變負(fù)載流量調(diào)節(jié)閥電液伺服作動系統(tǒng)研究
2019-11-22 07:08:34朱美印裴希同但志宏
燃?xì)鉁u輪試驗與研究 2019年5期
關(guān)鍵詞:調(diào)節(jié)閥模型
姜 震,王 曦,朱美印,裴希同,張 松,但志宏
(1.北京航空航天大學(xué)能源與動力工程學(xué)院,北京 100191;2.先進航空發(fā)動機協(xié)同創(chuàng)新中心,北京 100191;3.航空發(fā)動機高空模擬技術(shù)重點實驗室,四川綿陽 621000)
1 引言
高空模擬試驗臺(簡稱高空臺)能在地面上模擬發(fā)動機空中工作環(huán)境條件,是先進航空發(fā)動機研發(fā)過程中必不可少的關(guān)鍵設(shè)備[1-3],其進氣調(diào)節(jié)裝置一般由各種流量調(diào)節(jié)閥組成。在環(huán)境模擬試驗中,寬廣的飛行包線和起動到推力最大的狀態(tài)變化,會導(dǎo)致流量調(diào)節(jié)閥上的氣動負(fù)載變化極為巨大,其進口氣體壓力的變化范圍和變化率分別可達(dá)到0~379 kPa 和12 kPa/s[4]。流量調(diào)節(jié)閥的伺服作動性能直接影響寬廣飛行包線范圍內(nèi)發(fā)動機高空飛行環(huán)境的模擬效果,在工程中一般采用電液伺服控制系統(tǒng)對其精確調(diào)節(jié)來實現(xiàn)。
對于電液伺服控制系統(tǒng)的負(fù)載國內(nèi)外均開展了相關(guān)研究。如Mili?等[5]考慮了負(fù)載的彈力與阻尼力對電液伺服系統(tǒng)的影響,并在此基礎(chǔ)上開展了位置魯棒控制研究;王春行[6]在負(fù)載為彈力與阻尼力情況下研究了電液伺服系統(tǒng)的動態(tài)特性;鄭曉華等[7]在電液伺服搖板式造波機控制系統(tǒng)中,將造波負(fù)載力考慮為慣性負(fù)載和粘性負(fù)載進行處理;付永領(lǐng)等[8]針對電液伺服位置控制系統(tǒng)壓力脈動問題,建立了包括負(fù)載重力、摩擦力及彈簧力的負(fù)載力數(shù)學(xué)模型,仿真分析了負(fù)載力變化對系統(tǒng)的影響。但均缺少對流量調(diào)節(jié)閥氣動變負(fù)載問題更一般的適用性的研究。
