基于快速原型控制器的過程控制實驗平臺
2019-11-28 06:20:12張政煊夏振興常俊林
實驗技術與管理 2019年11期
代 偉,張政煊,夏振興,常俊林
基于快速原型控制器的過程控制實驗平臺
代 偉,張政煊,夏振興,常俊林
(中國礦業大學 信息與控制工程學院,江蘇 徐州 221116)
以雙容水箱為被控對象,引入快速控制原型技術,結合RTW(Real Time Workshop)/xPC Target工具箱提供的實時仿真環境和基于WPF(Windows Presentation Foundation)的運行監控軟件,開發出一套基于快速原型控制器的過程控制實驗平臺。該平臺支持自動代碼生成和在線調參,提升了控制算法設計與驗證的效率,對于加深學生理解和掌握過程控制系統,提高學生解決復雜工程問題的能力有較好的作用。
快速控制原型技術;過程控制;雙容水箱
在過程控制實驗教學中,大多采用雙容或三容水箱實驗裝置。近年來,一些高校基于STC系列單片機、DDC、DCS、PLC等控制器開發了過程控制實驗平臺[1-2],然而這些平臺存在以下缺點:
(1)控制算法的設計和仿真大多依托Matlab/ Simulink軟件,而上述實驗平臺均采用自身特定的編程語言,如梯形圖,這使得仿真與實驗脫節,難以直接相互轉化;
(2)現有實驗平臺所采用的編程語言,在進行控制算法中的積分、微分、矩陣等運算時,實現起來較為復雜,從而給開展模型預測控制、自適應控制等先進控制算法的實驗教學帶來困難和不便。
為解決上述實驗平臺存在的問題,文獻[3-5]在實驗平臺中引入快速控制原型技術,在可視化編程、代碼自動生成、在線調參、實時狀態趨勢顯示等方面進行了改進,使得控制算法的設計可以快速實現。然而這些改進仍存在設備購置費用高、被控對象不能體現細節等問題。
本文以實物串聯式雙容水箱作為被控對象,利用Matlab的Real-Time Workshop(RTW)組件和x86架構的普通PC機,開發了一套低成本、基于快速原型控制器的過程控制實驗平臺,可以進行模型辨識、比例積分(PI)控制、線性二次型加積分(LQI)控制等實驗。
1 實驗平臺硬件設計
1.1 實驗平臺的總體結構
基于快速原型控制器的過程控制實驗平臺由監控計算機、快速原型控制器和雙容水箱構成,其整體結構如圖1所示。

