一種可提高轉矩輸出能力的高速列車牽引電機方波工況單環弱磁控制策略
2019-11-08 08:05:58楊中平朱龍勝牟述佳
鐵道學報 2019年10期
關鍵詞:控制策略
李 華,林 飛,楊中平,朱龍勝,牟述佳
(1.北京交通大學 電氣工程學院,北京 100044;2.中車青島四方車輛研究所有限公司,青島 266000)
對于高速列車牽引傳動系統,實現全速域高性能控制非常重要。鼠籠型感應電機以其結構簡單、結實可靠的特點得到廣泛的應用。當牽引電機在額定速度以下運行時,轉子磁鏈一般保持在額定值不變,電機輸出轉矩可以完全由轉矩電流控制。當電機運行在弱磁區時,由于電機電壓受限,電機輸出轉矩隨著速度上升而減小。此時,合適的弱磁控制策略顯得十分重要,其可提高電機輸出轉矩和帶載能力[1]。
弱磁控制的性能與轉子磁鏈指令密切相關,但是牽引電機在高速區運行時,負載變化以及直流側電壓的擾動使得轉子磁鏈指令難以計算,從而影響輸出轉矩[2]。最便于實現的是反比例弱磁控制[3-5],即轉子磁鏈指令與電機轉速成反比,但所需電壓有可能超出逆變器的電壓輸出范圍。文獻[6-8]按照電機模型計算轉子磁鏈指令,但電機參數的變化會導致控制效果不理想。文獻[9-12] 通過逆變器最大電壓與實際輸出電壓的誤差作為電壓控制器的輸入,基于電壓調節器得到勵磁電流指令值,提高了弱磁控制策略的魯棒性。文獻[13]進一步分析對比了幾種基于電壓調節弱磁控制策略的優缺點。文獻[14]采用離線查表法,勵磁電流指令和轉矩電流指令均通過查表得到。
以上所提弱磁控制策略都是采用PWM調制技術,而在大功率牽引傳動系統中,在牽引電機進入弱磁區之后,通常會進入方波工況以充分利用直流母線電壓并降低逆變器的開關頻率[15]。在方波工況下,電機電壓矢量幅值保持不變,傳統矢量控制不再適合,因為傳統矢量控制需要對感應電機定子電壓的幅值和角度隨時保持可控,方波工況下只有定子電壓角度能夠調節,如果仍采用傳統矢量控制,會因兩電流控制器相互沖突造成飽和,甚至影響電機正常運行。