為此,本文通過分析流量調(diào)節(jié)閥動力特性,提出一種建立變負(fù)載電液作動機構(gòu)模型的建模方法。建立開環(huán)變負(fù)載模型,并在同等條件下與試驗數(shù)據(jù)進行對比分析以驗證該方法的有效性,設(shè)計閉環(huán)回路并對閉環(huán)變負(fù)載電液伺服控制系統(tǒng)的跟蹤性能和抗干擾性能進行仿真驗證。
2 變負(fù)載動力學(xué)問題
某高空臺特種流量調(diào)節(jié)閥(圖1)[9-10]在整體上分為前殼體、中間殼體、后殼體三部分。前殼體上裝有二級、四級、八級固定閥瓣,中間殼體為固定圓盤,后殼體上裝有角度可調(diào)的無級盤。傳動機構(gòu)中液壓作動筒活塞桿作直線運動,并推動由連桿連接的無級盤作圓弧運動,其幾何運動關(guān)系如圖2 所示。當(dāng)進行發(fā)動機高空性能模擬試驗時,飛行高度和飛行馬赫數(shù)確定對無級盤角度的調(diào)節(jié)指令,流量調(diào)節(jié)閥前后的氣流壓力隨之變化,從而使作用在無級盤上的氣動負(fù)載改變。
調(diào)節(jié)過程中,無級盤與中間殼體的相對運動將產(chǎn)生變摩擦力矩Mf。設(shè)無級盤單位面積上的氣動壓力為fg,取如圖2 所示的面積微元,則單位面積微元上的摩擦力為:

式中:μ為無級盤與殼體間的摩擦系數(shù)。
計算該摩擦力對盤心的力矩微元并積分可得:

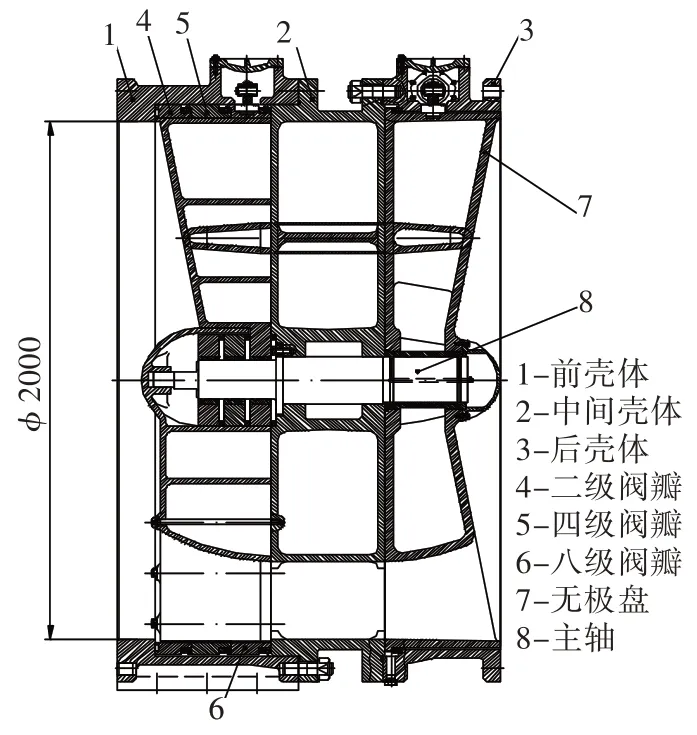
圖1 特種流量調(diào)節(jié)閥結(jié)構(gòu)示意圖Fig.1 Special flow regulating valve structure
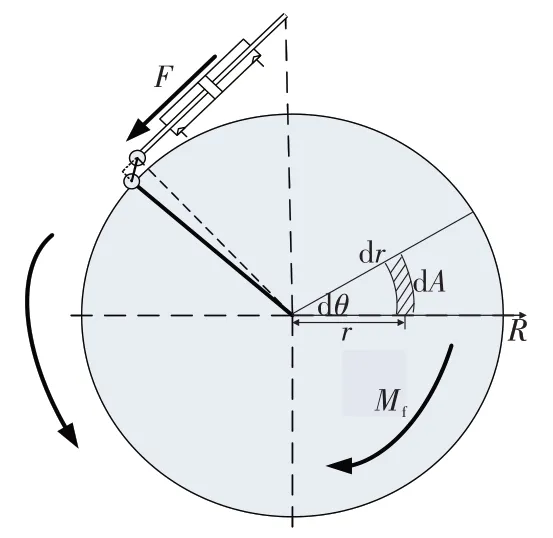
圖2 作動筒推動無級盤運動示意圖Fig.2 Actuator pushes the motion of the valve plate
定義變氣動負(fù)載力為Fg,則

由圖3 中間殼體與無級盤的相對位置關(guān)系可確定Fg。記無級盤后氣體壓力為p2、作用面積為S,無級盤上受來流氣動壓力為p1、作用面積為S1,則

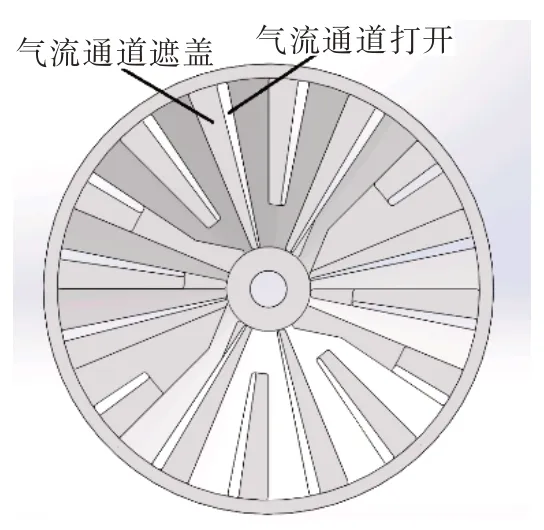
圖3 無級盤與殼體的相對位置示意圖Fig.3 The relative position of the plate and middle shell