圖1 實驗平臺系統結構圖
該實驗平臺分為快速控制原型平臺和被控對象系統兩部分。在快速控制原型平臺中,監控計算機同時又和快速原型控制器以雙機工作模式組成快速控制原型平臺。監控計算機運行基于WPF開發的監控軟件,對控制算法下達編譯、下載指令以及操作控制器的連接和啟停狀態,通過以太網傳輸信號和實時顯示運行趨勢,支持在線調參,以得到控制算法的最優參數。
實驗平臺的被控對象系統采用串聯式雙容水箱實驗裝置。在該被控對象系統中,傳感器為電容式液位變送器,定制為0~50 cm的量程和0~5 V單線制輸出,便于電壓量與液位值的轉換,抗干擾能力強、測量精度高,能進行冷端、溫漂、非線性自動補償;執行機構為直流水泵,采用直流電機驅動器來控制抽水流量,驅動器以0~5 V模擬輸入信號調節PWM的占空比。
1.2 快速控制原型平臺搭建
快速控制原型平臺雙機工作模式指的是宿主機-目標機模式。宿主機是通過Simulink完成實時仿真開發環境的計算機,能夠通過VC(Visual C++)編譯器將模型編譯成目標機使用的代碼。目標機是運行實時內核的計算機,用于執行代碼,要求具有較快的運算及處理能力,具有以太網適配卡。
在本平臺中,監控計算機為配有WinXP操作系統的計算機,且安裝有Matlab及其附加產品Simulink和RTW,將其作為宿主機使用,直接在Simulink軟件中采用自帶模塊庫以及自行開發的設備驅動模塊來設計和修改控制算法,并在RTW環境下自動生成可供目標機運行的可執行代碼。
目標機是快速原型控制器,采用x86架構的普通PC機主板,CPU為四代Intel i5處理器,配有2 GB內存,帶有1路RJ45以太網接口、1路USB接口和1路RS232串口,通過PC104總線外擴高速數據采集卡PCI-1716。目標機采用U盤啟動方式,U盤啟動盤裝載了DOS系統和xPC實時內核。
目標機與宿主機之間利用局域網連接起來以進行數據傳輸,傳輸速率高達10 Mbit/s,傳輸距離遠。通過網絡通信的方式將可執行代碼從宿主機下載到目標機中,從而實現Simulink的控制算法模型在目標機中運行。目標機外擴數據采集板卡PCI-1716對信號進行D/A和A/D轉換,輸出模擬調速信號和采集水箱液位信號。
1.3 被控對象系統設計
被控對象為雙容水箱裝置,在工業控制領域有廣泛的實際應用。為了實現有效的分析和控制,需要合理設計系統的結構,結合實際結構建立數學模型,描述雙容水箱液位系統。在本平臺中,雙容水箱采用串聯式結構。水泵作為可調節的輸送源,將儲水槽中的水送入上水箱,再經過手動閥,先流入下水箱,繼而回到儲水槽,形成循環。水箱的主要結構參數為:上、下水箱底面積均為186.265 cm2;上、下水箱泄水閥流量比例系數分別為0.28和0.71;調壓器輸入模擬信號3.5 V時進水流量為98.09 cm3。
由于進水首先流入上水箱,然后流入下水箱,故與上水箱相比,下水箱的響應時間存在著容積延遲[6]。手動閥具有非線性特性,使泄水流量與液位高度之間呈非線性關系,即本平臺是一個具有容積延遲的非線性系統。分析和控制這類系統,對解決實際工業控制問題有重要作用。
實驗平臺可以完成以下幾類實驗:①信號的濾波處理;②基于Matlab/Simulink的被控對象、檢測/執行元件特性測試與建模;③基于xPC的控制系統的控制器在環實時仿真。
可以實現的控制算法包括:簡單PID控制、串級控制、模糊控制、預測控制等。
2 實驗平臺的軟件開發
2.1 xPC目標配置
xPC是在Simulink/RTW軟件下,針對PC機及其兼容系統的一種成熟和完善的實時應用技術,主要任務是將Simulink/Stateflow模型與VC2013等各支持性組件鏈接并編譯生成可執行代碼。xPC目標環境的配置主要包括通信方式和啟動方式的配置。
通信方式選擇網絡通信(TCP/IP)方式。配置步驟為:在Matlab主窗口輸入xpcxplr命令,彈出xPC Target Explorer的窗口中,Communication Type選擇TCP/IP,并設置目標機網絡參數和網卡類型。
啟動方式選擇U盤啟動方式,也稱DOSLoader啟動。制作U盤啟動盤需要經歷2個步驟:
(1)將U盤制作成DOS啟動盤。通過專門的DOS盤制作軟件(如USBoot和Flash Boot)將U盤制作成DOS啟動盤,完成DOS啟動盤制作后,通過從U盤啟動的方式能將目標機啟動到DOS環境下。
(2)制作DOS載入器的目標啟動盤。在xPC目標環境設置對話框中,將TargetBoot設置為DOSLoader,選擇BootDisk選項,該選項將啟動目標機所必需的文件生成到已制作好的U盤DOS啟動盤上,生成的文件包括:引導程序BOOTSECT. RTT,命令處理程序command.com,系統文件kernel.sys(即xPC目標內核文件),以及xpctga.rta文件。其中xpctga.rta文件中包括RTW生成的目標應用程序、選擇的連接方式和xPC Target的環境相關設置。
2.2 PCI-1716板卡的設備驅動模塊庫開發
xPC環境包含有豐富的I/O設備驅動,同時也允許用戶編寫擴展的I/O設備驅動。在Matlab xPC目標工具箱提供的驅動程序庫中,支持的板卡種類有很多,但大多是一些國外的知名廠家的設備,基本不支持國內生產的板卡,尤其是PCI接口總線的板卡。此時需要為PCI-1716板卡開發驅動模塊。PCI-1716驅動模塊的開發主要包括以下步驟:
(1)用C語言編寫S-函數驅動代碼并保存為.c文件,以AD模塊為例,在Matlab的命令窗口中輸入編譯代碼指令:mex adadvantech1716.c,將驅動函數的代碼編譯為Simulink可調用的動態庫adadvantech1716.mexw64。
(2)在Simulink中創建一個Library,保存為.mdl文件,并在Library中新建S-Function Block,對新建的S-Function進行配置,在Block parameter(S-Function)中輸入驅動名稱以及驅動中設定的輸入變量的名稱。
(3)通過mask對驅動模塊進行封裝操作,主要是對驅動模塊的外觀進行設計和設置變量。將上一步輸入的變量添加進來,再按照需要設置變量值。
S-函數的驅動流程可以分為兩個階段(見圖2):第一個階段為初始化,包括屬性參數和仿真參數設置,如系統仿真時間、步長設定和系統狀態初值等;第二個階段是運行階段,該階段循環執行,包括輸出計算和狀態更新。
驅動模塊的S-函數的子函數的主要功能如下:
(1)mdlInitializeSizes函數為模塊的初始化函數,完成模塊的輸入輸出端口個數定義、設置端口個數、信號寬度、數據類型和采樣時間等參數;
(2)mdlInitializeSample Times函數主要是實現對初始采樣時間的設置,A/D與D/A模塊的初始采樣時間均設置為繼承前面模塊;
(3)mdlstart函數是用來獲取PCI-1716板卡的配置信息,并進行初始化;
(4)mdlOutputs函數在仿真過程中單步循環運行,在每個時間步調用函數計算AD或DA模塊的輸出,并在每次調用時更新時間狀態;
(5)mdlTerminate函數在停止運行時調用一次,用來結束仿真過程,實現對AO<0,1>及AI<0,1,2, 3,4,5,6,7>通道的復位操作。

