基于計算機視覺的距離測量方法在電網工程審計中的應用研究
2019-11-12 12:01:33肖琴楊棟李均委王鴻羽余建琴周平
電腦知識與技術 2019年25期
肖琴 楊棟 李均委 王鴻羽 余建琴 周平

摘要:該文主要闡述計算機視覺獲取場景的距離信息的用兩種方法,通過對單目視覺法及雙目視覺法的優劣性分析比對,確定適用電網工程及輸電線路桿塔測距的技術路線,并對基于雙目視覺法的GRBD深度相機的距離檢測方法、基于活動目標跟蹤的桿塔數量統計方法,兩種技術的原理及在電網工程審計實務中的應用進行了科學分析研究,為探索運用信息化手段提高審計工作質效,實現數字化電網工程審計的新思路、新方法、新突破提供了理論支持及技術路線研究。
關鍵詞:計算機視覺;測距;工程審計
中圖分類號:TP391? ? ? 文獻標識碼:A
文章編號:1009-3044(2019)25-0227-04
Abstract: This paper mainly expounds two methods, principle and application of computer vision to obtain distance information of scene, it provides theoretical support and technical research for the realization of digital power grid engineering audit.
Key words: computer vision; measuring distance; engineering audit
1 背景
采用計算機視覺獲取場景的距離信息主要用兩種方法,按照處理光照的方式可以分為主動式和被動式。主動式方法是指控制光照的方式和光源的模式,拍攝光束在物體表面形成的圖像,然后依據幾何關系進行計算的方法,它又可分為結構光法和激光自動聚焦法,通常采用激光或雷達來獲取目標的距離及三維信息。但是激光測距不適用于測量高速的目標。被動式方法一般是指利用自然光或者均勻照明的方式,依據直接拍攝的物體圖像進行測量的方法,主要分為單目視覺法、雙目視覺法等。考慮到在輸電線路巡線無人機的高速性,能夠適用于該場景下主要的測距方法有單目視覺法、雙目視覺法和基于GRBD深度相機的距離檢測方法。
電網工程審計,主要審計電網建設過程中變電站、線路、桿塔、工程規模、線路長度是否規范合規,工程量是否足額完成,工程內容是否符合合同約定,因電網工程普遍存在點多線長面廣的特點,傳統人工、放線、車測等方式效率低,人工成本大,且成果不高。通過采用計算機視覺獲取場景的距離信息方法研究及應用實踐,為運用信息化手段提高審計工作質效進行了有效探索,實現數字化電網工程審計的新思路、新方法、新突破。