活塞桿與無級盤間連桿長度很小,活塞桿作動力F可近似為沿圓周切向直接作用在無級盤上,則

式中:J=0.5mR2,為無級盤轉(zhuǎn)動慣量;m為無級盤質(zhì)量;,為無級盤角加速度;x為活塞桿位移。變換可得:

上式表明,將無級盤與活塞桿視為等效運動體,其等效質(zhì)量為M=0.5m,變氣動載荷的等效負(fù)載力FL為。則變氣動負(fù)載與活塞桿作動力的動力學(xué)方程如式(8)所示,其動力學(xué)關(guān)系如圖4 所示。

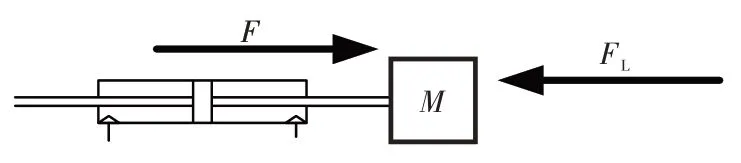
圖4 變氣動負(fù)載與活塞桿作動力的動力學(xué)關(guān)系Fig.4 Dynamical relationship between variable aerodynamic loads and piston rod force
3 變負(fù)載電液作動機構(gòu)模型
電液作動機構(gòu)包括電液伺服閥、液壓作動筒及負(fù)載。下面首先考慮電液伺服閥的建模問題。電液伺服閥模型主要由流量特性和壓力特性表示。AMESim 一般采用三位四通液壓閥元件表示電液伺服閥,其接口參數(shù)主要由額定電流、額定壓力、額定流量、自然頻率和流通面積組成。前四項可根據(jù)電液伺服閥設(shè)計計算結(jié)果確定,而流通面積需要由空載流量特性來確定。其空載流量特性如圖5 所示。
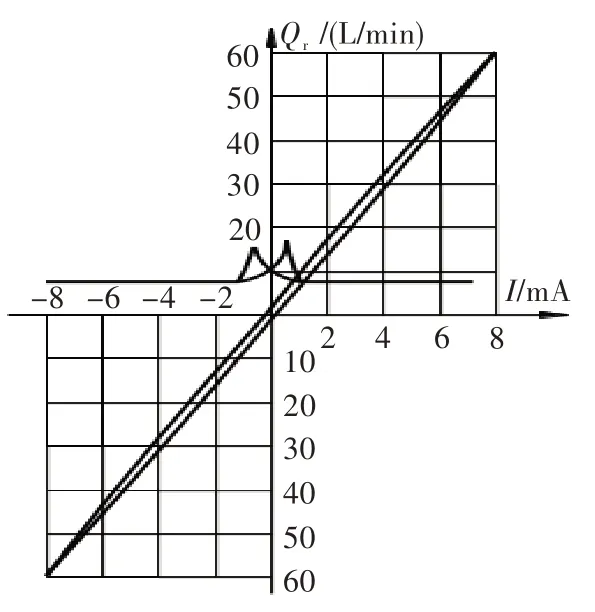
圖5 電液伺服閥空載流量特性Fig.5 Electro-hydraulic servo valve no-load flow characteristics
建立空載流量模型以確定面積修正量,圖6 為修正前后的空載流量特性曲線。修正前模型默認(rèn)的流通面積導(dǎo)致其流量偏小,乘以修正系數(shù)1.403 得到修正后流量,符合空載流量特性。
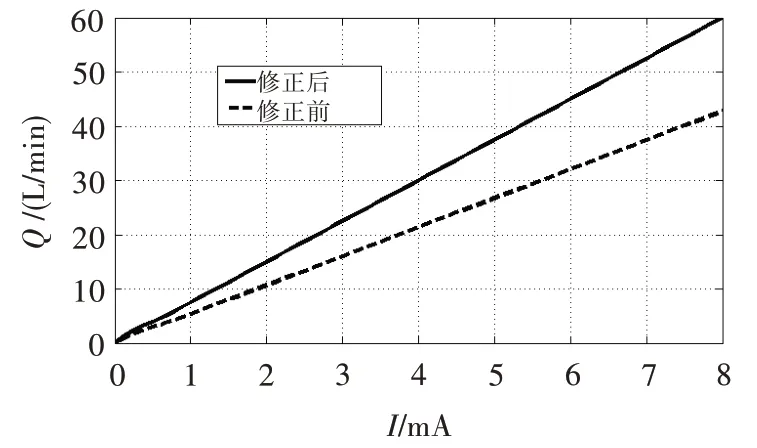
圖6 修正前后空載流量特性曲線Fig.6 No-load flow characteristic curve before and after modification
