后懸架系統(tǒng)試驗(yàn)載荷分析與驗(yàn)證研究
2019-11-26 07:17:46王長(zhǎng)明王仕偉李云鵬
汽車技術(shù) 2019年11期
王長(zhǎng)明 王仕偉 李云鵬
(中國(guó)第一汽車股份有限公司研發(fā)總院,汽車振動(dòng)噪聲與安全控制綜合技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)春 130011)
1 前言
目前,乘用車懸架系統(tǒng)及其零部件的強(qiáng)度評(píng)價(jià)方法主要有試驗(yàn)驗(yàn)證和虛擬試驗(yàn)驗(yàn)證兩種,試驗(yàn)驗(yàn)證分為懸架系統(tǒng)級(jí)試驗(yàn)和零部件級(jí)試驗(yàn)。對(duì)此,王新偉、劉再生和范璐等[1-3]對(duì)乘用車懸架系統(tǒng)的耐久試驗(yàn)就其原理、試驗(yàn)方法和優(yōu)缺點(diǎn)等方面進(jìn)行了分析與研究。系統(tǒng)級(jí)試驗(yàn)可綜合考查懸架系統(tǒng)在整車大部分工況下的使用強(qiáng)度,其試驗(yàn)結(jié)果對(duì)車型開發(fā)更具指導(dǎo)意義,缺點(diǎn)是試驗(yàn)成本高、周期長(zhǎng);零部件級(jí)試驗(yàn)則無法考慮懸架系統(tǒng)中各零部件的強(qiáng)度匹配關(guān)系,易導(dǎo)致結(jié)構(gòu)失效未發(fā)生在易更換的零部件,產(chǎn)生極高的維修成本,優(yōu)點(diǎn)是易搭建、低成本和短周期等。本文以某C 級(jí)轎車多連桿后懸架系統(tǒng)和臺(tái)架試驗(yàn)系統(tǒng)為研究對(duì)象,在ADAMS/CAR中建立該車后懸架系統(tǒng)多體動(dòng)力學(xué)模型和虛擬臺(tái)架模型,采用軟件型虛擬試驗(yàn)技術(shù)中的半解析法[4-5]進(jìn)行后懸架系統(tǒng)虛擬靜強(qiáng)度和耐久試驗(yàn)載荷分析,并與臺(tái)架試驗(yàn)結(jié)果進(jìn)行對(duì)比,驗(yàn)證該虛擬試驗(yàn)?zāi)P偷姆治鼍取?/p>
2 臺(tái)架試驗(yàn)
