高速列車牽引傳動系統機電耦合振動及其影響因素分析
2019-11-08 08:05:54趙心穎楊中平李翔飛張志強焦京海
鐵道學報 2019年10期
趙心穎,楊中平,林 飛,李翔飛,張志強,焦京海
(1.北京交通大學 電氣工程學院,北京 100044;2.中車青島四方機車車輛股份有限公司,青島 266000)
在高速列車運行過程中,牽引傳動系統電氣部分將把接觸網傳遞過來的單相交流電,轉換為適合牽引電機的可變頻率和幅值的三相交流電,從而驅動電機轉動,而機械部分是負責將電機轉矩通過齒輪箱、聯軸節等彈性環節傳遞到輪對,最終牽引列車穩定運行[1]。
高速列車傳動裝置工作環境惡劣,工作時會承受較大的沖擊。在運行過程中,各個部件會因為彈性形變而產生不同程度的瞬時轉速起伏,形成沿旋轉方向的來回扭動,從而產生軸系扭轉振動。在高速列車運行過程中,各部件振動等現象普遍存在,會增加軸的疲勞損傷,降低其使用壽命[2-4]。
目前,僅從機械結構和輪軌耦合兩方面對傳動裝置振動進行研究[5-6],但隨著PWM逆變器的使用,電氣激勵對振動的影響也逐漸受到了關注。荷蘭學者Winterling等[7-9]簡單分析了電機的諧波轉矩特性以及兩者的耦合關系,但未進行實驗驗證。文獻[10-11]建立了轉向架和車體系統模型,研究了電機轉矩脈動作用下的架懸式驅動裝置振動。文獻[12-13] 用雙慣量模型對電機-負載系統進行建模,發現負荷沖擊或者階躍輸入會造成系統產生固有頻率下的振動。但大多數對于電氣控制和振動機理方面的研究較淺,并且沒有考慮驅動裝置各部件的振動情況。
為了便于分析,通常將軸系振動分成彎曲振動和扭轉振動,彎曲振動的表現形式是垂向和橫向振動,而扭轉振動主要是角速度和角加速度的波動。實際上二者是相互耦合的[14-15],對扭轉-彎曲振動之間的耦合關系進行深入研究是研究機電耦合振動必不可少的一環。
