粵西高密度山區(qū)DEM生產(chǎn)中機(jī)載LIDAR點(diǎn)云數(shù)據(jù)處理方法研究
2019-11-08 09:18:56崔珍珍周碧蓮
資源信息與工程 2019年5期
關(guān)鍵詞:方法
崔珍珍, 孟 蕾, 周碧蓮
(廣東省國土資源技術(shù)中心,廣東 廣州 510075)
1 引言
粵西地區(qū)人口密度稀疏,山脈、水庫、水田豐富,存在大片樹林等多層次且高密度植被覆蓋區(qū)域,給現(xiàn)有的地形測繪方法帶來嚴(yán)峻挑戰(zhàn)。采用GPS等常規(guī)地面測量方法,存在難以到達(dá)、施測困難、電子信號屏蔽等問題。近幾年,隨著機(jī)載激光雷達(dá)硬件系統(tǒng)的快速發(fā)展,其產(chǎn)生的點(diǎn)云數(shù)據(jù)也變得更加精確且數(shù)據(jù)海量,成為生產(chǎn)DEM很好的數(shù)據(jù)源。LIDAR系統(tǒng)采集的三維點(diǎn)云數(shù)據(jù)中存在大量的非地面反射點(diǎn),因此無法直接獲取測區(qū)高精度數(shù)字高程模型,所以需要通過濾波解決這個(gè)問題。根據(jù)濾波的發(fā)展方向,主流濾波算法分為三類:一是基于三維空間信息的方法,如自適應(yīng)三角網(wǎng)法(ATIN)、多尺度曲率法(MCC)、數(shù)學(xué)漸進(jìn)形態(tài)法(PM)、坡度分析法等;二是基于回波強(qiáng)度的分類方法;三是基于點(diǎn)云與影像融合的方法。在機(jī)載激光雷達(dá)點(diǎn)云數(shù)據(jù)的處理研究中,研究人員已經(jīng)開發(fā)了許多濾波算法,但是在對場景比較復(fù)雜的點(diǎn)云數(shù)據(jù)處理時(shí),這些濾波算法依然存在一些不足,這時(shí)需要人工干預(yù)進(jìn)行手動濾波。在進(jìn)行實(shí)際生產(chǎn)時(shí),需要根據(jù)測區(qū)實(shí)際情況,找到一種效果較好的濾波方法。本文在對多測區(qū)山地地形地貌進(jìn)行分析測試的基礎(chǔ)上,提出一種多組合重迭代地面點(diǎn)云濾波算法,即融合形態(tài)學(xué)與自適應(yīng)三角網(wǎng)濾波并結(jié)合山脈山谷山脊進(jìn)行分塊快速擬合濾波方法。
