直流工程逆變站過零點測量故障改進方案
2019-11-23 08:01:42楊克虎楊壽源張瓊王明江
云南電力技術 2019年5期
楊克虎,楊壽源,張瓊,王明江
(云南電網有限責任公司楚雄供電局,云南 楚雄 675000)
0 前言
某直流工程短期內連續兩次因過零點測量故障導致直流系統ESOF。本文通過分析故障,提出了一個有效的改進方案并進行實驗驗證,該方案的實施解決了因測量系統電流過零點故障導致的直流閉鎖事故。方案也可為其他直流工程提供借鑒參考。
1 故障描述
本文以雙極運行過程中極1ESOF 故障分析為例。該直流工程雙極500 WM 功率送電期間逆變站出現極1ESOF。具體工作站SER 報文記錄如圖1。
由上述SER 事件可知,極1 系統1 的電流過零信號故障導致了本系統軟件故障并發生主從系統切換。在極1 系統2 切換為主系統200 ms 后也產生電流過零信號故障從而導致極1 系統2 軟件故障。最終由于極1 兩套系統均不OK 啟動極控切換邏輯跳閘。
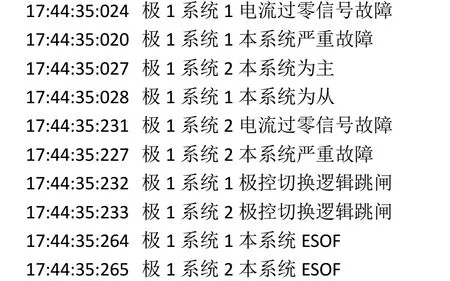
圖1 極1ESOF時工作站SER記錄
2 故障初步分析
極1ESOF 時刻故障錄波如下所示:
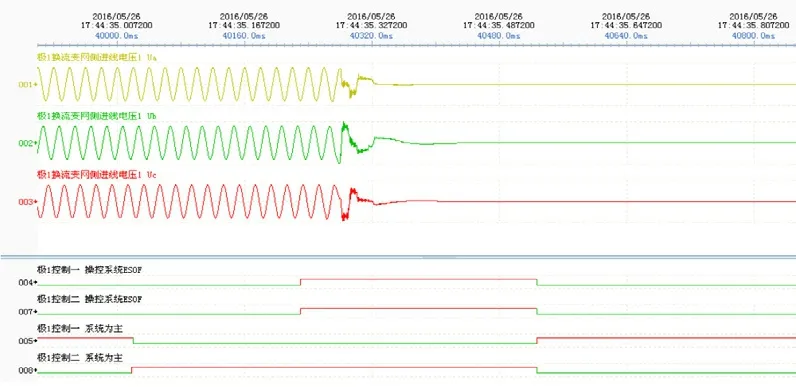
圖2-1 極1ESOF時外置故障錄波波形
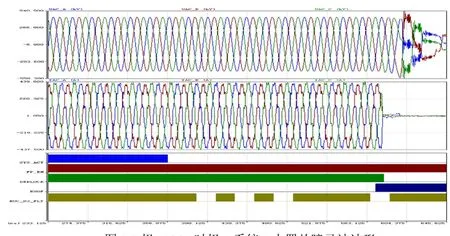
圖2-2 極1ESOF時極1系統1內置故障錄波波形
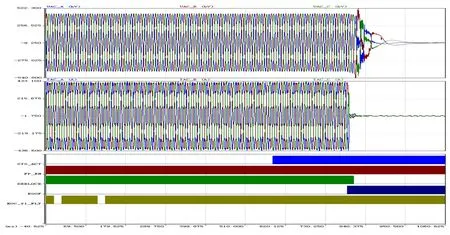
圖2-3 極1ESOF時極1系統2內置故障錄波波形