本文從電氣與機械耦合關系出發,建立了高速列車傳動系統模型,從諧振頻率和根軌跡的角度解釋了產生機電耦合振動的根源,對機電耦合振動現象及電氣量影響作用進行了深入分析,將系統的電氣振蕩轉化為機械振動,且進行了仿真和實驗驗證。
1 牽引傳動系統扭轉振動分析
1.1 雙慣量模型
為了對傳動系統穩定性進行深入分析,本節首先將機械結構簡化為主動和從動裝置結構組成的雙慣量模型,如圖1所示[16]。
電機轉矩Tm作為輸入激勵,根據胡克定律和力學分析可建立驅動微分方程組[17]

(1)
式中:Jm、Jl為電機側、負載側轉動慣量;C為阻尼系數;K為扭轉剛度;θm、θl分別為主動、從動裝置的角位移;Tl為負載轉矩。
對式(1)進行拉普拉斯變換,可得雙慣量系統傳遞函數模型為

(2)

(3)
式中:ωp、ωz為諧振、抗諧振頻率;ξp、ξz為諧振、抗諧振阻尼。
電機輸出轉速、負載轉速與電機轉矩的傳遞函數如圖2所示,其由慣性環節和二階振蕩環節組成,二階振蕩環節在復平面中引入了一對共軛復根極點,頻率值為ωp。
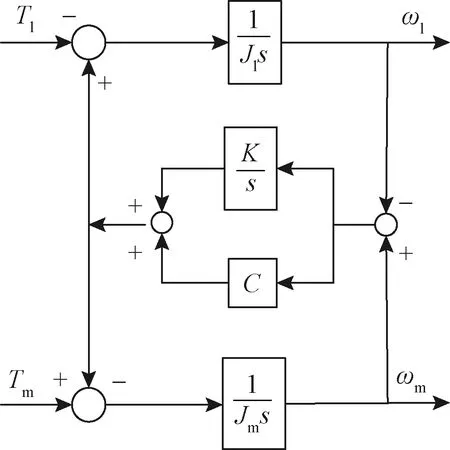
圖2 雙慣量系統傳遞函數模型
阻尼系數ξp一般很小,因此可以忽略。由圖3所示波特圖可得,該模型存在一個諧振頻率點和一個抗諧振頻率點。諧振頻率主要由剛度K和轉動慣量Jl決定:K越大,ωp越大;Jl越大,ωp越小。
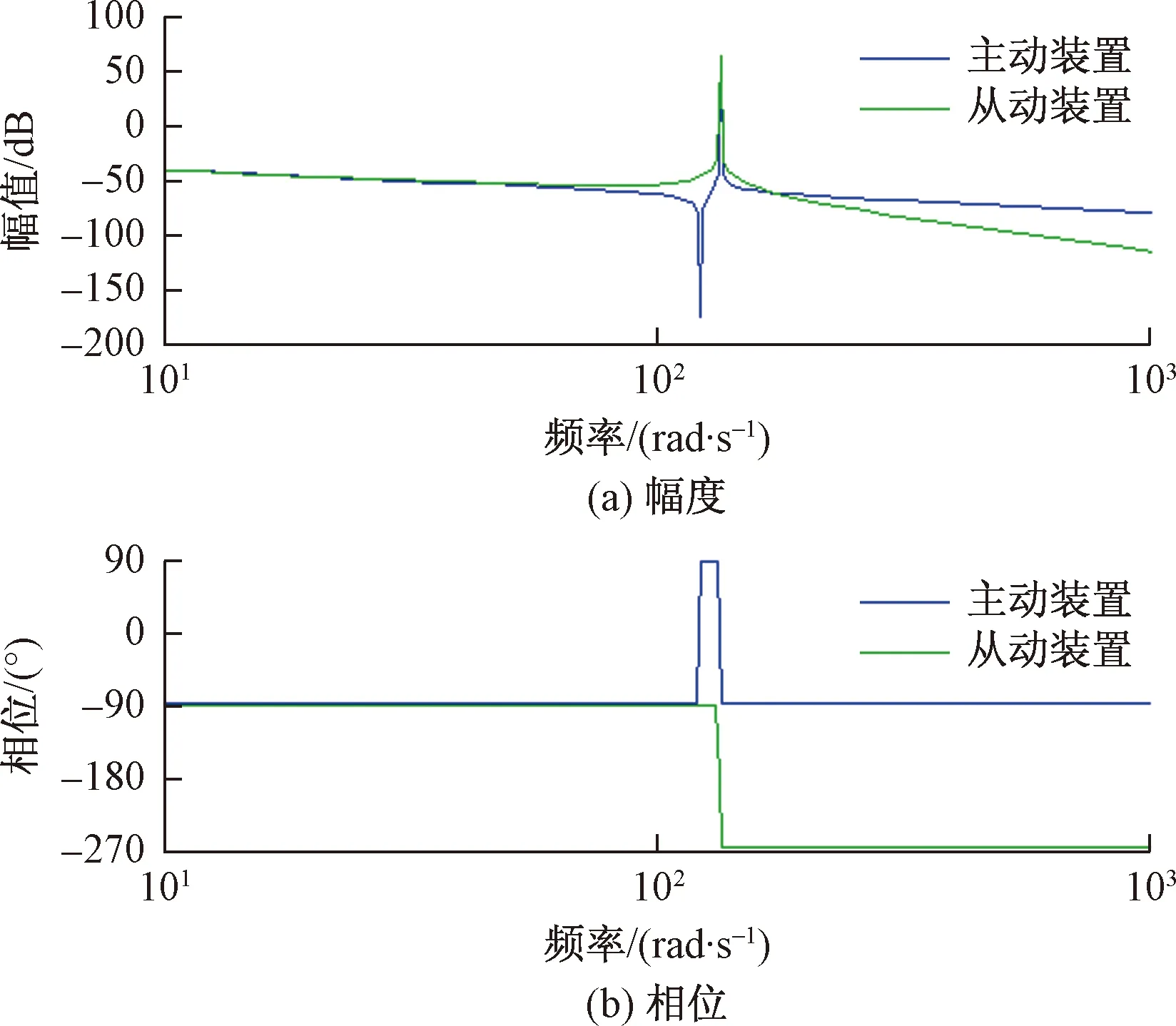
圖3 雙慣量波特圖分析結果
式(2)對應的傳遞函數系統增益在諧振頻率點(約21.3 Hz)處急劇增加,而式(3)中負載轉速相位在諧振點處也會發生大幅度變化。若系統帶寬包含諧振頻率,外界干擾可能會導致驅動裝置產生振動。
1.2 系統穩定性分析
高速列車牽引傳動系統實際采用電機矢量控制,其電流環響應速度很快,因此可將電流環簡化成時間常數為τ的一階慣性環節,包含機電耦合因素的控制框圖見圖4。
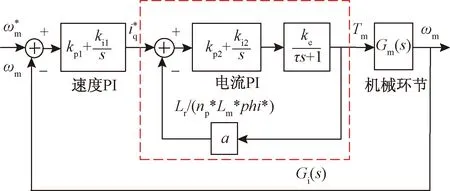
圖4 牽引傳動系統理論模型
