(gè)相互正交的信號(hào)軸向上的振動(dòng)信號(hào)。在半球諧振陀螺中,x和y的幾何放置位置相差45°。方程式(3)的解可以寫為[5-8]
(4)
得出慢變量P、A、Q、B的演化方程為
(5)

1.2 參數(shù)激勵(lì)下的穩(wěn)定邊界條件
為使諧振子能夠存在有限的穩(wěn)定振動(dòng),要求
(6)
即
(7)
式(7)即確定了參數(shù)激勵(lì)下諧振子的穩(wěn)定邊界條件。
如圖1所示,在雙曲線內(nèi)的區(qū)域Ⅰ上,諧振子振動(dòng)理想條件下將無(wú)限增長(zhǎng);在雙曲線外的區(qū)域Ⅱ上,諧振子振動(dòng)將逐漸衰減;當(dāng)且僅當(dāng)激勵(lì)參數(shù)在穩(wěn)定邊界上時(shí),諧振子的振動(dòng)能夠穩(wěn)定。為使激勵(lì)電壓達(dá)到最小值,此時(shí)激勵(lì)參數(shù)應(yīng)滿足以下條件

(8)
即對(duì)應(yīng)的激勵(lì)頻率和激勵(lì)電壓分別為
(9)
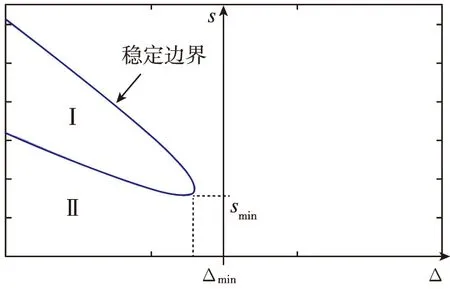
圖1 參數(shù)激勵(lì)的諧振子振動(dòng)穩(wěn)定邊界Fig.1 Parameter excited harmonic oscillator vibration stability boundary
2 控制理論分析與仿真
2.1 駐波進(jìn)動(dòng)分析
在式(9)的激勵(lì)條件下,方程式(5)化為
(10)
諧振子的振動(dòng)可以寫成如下形式
w(φ,t)=x(t)cos2φ+y(t)sin2φ=(Acosωt+Psinωt)cos2φ+(Bcosωt+Qsinωt)sin2φ
若?表示駐波方位,則駐波方位角的變化為
利用方程式(10),得到
(11)
或?qū)κ?11)進(jìn)行積分后,有
(12)
可以看出,當(dāng)有角速度輸入時(shí),駐波方位的轉(zhuǎn)角與陀螺殼體的轉(zhuǎn)角成比例,此時(shí)半球諧振陀螺將工作在全角模式下,諧振子駐波自由進(jìn)動(dòng),實(shí)現(xiàn)了對(duì)殼體轉(zhuǎn)角的直接敏感。
若存在阻尼不均勻性時(shí),進(jìn)動(dòng)方程式(9)變?yōu)閇9]

(13)
式中,ξ4為阻尼不均勻性的幅值,φ4為阻尼不均勻的方位。
2.2 控制效果分析