懸架系統(tǒng)臺(tái)架試驗(yàn)主要有靜強(qiáng)度和耐久試驗(yàn)兩種,表1所示為較常見的試驗(yàn)項(xiàng)目。其中,懸架系統(tǒng)靜強(qiáng)度試驗(yàn)為準(zhǔn)靜態(tài)的單軸加載試驗(yàn),懸架系統(tǒng)耐久試驗(yàn)為動(dòng)態(tài)單軸或多軸加載試驗(yàn)。

表1 懸架系統(tǒng)臺(tái)架試驗(yàn)項(xiàng)目
2.1 靜強(qiáng)度試驗(yàn)
圖1 所示為某C 級(jí)轎車多連桿后懸架系統(tǒng)垂向和縱向靜強(qiáng)度試驗(yàn)裝置。將螺旋彈簧和后副車架總成按照設(shè)計(jì)硬點(diǎn)與替代車身的剛性支架進(jìn)行固定,用銷軸將固定盤和輪轂鎖死,防止加載中制動(dòng)盤轉(zhuǎn)動(dòng)。減振器采用實(shí)車結(jié)構(gòu),通過龍門梁調(diào)整加載車輪的中心位置。加載點(diǎn)在車輪中心,并分別按照垂向目標(biāo)載荷18.6 kN 和縱向目標(biāo)載荷24.7 kN進(jìn)行分級(jí)加載。
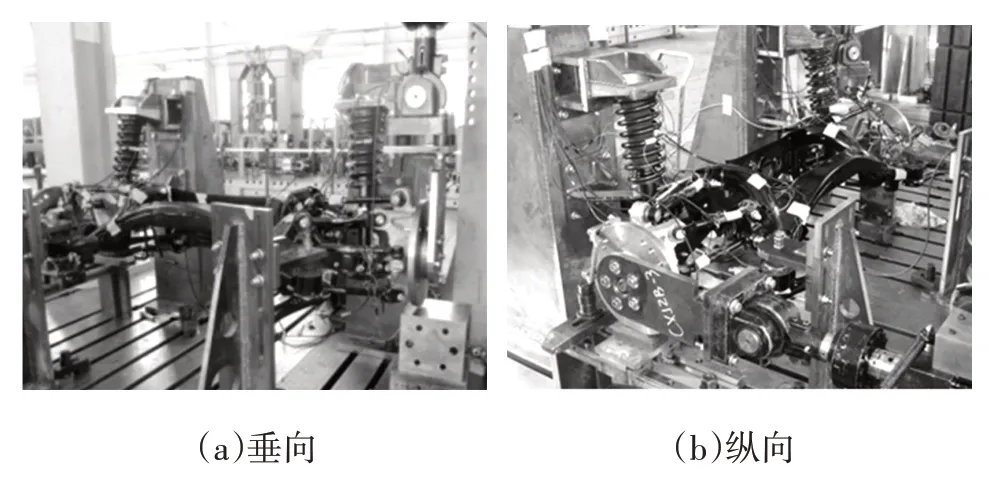
圖1 后懸架系統(tǒng)靜強(qiáng)度試驗(yàn)裝置
2.2 耐久試驗(yàn)
圖2 所示為某C 級(jí)轎車多連桿后懸架系統(tǒng)實(shí)物耐久加載臺(tái)架試驗(yàn)裝置,試驗(yàn)總體固定和約束方式與圖1基本相同,主要區(qū)別在于耐久試驗(yàn)的減振器可采用剛性桿替代或采用實(shí)車結(jié)構(gòu)。加載點(diǎn)在車輪中心,分別開展后懸架系統(tǒng)8通道和12通道動(dòng)態(tài)載荷譜激勵(lì)疲勞試驗(yàn)。
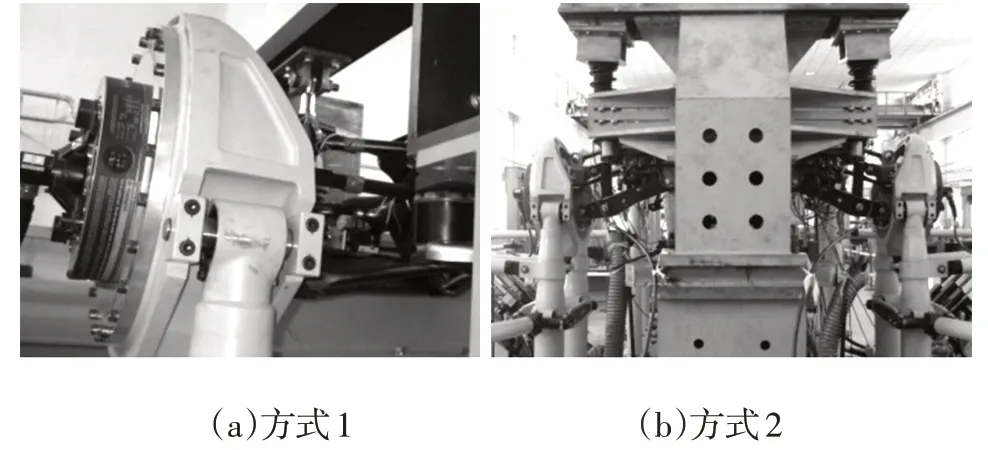
圖2 后懸架系統(tǒng)耐久臺(tái)架試驗(yàn)裝置
2.3 臺(tái)架試驗(yàn)載荷測(cè)試
對(duì)試驗(yàn)對(duì)象開展臺(tái)架試驗(yàn)的方案設(shè)計(jì)、測(cè)點(diǎn)布置和數(shù)據(jù)采集等工作。其中,臺(tái)架試驗(yàn)除采集表2中的測(cè)試項(xiàng)目外,還需采集作動(dòng)器的力與位移信號(hào)和兩側(cè)輪心六分力信號(hào),用于后續(xù)的載荷分析與驗(yàn)證。

表2 臺(tái)架試驗(yàn)4個(gè)控制臂測(cè)試項(xiàng)目