2 單目視覺法及雙目視覺法原理及比較分析
2.1 單目視覺法
單目標視覺指采用一個圖像采集設備對被測物體進行二維圖像采集,利用所得像點的坐標與被測物體的實際三維坐標之間的轉換關系以及光學約束條件,進行三維坐標還原的方法單目視覺法可分為三類:基于對焦的方法,基于離焦的方法和基于變焦的方法。
2.1.1 基于對焦的方法
在保持目標空間點與攝像機的距離(即物距)不變的情況下,改變成像平面的位置(即改變像距),在同一場景對同一目標物連續拍攝多幅圖像,因焦距的改變,同一空間點在多幅圖像中的像只有一個是最清晰的,通過清晰度判別的方法,對物體成像的邊緣紋理等特征進行分析,容易找到成像最清晰的圖片,結合相應的光學參數就可以得到深度值等信息。
雖然基于對焦的方法能夠通過調節焦距的步長來控制深度的分辨率,但是需要處理大量的序列圖像,計算量較大,而且光學參數的調節過程比較煩瑣,當場景紋理信息較少時,深度難以區分,分辨率也有限。
2.1.2 基于離焦的方法
與基于對焦的方法類似,在保持物距不變的情況下,改變像距或孔徑,對同一場景至少拍攝兩幅模糊的圖像,再對應兩組攝像機的參數,根據深度與模糊半徑及攝像機參數之間的幾何關系,可計算得出深度信息。
2.1.3 基于變焦的方法
在保持空間目標點和成像平面不動時,移動鏡頭位置或改變其他的攝像機參數,再改變攝像機的焦距值,使目標點在不變的像平面上成一組清晰但大小不同的像,焦距發生變化時,同一目標物體對應像的大小也發生變化,根據其像點位置在不同焦距下的變化大小可以計算出其目標點對應的深度值。
基于變焦的方法兼備了基于對焦和基于離焦方法的優點,并在一定程度上克服了兩者的缺點,它最少只需要獲取兩幅變焦圖像和焦距參數,該方法的處理速度快,實時性好,但是這種中心區域深度恢復的方式效果較差,像點位移參數估計的精度直接影響深度計算的誤差。
2.2 雙目視覺法
雙目視覺是仿照人類利用雙眼感知距離的原理,對目標物體進行三維信息獲取的方法。它是被動式測距方法中最重要的距離感知技術,是其他計算機視覺方法所不能取代的,具有廣泛的適應性。現已應用于機器人導航微操作系統的參數監測、三維測量以及虛擬現實等領域。
通過表1對比單目視覺和雙目視覺的優劣,可以看出,雙目視覺方法更適合進行輸電線路桿塔的距離測量。
3 雙目視覺法技術分析及在電網工程審計中的應用
3.1 基于雙目視覺法輸電線路距離檢測方法
3.1.1 圖像的預處理
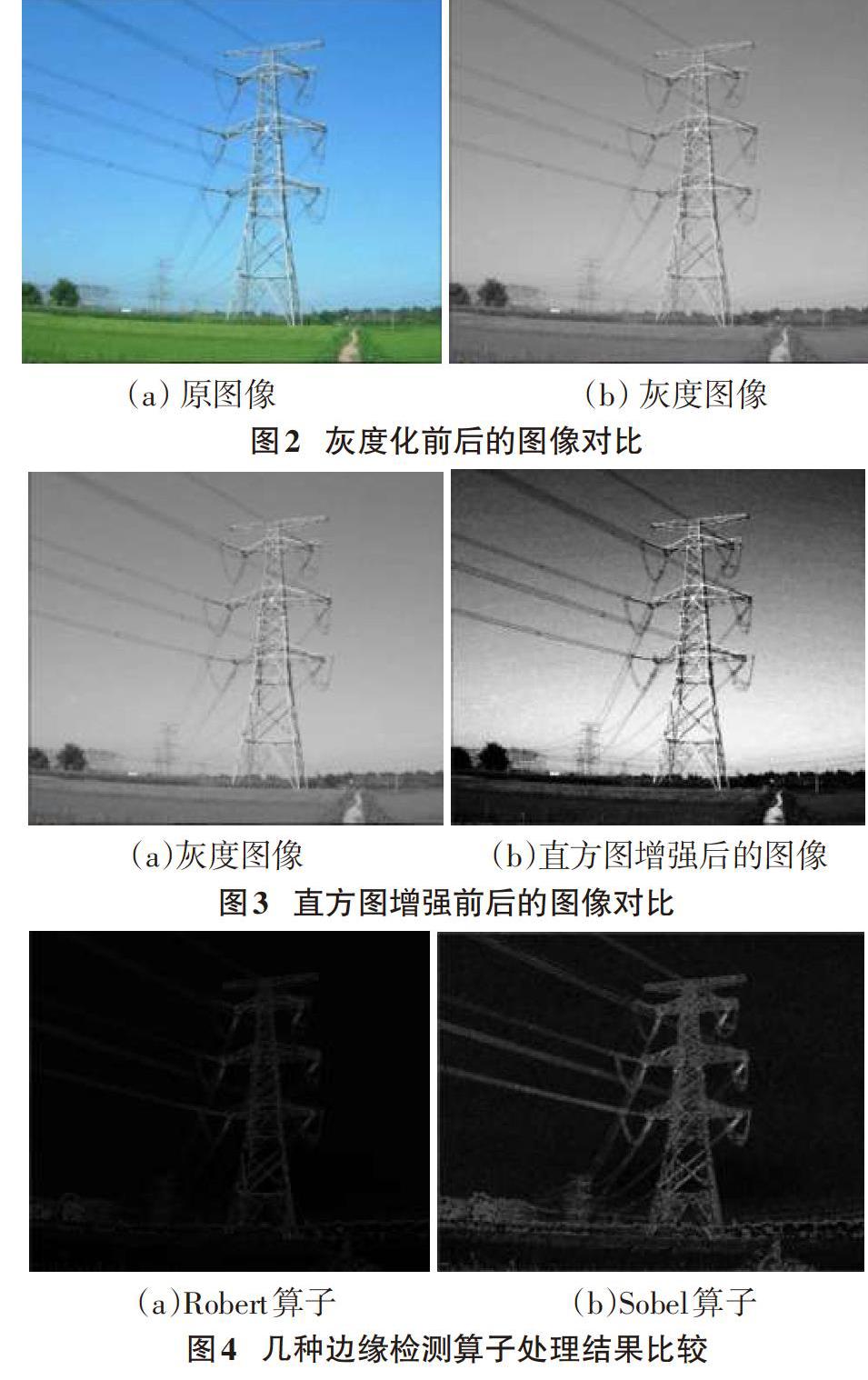
通過攝像機等圖像采集設備獲得的圖像,由于硬件設備本身的缺陷以及外界環境因素的干擾,往往包含一些隨機噪聲和畸變因素,降低了圖像的質量,這給人或計算機視覺的分析和理解帶來了較大影響,嚴重的情況下會導致分析結果的錯誤。為了遏制圖像質量的降低,對獲取的圖像進行預處理是十分必要的,以此來消除圖像噪聲,增強圖像細節,進而提高圖像的信噪比。圖像的預處理過程大致有如下幾步:圖像的灰度轉換、圖像增強、圖像濾波、邊緣檢測、圖像分割等。