根據(jù)液壓作動筒額定負(fù)載的設(shè)計要求,確定液壓作動筒內(nèi)徑和活塞桿徑,同時給出額定負(fù)載、額定供油壓力下電液伺服閥的壓力特性曲線(圖7)。
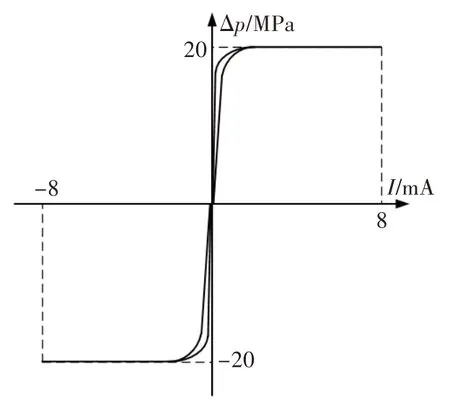
圖7 電液伺服閥壓力特性Fig.7 Pressure characteristics of electro-hydraulic servo valve
根據(jù)以上額定條件建立的電液作動機構(gòu)模型如圖8 所示,其負(fù)載壓差與電液伺服閥電流的壓力增益特性仿真曲線如圖9 所示。對比圖5、圖6 和圖7、圖9 可知,電液伺服閥模型[11-12]流量特性、壓力特性吻合度較高,所建電液伺服閥模型較為準(zhǔn)確。
其次根據(jù)變負(fù)載作動機構(gòu)動力學(xué)分析式(8)考慮變負(fù)載模型。當(dāng)活塞桿位移為0 時,氣流通道全關(guān),此時S1=1.21 m2;當(dāng)活塞桿達(dá)到最大位移0.22 m時,氣流通道全開,對應(yīng)S1=0。可得作動桿在任意位置x時
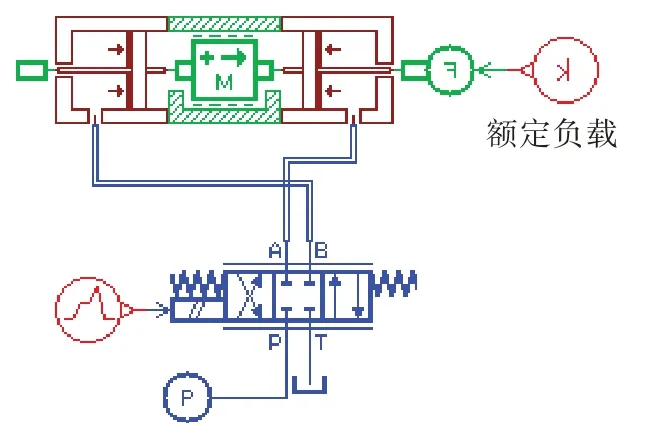
圖8 額定條件下電液作動機構(gòu)AMESim 模型Fig.8 AMESim model of electro-hydraulic actuation mechanism under rated condition
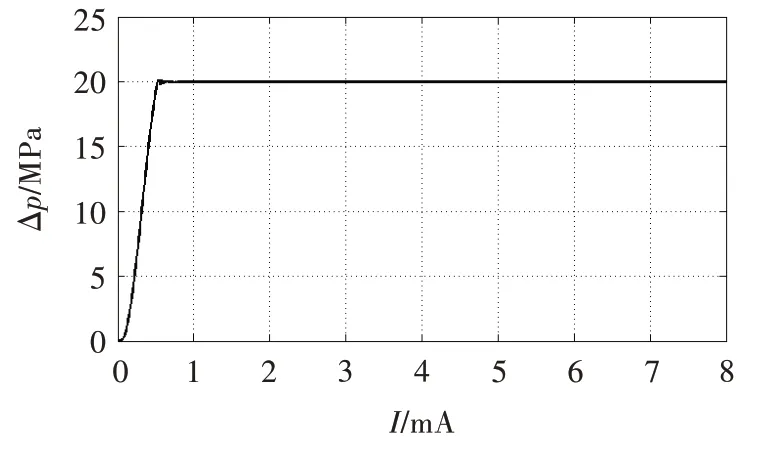
圖9 額定負(fù)載下模型壓力增益特性曲線Fig.9 Model pressure gain curve under rated load

由式(7)得到等效變負(fù)載力,考慮無級盤與中間殼體存在間隙,引入修正因子k對氣動摩擦力矩進行修正,建立變負(fù)載液壓作動筒模型(圖10)。
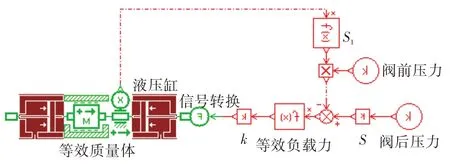
圖10 變負(fù)載液壓作動機構(gòu)AMESim 模型Fig.10 Variable load hydraulic actuator AMESim model
考慮液壓泵站結(jié)構(gòu)及上述方法,建立開環(huán)變負(fù)載電液作動機構(gòu)非線性AMESim 模型(圖11)。
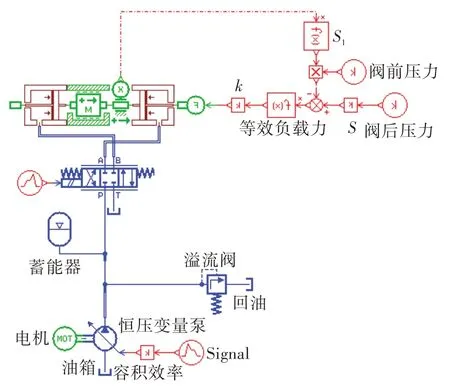