由圖2-1 可知,極控ESOF 之前交流進線三相電壓正常無畸變;由圖2-2 可知,在極1 系統1 為主系統且未發生系統切換之前EOC_D3_FLT(D3 橋臂電流過零故障脈寬)最長持續脈寬為250 ms,極控程序判斷逆變站主系統發生電流過零故障脈寬超過200 ms 時判定本系統軟件故障(整流站電流過零故障持續30 s 判斷極控軟件故障,逆變站極控主系統電流過零故障持續200 ms、從系統電流過零故障持續30 s 時判定極控軟件故障),因此極1 系統1 軟件不OK 導致系統切換。由圖2-3 可知極1 系統2 切換為主系統到本系統ESOF 產生出現了EOC_Y1_FLT 最長持續脈寬為210 ms,此時極1 系統2 判定軟件故障,從而極1 兩套系統均故障導致極控切換邏輯跳閘ESOF 產生。
3 故障定位
由于電流過零信號故障判據為某一閥片的電壓過零信號先于電流過零信號產生,由錄波文件可知極1ESOF 之前交流電壓未發生畸變。為進一步確定問題原因,將極控ESP 板卡接收來自 VBE 的12 路電流過零信號和極控程序自身判斷的12 路電壓過零信號引入極控內置故障錄波進行監測,同時將任意一路電流過零故障產生作為觸發極控內置故障錄波的條件。
4 故障錄波分析
極控電流過零故障觸發的內置故障錄波如下所示:
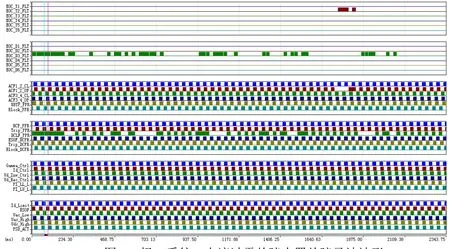
圖4 極1系統2電流過零故障內置故障錄波波形
圖4 錄波文件中,狀態量由上到下EOC_Y1_FLT~EOC_D6_FLT 為12 路 電 流 過 零 故 障信 號;ACF1_2_CL~BLOCK_DCPR 為12 路電 壓 過 零 信 號(Y1-Y6,D1-D6);Gamma_Ctrl~PSD_ACT 為12 路電流過零信號(Y1-Y6,D1-D6);由波形可知,在Y2、D3 發生電流過零故障期間,對應的電流過零信號脈沖正常而電壓過零信號則出現了不同程度的畸變,故判定是由于Y2、D3 閥片的電壓過零信號產生錯誤引起對應閥片的電流過零故障。