因此,弱磁控制策略需要考慮逆變器工作在方波模式下的情況。文獻[16]在電機進入方波工況后不再采用雙電流控制器,現有的部分高速列車也是采用類似電流開環控制方案,這種方法降低了電流的動態性能。文獻[18-19]在文獻[17]的基礎上進一步考慮了方波工況時的限制條件和磁場定向問題。文獻[20]針對于永磁同步電機,提出了一種新的基于交直軸電流耦合的單電流調節器控制策略,在弱磁區采用單電流控制器,交軸電壓指令根據電機工況自行調節,該控制策略解決雙電流調節器在電機高速域相互沖突而易于飽和的問題。
針對以上問題,本文在傳統的雙電流環矢量控制策略的基礎上做了改進,針對方波工況下的特殊情況,在考慮直流側電壓、電流限制和負載變化的情況下,提出了一種新型電流閉環弱磁控制策略。該策略適合于方波工況,同時也可以保證電機在全速域轉矩輸出能力,提升方波工況下電流跟蹤響應能力。最后,完成了所提出方波控制策略的實驗驗證。
1 感應電機數學模型及原理分析
在同步坐標系下,鼠籠型感應電機電壓和磁鏈方程可以表示為
us=Rsis+jωeψs+pψs
ur=Rrir+jωslψr+pψr
ψs=Lsis+Lmir
ψr=Lrir+Lmis
(1)
式中:p為微分算子;us、ur分別為定、轉子電壓矢量;is、ir分別為定子、轉子電流矢量;ψs、ψr分別為定子、轉子磁鏈矢量;Rs、Rr分別為定子、轉子電阻;Ls、Lr、Lm分別為定子電感、轉子電感和互感;ωe、ωsl分別為定子、轉差角頻率。
對于采用鼠籠型感應電機的轉子磁鏈定向控制系統,ur=0,ψrq=0,因此由式(1)可以可得
(2)
式中:usd、usq分別為定子電壓d、q軸分量;isd、isq分別為定子電流d、q軸分量;σ為漏感系數;ωr為轉子角頻率。
在高速區時,穩態下d、q軸電壓方程可以表示為
(3)
在同步坐標系下,電機轉矩方程可以表示為