2 點(diǎn)云數(shù)據(jù)處理流程
DEM生產(chǎn)制作方法依賴于采用的數(shù)據(jù)源,以機(jī)載LIDAR點(diǎn)云數(shù)據(jù)為例,生產(chǎn)流程見圖1。
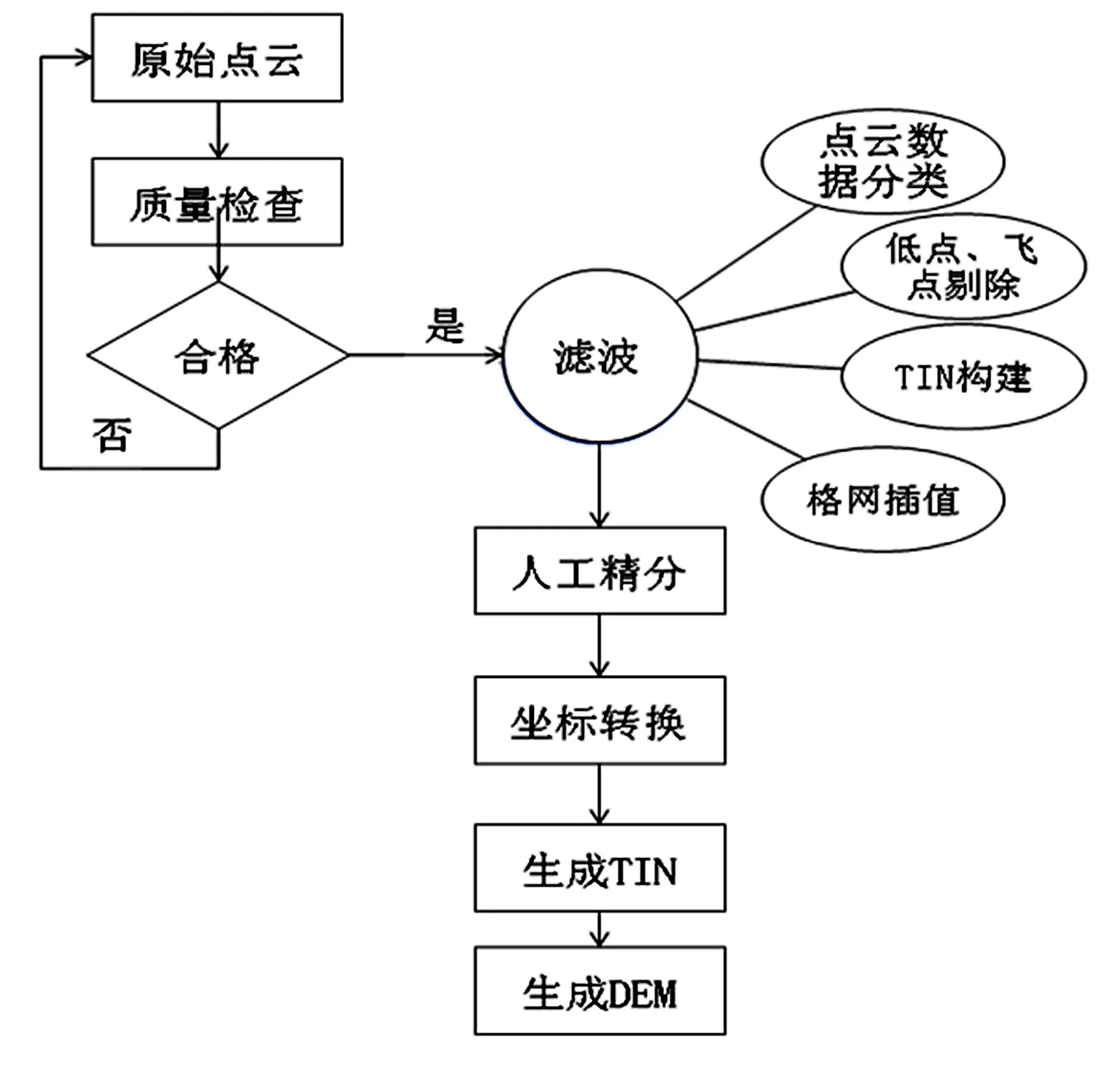
圖1 點(diǎn)云生產(chǎn)DEM流程圖
3 試驗(yàn)結(jié)果分析
3.1 實(shí)驗(yàn)數(shù)據(jù)
采取的數(shù)據(jù)為粵西地區(qū)38帶從化市某地區(qū)數(shù)據(jù),測試數(shù)據(jù)面積為450 m×390 m,單次回波703 184次,多次回波首次395 354次,多次回波末次395 221次。測區(qū)最小Z值220.750 m,最大為343.530 m。參考影像為國家第三次土地調(diào)查獲取的分辨率為1 m的高光譜遙感影像。影像顯示此測區(qū)由高密度林木遮擋,且山勢陡、山溝密度較大(見圖2)。

圖2 部分測區(qū)遙感影像示意圖
3.2 濾波方法
(1)漸進(jìn)三角網(wǎng)濾波方法。國內(nèi)常用MicroStation平臺上開發(fā)的Terrasolid軟件進(jìn)行濾波,其算法為Axelsson于2000年提出的一種基于不規(guī)則三角網(wǎng)(TIN)的漸進(jìn)加密,該方法先通過格網(wǎng)方式將測區(qū)的點(diǎn)云分塊,然后選取每個(gè)格網(wǎng)中的最低點(diǎn)作為初始種子點(diǎn),組成一個(gè)大的稀疏的TIN,再按照一定的距離和角度閾值判斷其他的點(diǎn),逐步加密得到一個(gè)最終的三角網(wǎng)模型。這種算法的適用性取決于參數(shù)的設(shè)置是否符合地形特點(diǎn),而合適的參數(shù)配置耗時(shí)較多,此算法對曲面不連續(xù)性的檢測較敏感,適用于城市區(qū)域的濾波。而對于本測區(qū)高密度山脈和高覆蓋度植被山體場景,在實(shí)際作業(yè)中往往需要花費(fèi)大量時(shí)間進(jìn)行參數(shù)調(diào)試。