二力桿件測(cè)試應(yīng)變/力主要采用臺(tái)架試驗(yàn)標(biāo)定和理論計(jì)算2種方法,此處僅對(duì)標(biāo)準(zhǔn)二力桿件理論計(jì)算原理進(jìn)行說明:

式中,ε為應(yīng)變;σ為應(yīng)力;E為彈性模量;F為軸向力;A為橫截面積;D為桿件直徑。
3 虛擬試驗(yàn)
虛擬試驗(yàn)分析的目的是在虛擬試驗(yàn)環(huán)境下,借助交互式技術(shù)和試驗(yàn)分析技術(shù),在汽車設(shè)計(jì)階段即可對(duì)產(chǎn)品的性能進(jìn)行評(píng)價(jià)或者驗(yàn)證。
載荷分析使用的虛擬試驗(yàn)分析建模流程為:后懸架系統(tǒng)多體動(dòng)力學(xué)模型建立;虛擬臺(tái)架多體動(dòng)力學(xué)模型建立;多體動(dòng)力學(xué)模型子系統(tǒng)總裝和調(diào)校;載荷分解與提取。
3.1 分析模型
3.1.1 后懸架系統(tǒng)
懸架系統(tǒng)設(shè)計(jì)數(shù)據(jù)包括硬點(diǎn)、彈性元件(含襯套、彈簧和減振器)參數(shù)、質(zhì)量和幾何運(yùn)動(dòng)關(guān)系等,其中彈性元件參數(shù)均來源于試驗(yàn)數(shù)據(jù),將上述數(shù)據(jù)輸入模型,得到后懸架緩沖塊的實(shí)測(cè)剛度特性和副車架前點(diǎn)襯套的實(shí)測(cè)徑向剛度特性分別如圖3 和圖4 所示。在ADAMS/CAR中建立后懸架系統(tǒng)動(dòng)力學(xué)模型,如圖5所示。
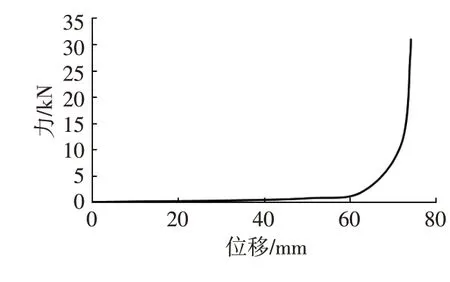
圖3 后懸架緩沖塊的實(shí)測(cè)剛度特性
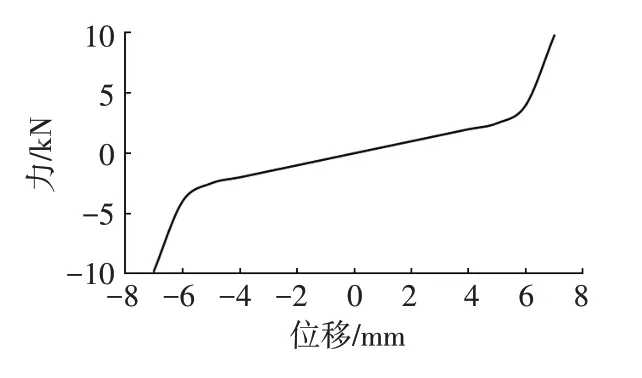
圖4 副車架前點(diǎn)襯套的實(shí)測(cè)徑向剛度特性

圖5 后懸架系統(tǒng)多體動(dòng)力學(xué)模型
3.1.2 虛擬臺(tái)架
作動(dòng)器加載模型和臺(tái)架邊界約束是虛擬臺(tái)架[6-8]系統(tǒng)建模的關(guān)鍵,其中作動(dòng)器加載模型構(gòu)建包括垂向、縱向和多軸加載3種模型。
