水質監測無人艇控制系統設計
2019-11-07 09:18:03劉群銘蘭育飛史穎剛
無線互聯科技 2019年15期
劉群銘 蘭育飛 史穎剛
摘? ?要:文章設計了水質監測無人艇的控制系統,包括艇載系統、手持終端和監控中心。系統涉及了嵌入式技術、GPS技術、無線通信技術、PWM控制技術和GPRS通信技術。系統具有兩種控制方式:一是通過手持終端、GPS和無線模塊對無人艇進行遙控;二是通過GPS和電子羅盤自主導航。兩種方式互相獨立工作。
關鍵詞:無人艇;控制系統;遠程遙控;自主導航
漁業養殖環境的水體質量,對水產動物的生長發育有重大影響,關系到水產養殖業的產量、質量和經濟效益[1]。目前,漁業養殖的水體環境監測,主要靠養殖戶自己測量[2],在水面比較遼闊的湖泊,人工檢測面臨速度慢、過程繁瑣、勞動強度大、不能有效覆蓋整體水域等難題。為解決上述難題,國內外的專家學者在水質監測系統[3]、水面無人艇[4]、自動巡航監測船[5]等方面,開展了相關研究。本文結合嵌入式技術和無線通信技術,設計了一種水質檢測無人艇的控制系統。通過手持終端和上位機軟件,實現無人艇的遠程控制。
1? ? 系統方案設計
根據無人艇和水質監測的控制要求,設計控制系統架構,如圖1所示。系統由艇載系統、手持終端、監控中心和無線通信幾個部分組成。在人眼可視范圍內,用戶操作手持終端,可對無人艇的動作進行無線遙控,無人艇存儲并返回位置信息給手持終端。當目標水域過遠時,監控中心通過通用分組無線服務技術(General Packet Radio Service,GPRS)網絡,向艇載系統發送地點坐標,實現無人艇自主導航。
2? ? 艇載控制系統設計
2.1? 艇載系統硬件方案設計
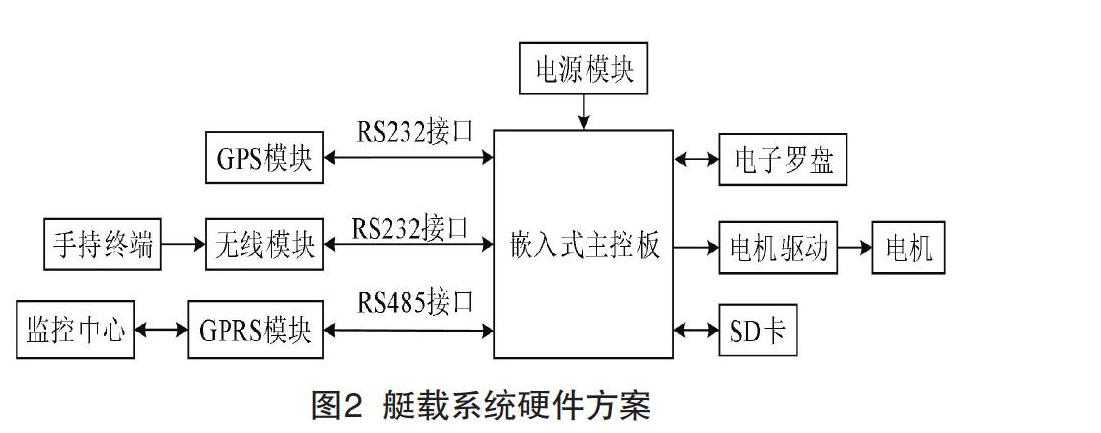
艇載系統包括嵌入式主控板、全球定位系統(Global Positioning System,GPS)模塊、電子羅盤、SD卡、電機和無線模塊等。艇載系統通過無線模塊,接收手持終端發送的控制命令,通過GPRS,接收監控中心發送的位置信息。主控板通過多種接口,控制各個模塊,并根據無線模塊接收的命令,發送相應的動作控制命令。主控板控制兩個直流電機,實現無人艇的前進、后退、左轉、右轉和速度調節等基本運動。電機驅動采用L298N芯片,采用脈沖寬度調制(Pulse Width Modulation,PWM)法[6]對電機進行調速控制。GPS模塊用于無人艇的定位,電子羅盤用于獲取無人艇運動方向信息,SD卡用于存儲無人艇的位置信息和方向信息。艇載系統硬件方案如圖2所示。
2.2? 艇載系統工作流程設計