(4)
式中:np為極對數。
1.1 可調電壓裕量對電流控制器性能的影響
矢量控制系統的信號流圖如圖1所示,即電流控制器的輸出為電機的電壓指令。
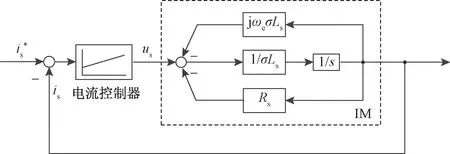
圖1 矢量控制信號流圖
由圖1得,電流控制器可調電壓裕量us_reg為
us_reg=Usmax-us
(5)
式中:us為定子實際電壓;Usmax為逆變器可輸出最大電壓,取決于脈寬調制策略,方波下逆變器可輸出最大電壓為
(6)
式中:Udc為直流側電壓。
隨電機速度增加,感應電機的實際電壓不斷上升,逆變器調制比m增大,留給電流控制器可調節的電壓越來越少,如圖2所示,圖中m1為臨界調制比,其大小取決于控制策略、延時等因素。
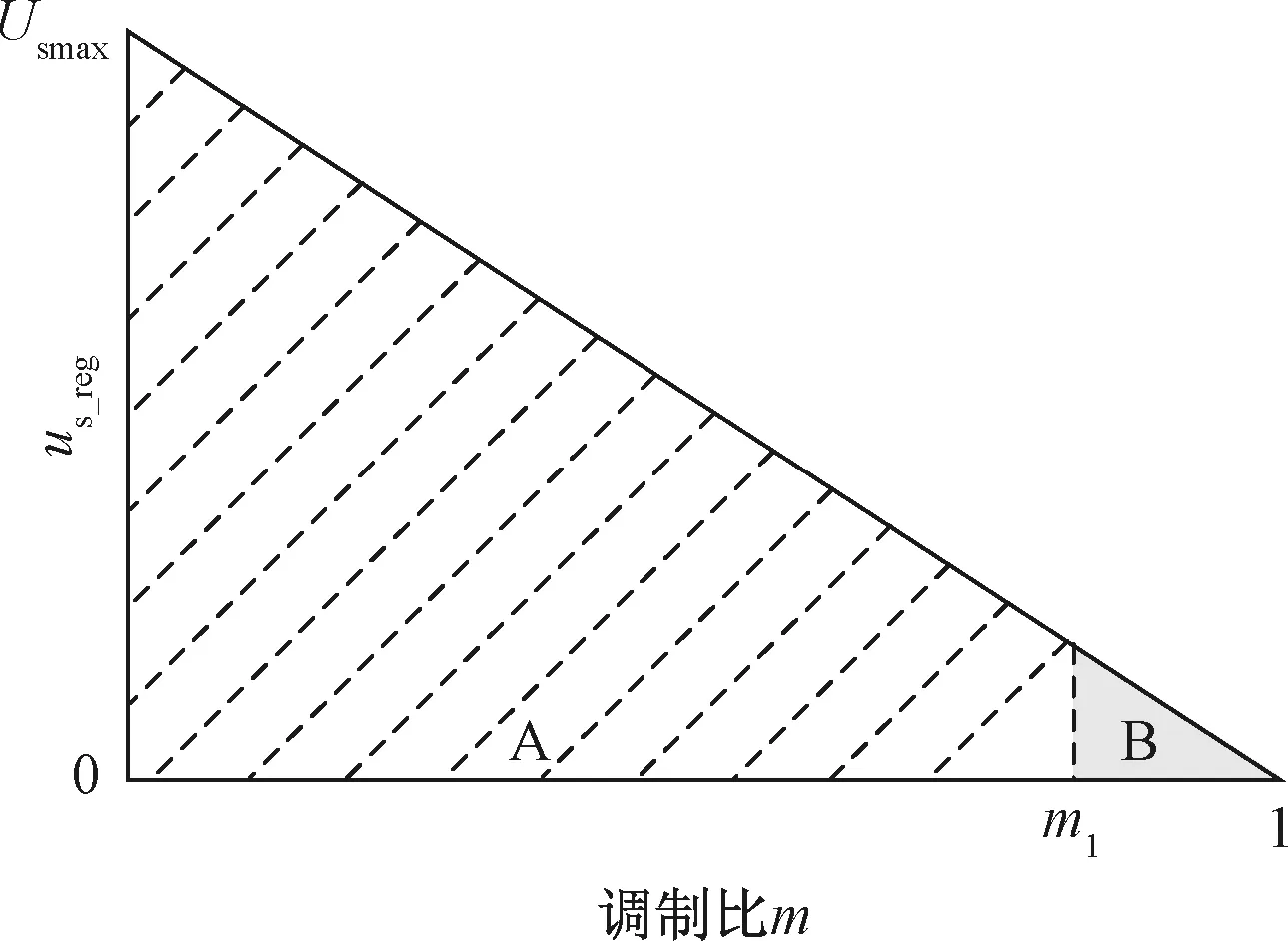
圖2 電流控制器可調節電壓裕量和調制比的關系
當調制比m
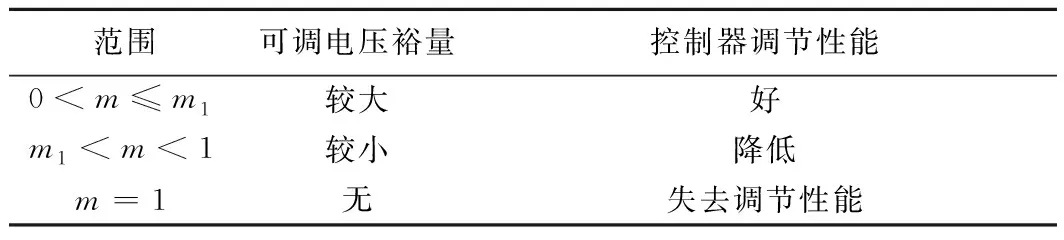
表1 電流控制器調節性能與調制比的關系
由表1可得,當電機進入方波工況,采用雙電流環矢量控制策略不再適合,需要對其進行改進,以滿足方波工況的特殊的需求。
1.2 電流和電壓限制下最大轉矩輸出
當感應電機運行弱磁區時,電機可輸出最大轉矩取決于定子電壓和電流的限制。電機最大電壓由逆變器直流側電壓和調制策略決定,最大電流由逆變器可輸出最大電流和電機額定電流決定。因此,感應電機在弱磁區電流和電壓限制表示為
(7)

(8)
式中:Ismax為電機可輸出最大電流。
將式(3)代入電壓限制方程式(7)可得
(9)
在isd-isq坐標系下,式(4)表示為一條雙曲線,式(8)表示為一個圓,其半徑只由電機可輸出最大電流決定,式(9)表示為一個橢圓,其半軸由直流側電壓、電機參數和電機定子角頻率決定,橢圓隨著電機頻率增加而逐漸縮小,如圖3所示。顯然,電機的電流矢量必須在電流限制圓和電壓限制橢圓的公共區域運行。