系統開環傳遞函數為G(s),由機械結構Gm(s)、電能變換環節G1(s)和速度調節3個部分組成,即

(4)

系統共存在6個極點和4個零點,為研究系統參數影響度和穩定性,將傳遞函數化為標準形式
( 5)
繪制根軌跡,見圖5。根據圖5可得,G1(s)對應一個遠離坐標原點的負實軸極點,Gm(s)則對應共軛復數根零點和極點,將其放大,如圖6所示,根軌跡起始于開環極點,終止于開環零點。
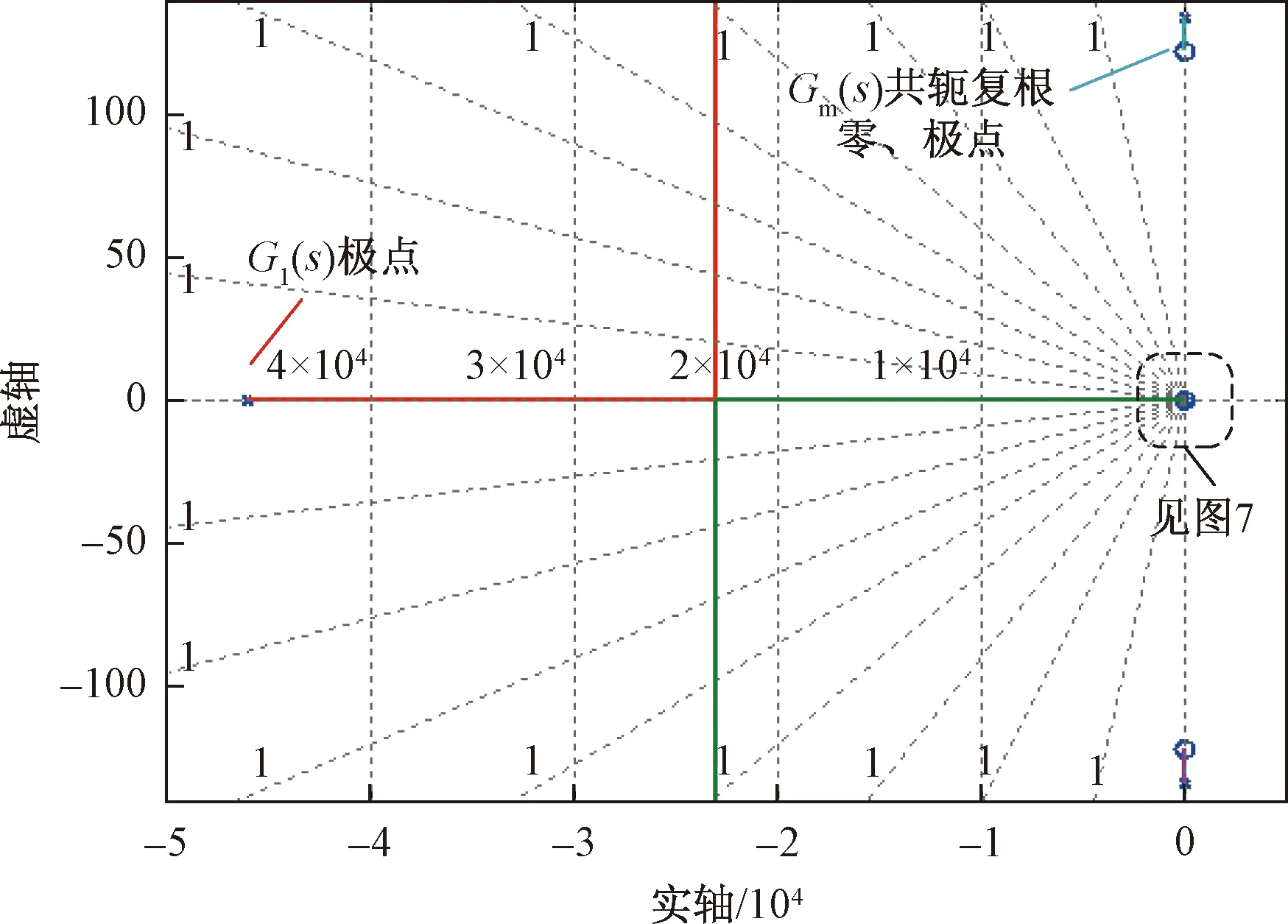
圖5 系統根軌跡
傳動系統存在一對欠阻尼的共軛復數極點,,其振動形式是衰減的正弦振蕩,頻率為ωp。
將圖5中實軸附近根軌跡放大,如圖7所示。
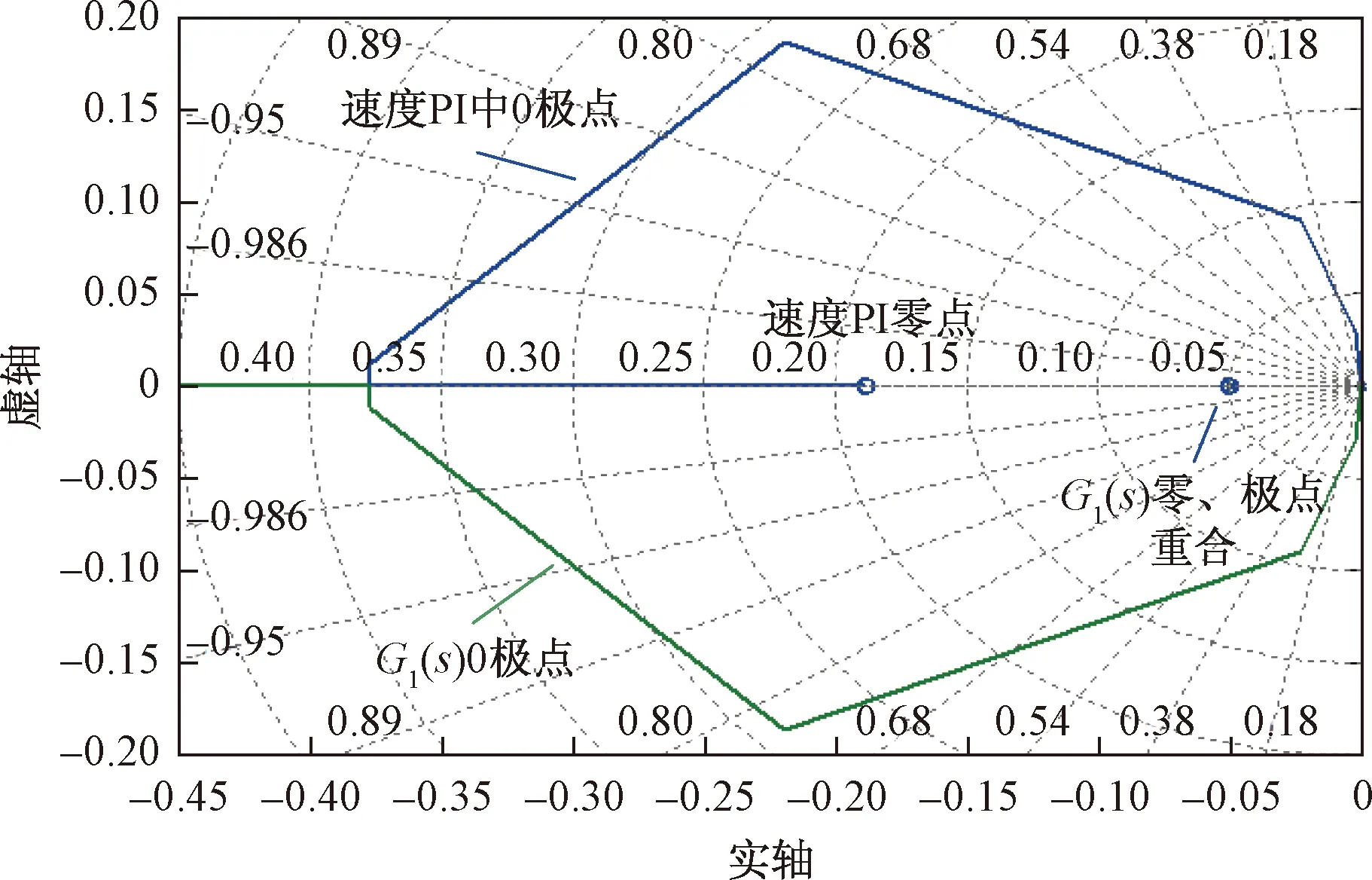
圖7 系統部分根軌跡
G1(s)帶來的兩個極點中,一個遠離虛軸(圖5),另一個與零點-ki2/kp2重合,因此G1(s)中的兩個極點在之后的分析中忽略不計。而速度調節器存在一個0極點和一個零點為(-ki1/kp1,0),速度PI帶來的開環極點0,以該零點為終點形成根軌跡,而G1(s)帶來的0極點與圖5中遠離虛軸的負實數零點重合然后朝著實軸正、負方向移動。
由此可得,該系統的穩定性主要與機械環節所對應的3個極點和速度調節器對應的1個極點的根軌跡相關。
根據對Kg影響參數的分析,系統穩定性主要跟速度PI參數kp1、電流PI參數kp2、電機轉動慣量Jm相關,而在實際列車中,電機轉動慣量是固定的,負載轉動慣量Jl會發生變化,因此本文主要觀察kp1、kp2、Jl對系統穩定性的影響情況,見圖8。隨著速度環kp1(圖8中)(由8依次遞減至5)或電流環kp2(圖9中)的減小(由100依次遞減至70),ωp不變,共軛極點向右平移,其主導地位更強,系統穩定裕度變低,根據參數的變化規律,相比kp2而言,kp1對系統穩定性的影響作用更大。
同理,由圖10可得,隨著Jl的減小,ωp變大,共軛極點靠近虛軸,穩定裕度越低。