作動(dòng)器可簡(jiǎn)化為1 個(gè)圓柱副(Cylindrical Joint)和1個(gè)作用力制動(dòng)器,制動(dòng)器的加載條件來自于實(shí)際臺(tái)架試驗(yàn)的作動(dòng)器加載力,圖6所示為后懸架總成縱向靜強(qiáng)度試驗(yàn)的作動(dòng)器加載力。實(shí)際臺(tái)架約束方式的有效體現(xiàn)是載荷正確傳遞的重要保障,建模時(shí)將圖1a、圖1b中實(shí)際臺(tái)架約束方式分別簡(jiǎn)化為平面副(Planer Joint)和移動(dòng)副(Translational Joint)。
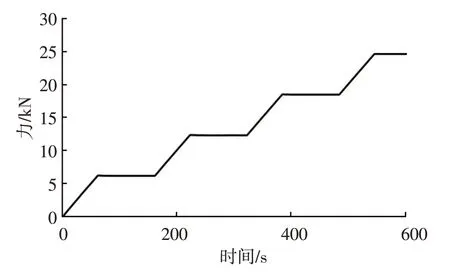
圖6 后懸架總成縱向靜強(qiáng)度試驗(yàn)的作動(dòng)器加載力
3.2 模型總裝與調(diào)校
將建立的后懸架系統(tǒng)和虛擬臺(tái)架多體動(dòng)力學(xué)模型在ADAMS/CAR中進(jìn)行子系統(tǒng)組裝,如圖7所示。
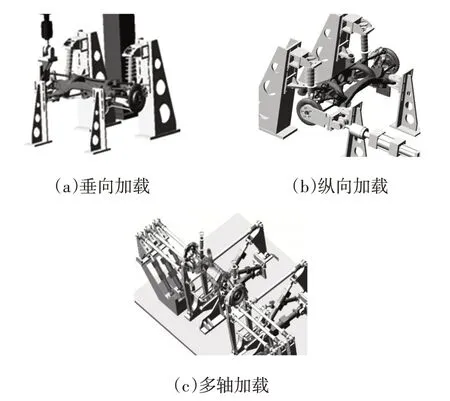
圖7 后懸架總成虛擬臺(tái)架模型
為了保證載荷分析的準(zhǔn)確性,必須對(duì)總裝后的模型進(jìn)行調(diào)校,保證虛擬試驗(yàn)分析模型與實(shí)際臺(tái)架試驗(yàn)狀態(tài)一致,以提升模型精度和載荷分解質(zhì)量。模型組裝和調(diào)校應(yīng)主要考慮以下內(nèi)容:
a.后懸架系統(tǒng)和虛擬臺(tái)架模型通訊器匹配測(cè)試;
b.模型參數(shù)修正,以臺(tái)架實(shí)際測(cè)量的緩沖塊間隙測(cè)試值對(duì)模型進(jìn)行修正;
c.K&C調(diào)校,保證后懸架模型的K特性和C特性與實(shí)車K&C試驗(yàn)結(jié)果一致;
d.靜平衡調(diào)校,保證虛擬試驗(yàn)分析姿態(tài)與實(shí)際臺(tái)架試驗(yàn)姿態(tài)一致,同時(shí)對(duì)各響應(yīng)通道信號(hào)清零以保證和實(shí)際臺(tái)架信號(hào)采集初始狀態(tài)一致。
3.3 載荷分解與提取