5 故障錄波驗證
極控連續報電流過零故障期間,通過示波器錄制電壓波形,通過測試設備模擬現場故障。
故障模擬方案:通過RTDS 裝置在同步電壓的過零點附近疊加幅值約80 mv,周期20-30μs 的諧波信號,持續時間為1 ms。具體如圖5-1 所示。此時檢測設備檢測到的電壓過零信號如圖5-2 中黃色波形所示。
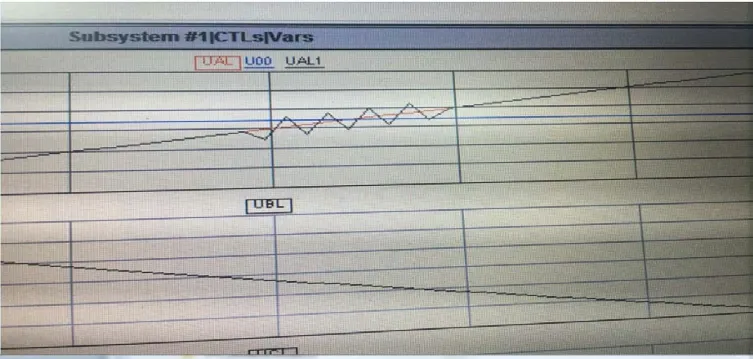
圖5-1 同步電壓疊加干擾信號波形
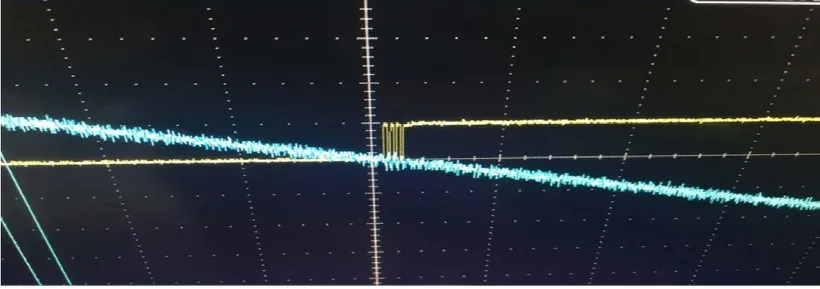
圖5-2 硬件檢測到的電壓過零信號
由圖5-2 可見,由于疊加了諧波信號,硬件電路在電壓過零點附近可以檢測到多個過零脈沖,該脈沖是用于熄弧角檢測的一個判據,如果該脈沖在同一個周波多次出現,控制系統必然會發出電流過零故障的事件。針對上述現象,我們在軟件中增加了軟件濾波,濾波前后波形對比如圖5-3 所示。
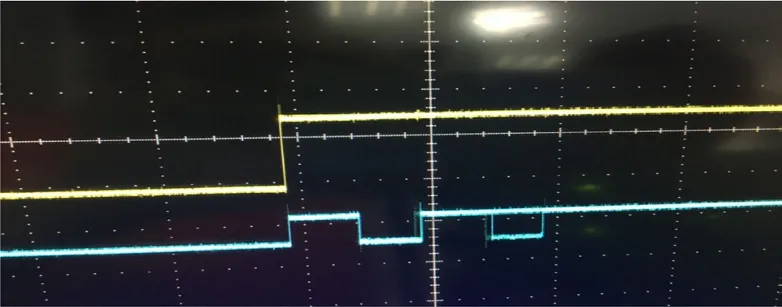
圖5-3 濾波前后波形對比
通過示波器對比濾波前后的波形,其中藍色波形表示疊加了諧波的電壓過零信號,可見有多個脈沖,黃色波形為經過軟件濾波后輸出的波形,正是這個波形將用于后續的熄弧角測量。經過濾波后的電壓過零信號實測波形仍然為10 ms 有效寬度,可見該方法不會造成電壓過零信號延時,因此不會影響熄弧角測量精度。
6 程序改進處理
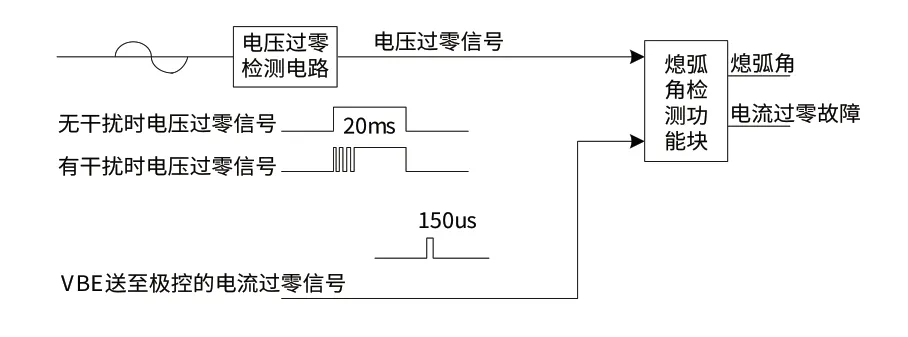