圖8 kp1變化零極點影響圖
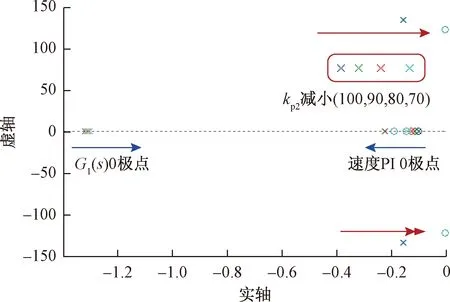
圖9 kp2變化零極點影響圖
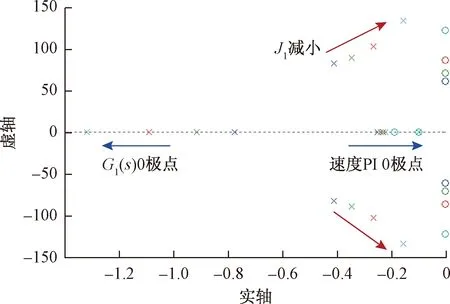
圖10 Jl變化零極點影響圖
1.3 機電耦合仿真分析
本文在MATLAB的Simulink上搭建了牽引傳動系統模型,該模型采用CRH2A動車組實際參數模擬列車運行狀況,其中逆變器直流側輸入電壓額定值為3 000 V,電流額定值為432 A,異步電機控制選用矢量控制方式。
設置負載轉矩為500 N·m,系統轉速指令100 km/h,0~4 s加速過程相當于轉速指令階躍過程,當速度穩定后,第6 s設置負載轉矩階躍從500 N·m減小到100 N·m。

圖11 電機轉速及轉矩仿真波形
轉速和轉矩都出現了明顯的弱阻尼諧振現象,見圖11,諧振頻率為21.3 Hz,振動時間約為0.5 s。
電機和負載的轉速偏差是反映機電耦合振動的重要參數。研究扭轉振動現象的同時,對比不同電氣參數kp1、kp2和機械參數Jl對扭轉振動的影響如圖12、圖13所示。
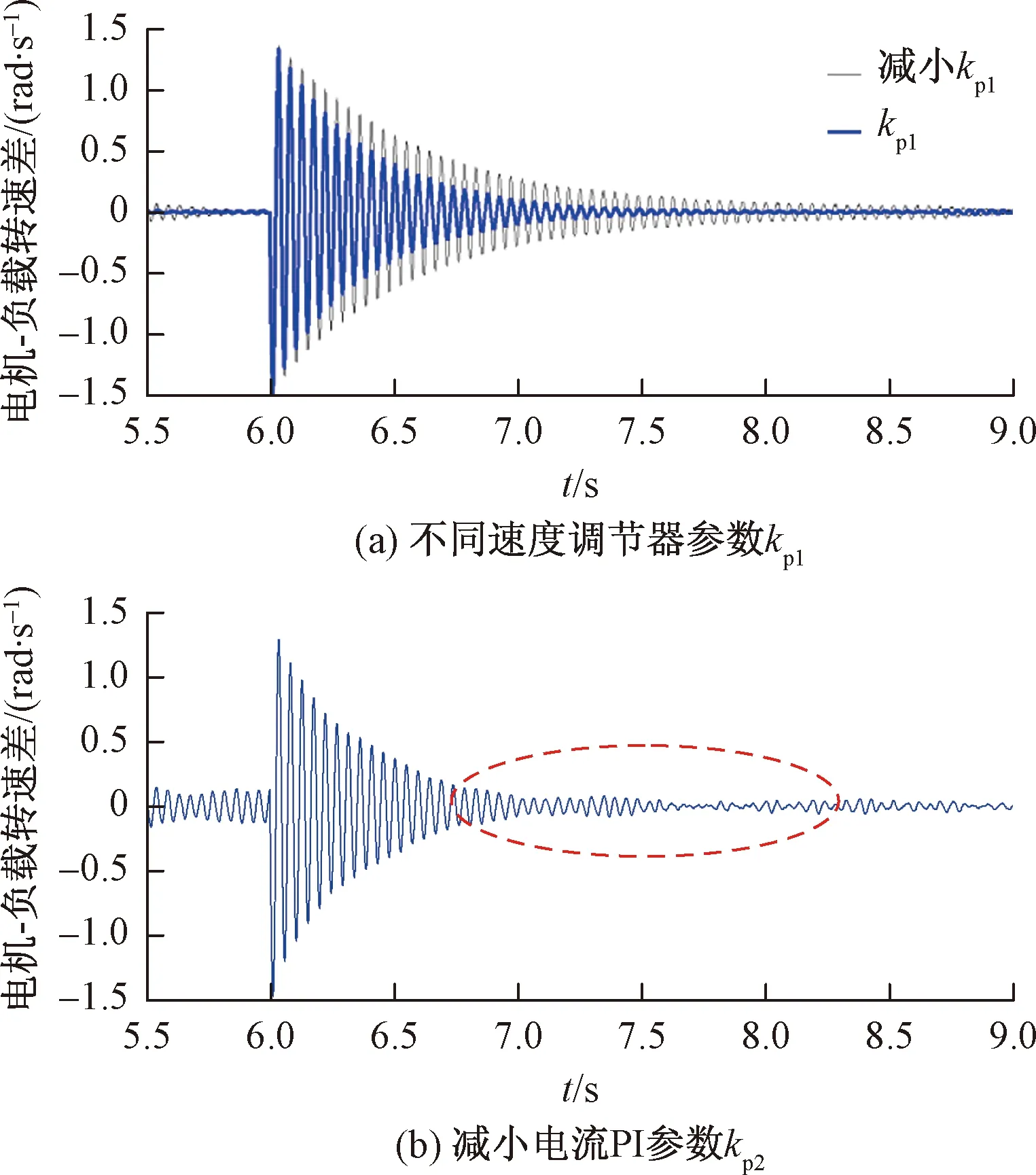
圖12 電機-負載轉速差
由圖12(a)可得,速度環kp1值減小25%,系統振動加劇,持續時間變長。圖12(b)中,電流環調節參數kp2減小的影響較小,但其仍會使穩定性變差。
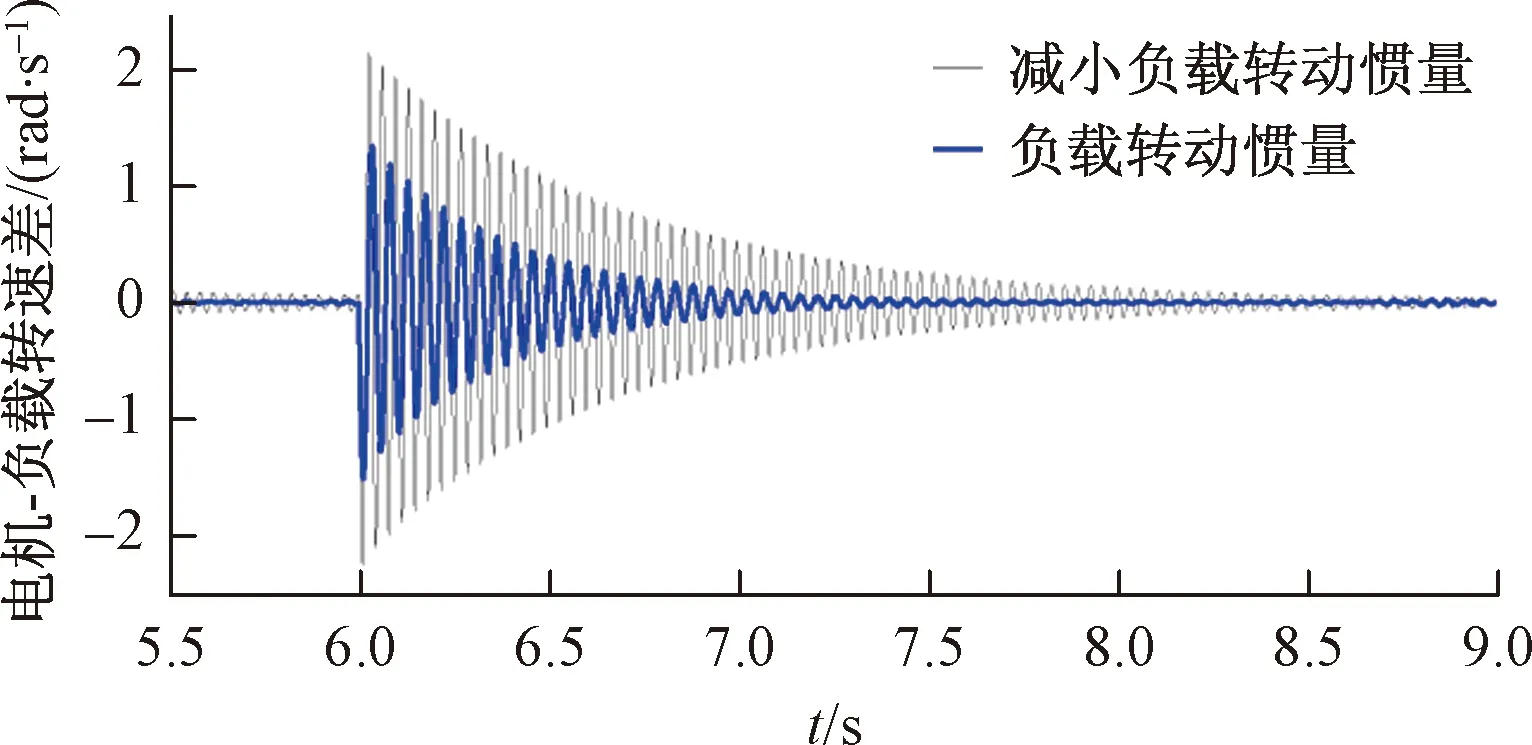
圖13 不同負載轉動慣量Jl時轉速差對比
設置Jl減小25%,振動持續時間和轉速差振幅均會增大,穩定性變差;而結合1.1節分析同樣可得隨著剛度K的減小,振動更嚴重。
綜上,當系統存在不穩定因素時,會造成機械系統電機-負載轉速差、轉角差、轉速轉矩振動等現象,在電氣控制系統中體現為速度調節器輸出振蕩、輸出電流振蕩等,影響扭轉振動強弱的電氣參數主要是速度控制器參數kp1,機械參數Jl對扭轉振動也有一定的影響。