根據(jù)建立的懸架系統(tǒng)多體動(dòng)力學(xué)模型和虛擬臺(tái)架模型,進(jìn)行后懸架系統(tǒng)靜強(qiáng)度與耐久臺(tái)架試驗(yàn)等虛擬試驗(yàn)載荷分解,完成后提取左側(cè)4個(gè)控制臂的軸向應(yīng)變和載荷計(jì)算信號(hào),得到用于后續(xù)試驗(yàn)驗(yàn)證的對(duì)比分析數(shù)據(jù)。
4 對(duì)比驗(yàn)證
以后懸架系統(tǒng)的垂向和縱向靜強(qiáng)度臺(tái)架試驗(yàn)和耐久臺(tái)架試驗(yàn)方式1 為例進(jìn)行臺(tái)架試驗(yàn)與虛擬試驗(yàn)的對(duì)比分析。
靜強(qiáng)度試驗(yàn)主要從系統(tǒng)剛度和載荷分析特性進(jìn)行虛擬試驗(yàn)?zāi)P蛯?duì)比分析,耐久試驗(yàn)主要從系統(tǒng)試驗(yàn)隨機(jī)輸入和響應(yīng)信號(hào)的時(shí)域、頻域和系統(tǒng)傳遞特性等方面進(jìn)行對(duì)比分析。
4.1 靜強(qiáng)度試驗(yàn)
圖8 所示為臺(tái)架試驗(yàn)和虛擬試驗(yàn)的后懸架系統(tǒng)垂向和縱向剛度特性,表3 所示為臺(tái)架試驗(yàn)和虛擬試驗(yàn)4個(gè)控制臂軸向極限載荷。由圖8和表3可知,臺(tái)架試驗(yàn)和虛擬試驗(yàn)系統(tǒng)剛度和控制臂應(yīng)變對(duì)比結(jié)果一致性較好,說明虛擬試驗(yàn)?zāi)P蛣偠群洼d荷分配與實(shí)際的后懸架系統(tǒng)試驗(yàn)一致性較好。
驗(yàn)證結(jié)果表明:后懸架系統(tǒng)靜強(qiáng)度虛擬試驗(yàn)分析可有效再現(xiàn)實(shí)際的后懸架系統(tǒng)線性段剛度和載荷分配關(guān)系,除試驗(yàn)過程中損壞的測(cè)點(diǎn)2外,其余3個(gè)測(cè)點(diǎn)的極限載荷誤差范圍為-2.63%~8.8%。
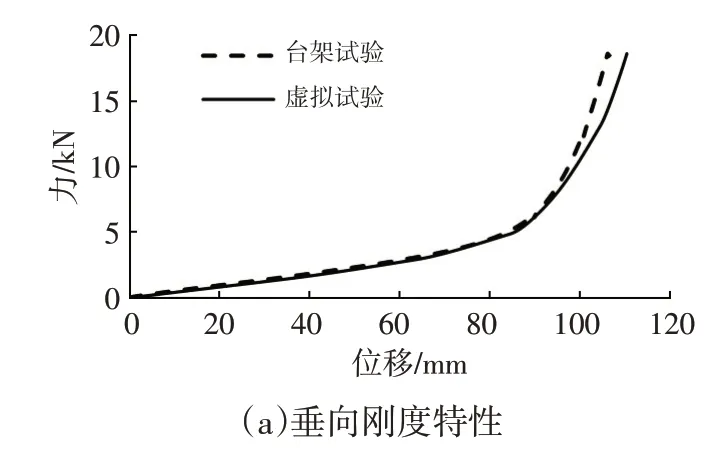
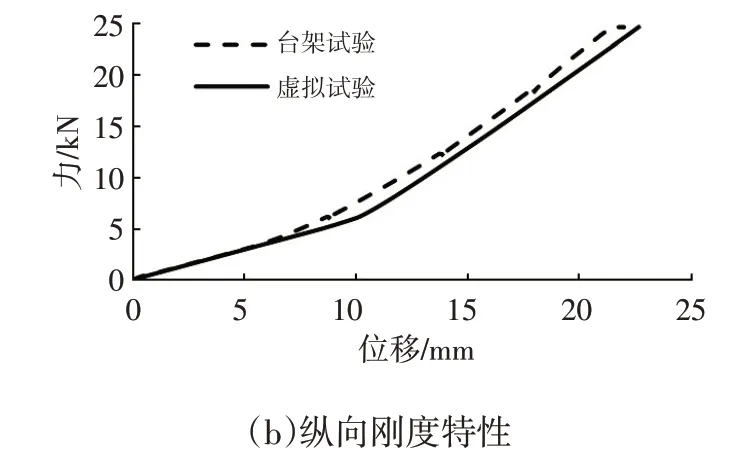
圖8 臺(tái)架試驗(yàn)和虛擬試驗(yàn)的后懸架系統(tǒng)剛度特性

表3 臺(tái)架試驗(yàn)和虛擬試驗(yàn)4個(gè)控制臂軸向極限載荷對(duì)比
4.2 耐久試驗(yàn)
4.2.1 時(shí)域?qū)Ρ?/p>