圖2 驅動模塊函數代碼設計流程
2.3 基于WPF的運行監控界面的設計與開發
運行監控界面基于.Net平臺進行開發,采用WPF語言設計。為提高系統功能的可配置性與可擴展性,將整個軟件平臺分為功能獨立的模塊,可實現對單元模塊的獨立開發、編譯和測試。當各模塊邏輯功能穩定運行之后,將其進行功能重組,從而進行整個平臺的完整測試。軟件平臺功能模塊包括實驗管理模塊、通信控制模塊、啟動盤配置模塊、實驗數據監控模塊、實驗日志記錄模塊。
實驗管理模塊:創建實驗項目文件,在該項目下導入或新建算法策略,提供增、刪、改、導入和導出的功能。
通信控制模塊:編譯目標算法策略生成可執行程序并下載到控制器中,執行對運行狀態的控制等操作。采用TCP/IP通信協議,支持網絡化遠程操作。
啟動盤配置模塊:向啟動盤中配置高速實時啟動內核,配置相應的IP地址和設備端口號,以啟動控制器并創建通信條件。
實驗數據監控模塊:提供參數在線修改,以及運行趨勢的實時顯示。
實驗日志記錄模塊:將接收到的液位數據填入.m文件模板中進行保存,配合Matlab軟件對實驗趨勢曲線圖進行分析[7]。
在水箱液位控制算法調試階段,將液位控制算法下載至控制器后,系統會解析代碼、生成路徑,分別以_bio.m和_pt.m為后綴生成信號文件與參數文件,并在“信號/參數瀏覽器”窗口中生成相應的信號樹狀圖和算法參數樹狀圖。通過該窗口實現狀態信號可視化與算法在線調參,并將運行狀態變量數據集和算法參數分別存儲為Matlab腳本文件,其中狀態變量數據集用于事后實驗分析,而算法參數腳本文件用于控制算法實驗的復現。該階段信號實時數據顯示模塊會提供高精度采樣模式,即硬件控制器將在算法執行階段采集數據,每次采集到設定的采樣點數,上傳一次數據。系統通過一個定時器來實現狀態變量采集與控制器參數修改,并上傳至Matlab工作空間。為確保軟件運行流暢度,定時器每隔100 ms調用一次。
3 實驗平臺分析及實驗驗證
3.1 對象特性分析及測試
3.3.1 實驗目的
為設計出合理的液位控制算法和整定實驗參數,對該雙容水箱系統進行對象特性模型辨識。
3.3.2 實驗原理
由雙容水箱液位控制系統的物料平衡方程建立水箱液位與控制量之間的關系,得到液位控制的傳遞函數,并根據階躍響應時雙容水箱的自平衡過程對其參數進行辨識[8]。由物料平衡方程得
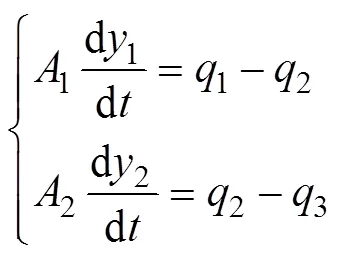