圖11 變負(fù)載電液作動機構(gòu)非線性AMESim 模型Fig.11 Nonlinear AMESim model of electro-hydraulic actuator with variable load
4 變負(fù)載電液作動機構(gòu)輸入輸出特性
在實際供油壓力pS下,考慮負(fù)載壓降pL時的負(fù)載流量[13]為:

式中:QN為電液伺服閥額定流量。
電液伺服閥動態(tài)特性[14-15]可用二階振蕩環(huán)節(jié)表示為:
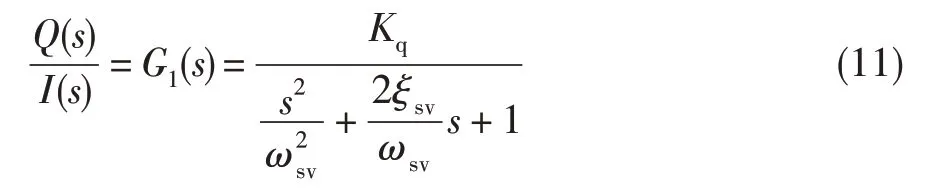
式中:Kq為流量增益,ωsv為電液伺服閥固有頻率,ξsv為電液伺服閥阻尼比。則帶負(fù)載情況下,電液伺服閥隨負(fù)載變化的流量增益為:

根據(jù)質(zhì)量守恒,液壓油單位時間內(nèi)進入液壓作動筒腔內(nèi)的流量等于該腔體積的增加,經(jīng)拉普拉斯變換可得:

式中:A為活塞有效作用面積。因此變負(fù)載電液作動機構(gòu)輸入輸出特性可用傳遞函數(shù)表示:

由于活塞桿作動力為活塞兩端壓差作用的結(jié)果(F=pLA),則

5 系統(tǒng)仿真
5.1 開環(huán)條件下模型準(zhǔn)確度對比驗證
為驗證模型的準(zhǔn)確度,在高空臺流量調(diào)節(jié)閥物理試驗臺上開展了相關(guān)試驗。設(shè)置試驗條件為:液壓作動筒初始位置0.015 m,電液伺服閥控制電流信號為10 mA。對液壓作動機構(gòu)模型進行仿真,其位移輸出響應(yīng)與試驗數(shù)據(jù)對比如圖12 所示(圖中試驗曲線出現(xiàn)小臺階變化是由于數(shù)據(jù)采集系統(tǒng)的采樣周期為0.1 s),最大相對誤差不大于1.78%;等效氣動負(fù)載變化仿真曲線如圖13 所示。
5.2 閉環(huán)條件下變負(fù)載電液作動伺服系統(tǒng)性能仿真驗證
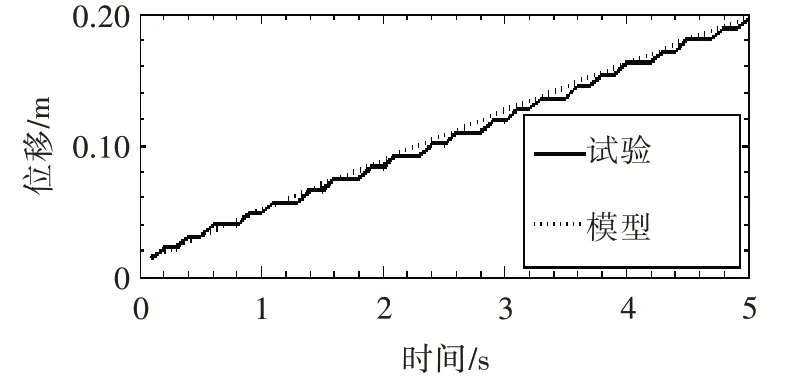
圖12 變負(fù)載下模型位移響應(yīng)與試驗數(shù)據(jù)對比曲線Fig.12 Comparison of model displacement response and experimental data under variable load