圖9所示為臺(tái)架試驗(yàn)和虛擬試驗(yàn)測(cè)點(diǎn)1軸向應(yīng)變的時(shí)間歷程信號(hào),表4所示為臺(tái)架試驗(yàn)和虛擬試驗(yàn)4個(gè)測(cè)點(diǎn)軸向載荷的統(tǒng)計(jì)量對(duì)比。由圖9和表4可知,臺(tái)架試驗(yàn)與虛擬臺(tái)架試驗(yàn)各測(cè)點(diǎn)軸向載荷統(tǒng)計(jì)量一致性較好,說明虛擬試驗(yàn)分析可較好地再現(xiàn)后懸架系統(tǒng)試驗(yàn)動(dòng)態(tài)時(shí)域響應(yīng)特性。
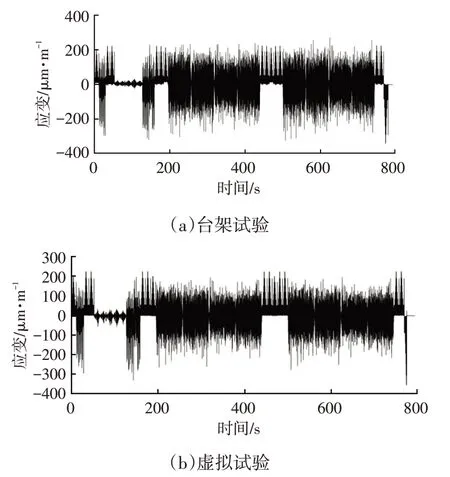
圖9 臺(tái)架試驗(yàn)和虛擬試驗(yàn)測(cè)點(diǎn)1軸向應(yīng)變的時(shí)間歷程信號(hào)
驗(yàn)證結(jié)果表明:后懸架系統(tǒng)耐久試驗(yàn)虛擬試驗(yàn)分析可有效再現(xiàn)實(shí)際后懸架系統(tǒng)軸載荷統(tǒng)計(jì)量,軸向載荷幅值最小值誤差均在5%以內(nèi),軸向載荷幅值最大值誤差除測(cè)點(diǎn)1和測(cè)點(diǎn)2外均在3%以內(nèi),軸向載荷幅值標(biāo)準(zhǔn)差誤差除測(cè)點(diǎn)1外均在5.20%以內(nèi)。
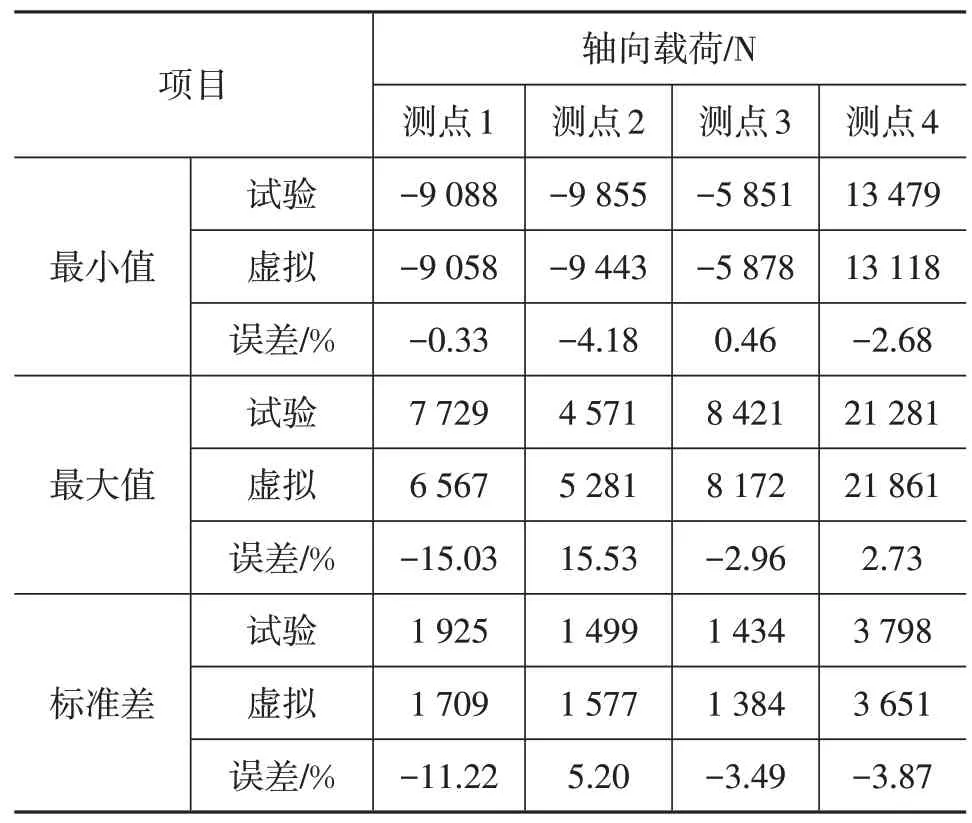
表4 臺(tái)架試驗(yàn)和虛擬試驗(yàn)4個(gè)測(cè)點(diǎn)軸向載荷的統(tǒng)計(jì)量對(duì)比
4.2.2 頻域?qū)Ρ?/p>
圖10和表5所示分別為0~40 Hz范圍內(nèi)臺(tái)架試驗(yàn)和虛擬臺(tái)架試驗(yàn)測(cè)點(diǎn)1軸向應(yīng)變的功率譜密度曲線和4個(gè)測(cè)點(diǎn)軸向應(yīng)變的標(biāo)準(zhǔn)差對(duì)比,圖11所示為臺(tái)架試驗(yàn)和虛擬臺(tái)架試驗(yàn)4 個(gè)測(cè)點(diǎn)軸向應(yīng)變的相對(duì)損傷對(duì)比。由圖10、圖11 和表5 可知,臺(tái)架試驗(yàn)與虛擬臺(tái)架試驗(yàn)各測(cè)點(diǎn)軸向應(yīng)變的頻域特性和相對(duì)損傷一致性較好,說明虛擬試驗(yàn)分析可較好地再現(xiàn)實(shí)際后懸架系統(tǒng)頻域響應(yīng)特性。