3.1.2 雙目視覺的測距原理
雙目視覺發基于的是視差原理,眾所周知,幾乎所有具有是覺得生物都有兩只眼睛,他們在觀察物體是會產生遠近或者深淺的感覺。雙目視覺正是建立在這個原理的基礎上,利用兩個攝像機來代替人的雙眼,通過獲取同一被測物體的兩幅圖像,求出目標點在對應兩幅圖像中的視覺差異,以此來還原被測物體的空間位置。圖5展示了視差測距的原理過程,為了描述和計算的簡便,將模型簡化為“平行立體視覺系統”。
3.1.3 雙目視覺距離測量系統的構成
雙目視覺測量距離下的系統構成如圖6所示:
整個系統包括硬件和軟件兩大部分,大致的實驗流程為:首先利用兩個CCD攝像機分別拍攝被測目標的物體,然后通過圖像采集卡接收攝像機送出的模擬視頻信號并轉變為數字信號送入計算機,這個傳輸過程可以通過數據線或者無線網絡進行,同時記錄下兩個攝像機之間以及它們與被測目標物之間的相對位置關系,然后在計算機內通過軟件編程實現對獲取圖像的預處理和匹配,進而依據雙攝像機與被測物體的幾何關系,然后對攝像機內外參數進行標定,最終實現空間目標物的距離測量。
3.1.4 雙目視覺距離測量系統流程
雙目視覺系統的距離測量流程步驟如下:
步驟1:獲取圖像,即是采用雙目相機對目標進行拍照,獲取目標的圖像。
步驟2:攝像機標定,計算機視覺研究的對象是基于攝像機(或相機)所拍攝物體的圖像,這些圖像都是空間中的物體經過透視變換所形成的,因此世界坐標系下的點和圖像上對應的成像點之間必然存在一種固定的映射關系成像幾何模型來反應。攝像機的標定就是為了得到這種關系,對該幾何模型的未知參數進行求解的過程。這些參數的求取需要通過實驗測量與計算。
步驟3:圖像預處理,指的是在對采集到的圖像進行分析和理解之前,為改善圖像質量,抑制畸變,或增強某些對后續處理具有重要意義的圖像特征的處理手段。雙目視覺同大多數視覺過程一樣,識別處理之前也要經過圖像預處理階段,其本質目的是服務和方便于后繼處理,好的處理方案可以有力地提升識別的精度和速度。
步驟4:圖像匹配,是指針對不同攝像機或者同一攝像機下在不同成像條件下對同一目標物拍攝的兩幅或多幅的圖像通過一定的匹配算法識別出同名點,或根據已知模式到待匹配圖像中尋找相對應模式的過程。
步驟5:三維還原,即是對基于雙目視覺原理對匹配過后的圖像進行三維還原,從而獲取目標對象的三維信息。
步驟6:測距計算,最后依據三維幾何模型來進行測距等計算。
3.2 基于GRBD深度相機的距離檢測方法