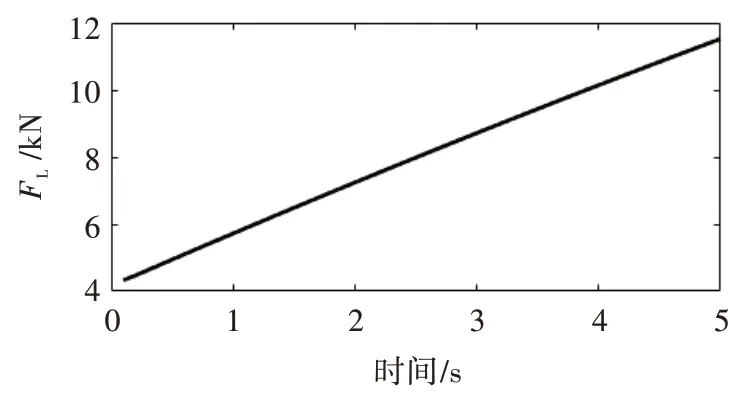
圖13 等效氣動負(fù)載變化曲線Fig.13 Equivalent pneumatic load change curve
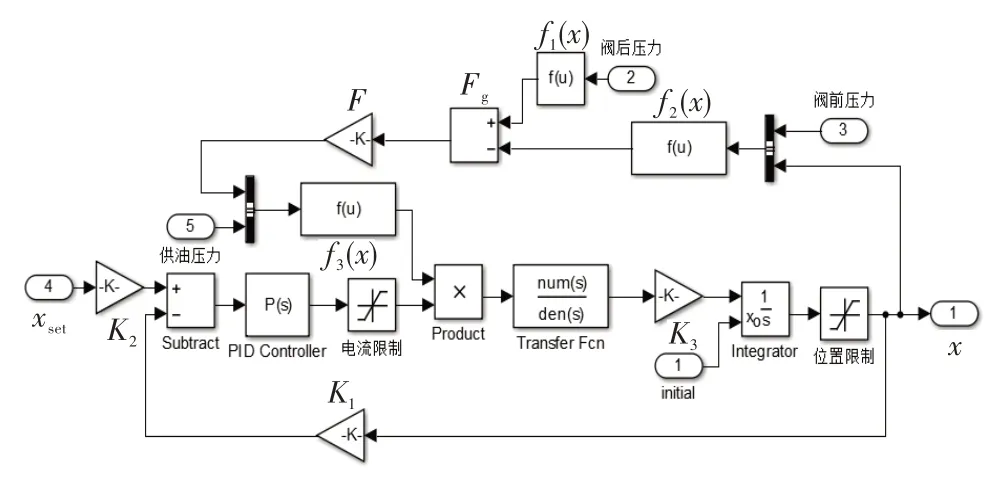
圖14 閉環(huán)電液作動伺服系統(tǒng)Fig.14 Closed-loop electro-hydraulic servo system
根據(jù)式(15)變負(fù)載電液作動機構(gòu)輸入輸出特性構(gòu)建閉環(huán)伺服控制系統(tǒng),如圖14 所示。圖中,K1及K2為位移信號轉(zhuǎn)化為電流信號的單位轉(zhuǎn)換系數(shù)。由于電液作動機構(gòu)本身具有積分環(huán)節(jié)的作用,因此采用了文獻(xiàn)[16-18]的標(biāo)準(zhǔn)結(jié)構(gòu)方案,即控制器采用純比例環(huán)節(jié),并采用基于仿真結(jié)果數(shù)據(jù)對比的優(yōu)化設(shè)計方法,設(shè)計的純比例增益Kp=47.51。另外,考慮到電液伺服閥控制電流限幅及作動筒活塞桿限位,模型加入了電流限制和位置限制。
為了對上述方法設(shè)計的變負(fù)載電液作動伺服系統(tǒng)進行伺服性能和抗干擾性能驗證,建立了帶噪聲氣動壓力變負(fù)載閉環(huán)電液伺服作動系統(tǒng)AMESim 仿真模型,如圖15 所示。考慮到特種流量調(diào)節(jié)閥在實際工作中存在兩種工況,為此根據(jù)這兩種工況分別設(shè)計了仿真試驗。
工況1:進氣壓力變化時,閥后壓力在調(diào)節(jié)過程中保持恒定。設(shè)置仿真時間為10 s,閥前壓力在第0~2 s 保持150 kPa 不變,在第2~6 s 由150 kPa 按線性衰減到120 kPa,在第6~10 s 保持120 kPa 不變,如圖16(a)所示;同時,閥后壓力在第0~10 s 保持100 kPa不變,如圖16(b)所示。
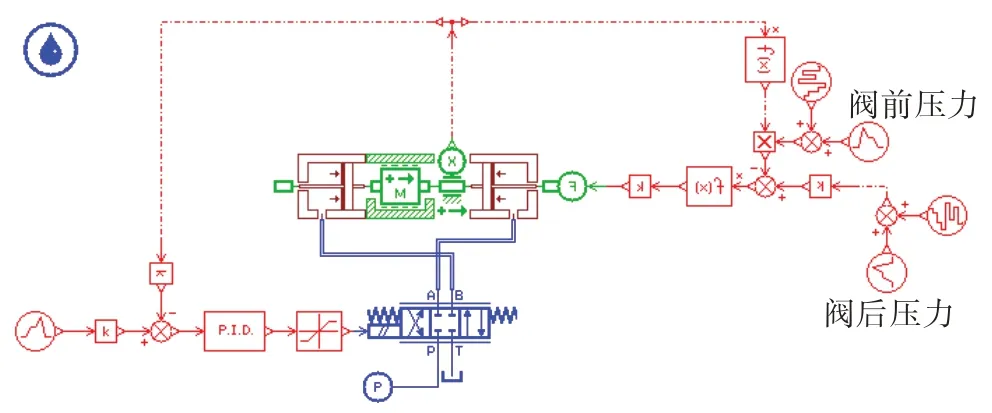
圖15 帶噪聲變負(fù)載閉環(huán)電液伺服作動系統(tǒng)AMESim仿真模型Fig.15 AMESim simulation model of variable load electro-hydraulic servo actuation system with noise