系統有兩種工作方式:(1)當目標水域在人眼可視范圍內,通過手持終端對無人艇進行遙控。(2)當目標水域過遠時,無人艇進行自主導航。兩種方式互相獨立工作,無論采用哪種工作方式,都先要上電初始化,進行通信檢查。通信檢查無誤后,根據命令選擇工作方式。
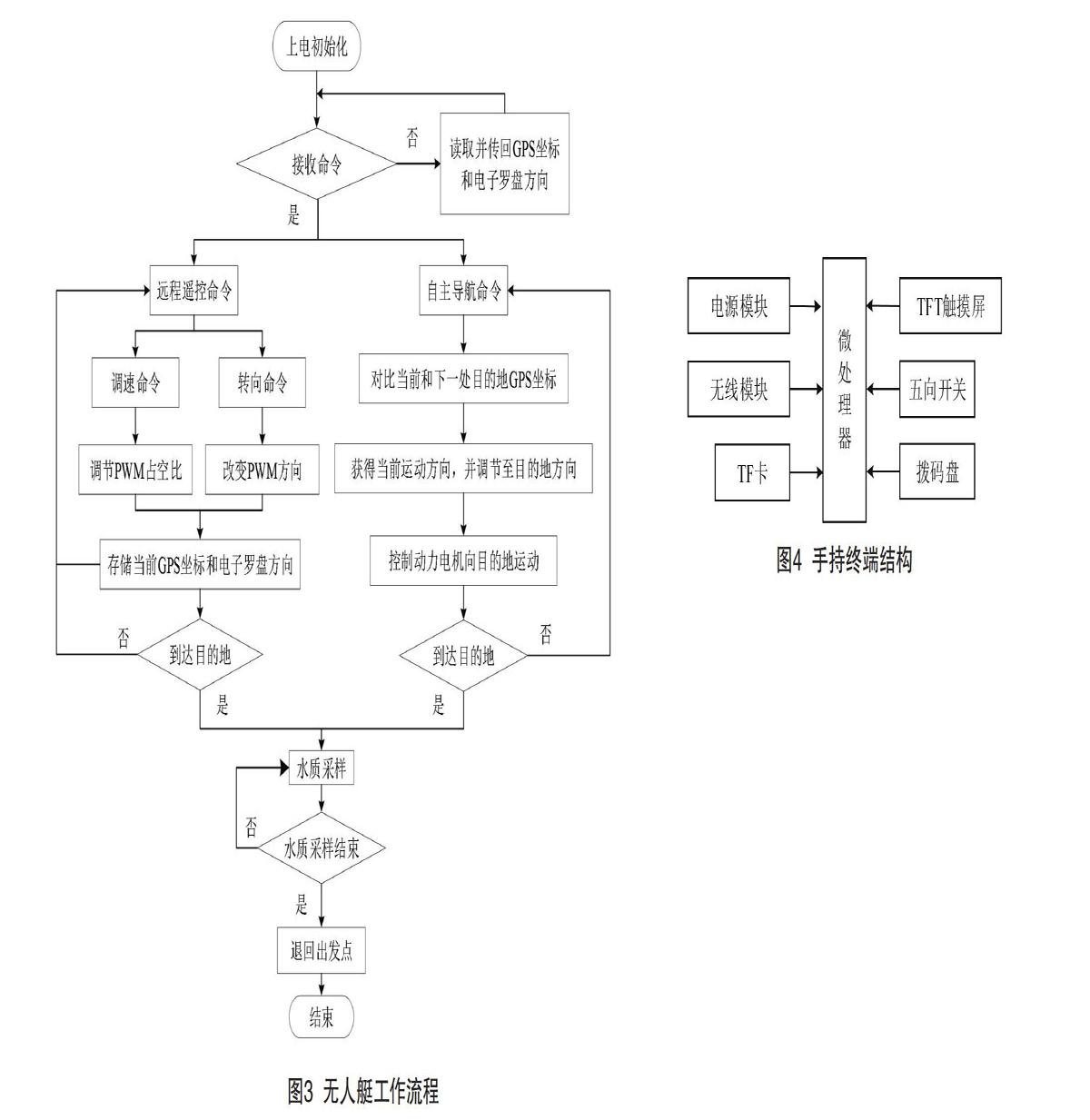
無人艇工作流程如圖3所示。系統啟動后,首先,進行通信檢查,各模塊完成初始化。其次,主控板進入等待命令狀態,在等待命令的過程中,讀取GPS信息和電子羅盤的方向角度,并將信息通過無線模塊發送到手持終端。再次,主控板接收到命令后,解析命令,并執行相應的操作。最后,令包括遠程遙控和自主導航。與遠程遙控相比,自主導航不僅能夠節省大量的人力、物力,而且具有導航范圍廣、控制簡便等優點。本文選擇GPS與電子羅盤聯合進行導航,通過對比GPS坐標,獲得無人艇需要運動的方向,利用電子羅盤調整無人艇的運動方向。
3? ? 手持終端硬件設計方案
通過手持終端對無人艇進行無線實時遙控時,用戶輸入的控制命令由無線模塊發送到無人艇上。本文設計手持終端硬件主要由微處理器、電源模塊、無線模塊、TF卡、TFT觸摸屏、五向開關和撥碼盤組成,其結構如圖4所示。
各個模塊的功能如下:
(1)微處理器,手持終端核心,用于處理人機接口的輸入,并且與無線模塊和TF卡進行通信。手持終端選擇功耗低,處理性能強的STM32F103VET6作為微控制單元(Micro Control Unit,MCU)。
(2)電源模塊,向各個模塊提供工作電壓。
(3)TF卡,用于存儲監測信息。
(4)TFT觸摸屏,TFT觸摸屏采用TFT-LCD系統,具有高響應度、高亮度、高對比度等優點[7]。本文采用觸摸屏作為人機交互接口,觸控操作簡便,用戶可以根據實際需要對用戶界面進行功能擴展。
(5)五向開關、撥碼盤:五向開關用于手動控制無人艇的運動狀態,包括前進、后退、左轉、右轉和停止,撥碼盤用于實現無人艇的速度控制。五向開關和撥碼盤配合使用,共同實現無人艇的運動控制。
4? ? 監控中心方案設計
監控中心由監控計算機和GPRS通信軟件組成。通過GPRS網絡,監控中心與艇載系統進行遠程數據通信,實現無人艇自主導航和GPS信息接收。本文采用C#語言,基于動態庫,設計GPRS通信軟件,實現艇載系統與監控中心的數據通信。每隔100 ms,系統觸發數據發送接收程序,包括客戶端的連接、斷開和數據接收等,以獲取、存儲并反饋無人艇當前的位置信息。
5? ? 結語
本文提出了一種水質監測無人艇控制系統的設計方案,完成了艇載系統、手持終端和監控中心的方案設計。由于時間限制,本文只完成了相關硬件設計和軟件流程設計,在后續研究中,將進行實物測試實驗和數據采集。期待在大面積的漁業養殖場中應用,實現對水體環境的監測,促進水產養殖業的發展。