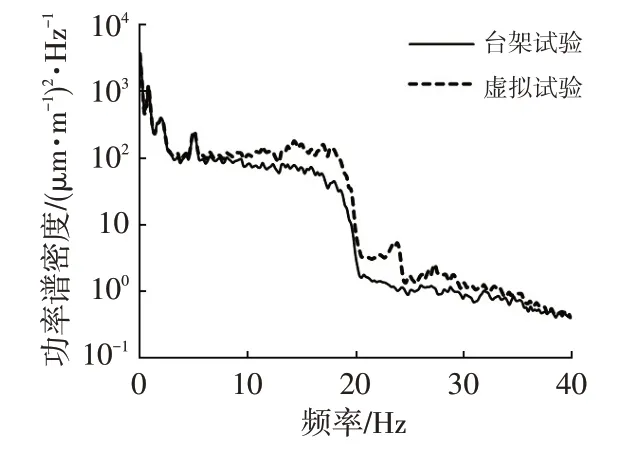
圖10 臺(tái)架試驗(yàn)和虛擬試驗(yàn)測(cè)點(diǎn)1應(yīng)變的功率譜密度曲線

表5 臺(tái)架試驗(yàn)和虛擬試驗(yàn)4個(gè)測(cè)點(diǎn)應(yīng)變的標(biāo)準(zhǔn)差對(duì)比
驗(yàn)證結(jié)果表明:軸向應(yīng)變?cè)?~40 Hz 范圍內(nèi)4 個(gè)測(cè)點(diǎn)的標(biāo)準(zhǔn)差誤差范圍為-9.43%~2.88%,軸向應(yīng)變的相對(duì)損傷除測(cè)點(diǎn)1 外均在0.60~1.22 范圍內(nèi),后懸架系統(tǒng)耐久試驗(yàn)虛擬試驗(yàn)分析可有效再現(xiàn)實(shí)際后懸架系統(tǒng)軸向應(yīng)變頻域特性和相對(duì)損傷。
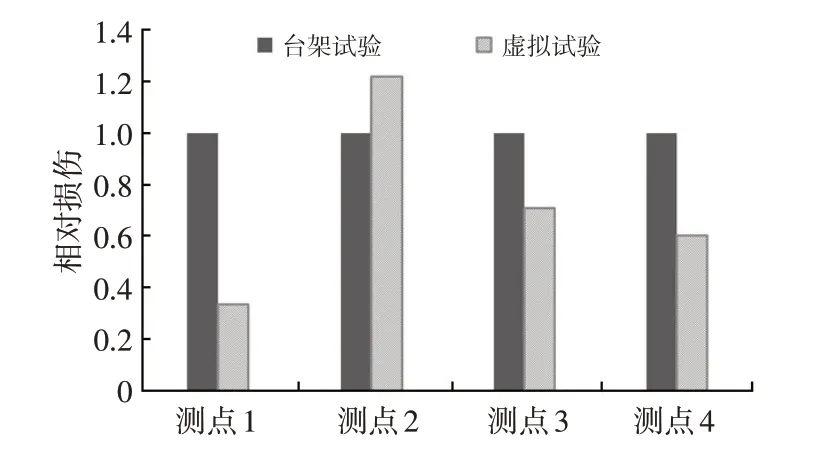
圖11 臺(tái)架試驗(yàn)和虛擬試驗(yàn)4個(gè)測(cè)點(diǎn)軸向應(yīng)變的相對(duì)損傷對(duì)比
4.2.3 系統(tǒng)傳遞特性對(duì)比
圖12和圖13分別為0~40 Hz范圍內(nèi)臺(tái)架試驗(yàn)和虛擬臺(tái)架試驗(yàn)輪心垂向力對(duì)測(cè)點(diǎn)1 軸向應(yīng)變的系統(tǒng)傳遞特性和各向輪心力對(duì)各軸向應(yīng)變載荷傳遞特性的標(biāo)準(zhǔn)差。由圖12和圖13可知,臺(tái)架試驗(yàn)與虛擬臺(tái)架試驗(yàn)各向輪心力對(duì)各軸向應(yīng)變的系統(tǒng)傳遞特性曲線及其標(biāo)準(zhǔn)差一致性較好,說明虛擬試驗(yàn)?zāi)P椭械南到y(tǒng)傳遞特性與實(shí)際后懸架系統(tǒng)試驗(yàn)一致。
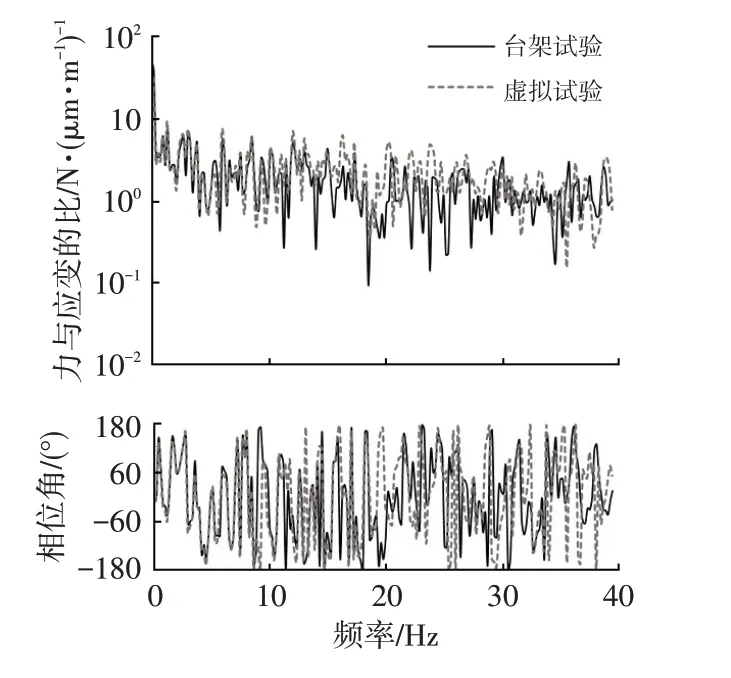
圖12 輪心垂向力對(duì)測(cè)點(diǎn)1軸向應(yīng)變的系統(tǒng)傳遞特性曲線
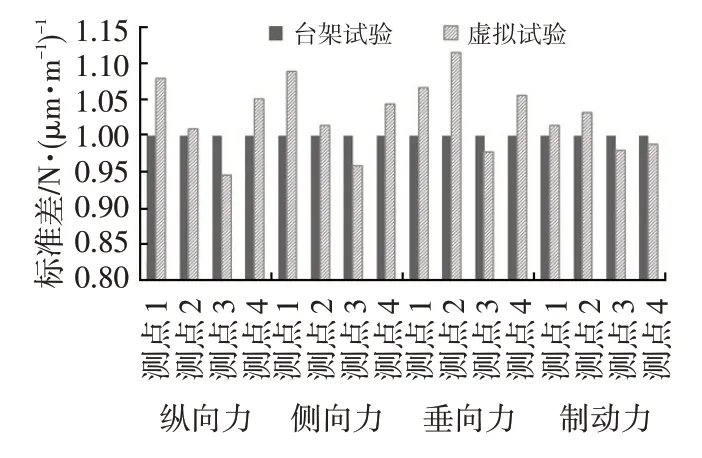
圖13 各向輪心力對(duì)各軸向應(yīng)變的系統(tǒng)傳遞特性標(biāo)準(zhǔn)差對(duì)比