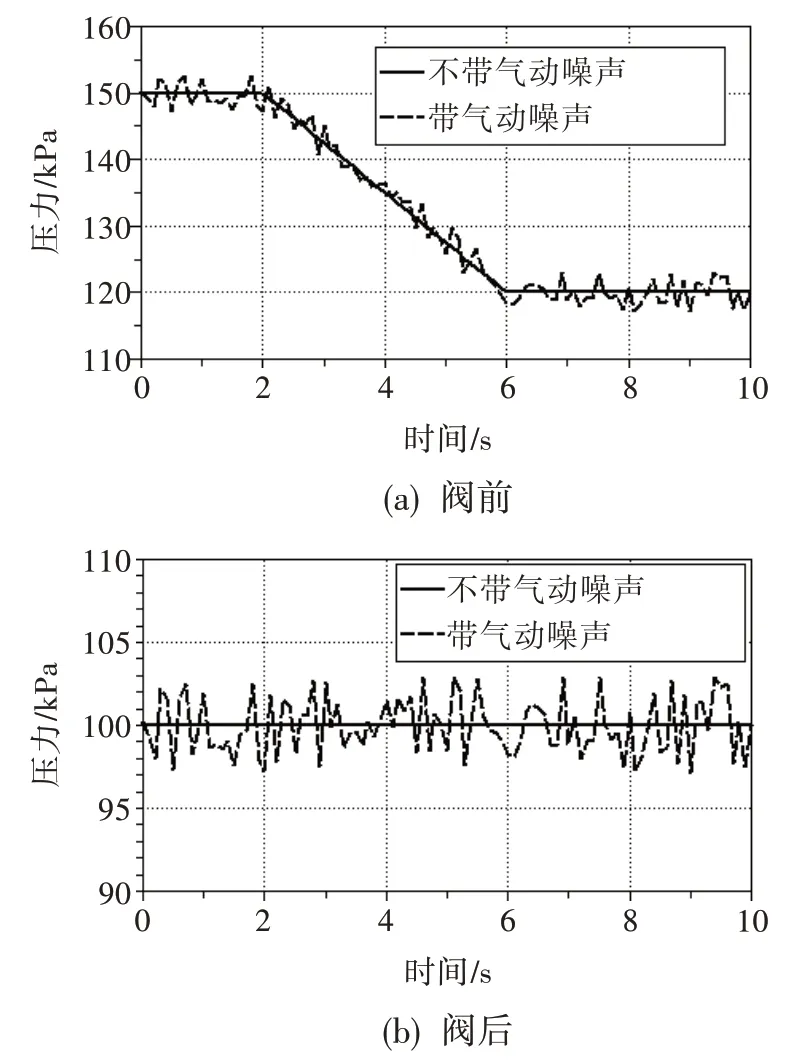
圖16 工況1 下閥前閥后壓力設(shè)置Fig.16 Pressure setting before and after valve under condition 1
液壓作動機構(gòu)位置指令按斜坡和正弦兩種情況輸入。斜坡指令在第0~2 s保持0 m 不變,在第2~7 s按線性增加到0.200 m,其后保持0.200 m不變;正弦指令在第0~10 s按y=0.05 sin(0.4πx)+0.150 變化。
在上述指令和帶噪聲閥前后壓力同時加入情況下,電液作動機構(gòu)的伺服性能和抗干擾性能的仿真結(jié)果如圖17 所示。從圖17(a)和圖17(c)可得,模型在斜坡指令下的輸出響應(yīng)相對誤差不大于1.20%,在正弦指令下的輸出響應(yīng)相對誤差不大于1.30%,具有良好的伺服跟蹤性能和抗干擾性能。從圖17(b)和圖17(d)可看出,作用在無級盤上的等效氣動載荷隨著作動筒活塞桿的運動而正相關(guān)變化,且變化范圍中最大值與最小值的比值分別接近于5.6 和1.6,表明了該建模方法對于氣動載荷變化大的流量調(diào)節(jié)閥電液伺服作動系統(tǒng)問題的有效性。
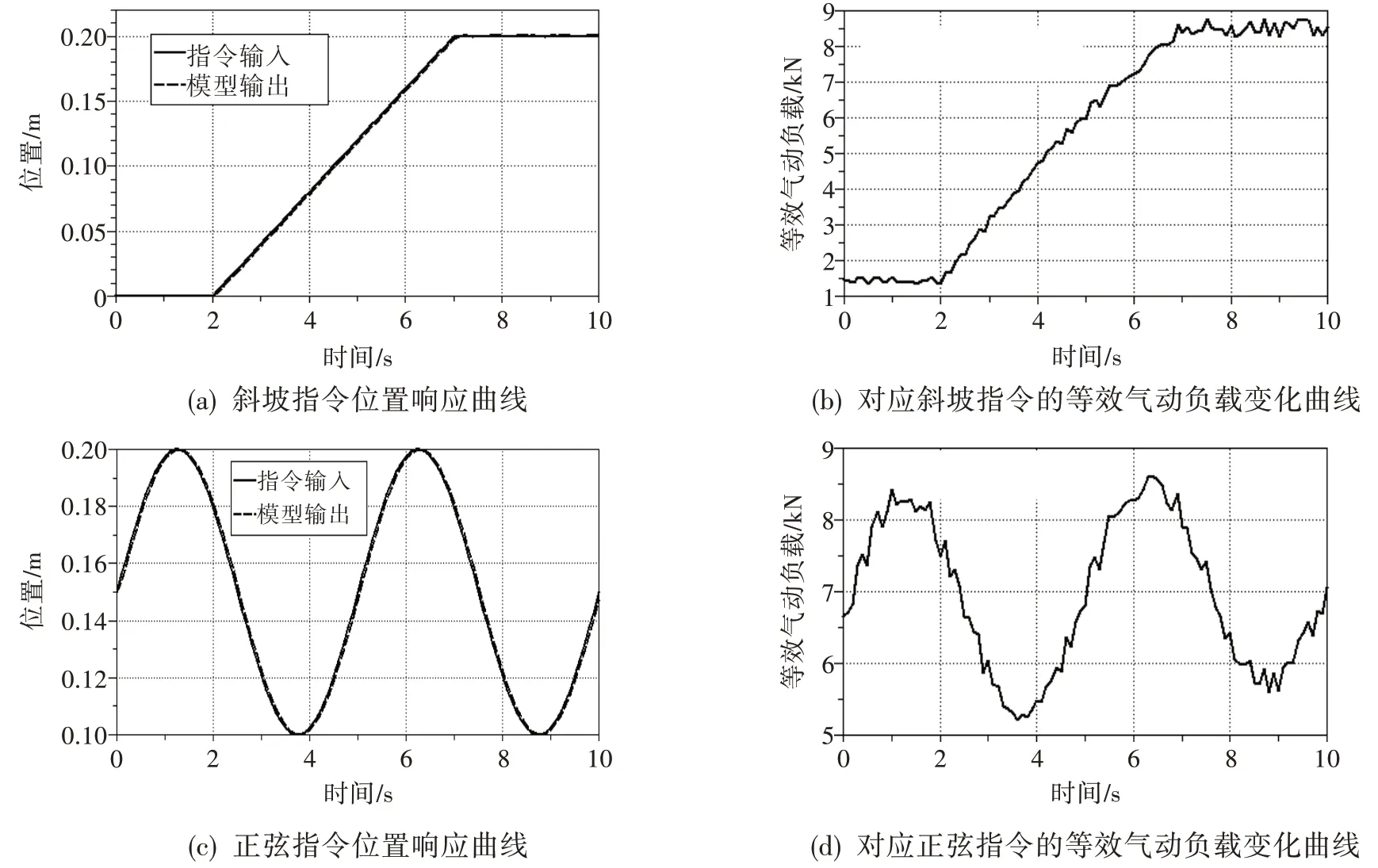
圖17 工況1 下仿真結(jié)果Fig.17 Simulation results under condition 1
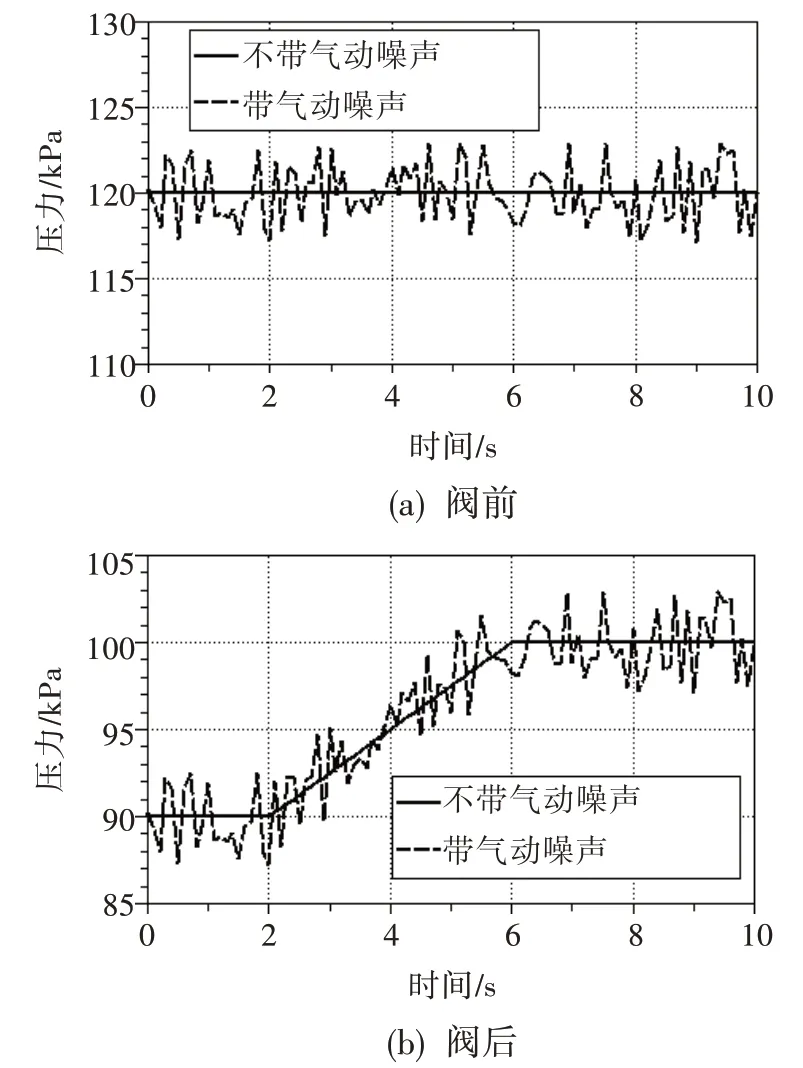
圖18 工況2 下閥前閥后壓力設(shè)置Fig.18 Pressure setting before and after valve under condition 2
工況2:進氣壓力保持恒定時,閥后壓力隨發(fā)動機進氣壓力變化。設(shè)置仿真時間為10 s,閥前壓力在第0~10 s 保持120 kPa 不變,如圖18(a)所示;同時,閥后壓力在第0~2 s 保持90 kPa 不變,在第2~6 s 由90 kPa 按線性增大到100 kPa,在第6~10 s 保持100 kPa不變,如圖18(b)所示。