2 牽引傳動系統扭轉-彎曲耦合振動分析
第1節將機械環節簡化成電機-負載雙慣量模型,對傳動系統穩定性和參數影響度進行了分析。在實測過程中,各個裝置橫向、縱向和垂向振動的測量反映的是系統的彎曲振動特性。因此本節進一步建立了考慮齒輪箱彈性懸掛的扭轉-彎曲振動模型,將系統的電氣振蕩轉化為機械振動,通過理論建模和機電耦合仿真對聯軸節、齒輪箱和車輪各個裝置的振動進行分析,同時驗證電氣參數對振動的影響作用。
2.1 扭轉-彎曲耦合振動模型
高速列車驅動裝置主要包括電機、聯軸節、齒輪箱、車軸、輪對以及懸掛裝置等部分,如圖14所示[18]。
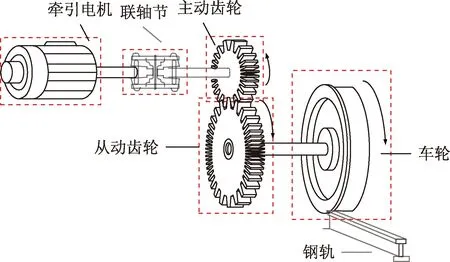
圖14 轉向架驅動裝置結構劃分

以CRH2A型車架懸式牽引傳動系統結構為例,通過合理的簡化,可將圖14所示的結構等效為如圖16所示[20]的模型。圖16中各部分參數的含義見表1。
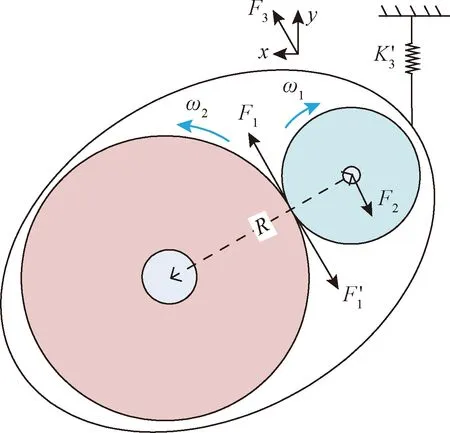
圖15 齒輪箱截面示意圖

圖16 考慮扭轉-彎曲耦合振動模型
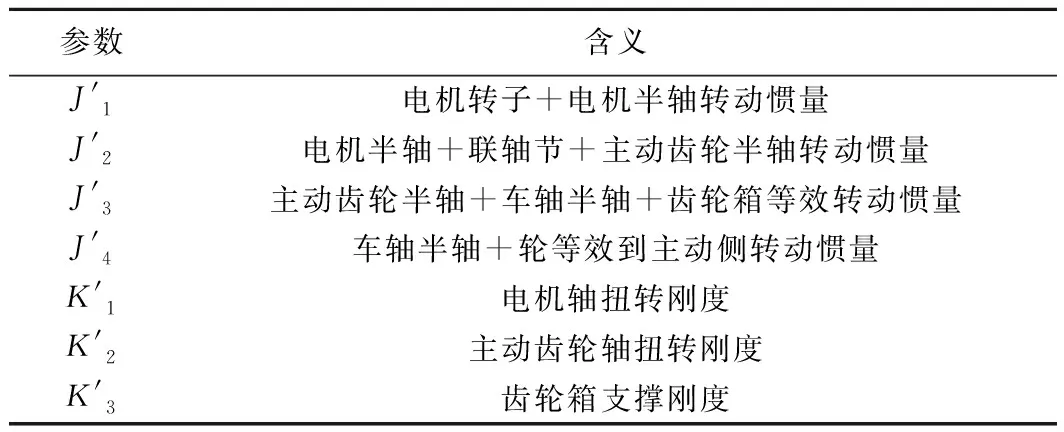
參數含義J'1電機轉子+電機半軸轉動慣量J'2電機半軸+聯軸節+主動齒輪半軸轉動慣量J'3主動齒輪半軸+車軸半軸+齒輪箱等效轉動慣量J'4車軸半軸+輪等效到主動側轉動慣量K'1電機軸扭轉剛度K'2主動齒輪軸扭轉剛度K'3齒輪箱支撐剛度
設θ1、θ2、θ3、θ4和θ5分別為電機轉子、聯軸節、小齒輪、齒輪箱以及車輪和大齒輪轉動的角度,齒輪傳動比為n,則可用大齒輪和齒輪箱的角速度表示小齒輪的角速度波動情況,即

(6)
選取各部位的轉動角度為狀態變量,系統狀態方程表達式為
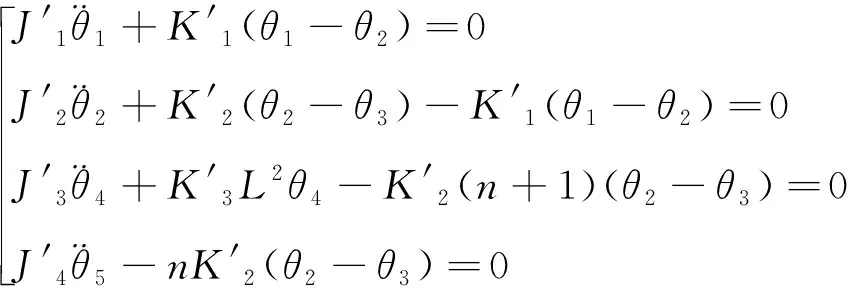
(7)