圖6-1 電壓過零檢測邏輯改進前邏輯框圖
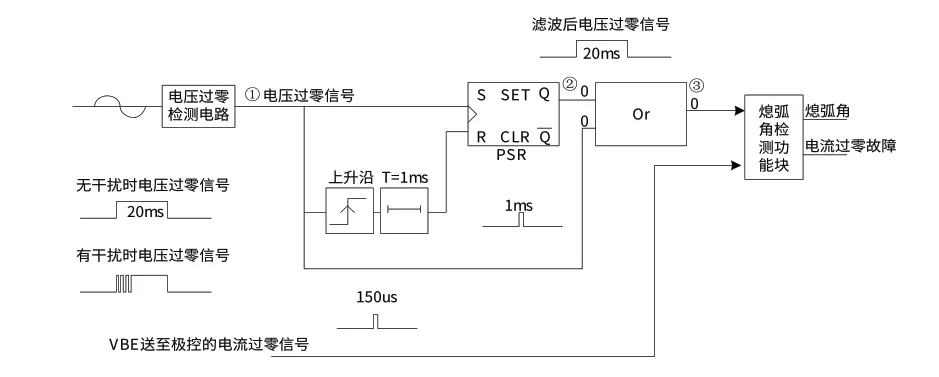
圖6-2 電壓過零檢測邏輯改進后邏輯框圖
為了能有效濾除諧波,且更大程度保證熄弧角測量的準確性,我們通過增加軟件濾波的方式來解決問題。實施方案如圖6-2 所示。每個周波內當檢測到類似①波形所示電壓過零信號(無論是正常的電壓過零或是收到干擾的包含多個脈沖的過零信號)時,系統啟動一次RS觸發器,同時啟動一個1 ms 的計數器,在1 ms時間范圍內,RS 觸發器的輸出始終為有效高電平,直到計數器截止復位RS 觸發器,此時觸發器輸出一個類似②波形的脈沖。該脈沖與檢測到的①原始電壓過零信號進行邏輯或操作之后產生一個沒有任何干擾的類似③波形的信號,該信號用于熄弧角的測量。該功能的主要作用就是可以有效濾除電壓過零點附件的多個干擾脈沖,使其只能輸出一個有效脈沖,且相對于真實信號沒有延時,可以保證熄弧角的測量精度。
7 極控程序改進處理
為了方便檢測電壓過零,電流過零,Y/Y,Y/Δ 相位差等信息,特在極控程序中將12 路電壓過零信號和12 路電流過零信號引入極控裝置內置故障錄波(采樣周期0.625 ms),極控程序改進方案如下:
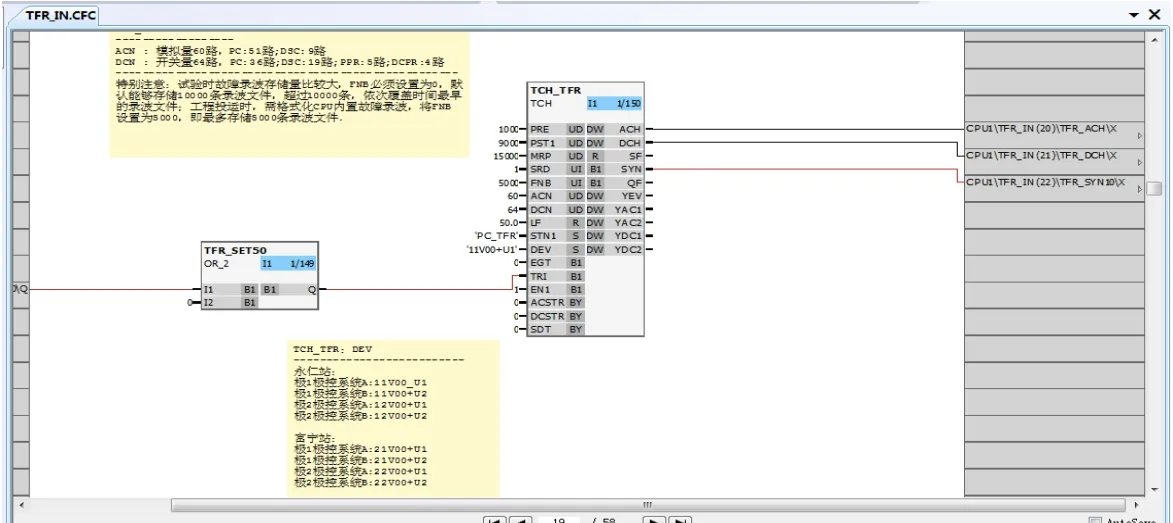
圖7-1 極控程序改進前
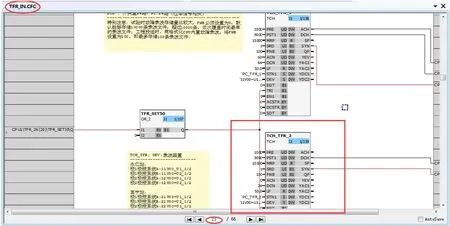
圖7-2 極控程序改進后
8 驗證試驗
在極控處理器板卡中對程序進行改進后,我們還進行了以下幾項驗證試驗,故障錄波文件中U1 至U6 為星星變換流器六路電流過零信號,U7 至U12 為星角變換流器六路電流過零信號;I1 至I6 為星星變換流器六路電壓過零信號,I7 至I12 為星角變換流器六路電壓過零信號。