進行拉氏變換后得到

由于實際水箱液位系統中存在純滯后環節并整理成以下傳遞函數的標準形式:

3.1.3 實驗步驟

圖3 雙容水箱階躍響應曲線
根據文獻[9]簡述,由階躍響應法整理得到的雙容水箱液位傳遞函數標準形式為

3.2 水箱液位控制PI實驗
(1)實驗目的。模擬工業過程控制,實現對雙容水箱的液位控制,將水箱實際液位維持在給定高度;同時幫助實驗操作人員理解PI控制器的工作原理。
(2)實驗原理簡述。比例控制加快系統響應速度,積分控制消除系統穩態誤差。PI控制器通過結合比例、積分控制的特點,使得系統液位控制滿足快速性和準確性。PI控制器參數常用的整定方法有臨界比例度法、Ziegler-Nichols整定法等。由于實際的非線性系統與辨識得到的線性模型有差異,整定出的參數往往需要根據實際的響應曲線進行優化。
(3)實驗步驟。對水箱液位進行PI控制策略的原型設計,整定PI控制器的參數,配合基于WPF的運行監測界面實時監測、在線調參,得到控制效果最優的參數p=500,i=0.5。實時仿真策略如圖4所示。
實驗結果如圖5的水箱液位趨勢圖所示。首先給定初始液位為3 cm,一段時間后水箱實際液位達到3 cm并保持穩定。在140 s左右,改變給定值為5 cm,一段時間后仍能達到給定值并保持穩定。
3.3 單容水箱液位LQI控制實驗
3.3.1 實驗目的
通過實驗,使學生掌握線性二次型加積分(LQI)控制原理和設計方法,并基于本實驗平臺進行實際控制實驗,對實驗結果進行觀察和分析,直觀地感受LQI控制器各個參數的控制作用。
3.3.2 實驗原理
使水箱的液位高度跟蹤液位設定值。尋找一個最優控制律*(),使得系統的實際輸出()盡量接近所期望的軌線r(),而又不消耗過多的控制能量。為消除外部擾動致使系統產生的穩態誤差,將積分器串入誤差后面,構造出狀態反饋加積分器矯正的輸出反饋系統[10]。控制系統結構如圖6所示。
對于線性定常系統


圖5 雙容水箱PI控制實驗液位趨勢圖

圖6 線性二次型加積分控制系統結構圖
將誤差后面串入的積分器生成的x作為附加狀態,與原被控系統構成增廣動態方程[11],如式(8)所示。

得到增廣系統的狀態反饋控制律為

將式(9)代入式(8),可得到狀態反饋增廣系統的動態方程為:
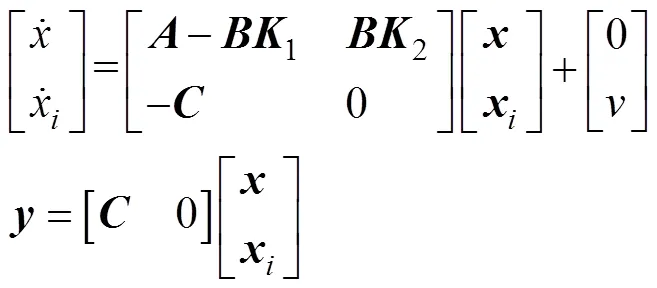
,,分別為,,維列向量;為維列向量;,,分別為×,×,×實數矩陣;1,2分別為×,×維實數矩陣。加權矩陣、都為正定常數矩陣,性能指標函數為:

3.3.3 實驗教學實踐
單容水箱液位系統的狀態方程為

將上水箱液位誤差后面串入的積分器生成的附加狀態1引入,得到增廣的系統方程為:

先將和簡單取為對角線全為1的實對稱矩陣,單容水箱的ZQR控制實驗實時仿真策略如圖7所示。
實際應用中,通常將值固定,然后改變的數值。在本實驗平臺中,最優控制參數的確定是經過實際比較后得到的。取=[0.95],此參數下,液位初始給定值為2.5 cm,175 s后改變為3 cm。上水箱液位的實時狀態趨勢曲線圖8所示。

圖7 單容水箱LQI控制實驗仿真

圖8 LQR控制實驗液位趨勢圖
4 結語
本文使用快速原型控制思想,搭建了基于快速原型控制器的過程控制實驗平臺,支持自動代碼生成、參數在線調整和趨勢實時顯示,支持網絡化遠程操作,實驗的算法設計、參數整定與結果觀測幾乎同時進行。基于本實驗平臺,實現了單、雙容水箱的模型辨識及PI控制、單容水箱的LQI的狀態反饋控制,驗證了平臺的可用性以及算法設計的快速性。本實驗平臺使學生對于過程控制系統有了更深的認知,提高了實驗控制算法的設計和驗證的效率。對于過程控制教學研究及解決復雜工程能力的培養有重要意義。
[1] 何瀟,王子棟,劉洋,等.基于Internet的網絡化三容水箱實驗平臺[J].南京航空航天大學學報,2011, 43(增刊1): 190–193.
[2] 湯偉,竇晨超,馮曉會.基于西門子S7-300 PLC的過程控制實驗平臺設計[J].實驗室研究與探索,2018,37(4):49–52,58.
[3] 高興泉,王子碩,祝強,等.基于Quanser數據采集卡的雙容水箱控制系統半實物仿真平臺[J].吉林化工學院學報,2018, 35(7): 14–17,89.
[4] 姜英妹,張井崗.基于dSPACE的水箱液位控制系統[J].太原科技大學學報,2010, 31(4): 289–292.
[5] 費慶,李保奎,王曉平,等.基于Simulink/xPC的過程控制綜合實驗平臺改造[J].實驗技術與管理,2011, 28(11): 286–289.
[6] 雷振伍,吳秀冰,孫德輝,等.基于PCS7和Simulink的過程控制虛擬仿真實驗平臺開發[J].實驗技術與管理,2016, 33(1): 135–139.
[7] 齊玉成.遠程控制理論實驗室專用控制器的研究與開發[D].沈陽:東北大學,2009.
[8] 章鉛飛.復雜過程控制系統設計及控制策略的研究[D].南京:南京理工大學,2012.
[9] 胡姣.雙容水箱系統的辨識與滑模變結構控制[D].西安:西安理工大學,2017.
[10] 拓守恒,鄧方安,雍龍泉.改進教與學優化算法的LQR控制器優化設計[J].智能系統學報,2014, 9(5): 602–607.
[11] WANCHANA S, BENJANARASUTH T, ISARAKORN D, et al. Phase-locked loop process control system using LQR approach. [C]//Control, Automation, Robotics & Vision Conference, Icarcv. IEEE, 2004.
[12] 王永翔.基于狀態反饋的四容水箱過程控制系統設計[D].北京: 北方工業大學,2017.
Process control experimental platform based on rapid prototyping controller
DAI Wei, ZHANG Zhengxuan, XIA Zhenxing, CHANG Junlin
(School of Information and Control Engineering, China University of Mining and Technology, Xuzhou 221116, China)
Taking dual-tank as controlled object, a rapid prototyping controller based process control experimental platform is developed by adopting the rapid control prototype technology and combining the real-time simulation environment provided by RTW (Real Time Workshop)/xPC Target toolbox with the operation monitoring software based on WPF (Windows Presentation Foundation). This platform supports the automatic code generation and on-line parameter adjustment, improves the efficiency of control algorithm design and verification, and has a good effect on deepening students’ understanding and mastering process control system and improving their ability to solve complex engineering problems.
rapid control prototype technology; process control; dual-tank
TP23
A
1002-4956(2019)11-0121-07
10.16791/j.cnki.sjg.2019.11.030
2019-05-20
國家自然科學基金項目(61603393);中國礦業大學研究生教育教學改革研究與實踐項目(YJSJG-2018-035)
代偉(1984—),男,河南安陽,博士,副教授,主要研究方向為智能與數據驅動的復雜工業過程建模、運行優化控制理論的研究。E-mail: weidai@cumt.edu.cn
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55