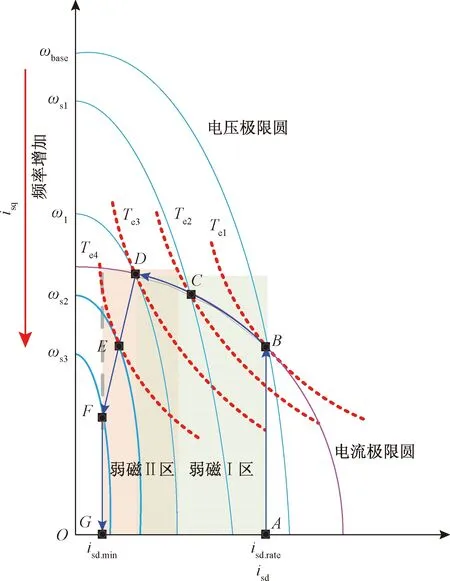
圖3 isd-isq坐標系下電機限制條件
當電機在額定角頻率ωbase以下運行時,此時電機電壓還沒有達到最大電壓限制,只需要滿足電流限制即可,對于高速列車來說,勵磁電流isd一般給定為額定值isd.rate,而通過轉矩電流isq來控制電機的轉矩,因此,電機電流矢量運行軌跡為A→B。
當電機速度等于ωbase時,電機工作在B點,此時轉矩電流達到最大值,電機輸出轉矩最大。同時,電壓極限橢圓恰好穿過B點,因此電機電壓也達到最大值。根據式(8)和式(9),可以求解得到

(10)
當電機速度超過ωbase后,電壓限制橢圓繼續縮小,電機定子達到最大電壓限制條件。為了滿足電機限制條件,勵磁電流必須減小。由圖1可得,當電機速度在ωbase和ω1之間時,電機輸出最大轉矩的電流矢量軌跡為B→D。
當電機速度等于ω1時,電機工作在D點。當電機速度繼續升高時,為了充分利用逆變器輸出電壓,需要減小電機電流幅值,電機將不再工作在恒功率區,而是工作在恒電壓區,一般稱恒功率區為弱磁Ⅰ區,恒電壓區為弱磁Ⅱ區,D為二者的臨界點。
當電機速度超過ω1,電壓極限橢圓繼續縮小,此時只要滿足電壓限制就一定滿足電流限制,為了輸出最大轉矩,根據式(4)和式(9),利用拉格朗日乘數法,可求得

(11)
根據式(11),可求解得勵磁電流和轉矩電流的關系為

(12)
當電機在弱磁Ⅱ區運行時,最大轉矩輸出電流運行軌跡不再是電流極限圓和電壓極限橢圓的交點,而是轉矩雙曲線和電壓極限橢圓相切的交點,即勵磁電流和轉矩電流滿足關系式(12)。因此,當電機速度大于ω1時,電機輸出最大轉矩的電流矢量軌跡為D→F。同時,由式(11)、式(7)和式(8)可得,臨界頻率ω1為
(13)
