多旋翼無人機動力系統的實現形式研究
2019-11-07 09:18:03周樂
無線互聯科技 2019年15期
周樂
摘? ?要:多旋翼無人機因其比傳統飛行器體積小、操控簡單、飛行成本低等優點,已經被廣泛應用于影視航拍、新聞媒體、交通管理、飛行表演、農業植保、電力巡線、測繪等領域。文章主要介紹了多旋翼無人機動力系統的幾種實現形式,通過內燃機、鋰電池、燃料電池鋰電池混合動力3種驅動形式的動力系統示意圖分別簡述其工作原理和優缺點。
關鍵詞:多旋翼無人機;動力系統;混合動力;燃料電池
1? ? 多旋翼無人機發展
自20世紀20年代出現多旋翼無人機以來,四旋翼無人機已有近90年的發展歷程[1],然而,由于多旋翼飛行器的飛行效率并不高,并且受到過去技術發展水平的限制,多旋翼無人機的穩定性設計非常差,容易受到氣流擾動和碰撞的影響,其有效載荷很小,并且由于當時有關人員沒有強調控制困難和缺乏實用性[2],缺乏設備組件的集成,機體太笨重。在21世紀,科學技術的發展,特別是高新技術的發展、算法控制的出現、傳感器的小型化等,使得多旋翼無人機再次受到人們的關注,越來越多國家的科研機構高等院校以及高新技術企業開始重視這一行業。
1.1? 國外多旋翼無人機發展歷史和研究現狀
為了成功實現飛行,許多國外工程師試圖在設計的多旋翼飛機上安置各種飛行動力。如早在20世紀20年代,法國C.Richet教授就設計了一架小的直升機,盡管結果不成功,但這一舉動卻激發了他的學生Breguet的興趣,1907年,Breguet兄弟開發出世界上第一臺36.7 kW內燃機驅動的“Breguet-Richet Gyroplane No.1”多旋翼飛機,1907年8月24日,在法國北部杜埃,“Breguet-RichetGyroplane No.1”號多旋翼飛機首次試飛,在試飛時,飛機高出地面0.61 m,徘徊了將近1 min[3-6]。
在小型多旋翼無人機的研究領域,由美國Draganflyer公司開發的名為“Draganflyer Ⅲ”的多旋翼無人機,其主體材料為高性能塑料和碳纖維復合材料,高度為18 cm,整機重481.1 g,旋翼直徑28 cm,整個無人機可負載113.2 g,驅動電池可以提供大約16~20 min的連續飛行,并且其4個電機轉速可以通過飛控設備來控制,“Draganflyer Ⅲ”還有3個陀螺儀來控制其姿態穩定[7],這可以提高整體飛行的穩定性。
雖然微型多旋翼無人機的研究取得了成果,國外對工業級多旋翼無人機和載人多旋翼飛行器的研究也在持續進行,例如,在德國,名為“E-vovo”的公司開發了一種名叫“VC200”的載人多旋翼飛機,它的機身主要由超輕碳纖維的復合材料制成,這種多旋翼飛機可以飛行約20 min[8]。
1.2? 國內多旋翼飛行器的發展與研究現狀
在消費級多旋翼無人機的開發過程中,東莞銀輝玩具有限公司開發了一種電動四旋翼無人機,該機的主體材料由聚丙烯塑料發泡材料制成,其機身長度為68.5 cm,高度為14 cm,該機的動力系統是一個電力驅動的系統[9]。