[參考文獻]
[1]曾洋泱,匡迎春,沈岳,等.水產養殖水質監控技術研究現狀及發展趨勢[J].漁業現代化,2013(1):40-44.
[2]李家良.水面無人艇發展與應用[J].火力與指揮控制,2012(6):203-207.
[3]張龍.小型移動在線水質監測系統的研究[D].杭州:浙江大學,2012.
[4]廖煜雷,龐永杰,莊佳園.無人水面艇嵌入式基礎運動控制系統研究[J].計算機科學,2010(9):214-217.
[5]陳永澤,舒軍勇,王真亮,等.基于GPS定位的無人艇自主導航[J].重慶理工大學學報(自然科學),2016(8):117-121.
[6]劉松斌,王海星,李碩恒.基于STM32的直流電機PWM調速系統[J].化工自動化及儀表,2016(8):834-837.
[7]李金賜,梁九興.基于ARM Cortex M3內核TFT觸摸屏無線遙控設計[J].福建師大福清分校學報,2012(5):12-17.
Abstract:This paper designed the control system for water quality monitoring in unmanned boats, including boat system, handheld terminal and monitoring center. The system involves embedded technology, GPS technology, wireless communication technology, PWM control technology and GPRS communication technology. The system has two control modes: one is to remotely control the unmanned boat through the handheld terminal, GPS and wireless module, and the other is to independently navigate through GPS and electronic compass. The two methods work independently of each other.
Key words:unmanned boat; control system; remote control; autonomous navigation