永磁同步電機調速系統的滑模控制研究
2019-12-10 09:30:06呂敬高宋錚
中國科技縱橫 2019年20期
關鍵詞:永磁同步電機
呂敬高 宋錚
摘 要:本文主要研究了一種可以降低調速系統誤差的滑模控制系統,本系統以控制過程中產生的動態誤差為性能指標的控制方法,在此基礎上建立最優切換函數,并采用最優控制理論對滑模控制器進行設計。用該方法設計的滑模控制系統,通過滑模面斜率的連續變化,能夠加速系統狀態變量到達滑模面的過程,極大地提高對參數攝動和外部干擾的魯棒性。仿真結果表明,該時變滑模面控制方法使系統具有無超調、快速、穩定等優點。
關鍵詞:永磁同步電機;調速系統;滑模控制
中圖分類號:TM351 文獻標識碼:A 文章編號:1671-2064(2019)20-0062-02
0 引言
隨著伺服系統的研發,其精度高、速度范圍寬的有點極大的方便了永磁同步電動機控制系統的制作。加上其模型變量的非線性和強耦合性,使其能夠適用于各種復雜環境,但是,由于其電動機參數的可變性,使其運轉會經常受到干擾。所以,對于永磁電動機調速系統滑模控制的研究也越來越重要。本文引入SVPWM技術和閉環控制方法設計了永磁同步電機滑模控制器,并通過串口與上位機通信,形成了多機系統結構。通過設計電流環和速度環雙閉環控制系統,利用MATLAB建立了永磁同步電機的軟件仿真模型,并在給定的仿真參數下完成了電機的位置和速度控制。等設計了基于TMS320F2812的PMSM交流伺服系統,經過后期的仿真實驗證明,該系統的軟硬件系統運行良好。
在上世紀六十年代初期,蘇聯學者提出了滑模變結構控制,這種結構裝置與傳統控制器的區別在于控制的不連續性,加上其非線性的控制方法,使其在實施控制的過程中,能夠被系統更改結構特性,從而實施切換動作。此外,該種滑模控制結構與控制對象的參數和干擾聯系不大,使得滑模變結構控制環節減少,相應速度更快,并且,參數變化影響較小,可以不用在線識別。同時,由于其魯棒性能較好,能夠使控制算法簡單化,所以,在其工作過程中,為復雜的工業控制問題提供簡單的解決方法,因此,非常的適用于永磁同步電機調速系統中滑模控制系統的設計。