8.1 升功率過程中分接頭動作熄弧角變化
三相同步電壓,換流變閥側電流波形,電壓過零,電流過零等信號如下圖。

圖8-1 升功率過程波形——電壓電流
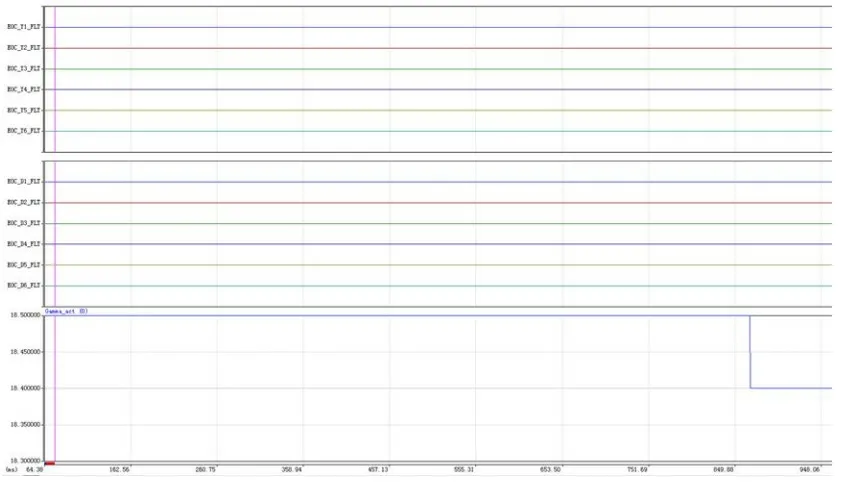
圖8-2 升功率過程波形——12路EOC故障信號及熄弧角
上圖第一欄為Y 橋六個電流過零故障信號,第二欄為D 橋六個電流過零故障信號,最后一欄是熄弧角,約在18 度。
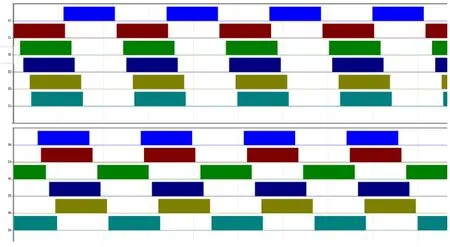
圖8-3 升功率過程波形——電壓過零及電流過零信號
上圖為Y 橋六個閥的電壓過零和電流過零共12 個信號,實際計算熄弧角時利用的是信號的翻轉時刻,故無需在意信號是高電平還是低電平。試驗過程中,電壓過零及電流過零信號都可以正確檢測到。電流過零故障信息一直為0,沒有故障發生。圖中U1-U6 為Y 側6 路電流過零信號,正常情況下每周波可以檢測到一個150μs 的脈沖,為了有效記錄波形,將該波形的每一個上升沿作為一個錄波波形的翻轉時刻,錄波圖中每個脈沖的上升沿及下降沿都代表一個有效的電流過零信號。正常情況下脈沖寬度20ms,占空比50%。如果脈沖超過20 ms,則認為有丟失脈沖的情況。
I1-I6 為Y 側6 路電壓過零信號,正常情況下每周波可以檢測到一個10 ms 脈沖,為了有效記錄波形,將該波形的每一個上升沿作為一個錄波波形的翻轉時刻,錄波圖中每個脈沖的上升沿及下降沿都代表一個有效的電壓過零信號。正常情況下錄波脈沖寬度20 ms,占空比50%。如果脈沖超過20 ms,則認為有丟失脈沖的情況。
如圖8-3 所示,系統運行正常。