(2)基于形態(tài)學(xué)濾波方法。這種濾波方法首先通過分析窗口內(nèi)水平分布的記錄點(diǎn),將其設(shè)為初始地面,設(shè)置一個(gè)閾值,并將所有與該地面在某一距離范圍內(nèi)的點(diǎn)都作為地面點(diǎn),然后采用自回歸過程檢驗(yàn)運(yùn)算結(jié)果,這種方法很容易擴(kuò)展成二維離散數(shù)據(jù)。
(3)本文采用的優(yōu)化濾波方法。本文使用TerraSolid濾波軟件,地形形態(tài)學(xué)法與漸進(jìn)三角網(wǎng)法相結(jié)合的局部濾波算法模塊工具進(jìn)行數(shù)據(jù)快速精分,對山谷、山脊、建筑區(qū)分類別進(jìn)行數(shù)據(jù)重濾波操作,實(shí)現(xiàn)山體結(jié)構(gòu)快速TIN重建。結(jié)合作圖經(jīng)驗(yàn),總結(jié)出一套適用于粵西高密度山脈復(fù)雜場景的處理流程,見圖3。
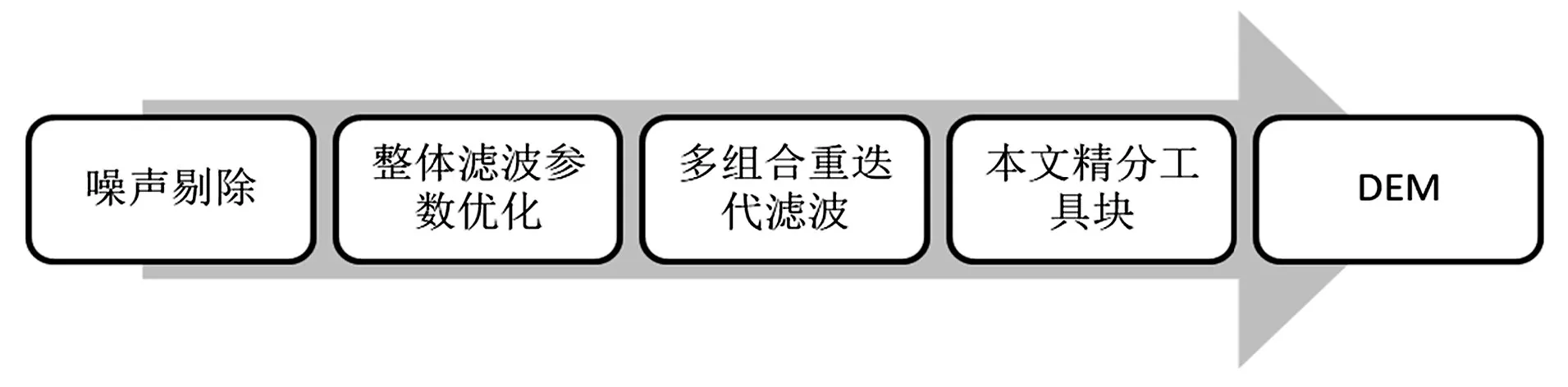
圖3 本文濾波方法生產(chǎn)DEM流程圖
本文采用融合形態(tài)學(xué)自適應(yīng)分塊擬合的方法進(jìn)行數(shù)據(jù)粗濾波,再結(jié)合地形特點(diǎn)開發(fā)出針對山谷和山脊兩種地形的局部地形恢復(fù)工具。山谷和山脊一般呈現(xiàn)倒銳角三角形和正銳角三角形特征,首先將山谷山脊的區(qū)域標(biāo)記出來,在選定山谷山脊地形范圍內(nèi)可以快速找到局部最低點(diǎn),設(shè)為臨時(shí)地面點(diǎn),再與已定坡面點(diǎn)構(gòu)造出銳角三角形,再在圈定距離與坡度范圍內(nèi)采用隨機(jī)適應(yīng)匹配原則,匹配出鄰域地面點(diǎn),逐步匹配直到區(qū)域內(nèi)所有點(diǎn)都被搜尋到。
3.3 數(shù)據(jù)驗(yàn)證
(1)濾波三角網(wǎng)效果對比。取粵西某部分?jǐn)?shù)據(jù),采用三種不同算法進(jìn)行濾波,構(gòu)造Delaunay三角網(wǎng),三者濾波后地形渲染效果對比如圖4。