將式(6)代入式(7)可得扭轉-彎曲振動模型,然后將該機械模型加入到圖4所示的傳動系統電機控制模型中,可得系統幅頻特性如圖17所示。計算耦合振動的固有頻率,其頻率值見表2。

圖17 扭轉-彎曲振動模型波特圖
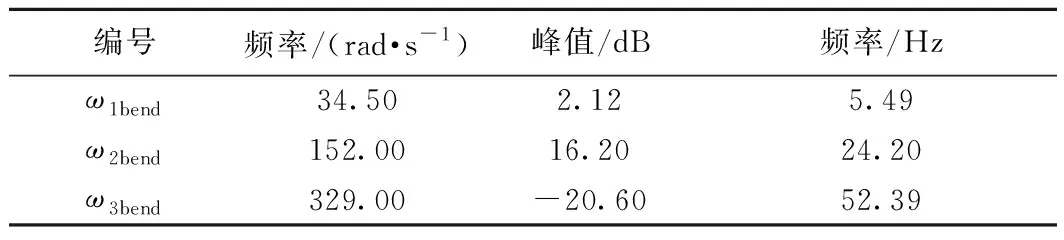
編號頻率/(rad·s-1)峰值/dB頻率/Hzω1bend34.502.125.49ω2bend152.0016.2024.20ω3bend329.00-20.6052.39
由結果可發現,加入扭轉-彎曲振動模型后,速度控制系統存在3個諧振頻率點,其中以ω2bend=24.2 Hz對應的諧振峰值最高,與雙慣量系統中諧振頻率21.3 Hz接近,ω1bend次之,ω3bend=52.39 Hz對應的諧振峰值為負,該頻率的振動分量很弱。
2.2 機電耦合仿真分析
設置仿真條件與2.1節相同,在速度達到穩定時刻(約14 s時),電機轉矩出現頻率約為24 Hz的脈動,如圖18所示。
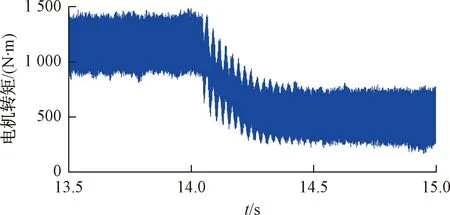
圖18 電機轉矩波形
當速度達到穩定(20 s時),令負載轉矩發生階躍,同時調節kp1,觀察驅動裝置各個組成裝置的角加速度見圖19。
由圖19振動結果可得,軸系各個裝置在外界產生擾動等不穩定情況下時,都產生了不同程度的振動。其中振動最強烈的是齒輪箱,次之是車輪,然后是聯軸節。3者的角加速度振動幅值分別為25、12、3 rad/s2。
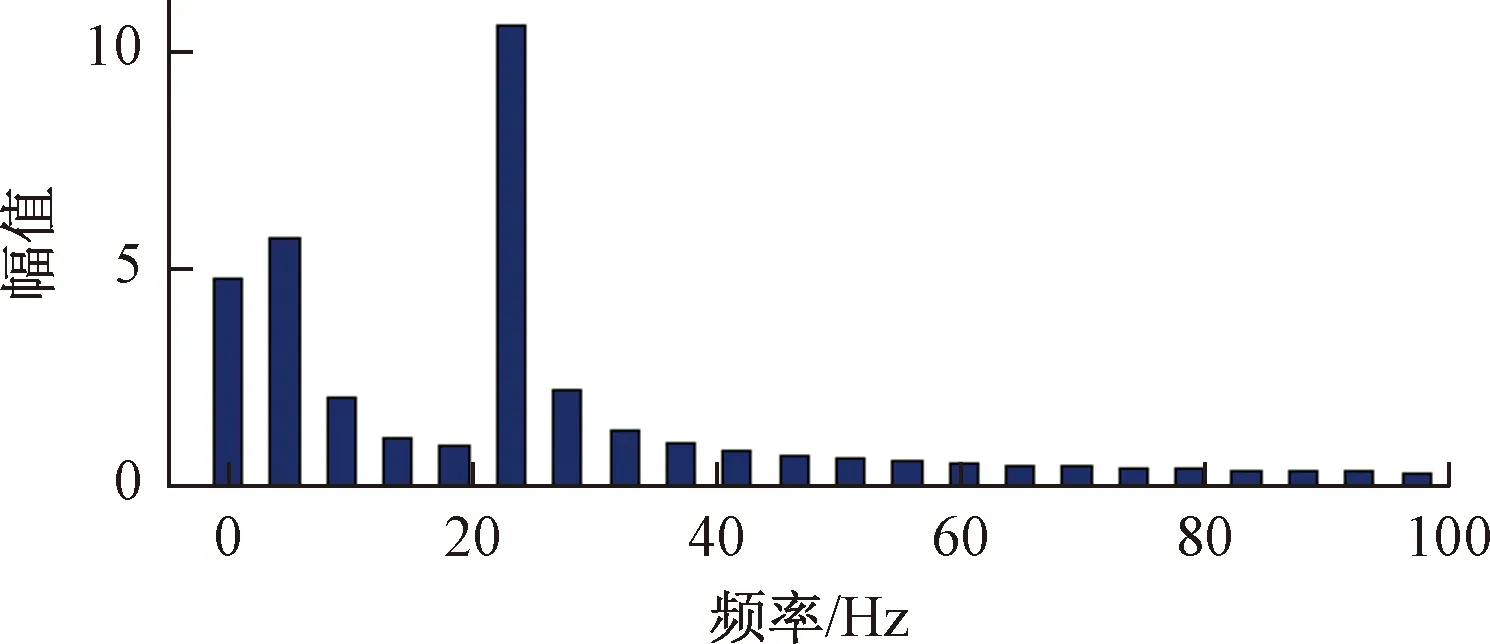
圖20 角加速度FFT分析
由圖20可知,振動頻譜中主要包含兩個諧振頻率,其中約24 Hz的頻率分量最高,約5 Hz的頻率分量次之,與表2中的結果一致。
同時,由圖19可得,設置kp1減小25%時,各個部件的振動都有所加劇,聯軸節振動角加速度幅值增加了約4 rad/s2,齒輪箱約2.5 rad/s2,車輪約2 rad/s2,穩定性變差。