對(duì)上述理論進(jìn)行仿真分析,當(dāng)未進(jìn)行參數(shù)激勵(lì)與正交控制時(shí),半球陀螺儀的x路與y路的信號(hào)輸出仿真結(jié)果如圖2(a)所示,此時(shí)諧振子的總能量在衰減,且正交分量隨著時(shí)間出現(xiàn)振蕩,此時(shí)陀螺儀將引入較大的零位漂移和測(cè)量誤差。在按照式(9)進(jìn)行參數(shù)激勵(lì)后,進(jìn)行正交控制,仿真結(jié)果如圖2(b)所示,可以看出,諧振子總能量逐漸趨于穩(wěn)定,正交分量的增長(zhǎng)被抑制。
圖2(c)所示為轉(zhuǎn)速為300(°)/s時(shí),振型方位角的進(jìn)動(dòng)仿真結(jié)果,表明參數(shù)激勵(lì)條件下,有角速度輸入時(shí),諧振子的振型方位角處于自由進(jìn)動(dòng)狀態(tài),且振型方位角與外界輸入角速度為嚴(yán)格線性關(guān)系,因而陀螺儀工作在全角模式。圖2(d)所示為存在有Q值不均勻性時(shí),陀螺儀的角度解算誤差仿真結(jié)果。可以看出,解算誤差隨著振型方位呈周期性變化,變化周期為90°。
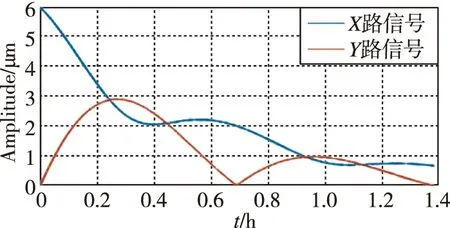
(a) 無(wú)能量補(bǔ)償及正交控制時(shí),X路與Y路信號(hào)幅值輸出
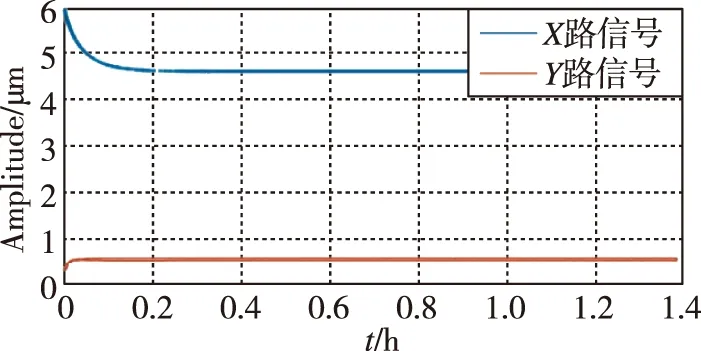
(b) 有能量補(bǔ)償及正交控制時(shí),X路與Y路信號(hào)幅值輸出
(c) 300(°)/s轉(zhuǎn)速下振型進(jìn)動(dòng)
(d) 300(°)/s轉(zhuǎn)速下Q值不均勻引入的解算誤差
3 半球諧振陀螺全角模式控制方案
為生成所需要的控制信號(hào),利用參考信號(hào)對(duì)檢測(cè)信號(hào)X、Y通過(guò)乘法相干解調(diào)后,分別得到振型參數(shù)Cx、Cy、Sx、Sy,利用Cx、Cy、Sx、Sy進(jìn)行組合運(yùn)算,得到所需要的控制判斷量,分別為[10]

(14)
則E表征當(dāng)前諧振子振動(dòng)的總能量,該值與設(shè)定幅值E0的差值形成能量控制誤差信號(hào),用于對(duì)幅度的控制;Q表征陀螺振動(dòng)模態(tài)正交誤差量的大小,用于對(duì)正交誤差的控制;L用于實(shí)現(xiàn)對(duì)諧振子頻率的跟蹤;S、R表征振型方位,且振型方位角為
(15)
形成控制量以后,將控制量與判斷量進(jìn)行比較,并按照式(9)進(jìn)行驅(qū)動(dòng)合成和調(diào)制,進(jìn)而生成控制電壓,作用到半球諧振陀螺的控制電極上,實(shí)現(xiàn)對(duì)半球諧振陀螺的參數(shù)激勵(lì)控制,如圖3所示。