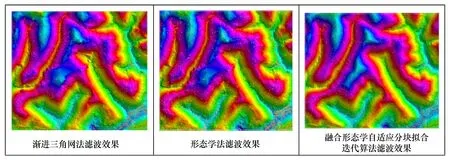
圖4 三者濾波后地形渲染效果對比圖
從上圖中可以明顯看出,基于形態(tài)學(xué)的濾波方法比單獨(dú)使用自適應(yīng)三角網(wǎng)法得到的山地地形好,具體表現(xiàn)為:在可以保持山形情況下,去除了較多噪點(diǎn)云集。多組合重迭代的濾波方法對于自然地形的恢復(fù)效果最佳,且濾波得到的地面點(diǎn)云密度也明顯比前兩個(gè)算法要大。
(2)DEM成果精度分析評價(jià)。DEM的高程誤差來源于三個(gè)方面:點(diǎn)云數(shù)據(jù)本身的高程(大地高)誤差;高程系統(tǒng)轉(zhuǎn)換的誤差,即似大地水準(zhǔn)面精化誤差;插值對DEM高程精度的影響。點(diǎn)云高程誤差主要通過外業(yè)打點(diǎn)來計(jì)算獲取。將擬合后的DEM與RTK外業(yè)實(shí)地采集點(diǎn)高程數(shù)據(jù)進(jìn)行精度檢測,分別計(jì)算三種數(shù)據(jù)的高差中誤差。經(jīng)計(jì)算,三種濾波方法得到的DEM與RTK采集點(diǎn)比較得到的Z值均方根誤差見表1。

表1 三種濾波方法得到的DEM與RTK精度比較
4 結(jié)論
(1)提出了融合形態(tài)學(xué)自適應(yīng)分塊擬合迭代濾波算法,成功解決了粵西部分山區(qū)高密度植被與山脈密集場景地形中植被點(diǎn)云智能化剝離難題,為高精度內(nèi)業(yè)生產(chǎn)提供良好的濾波基礎(chǔ)數(shù)據(jù),減少內(nèi)業(yè)作業(yè)時(shí)間,從而減少因作業(yè)員專業(yè)素質(zhì)導(dǎo)致的錯(cuò)分漏分。
(2)不同算法最佳適用的地形不同,研究顯示,針對不同地形特點(diǎn),采用針對性的濾波算法,可以有效分離出地面和非地面點(diǎn)。
(3)低空機(jī)載LIDAR技術(shù)應(yīng)用于粵西植被高覆蓋、高遮擋、高密度山區(qū)地形測繪,具有高精度、高效率、高自動化等顯著優(yōu)勢,革新現(xiàn)有的測繪手段。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56