調節電流環參數kp2的大小,但其對振動影響非常微弱,以齒輪箱為例,設置kp2減小25%時的角加速度對比結果如圖21所示。
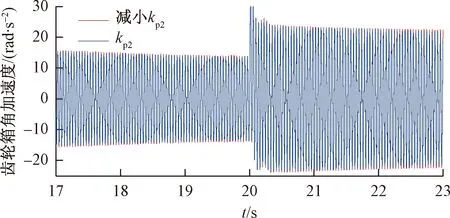
圖21 調節kp2時齒輪箱角加速度對比
3 實驗結果及分析
在實驗室設計搭建了1.1 kW小功率機電耦合振動實驗平臺,主電路圖如圖22所示,兩臺逆變器分別驅動兩臺異步電機。兩電機中間加入齒輪傳動裝置,并在齒輪傳動裝置的垂向加裝振動加速度傳感器,用于測量其振動狀態。在齒輪箱和臺架中加裝了10 mm厚的彈性材料(橡膠)。
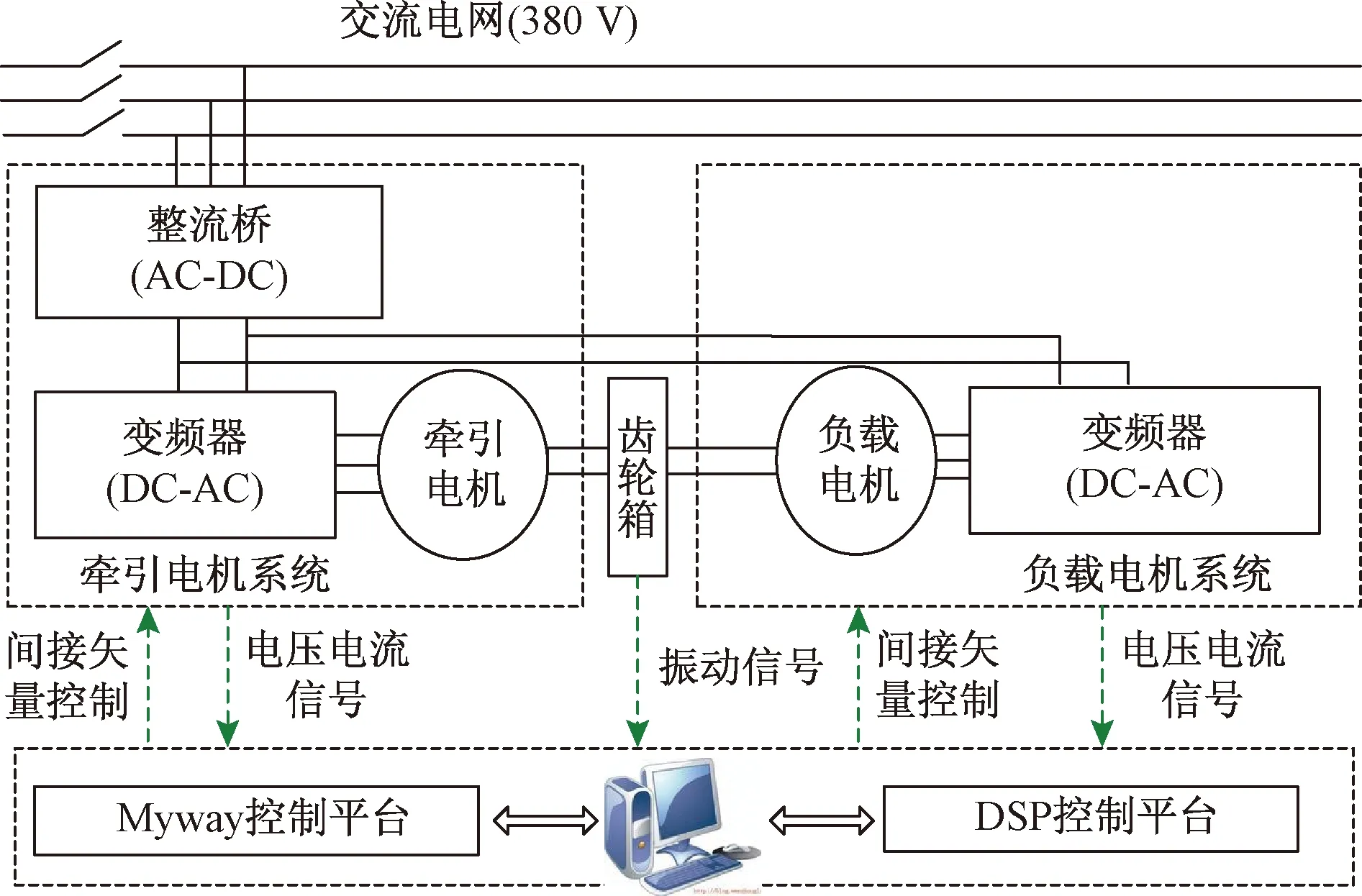
圖22 實驗平臺搭建框圖
由于齒輪箱的傳動比為4∶3,在牽引側選用4極電機,負載側采用6極電機,電機和齒輪箱的連接采用梅花形聯軸節,見圖23。

圖23 實驗裝置圖
設置轉速指令在第30 s時由200 rad/min速階躍至800 rad/min,負載轉矩為5 N·m,振動加速度波形如圖24所示,振動加速度有明顯增加,對其進行短時傅里葉分析,振動頻譜分析如圖25所示。
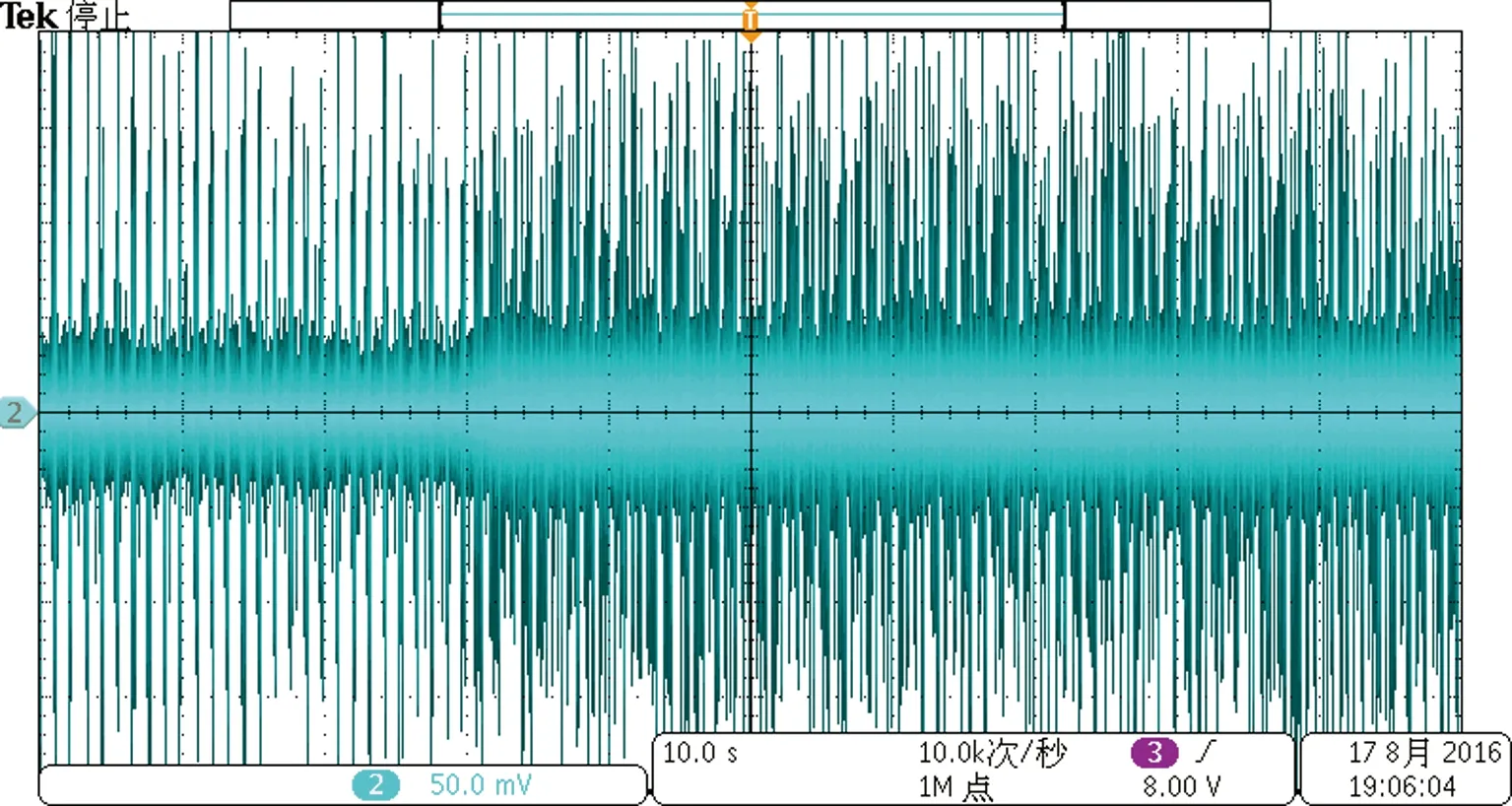
圖24 振動加速度波形
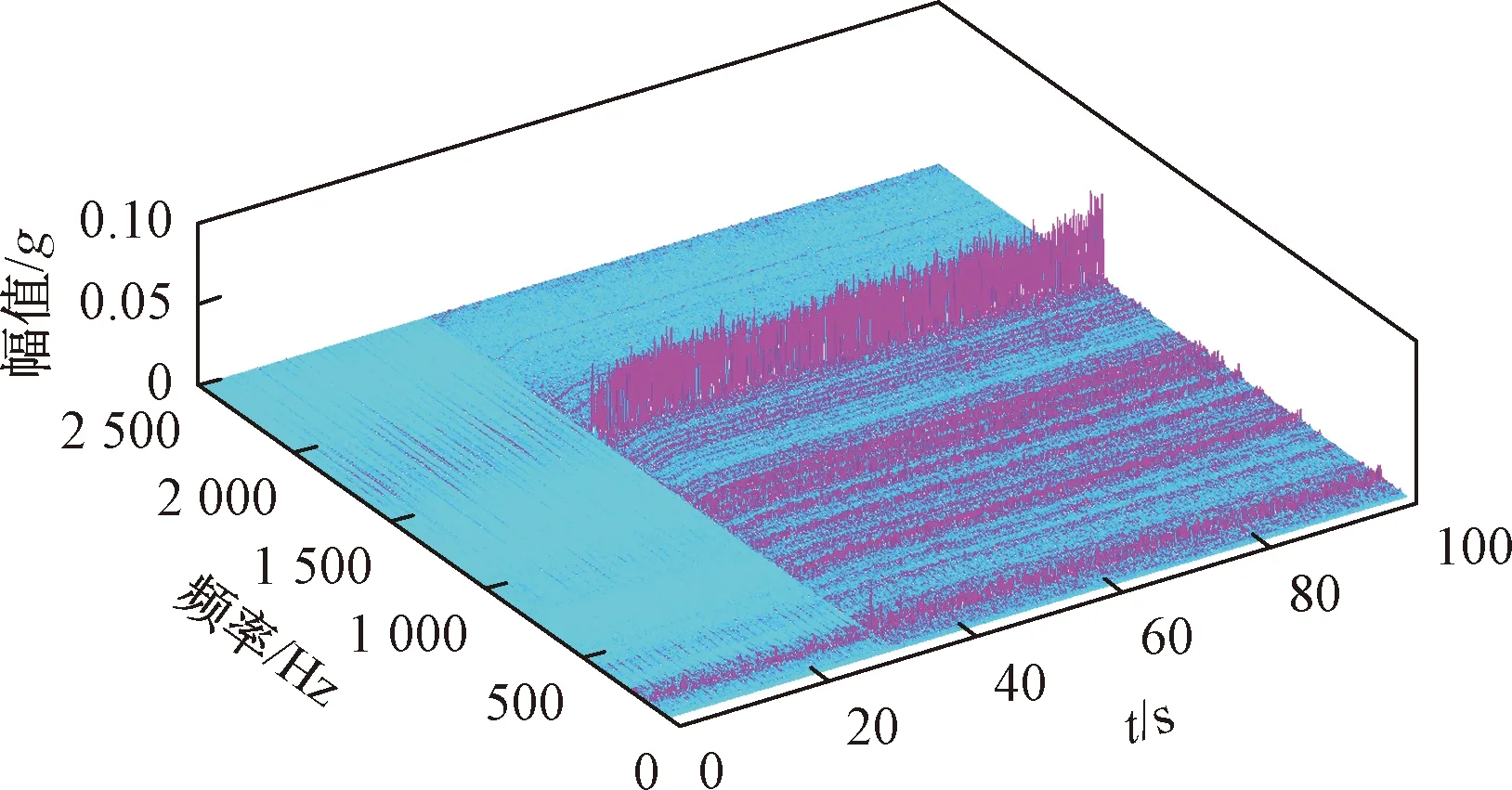
圖25 齒輪箱振動頻譜分析
由圖25可得,系統存在一個不隨速度變化的固有頻率,即為裝置諧振頻率,約為180 Hz。提取180 Hz附近的頻譜結果,觀察該頻率對應的幅值變化,如圖26所示。
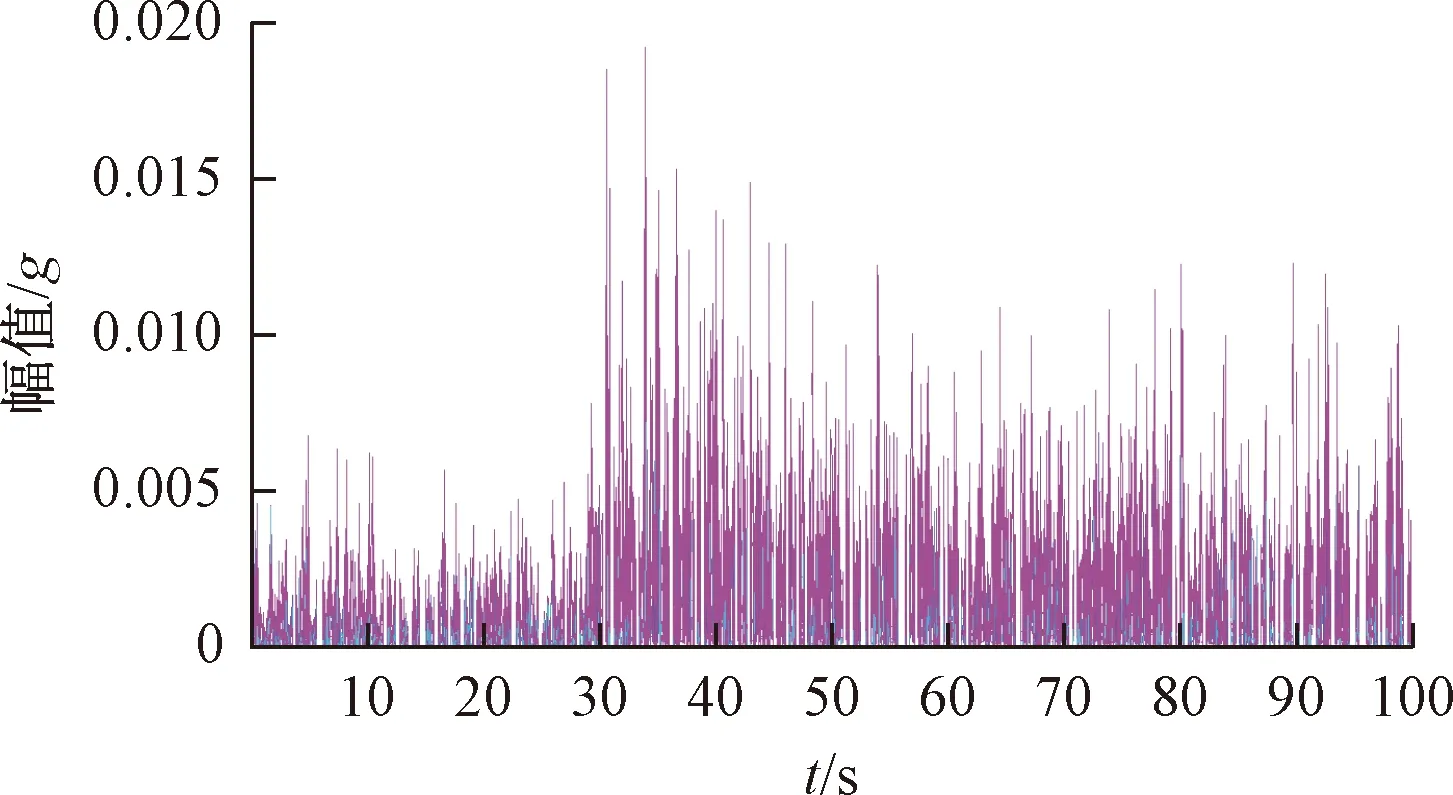
圖26 180 Hz附近振動頻譜(kp1=0.02)
由圖26可得,當系統產生階躍時,諧振頻率的振動明顯加劇,振動峰值增加至了0.019 1g,在第35 s到50 s時,振動峰值由前30 s的0.006 8g增加至了0.015 9g,增加了1.34倍,之后振動加速度緩慢減弱,保持在0.012 3g左右,現象與理論仿真分析一致。