驗(yàn)證結(jié)果表明:后懸架系統(tǒng)耐久試驗(yàn)虛擬試驗(yàn)分析可較好再現(xiàn)實(shí)際的0~20 Hz 內(nèi)的系統(tǒng)傳遞特性,20~40 Hz 的系統(tǒng)傳遞特性稍差,各向輪心力對(duì)各軸向應(yīng)變的系統(tǒng)傳遞特性在0~40 Hz 范圍內(nèi)的標(biāo)準(zhǔn)差誤差為-5.53%~11.46%。
綜上所述,基于后懸架系統(tǒng)虛擬試驗(yàn)分析可有效再現(xiàn)實(shí)際后懸架系統(tǒng)剛度、載荷分配關(guān)系,以及隨機(jī)激勵(lì)下的響應(yīng)信號(hào)時(shí)域、頻域和系統(tǒng)傳遞特性,但仍需不斷積累和完善虛擬試驗(yàn)分析方法才能得到較為可靠的系統(tǒng)級(jí)試驗(yàn)載荷,為懸架系統(tǒng)級(jí)及其零部件的剛度、強(qiáng)度和疲勞壽命分析[9-11]及其結(jié)構(gòu)優(yōu)化提供有效的載荷邊界條件。
此外,對(duì)比驗(yàn)證結(jié)果表明虛擬試驗(yàn)分析精度還存在一定的誤差,引起誤差的主要原因?yàn)樘摂M試驗(yàn)分析無法模擬后懸架系統(tǒng)安裝配合間隙、結(jié)構(gòu)件局部形變,虛擬試驗(yàn)?zāi)P蜑槎鄤傮w簡(jiǎn)化等。
5 結(jié)束語
本文以多連桿后懸架系統(tǒng)臺(tái)架試驗(yàn)的測(cè)試載荷為分析目標(biāo),對(duì)其虛擬試驗(yàn)分析模型的建模、調(diào)校和載荷提取等方面展開論述,并重點(diǎn)對(duì)兩種載荷數(shù)據(jù)進(jìn)行較為充分對(duì)比驗(yàn)證。結(jié)果表明:虛擬試驗(yàn)分析可以較好地再現(xiàn)實(shí)際的后懸架系統(tǒng)線性段剛度和載荷分配關(guān)系,以及懸架系統(tǒng)臺(tái)架試驗(yàn)響應(yīng)信號(hào)的時(shí)域、頻域和系統(tǒng)傳遞特性,說明該虛擬試驗(yàn)分析模型可為懸架系統(tǒng)及其零部件的剛度、強(qiáng)度和疲勞壽命分析及其結(jié)構(gòu)優(yōu)化提供有效的載荷邊界條件。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