當電機速度繼續增大,勵磁電流減小到最小勵磁電流isd.min時,將不能再減小,即速度大于ωs3時,電機電流矢量軌跡為F→G。以上分析可得電機在弱磁區最大轉矩時電流矢量的運行軌跡。
1.3 d、q軸電流限制
由1.2節分析可得,牽引電機勵磁電流isd一般不超過額定勵磁電流isd.rate,同時為了保證電機正常工作,不能低于isd.min,因此,勵磁電流需要滿足
(14)
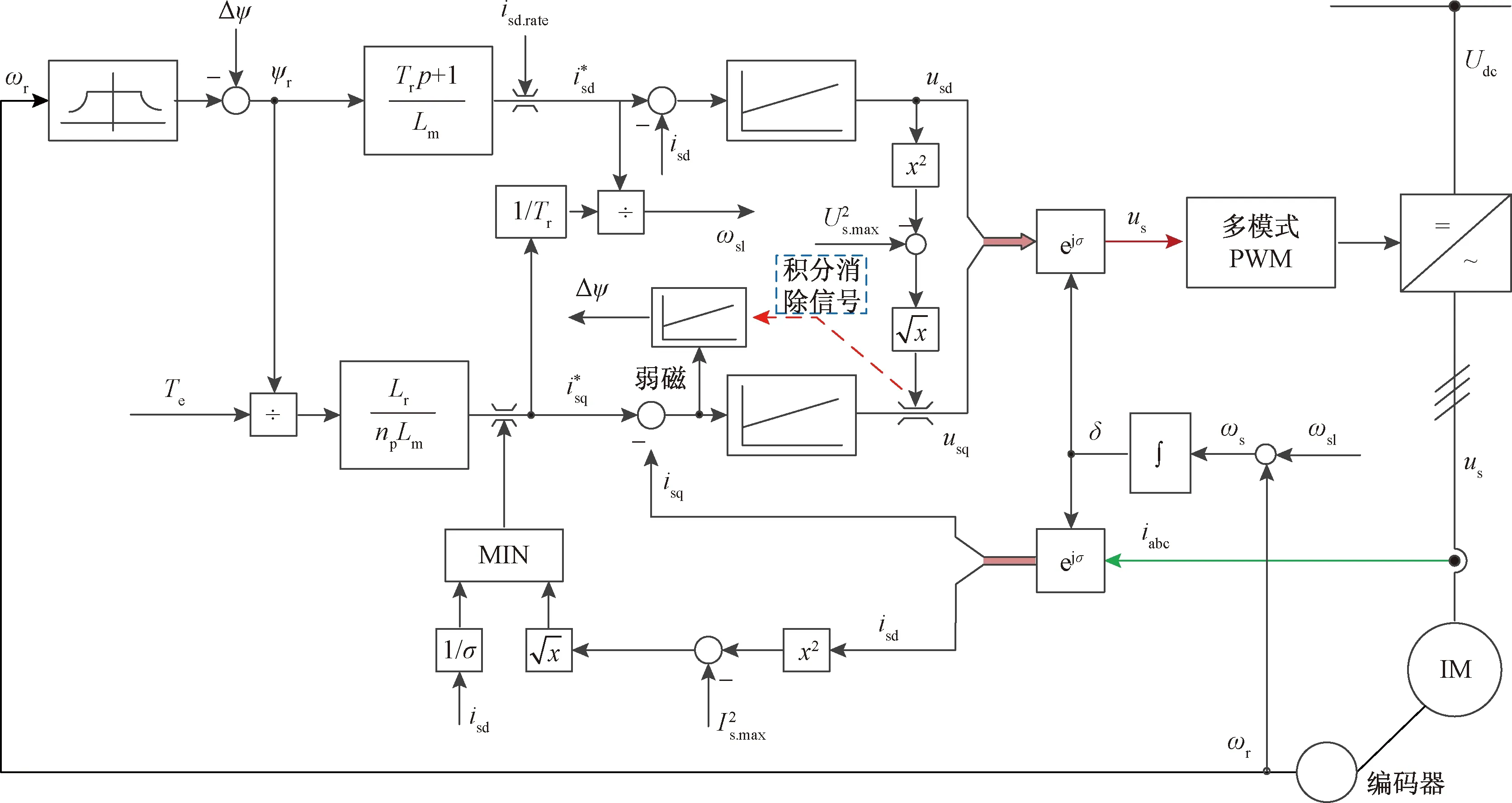
圖4 牽引電機全速域矢量控制示意圖
根據式(8)和式(12),可得轉矩電流需要同時滿足
(15)
2 方波單環弱磁控制
根據前對電機運行工況的理論分析,本文提出了牽引電機全速域矢量控制策略,如圖4所示。當電機速度小于ωbase時,采用傳統雙電流環矢量控制策略,如圖5所示。
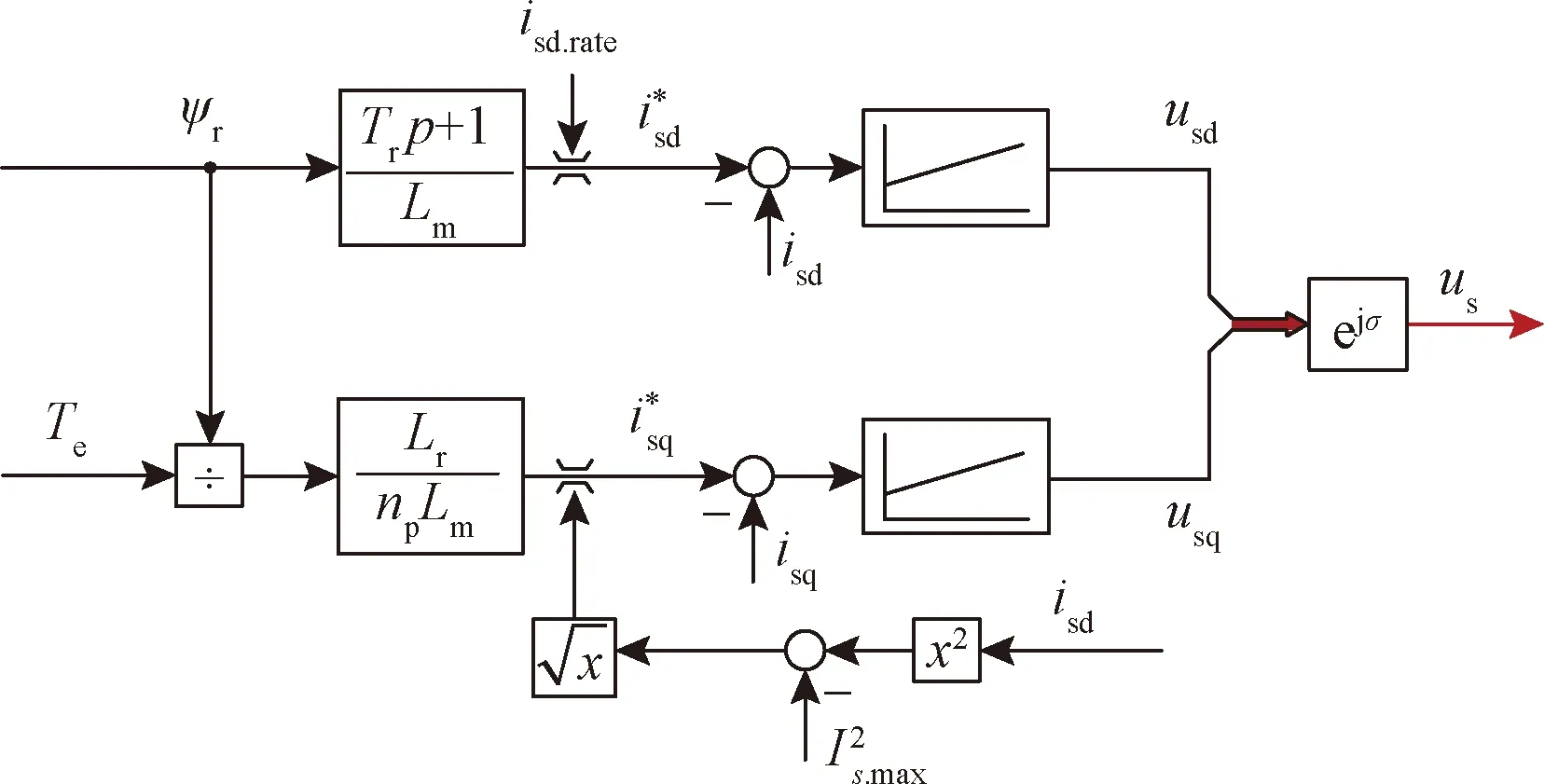
圖5 雙電流環矢量控制示意圖
當電機速度超過ωbase,進入方波工況,為了保證最大電壓限制條件,采用單環控制策略,如圖6所示。此時,q軸指令電壓usq通過d軸電壓指令值usd和最大電壓Usmax計算得到。這樣保證了電機在方波工況運行時,電壓指令始終為在電壓限制橢圓上,此時需要合理調節轉子磁鏈,保證電流的動態性能。因此,弱磁控制器根據q軸電流誤差來調節轉子磁鏈,保證d、q軸電流分量的合理分配,使電流矢量在電流極限圓和電壓極限橢圓的交點上運行。
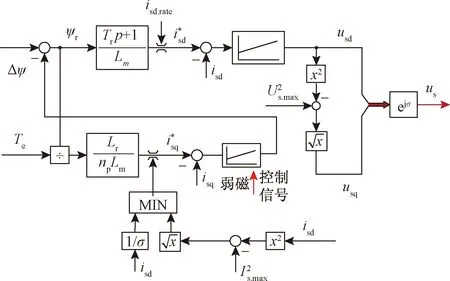
圖6 方波單環弱磁控制策略
電機在進出方波時,能否實現平滑過渡,取決于良好的切換控制策略。當電機速度小于ωbase,d、q軸電壓和最大電壓限制關系為

(16)
當電機速度超過ωbase時,電機進入方波工況,電機電壓達到最大電壓限制。此時d、q軸電壓和最大電壓限制關系為

(17)
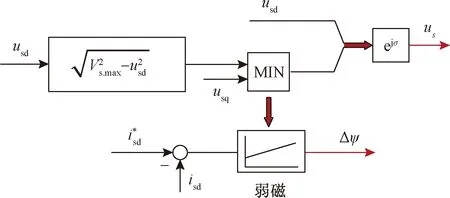
圖7 切換控制策略示意圖