1 永磁同步電機的數學模型
與傳統的電動機數學模型相比,永磁同步電動機的數學模型具有無可比擬的優越性,其模型簡便,易于求解,在實際的建模過程中,根據實際數據情況,提出相應的建模假設:假設磁路是線性的;假設字氣隙中,永磁體磁場為正弦分布;核心渦流和磁滯損耗不計算在內,其方程為:
(1)
對于表面式PMSM有,所以有轉矩方程:
(2)
機械運動方程:
(3)
式中:指的是,電壓;
指的是,電流;
指的是,電感;
r指的是,電阻;
P指的是,極對數;
指的是,磁鏈;
指的是,電磁轉矩;
指的是,負載轉矩;
J指的是,轉動慣量;
指的是,轉子電角速度。
2 滑模控制器設計
2.1 趨近律滑模
滑模變結構控制過程包括兩個階段:正常運動和滑動模式。一般滑動模式控制僅考慮接近滑動表面并滿足穩定性條件的能力,但穩定性條件不反映運動的方式。接近的法則可以更好地保證正常運動階段的質量。當遠離開關表面移動時,適當的接近法可以將移動點設計到開關表面,以加速系統的動態響應。
(4)
式中,、k都是大于零的常數。式(4)中令s>0有
(5)
解微分方程得:
(6)
當s>0,s(t)=0時有:
由此可以求得:
(7)
由上式可以看出,參數K能夠在有限的時間內,通過參數大小的變動,影響達到滑動表面的時間。增加K值,其相應速度隨之變快,但是,K值過大,也會產生負面作用,導致滑面速度過大。所以,在實踐中,應考慮K值的變化,將其與實際狀態相結合進行調整。
2.2 控制量的求取
取PMSM系統的狀態變量為
(8)
式中—給定;
—實際轉速。
令A,可得系統的狀態空間:
(9)
設計系統的滑模面S為:
(10)
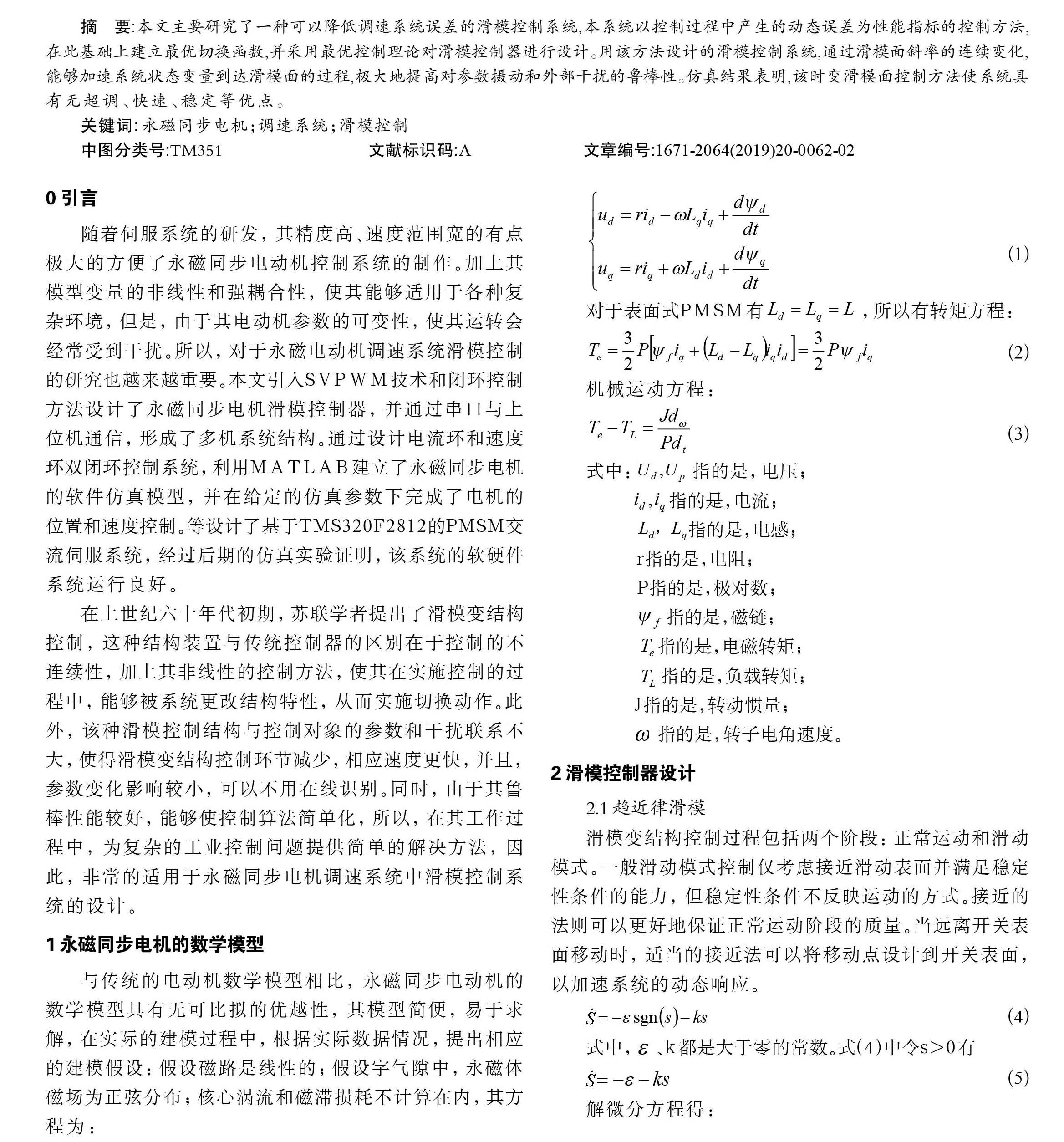
根據公式(5),可以自由選擇指數趨近律,從而控制S形式趨近律法中的控制變量,然后生成下列方程:
(11)
如圖1所示,根據控制變量的結構流程圖,加上DSP編程,能夠簡化方程的求解步驟,提高方程的求解正確率。
當Lyapunov函數為V=時,要想使滑模控制的系統穩定,必須需滿足下面條件:
(12)
保持系統穩定運行的條件是,、k>0,s與為異號。
3 實驗研究
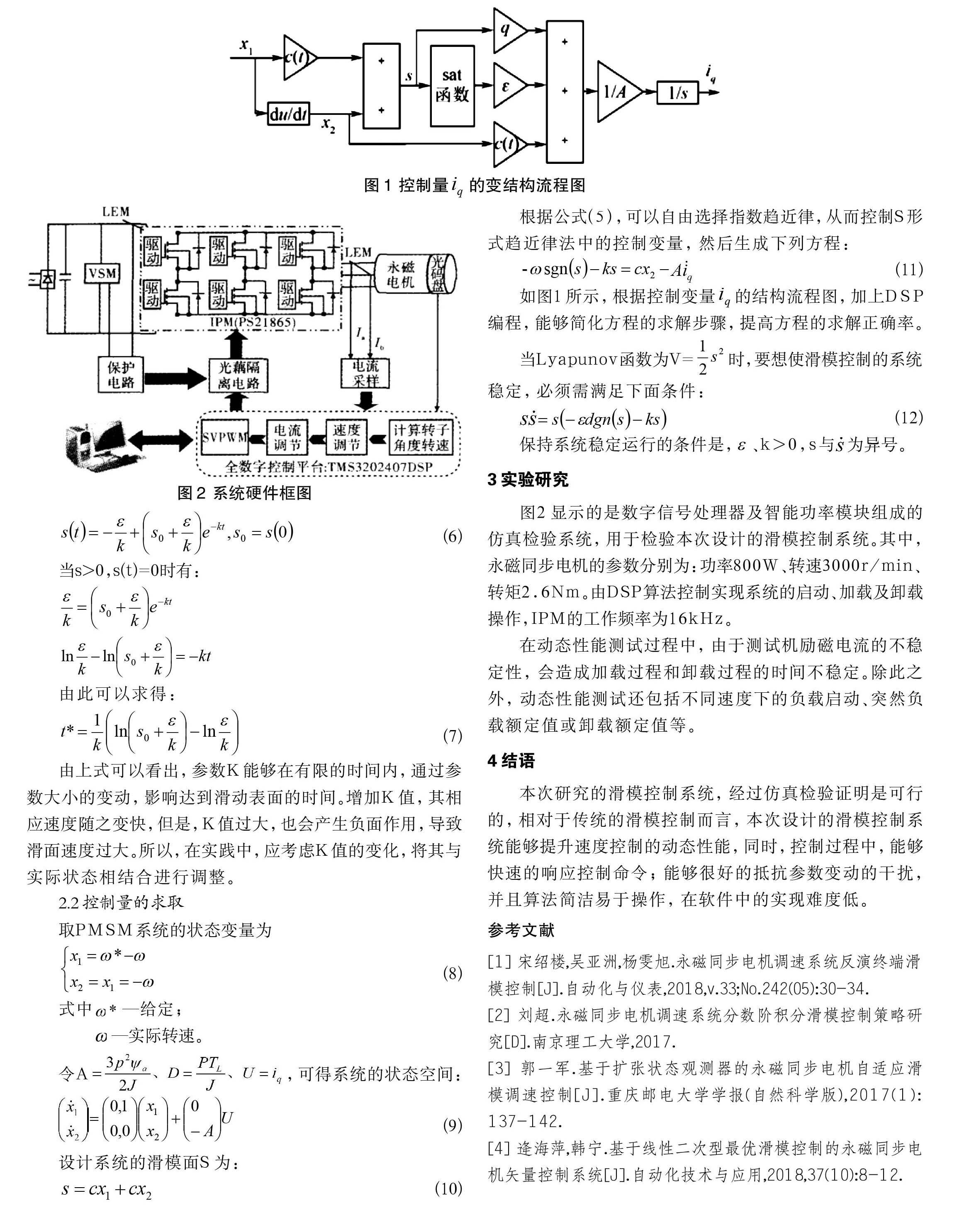
圖2顯示的是數字信號處理器及智能功率模塊組成的仿真檢驗系統,用于檢驗本次設計的滑模控制系統。其中,永磁同步電機的參數分別為:功率800W、轉速3000r/min、轉矩2.6Nm。由DSP算法控制實現系統的啟動、加載及卸載操作,IPM的工作頻率為16kHz。
在動態性能測試過程中,由于測試機勵磁電流的不穩定性,會造成加載過程和卸載過程的時間不穩定。除此之外,動態性能測試還包括不同速度下的負載啟動、突然負載額定值或卸載額定值等。
4 結語
本次研究的滑模控制系統,經過仿真檢驗證明是可行的,相對于傳統的滑模控制而言,本次設計的滑模控制系統能夠提升速度控制的動態性能,同時,控制過程中,能夠快速的響應控制命令;能夠很好的抵抗參數變動的干擾,并且算法簡潔易于操作,在軟件中的實現難度低。
參考文獻
[1] 宋紹樓,吳亞洲,楊雯旭.永磁同步電機調速系統反演終端滑模控制[J].自動化與儀表,2018,v.33;No.242(05):30-34.
[2] 劉超.永磁同步電機調速系統分數階積分滑模控制策略研究[D].南京理工大學,2017.
[3] 郭一軍.基于擴張狀態觀測器的永磁同步電機自適應滑模調速控制[J].重慶郵電大學學報(自然科學版),2017(1):137-142.
[4] 逄海萍,韓寧.基于線性二次型最優滑模控制的永磁同步電機矢量控制系統[J].自動化技術與應用,2018,37(10):8-12.
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49