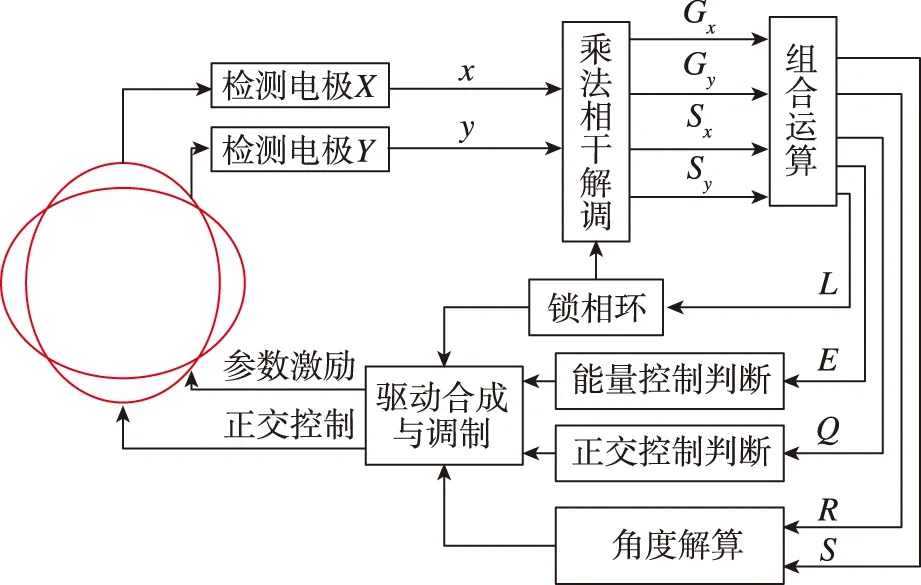
圖3 基于參數(shù)激勵(lì)的全角模式控制方案[11]Fig.3 Whole-angle mode control scheme based on parameter excitation
4 實(shí)驗(yàn)
4.1 實(shí)驗(yàn)裝置
利用第3節(jié)所述算法設(shè)計(jì)硬件系統(tǒng)并加以實(shí)現(xiàn)。全角模式半球諧振陀螺系統(tǒng)的硬件結(jié)構(gòu)由信號(hào)檢測(cè)硬件接口、驅(qū)動(dòng)輸出硬件接口、基于FPGA的數(shù)字硬件系統(tǒng)以及輔助外圍電路組成。其中信號(hào)檢測(cè)硬件接口和驅(qū)動(dòng)輸出硬件接口兩部分屬于模擬電路系統(tǒng),用于實(shí)現(xiàn)系統(tǒng)與陀螺表頭之間的信號(hào)交互;基于FPGA的數(shù)字硬件系統(tǒng)為數(shù)字電路系統(tǒng),用于實(shí)現(xiàn)陀螺工作流程的控制、數(shù)字信號(hào)處理與控制算法實(shí)現(xiàn)以及外設(shè)通信接口功能;輔助配套電路包括電源模塊、通信芯片、保護(hù)隔離器件等。硬件系統(tǒng)的實(shí)物圖如圖4所示。
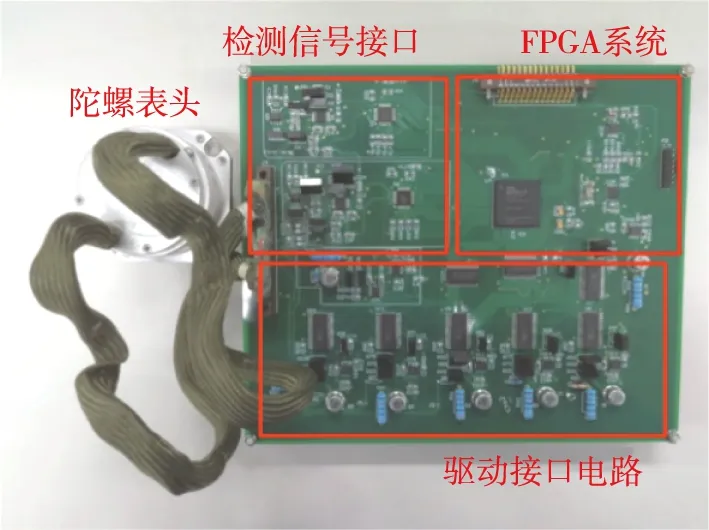
圖4 全角模式半球諧振陀螺硬件電路系統(tǒng)Fig.4 Whole-angle mode hemispherical resonator gyro hardware circuit system
FPGA是全角模式半球諧振陀螺信號(hào)處理與控制算法的載體與核心。本課題選用Xilinx公司ARTIX系列第7代FPGA產(chǎn)品xc7a35t,在該器件的基礎(chǔ)上實(shí)現(xiàn)了陀螺系統(tǒng)的信號(hào)運(yùn)算、控制與信號(hào)交互。FPGA數(shù)字系統(tǒng)的功能組成結(jié)構(gòu)圖如圖5所示。
4.2 實(shí)驗(yàn)結(jié)果及分析
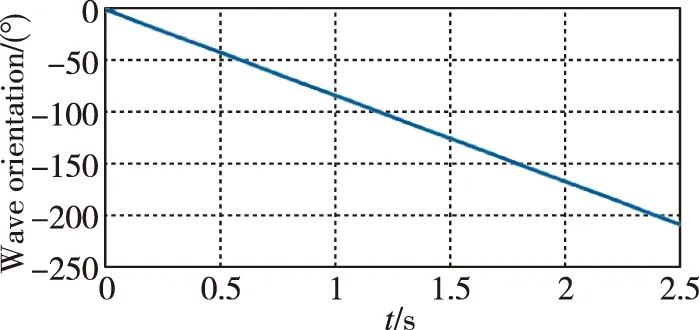