2.1 可控性分析
電機控制的目的是準確而快速的輸出期望的轉矩。以恒速變載工況為例,分析電機控制。
根據式(3)和式(4),可得電機輸出轉矩在d、q軸電壓坐標系下的表達式
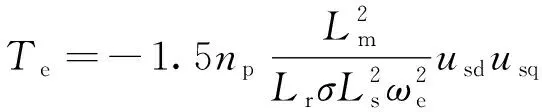
(18)
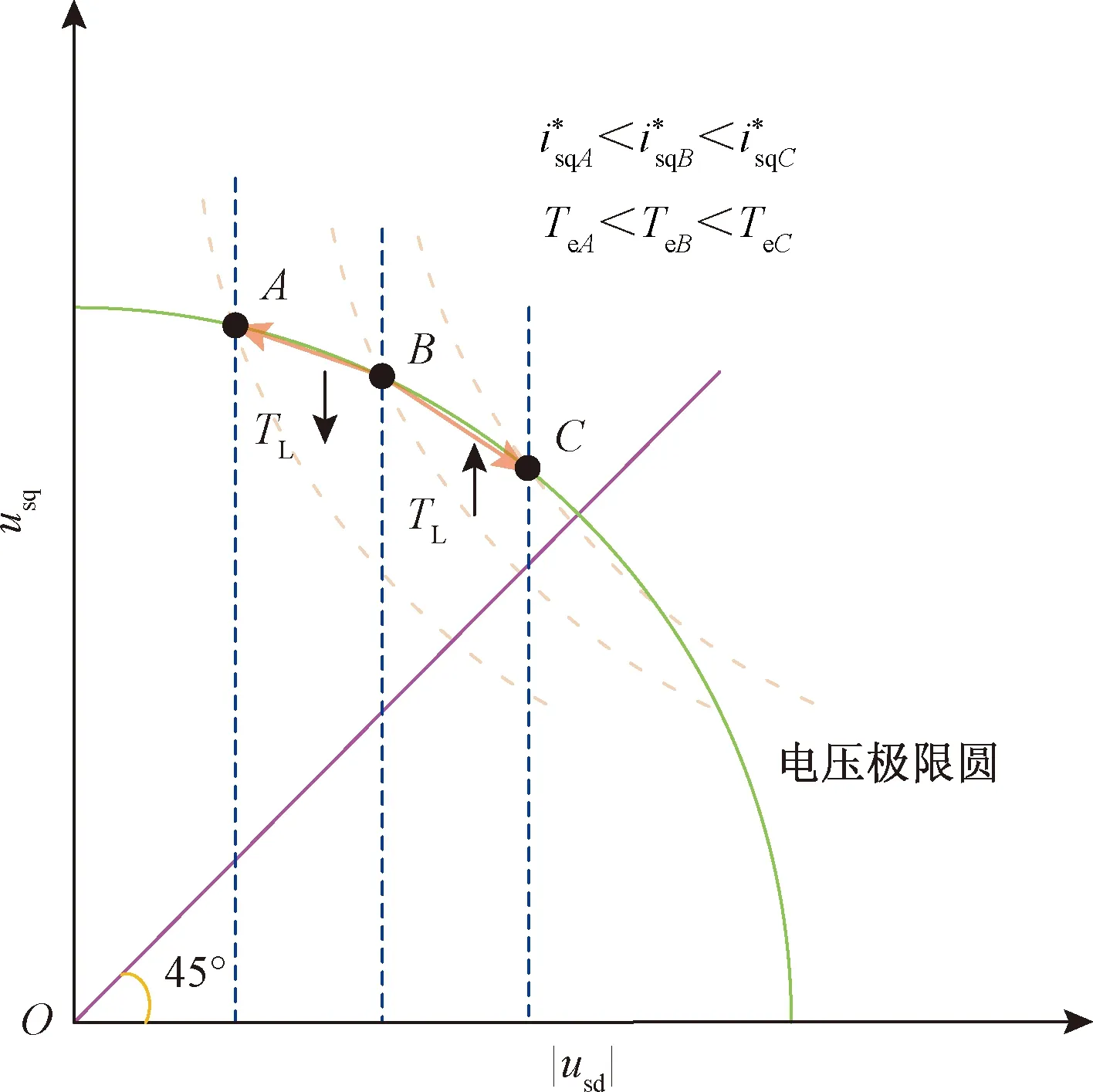
圖8 負載變化時d、q軸電壓變化情況

同理,負載轉矩TL或者轉速指令減小時,電機運行從B點向A點移動。
2.2 弱磁控制器設計
在進入方波工況前,電壓usq控制來控制轉矩電流isq,而進入方波工況后,isq不再是通過q軸電壓usq控制,因此如果把usq看作擾動,由式(1)可得isq和isd表達式
(19)

可得勵磁電流和轉矩電流的傳遞函數示意圖,見圖9

圖9 勵磁電流和轉矩電流的傳遞函數示意圖
因此,可得其開環傳遞函數為

(20)
采用串聯工程設計方法來確定控制器參數,可令1+sTd≈sTd,傳遞函數可以簡化為

(21)
式中:τ=kp/ki。
采用三階最佳設計法得控制器參數為
(22)
3 實驗結果分析
基于中車青島四方車輛研究所的CRH5型車實驗平臺,對全速域矢量控制算法進行了實驗驗證。實驗平臺采用CRH5型車動車組實際的牽引控制器(TCU),通過dSPACE仿真器來模擬牽引傳動系統的特性和外部環境。
牽引電機采用CRH5型車國產化電機參數,實驗平臺參數見表2。牽引電機轉矩和磁鏈指令按照CRH5型車電機特性曲線給定。算法中坐標變換采用等幅值原則,牽引電機定子電壓幅值最大值Vsmax為2 292 V。
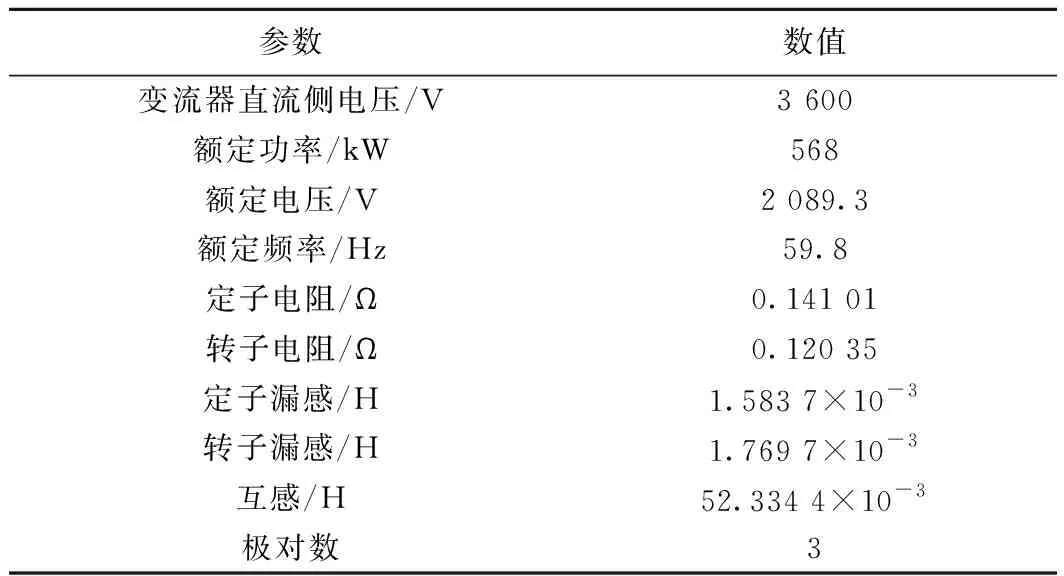
表2 牽引電機實驗平臺參數