8.2 逆變站單相接地故障1500 MW試驗項目
試驗波形
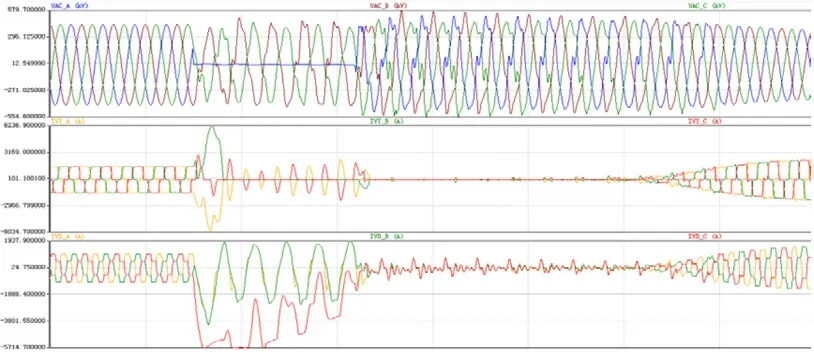
圖8-4 單相接地故障波形——電壓電流
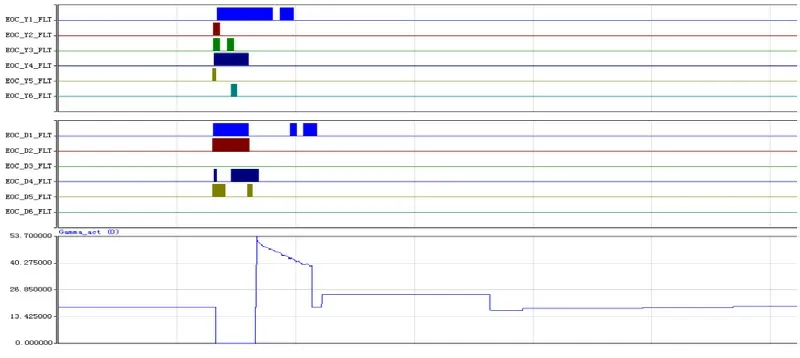
圖8-5 單相接地故障波形——12 路 EOC 故障信號及熄弧角
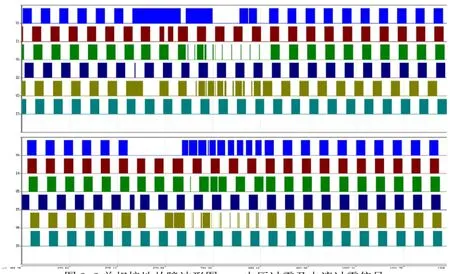
圖8-6 單相接地故障波形——電壓過零及電流過零信號
如圖,在1500 MW 工況下,啟動單相接地故障,故障時熄弧角測量功能可以正確響應。
8.3 脈沖丟失故障
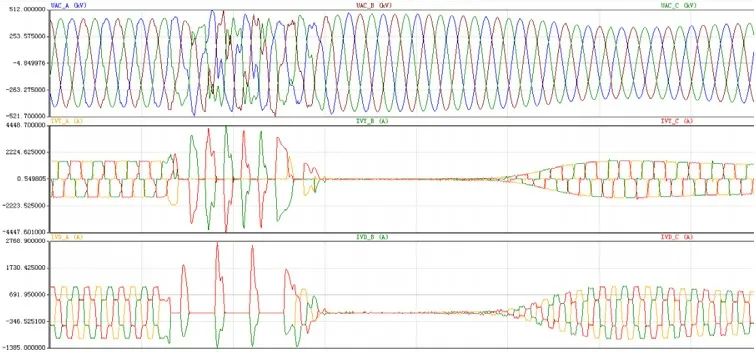
圖8-7 脈沖丟失波形-電壓電流

圖8-8 脈沖丟失波形-12 路EOC故障信號及熄弧角
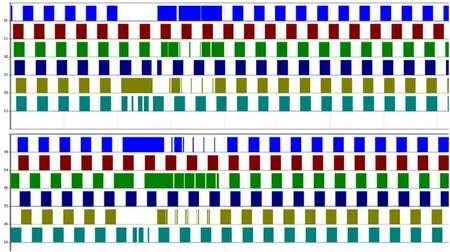
圖8-9 脈沖丟失波形——電壓過零及電流過零信號
如圖為單相脈沖丟失80 ms 后的波形,此期間電流過零和電壓過零故障能正確檢測到,熄弧角測量及控制均作出了正確的響應。
9 驗證結論
經過故障模擬找到了故障原因,針對原有電壓過零信號添加了濾波環節,不僅有效的消除了電壓過零信號的抖動,且對電壓過零信號沒有延遲,保證了熄弧角的計算精度。經過正常情況下的升降功率過程及非正常情況下的交流單相接地試驗及脈沖丟失試驗,證明了該方案能保證熄弧角的正確計算,能有效解決直流工程中電流過零測量受同步電壓過零點附近干擾而報故障的問題。后續工程運行中未再出現過電流過零故障也實際驗證了該方案的有效性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