創立于2006年的大疆創新科技有限公司,是一家研發、生產、銷售多旋翼無人機的獨角獸企業,它的產品涵蓋了消費級多旋翼無人機、工業級多旋翼無人機以及無人機任務掛載設備。該公司發布的多類型多旋翼無人機已經廣泛應用于全球各地,例如DJI公司最近于2018年8月23號發布的“御”Mavic 2系列無人機,“御”Mavic 2系列多旋翼無人機屬于大疆航拍系列第5代消費級多旋翼無人機,該無人機裝配有專業相機,能實現8 km高清圖傳,具有左、右、上、下、前、后6個方向的避障飛行功能[10]。
2? ? 多旋翼無人機系統組成
無人機系統(Unmanned AeriaI System,UAS)由地面部分和空中部分組成。(1)地面部分,包含地面站、數傳電臺,圖傳電臺、遙控器。其中,地面站由指揮處理中心、無人機控制站、載荷控制站3部分組成。(2)空中部分,包含飛機和任務載荷[11],空中部分的飛機指多旋翼無人機,通過每個軸上的電動機或者內燃機旋轉驅動以產生向下的推力使多旋翼無人機垂直飛離地面,它是一種特殊的直升機。多旋翼無人機包括動力裝置、控制系統、機械部件、數據傳輸裝置、無人機任務載荷和遙控器。
2.1? 動力裝置
多旋翼無人機動力裝置的主要作用是為無人機的飛行提供動力,主要包括電動機或者內燃機、電子調速器、螺旋槳和電池4個部分[12]。(1)電動機或者內燃機,負責將電能或者化學能轉化為機械能,目前,多旋翼無人機的電動機以無刷直流電機為主,內燃機以四沖程發動機為主。(2)電子調速器,負責將飛行控制系統的控制信號快速轉變為電樞電壓和電流,以控制電動機的速度。(3)螺旋槳,是直接產生推力的部件,旋轉方向分為正反兩種。(4)電池,是多旋翼無人機的能源,與多旋翼無人機的飛行距離和最大負載重量等重要指標直接相關。對于多旋翼無人機而言,動力系統是其起飛階段、穩定飛行階段、降落階段的核心硬件。
2.2? 控制系統
通過多旋翼無人機所配置的姿態傳感器、氣壓計、加速度計甚至雷達及視覺傳感來接收信號。接收的信號進入中央處理器,中央處理器里的飛行控制算法和程序進行信號處理來穩定多旋翼無人機的飛行姿態。在GPS模式下通過路線規劃或者自主返航可實現飛機的自主、半自主飛行。
2.3? 機械部件
機械部件是多旋翼無人機的結構支撐體,一般由輕型材料切割、裝配、加工而成,除了用于安裝機臂、負載設備、飛控等設備外,還用于多旋翼無人機起降時支撐,通常還加裝一些橡膠件起到減緩降落沖擊作用。
2.4? 數據傳輸設備
將各種類型的數據(例如無人機拍攝的圖片和視頻)無線傳播到數據接收設備。
2.5? 任務載荷
多旋翼無人機根據執行的任務需要,搭載不同的任務載荷,如影視航拍設備、新聞媒體播報設備、交通管理設備、飛行表演設備、農業植保設備、電力巡線設備、測繪設備等。同時,遙控器用于無線實時控制多旋翼無人機。
3? ? 內燃機動力系統
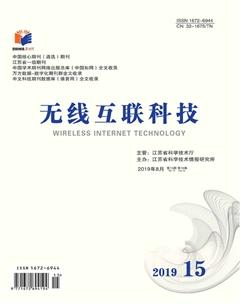