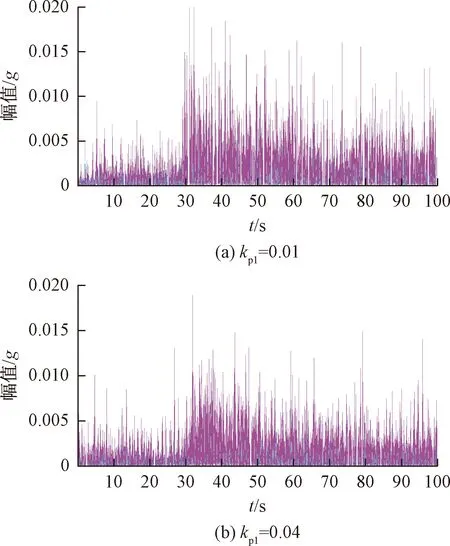
圖27 調節kp1時180 Hz附近振動頻譜
調節速度環參數kp1的大小,各振動峰值對比結果如圖27和表3所示。

表3 不同參數振動幅值對比
如圖27(a)所示,減小kp1=0.01時,在30 s時的振動峰值,約為0.02g,相比kp1=0.02時的振動峰值增加了15.72%,而50~70 s時增加了32.52%;而kp1增加至0.04,振動有明顯的衰弱,振動峰值較kp1=0.02時衰減了5.66%,之后大部分時間均低于0.01g。由此可得,kp1減小則齒輪箱振動越劇烈,振動衰減越緩慢。
4 結論
本文主要針對于高速列車傳動系統機電耦合振動進行了分析。建立了傳動系統振動模型,對其振動現象和參數影響度進行了分析,本文主要得到以下結論:
(1)機械結構產生的一對共軛極點是造成傳動系統扭轉振動的根源。轉速、負載擾動等會造成系統出現諧振頻率分量的振動。
(2)考慮齒輪箱彈性懸掛建立了CRH2A動車組傳動系統模型,系統主要存在3個諧振頻率,其中以齒輪箱的振動情況最為劇烈,振動頻率主要約為24.2 Hz,5.49 Hz分量次之。
(3)影響振動的電氣參數主要是速度控制器參數kp1、電流PI參數kp2。kp1或kp2越小,系統穩定性變差,振動更劇烈,其中kp1影響作用最大,kp2影響比較微弱。
(4)在1.1 kW小功率機電耦合振動實驗平臺上模擬再現了機電耦合振動現象,齒輪箱上測得的180 Hz的諧振頻率分量最為明顯,當電機轉速指令發生階躍時,齒輪裝置會產生劇烈的振動,其諧振頻率的振動分量加倍。另外,速度調節參數kp1越小,振動越劇烈,與理論、仿真結果一致。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03