圖6所示為全角模式半球諧振陀螺實(shí)驗(yàn)結(jié)果。圖6(a)表明能量逐漸收斂到3.2×105bit,表明在參數(shù)激勵(lì)作用下,控制系統(tǒng)實(shí)現(xiàn)了對(duì)諧振子振動(dòng)能量的控制。在能量達(dá)到穩(wěn)定后,使轉(zhuǎn)臺(tái)轉(zhuǎn)速為300(°)/s,陀螺儀的振型方位變化如圖6(b)所示,由于三角函數(shù)求解時(shí),角度輸出隨時(shí)間呈鋸齒變化。對(duì)測(cè)量的振型方位角進(jìn)行線性化,并對(duì)轉(zhuǎn)臺(tái)轉(zhuǎn)速穩(wěn)定后的數(shù)據(jù)進(jìn)行線性擬合,得到圖6(c),表明在大動(dòng)態(tài)角速度輸入下,陀螺儀在0°~360°范圍內(nèi)實(shí)現(xiàn)了對(duì)旋轉(zhuǎn)角度的實(shí)時(shí)敏感,擬合后的結(jié)果為
θ=-0.275φ+182.1
(16)
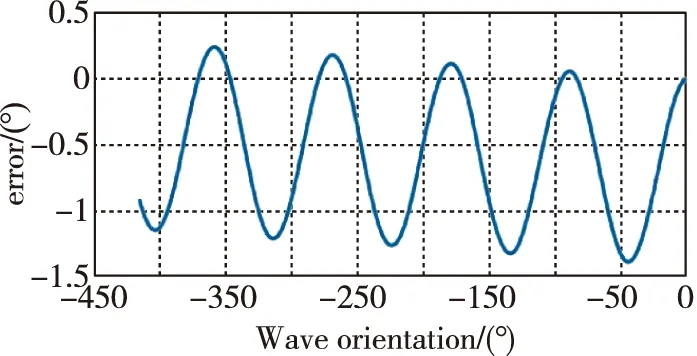
擬合線性相關(guān)系數(shù)大于0.9999。因此該陀螺的進(jìn)動(dòng)因子為0.275,與基于環(huán)形模型的理論進(jìn)動(dòng)因子0.4相比誤差較大,與基于半球殼模型的理論進(jìn)動(dòng)因子0.277基本一致[12-13],線性度優(yōu)于10-4。圖6(d)所示為不同振型方位下的轉(zhuǎn)動(dòng)角度解算誤差量,解算誤差量隨著方位角做周期性變化,變化周期為90°,由仿真結(jié)果可知,該誤差是由阻尼不均勻引起的。
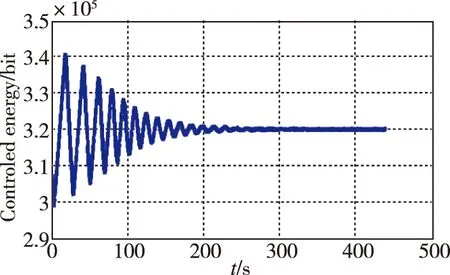
(a) 能量收斂過(guò)程
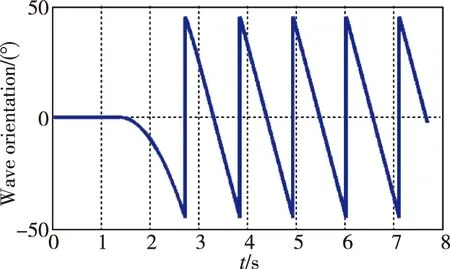
(b) 轉(zhuǎn)速300(°)/s振型方位變化情況
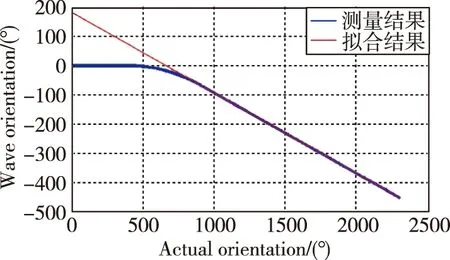
(c) 實(shí)際轉(zhuǎn)動(dòng)角度與振型方位角的關(guān)系
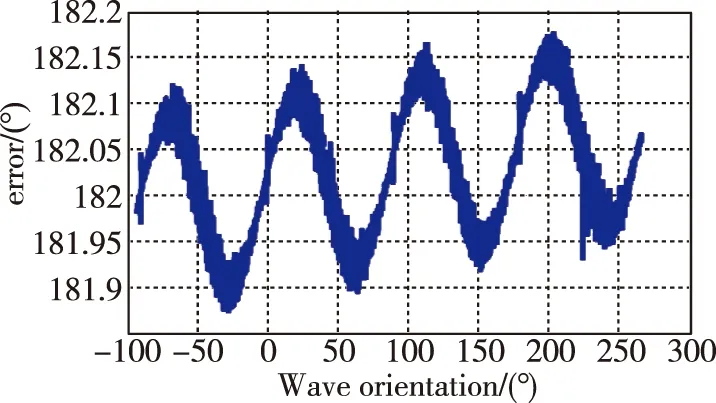
(d) 不同振型方位角下的解算誤差
5 結(jié)論
本文研究了全角模式半球諧振陀螺,介紹了全角模式半球諧振陀螺的基本理論,并利用參數(shù)激勵(lì)的方法實(shí)現(xiàn)了半球諧振陀螺全角模式的測(cè)量功能。測(cè)試結(jié)果表明,測(cè)量角速度可達(dá)300(°)/s,線性度優(yōu)于10-4,后續(xù)將需著力于漂移抑制以及控制系統(tǒng)性能的提升。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