多旋翼無人機內燃機動力系統由活塞式航空發動機、燃油供給系統、電噴系統等組成。活塞航空發動機是一種四沖程、由火花塞點火的發動機,工作原理如圖1所示。
燃油供給系統由以下部分(見圖2)組成:①為油泵支架;②為油泵;③為泄壓閥;④為燃油濾清器;⑤為1號直通快插接頭;⑥為2號直通快插接頭;⑦為一分六分油器;⑧為供油盒下盒;⑨為供油盒上盒;⑩為供油盒油濾蓋。
電噴系統由以下部分組成:①為電噴主體;②為電噴嘴支架;③為發動機空濾;④為舵機;⑤為舵機搖臂;⑥為球頭拉桿;⑦為電噴嘴;如圖3所示。
采用內燃機動力的無人機續航時間長,一般可以達到1~4 h,且加注燃油方便快捷,動力系統強勁有力,非常適合植保作業,有利于農藥的下沉擴散。但是該動力系統長時間工作穩定性差,容易出現供油不足甚至油泵損壞,而且發動機的維護保養專業性強,一般操作人員難以正確使用和維護,維護所需工具繁多,一旦出現炸機,修復成本高,更換發動機耗時過長。
4? ? 鋰電池動力系統
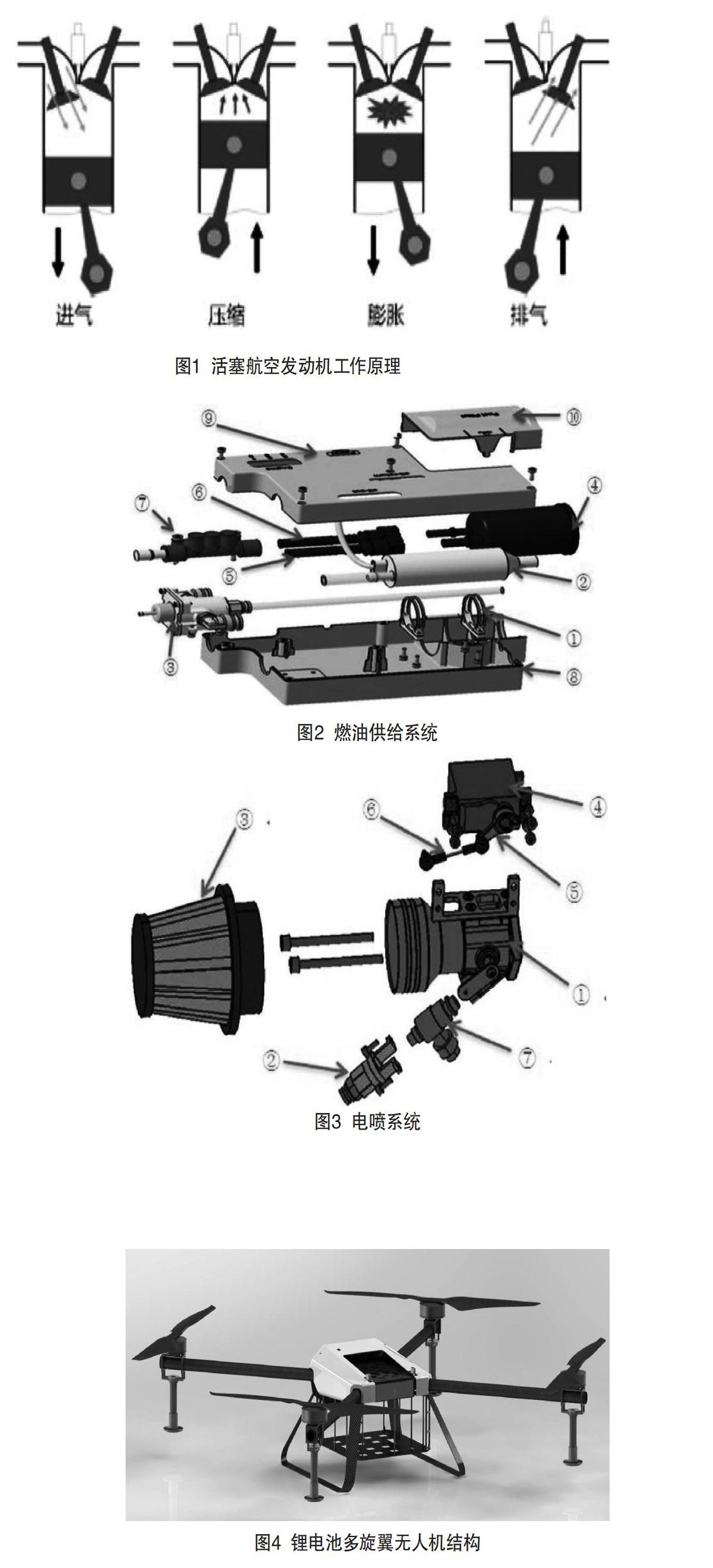
鋰電池動力系統通常包括鋰電池、ESC、電機、螺旋槳等,鋰電池多旋翼無人機結構如圖4所示。
鋰電池動力系統相較于其他動力系統體積更小、重量更輕,尤其是目前鋰電池技術發展迅速,單位體積能量密度越做越大,有利于多旋翼無人機的設備布置,增加任務負載的掛載位置。目前,很多鋰電池在功能上設計成插拔式,大大提升了換電速度,提高了作業效率。但是目前鋰電池的續航時間基本沒有超過1 h,平均續航時間沒有超過30 min,在進行遠距離或者長時間飛行任務時,往往需要頻繁地返回起飛點更換電池,影響飛行任務的完成實效性甚至無法完成飛行任務,同時,頻繁地更換電池導致需要儲備較多電池,使得整機的購買成本大大上升,考慮到鋰電池的使用壽命一般只有3年左右,使得無人機的使用成本比較高。
5? ? 燃料電池鋰電池混合動力系統
燃料電池組成高電壓大功率系統,實現無人機系統效率和續航時間的提升,從而提升了系統的飛行半徑和掛載能力。采用高可靠性、節能型的高電壓動力系統,進一步提高了系統的效率。高壓動力系統采用矢量控制技術,進一步提高了系統的飛行性能。最大起飛重量可以達到100 kg,最大有效載荷可以達到20 kg,抗風等級可以達到12 m/s,可以連續地將化學能轉換成電能而不受卡諾循環的限制。
燃料電池是一種直接將燃料的化學能轉化為電能的發電機。是利用燃料發電的最高效方式,整個反應沒有燃燒過程,沒有任何有害物質排放,幾乎沒有噪音,也不需要維護,可以直接使用天然氣、甲醛、氫氣。但是燃料電池反應過程不能快速變化,即電機無法實現快速地變換轉速,所以整個動力系統還需并聯鋰電池進行電流的補充。實現多旋翼無人機的起飛以及快速機動。
該混合動力系統中燃料電池使用的是質子交換膜型燃料電池,質子交換膜燃料電池是一種低溫燃料電池,采用空氣作為氧化劑,能量轉化效率可以達到40%~60%,明顯高于內燃機的能量轉化效率,而且在常溫下啟動快、壽命長、無污染。燃料電池鋰電池混合動力無人機,具有以下優勢:
(1)高電壓電子調速系統針對大慣量、長航時特性飛行平臺設計,擁有強可靠性和節能型等優勢。
(2)完成高電壓電子調速系統的設計驗證、老化和產品化等工作,符合模塊化設計需求,可以滿足多種同類型產品的需求。
(3)達到高可靠性,滿足工業、軍工、反恐等特殊需求。
(4)高節能型,有效延長飛行器續航時間,并且減少功率器件額外能量損耗,有助于提高可靠性。
但該動力系統體積大,燃料電池造價昂貴,加注氫氣不夠便捷。
6? ? 結語
多旋翼無人機的經濟性指標、動力性、成本、用途、續航時間等在無人機設計之前會有一些共性的要求,比如長續航、載重量大、能量源加注快等,而鋰電池動力系統已經廣泛應用于消費級和工業級多旋翼無人機。目前,該行業面臨一個共同瓶頸就是飛行時間短,當需要長時間飛行時,必須儲備較多電池,間接導致飛行成本增加,而隨著燃料電池技術的成熟,批量生產后燃料電池的價格未來將大大降低,燃料電池鋰電池混合動力在多旋翼無人機上的應用將大大延長多旋翼無人機續航時間,減少能量源加注次數和加注時間,大大提升多旋翼無人機作業效率。
[參考文獻]
[1]TOURNIER G P,VALENTIY M, et al.Estimation and control of a quadrotor vehicle using monocular vision and moire patterns[C].Valencia:2006 AIAA Guidance,Navigation and Control Conference and Exhibit,2006.
[2]宗劍.油電混合動力多旋翼飛行器設計與研究[D].南昌:南昌航空大學,2017.
[3]TAYEBI A,ME GILVRAY S.Attitude stabilization of a four-rotor aerial robot[J].Conference on Decision and Control,2005(43):1216-1221.
[4]MCKERROW P.Modelling the draganflyer four-rotor helicopter[C].New York:IEEE International Conference on Robotics and Automation,2004.
[5]王鋒,吳江,周國慶,等.多旋翼飛行器發展概況研究[J].科技世界,2015(13):6-7.
[6]李占科,宋筆鋒,宋海龍.微型飛行器的研究現狀及其關鍵技術[J].飛行力學,2003(4):1-4.
[7]吳敏一.大疆精靈 4 正式發布最智能的無人機來了[J].計算機網絡,2016(7):36.
[8]AUSTIN R.Unmanned aircraft systems:UAVS design,deveiopment and deployment[J].Chestnet.org,2010(50):31-36.
[9]何昱.基于無刷電機的航模系統的研究[D].武漢:武漢理工大學,2008.