加入與工況1 相同的斜坡和正弦指令,則在上述指令和帶噪聲閥前后壓力同時加入情況下,電液作動機構(gòu)的伺服性能和抗干擾性能仿真結(jié)果如圖19 所示。從圖19(a)和圖19(c)可得,模型在斜坡指令下的輸出響應(yīng)相對誤差不大于1.26%,在正弦指令下的輸出響應(yīng)相對誤差不大于1.40%,具有良好的伺服跟蹤性能和抗干擾性能。從圖19(b)、圖19(d)可看出,作用在無級盤上的等效氣動載荷隨著作動筒活塞桿的運動而正相關(guān)變化,且變化范圍中最大值與最小值的比值分別接近于4.3 和1.6,表明了該方法能有效應(yīng)用于氣動載荷變化大的流量調(diào)節(jié)閥電液伺服作動系統(tǒng)建模問題。
6 結(jié)論
(1) 針對高空臺全包線飛行環(huán)境模擬過程中流量調(diào)節(jié)閥氣動負(fù)載變化大難以快速調(diào)節(jié)以伺服跟蹤位置指令的問題,提出一種建立變負(fù)載電液作動機構(gòu)模型的建模方法,提高了變負(fù)載流量調(diào)節(jié)閥的建模準(zhǔn)確度。與試驗數(shù)據(jù)對比,模型最大相對誤差不大于1.78%。
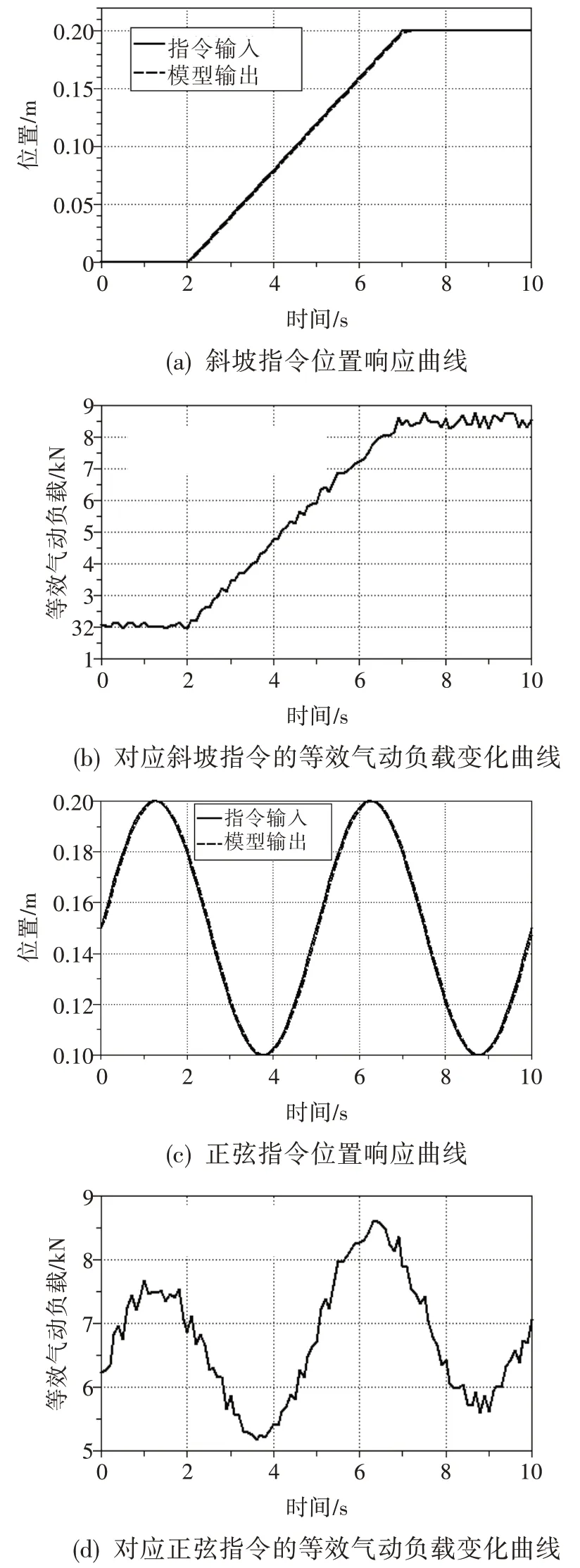
圖19 工況2 下仿真結(jié)果Fig.19 Simulation results under condition 2
(2) 在閥前、閥后氣動壓力干擾情況下進行了閉環(huán)伺服性能仿真驗證,其斜坡響應(yīng)最大相對誤差不大于1.26%,正弦響應(yīng)最大相對誤差不大于1.40%,具有良好的伺服跟蹤性能和抗干擾性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
儀器儀表用戶(2022年11期)2022-11-03 12:38:58
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
儀器儀表用戶(2022年5期)2022-05-06 09:02:30
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
石油化工自動化(2018年5期)2018-11-14 02:34:26
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19