RGBD深度相機是一種能夠直接測量出所拍攝到物體距離信息的相機,該相機通過安裝距離傳感器的方式進行感知距離信息,并將距離信息保存在到圖片中,即是拍攝到的圖片包含了RGBD的信息。其中RGB色彩模式是工業界的一種顏色標準,是通過對紅(R)、綠(G)、藍(B)三個顏色通道的變化以及它們相互之間的疊加來得到各式各樣的顏色的,RGB即是代表紅、綠、藍三個通道的顏色,這個標準幾乎包括了人類視力所能感知的所有顏色,是目前運用最廣的顏色系統之一。D表示的是Depth Map,在3D計算機圖形中,Depth Map(深度圖)是包含與視點的場景對象的表面的距離有關的信息的圖像或圖像通道。其中,Depth Map 類似于灰度圖像,只是它的每個像素值是傳感器距離物體的實際距離。通常RGB圖像和Depth圖像是配準的,因而像素點之間具有一對一的對應關系,從而構成了RGBD圖片。因而,可以直接通過在無人幾種裝設GRBD深度相機傳感器來獲取無人機與桿塔之間的距離信息。
3.3 基于活動目標跟蹤的桿塔數量統計方法
視覺目標跟蹤是計算機視覺中的一個重要研究方向,有著廣泛的應用,如:視頻監控,人機交互,無人駕駛等。過去二三十年視覺目標跟蹤技術取得了長足的進步,特別是最近兩年利用深度學習的目標跟蹤方法取得了令人滿意的效果,使目標跟蹤技術獲得了突破性的進展。目標跟蹤是指在視頻中跟蹤某一個或多個特定感興趣對象的過程,不管物體如何運動,甚至是遮擋都能準確找出目標。另外,目標跟蹤還要求在給定視頻序列的條件下,預測后續幀中該目標的大小與位置。
考慮到進行無人機巡檢時,拍攝的圖像或是視頻前后時間間隔很小,對于同一個桿塔而言,視頻中前后兩幀桿塔的位置會有很大程度的重疊,因而輸電線路桿塔的數量統計問題本質上就是一個活動目標檢測問題,當圖像先后兩幀桿塔的位置有很大重復時就不用計數,但是視頻中出現新的沒有重復的桿塔時就計數,從而實現桿塔數量的統計。
4 應用效果分析
通過基于雙目視覺法輸電線路距離檢測方法、基于GRBD深度相機的距離檢測方法、基于活動目標跟蹤的桿塔數量統計方法的研究與應用,實現信息化方法與高技術含量設備的有效結合,實現了桿塔間距離測定、長距離線路距離測定和長距離間基于活動目標測定的桿塔數量測定,為新形勢下電網工程審計提供了新的思路和方法,有效提高了現場工程量真實性、規范性、合規性審計的質量與效能。
參考文獻:
[1] 周華強, 胡廣平. 基于計算機視覺的遠距離動態前景測距方法[J]. 科學技術與工程, 2013(35): 10722-10726.
[2] 基于差分能量水印和Hausdorff距離的圖像認證與匹配算法研究[D]. 合肥: 合肥工業大學, 2014.
[3] 基于距離測度學習的圖像分類方法研究[D]. 上海: 復旦大學, 2010.
[4] 張寧. 基于關聯基準的單目視覺遠距離坐標測量方法的研究[D]. 天津: 天津大學, 2008.
【通聯編輯:謝媛媛】