通過上位機控制電機從600 rad/min加速到3 200 rad/min,轉速和相電流波形如圖10所示,d、q軸電流波形如圖11所示,電機進入方波時d軸電流跟蹤情況、相電流波形和相電壓脈沖的波形如圖12所示。在恒轉矩區,電機電流幅值保持不變,勵磁電流isd等于額定值isd.rate。當電機進入恒功率區且電機電壓還沒有達到逆變器可輸出最大值時,電機電壓隨著速度增加而上升。為保持恒功運行,相電流幅值隨著速度上升而減小,此時轉矩和磁鏈指令都隨著速度上升而減小,d、q軸電流也相應的減小。當電機進入方波工況時,電機電壓幅值保持最大值不變,此時方波單環弱磁控制算法生效,為提高轉矩輸出,勵磁電流isd隨速度上升而略有減小,相電流的幅值基本不變。
由圖11可以看出,電機進入方波工況時,實際d、q軸電流始終與指令值保持一致。由圖12可知,相電流和d軸電流在電機進入方波切換算法時沒有沖擊,這也驗證了本文所提出的切換策略的有效性。
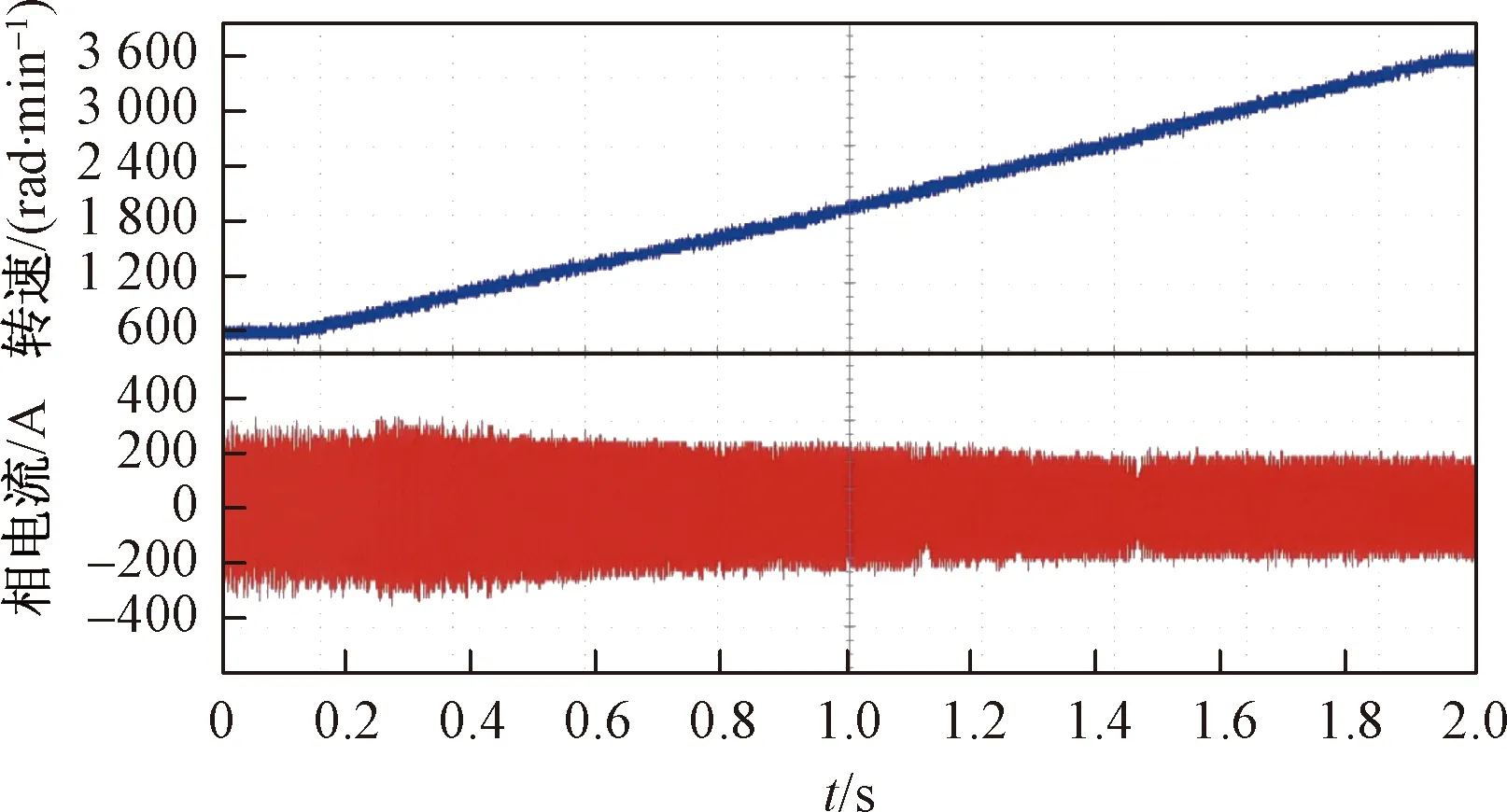
圖10 轉速和相電流波形
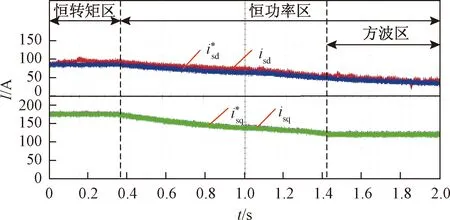
圖11 d、q軸電流跟蹤情況
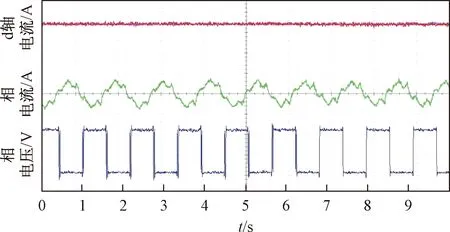
圖12 進入方波時相電壓脈沖和電流波形
圖13為電機從600 rad/min加速到3 200 rad/min時,相電壓幅值和弱磁控制器輸出波形。圖14為d、q軸定子電壓波形。在電機未進入方波工況時,d、q軸定子電壓絕對值隨著速度上升而增大,相電壓不斷增加,此時,弱磁控制器不起作用。當電機進入方波工況以后,電機電壓達到逆變器可輸出最大電壓,弱磁控制器作用,勵磁電流isd減小,從而使q軸電壓usq不再隨著速度上升而增大,電機電壓us維持在逆變器可輸出最大電壓。
圖15為采用本文所提出方波單環弱磁控制和傳統反比例弱磁控制電機輸出電磁轉矩對比。可以看出,當牽引電機在弱磁區運行時,采用本文所提出控制策略相比于傳統反比例弱磁控制電機輸出轉矩有了明顯的提升,平均提升轉矩6.5%。
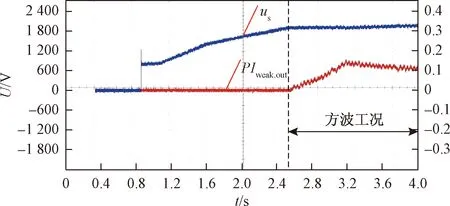
圖13 定子電壓和弱磁控制器輸出波形
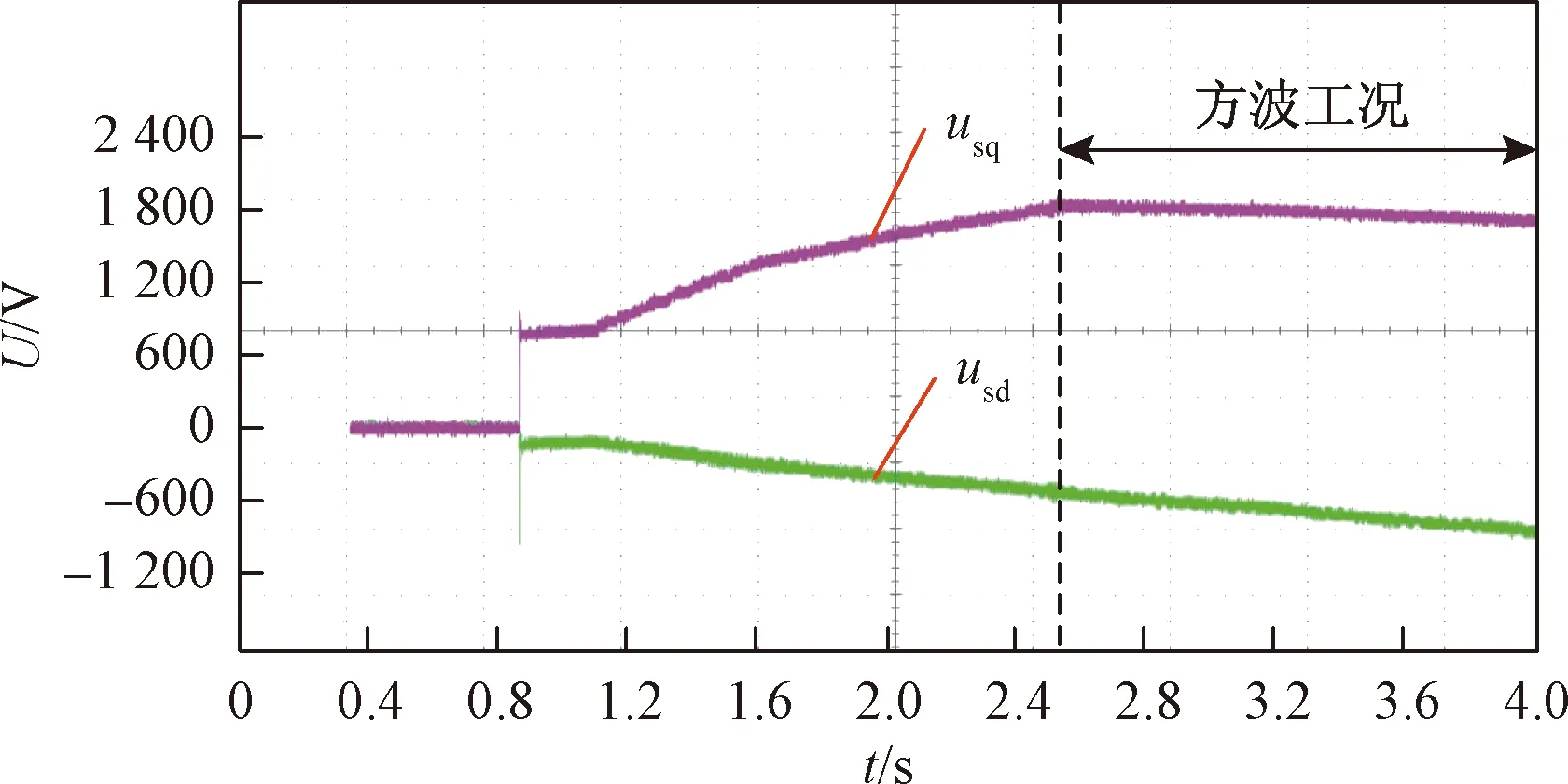
圖14 d、q軸定子電壓波形
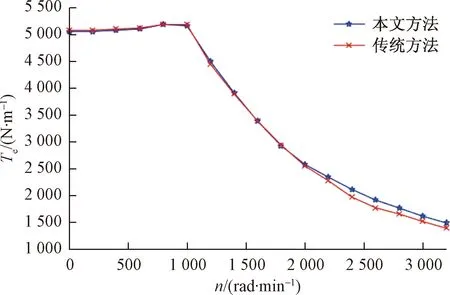
圖15 牽引電機在不同速度下轉矩輸出
圖16和圖17分別為牽引電機在方波工況下以恒速2 600 rad/min運行轉矩指令突變時,d、q軸電流和相電流瞬態響應波形。轉矩指令從2 000 N·m階躍到2 400 N·m,再減小到1 600 N·m,可以看出勵磁電流和轉矩電流動態響應迅速。
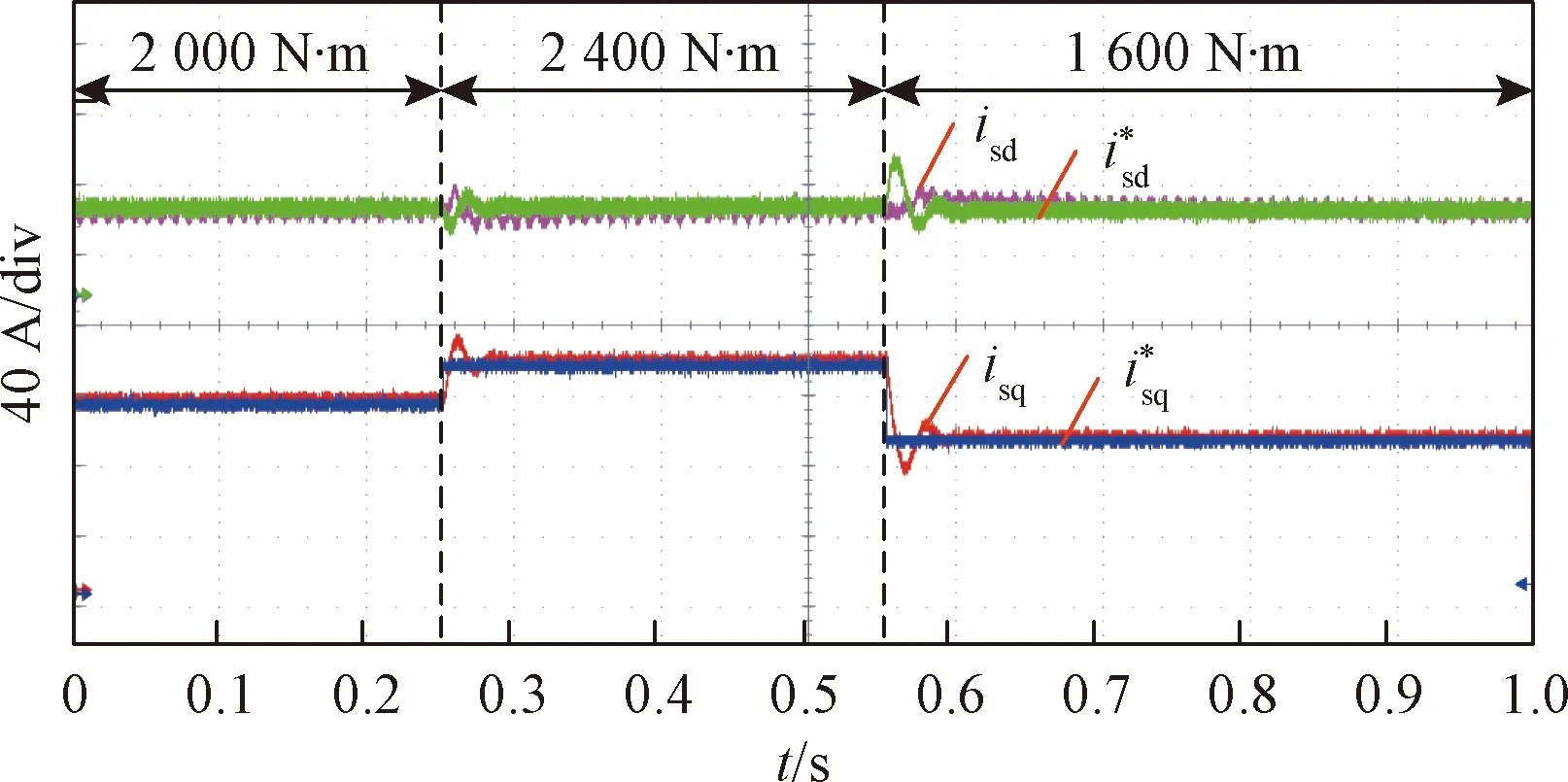
圖16 方波工況轉矩指令突變時d、q軸電流響應
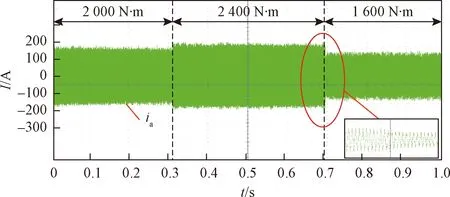
圖17 方波工況轉矩指令突變時相電流波形響應
4 結論
本文針對大功率高速列車牽引傳動系統,分析了牽引電機在方波工況下的轉矩輸出與電流、電壓限制的關系,根據電機數學模型得到了isd-isq坐標下最大轉矩輸出時最優電流矢量軌跡,并基于此提出了一種適合于方波的單環弱磁控制策略,并在CRH5型車電機控制實驗平臺完成了實驗驗證。本文主要得到如下結論:
(1)在方波工況下,電機定子電壓的幅值不變,傳統矢量控制不再適合方波工況。
(2)本文所提控制策略完全滿足于方波工況電機限制條件,且在進出方波時沒有沖擊,可實現平滑過渡。
(3)相比于傳統的反比例弱磁控制策略,采用本文所提的單環弱磁控制策略,電機轉矩輸出提升6.5%。
(4)本文所提弱磁控制在電機轉矩指令突變時,電機d、q軸電流跟蹤響應快速,保證了電機輸出轉矩準確而快速跟蹤轉矩指令。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36