基于多尺度特征向量的輸電線路無人機LiDAR點云數據分類方法
2019-11-07 02:50:00付紅安夏峻馬海鵬田帥王學平
山東農業大學學報(自然科學版) 2019年5期
付紅安,夏峻,馬海鵬,田帥,王學平
基于多尺度特征向量的輸電線路無人機LiDAR點云數據分類方法
付紅安,夏峻,馬海鵬,田帥,王學平
寧夏寧電電力設計有限公司, 寧夏 銀川 750000
提出了一種基于多尺度特征向量的輸電線路無人機LiDAR點云數據分類方法,可以有效對線路走廊中的地物進行分類。首先提取三維點云數據的多尺度局部特征作為特征參數構成特征向量,主要包括高程特征、連通特征、張量特征和平面特征。然后將多尺度特征向量輸入到多分類相關向量機分類器中,在完成分類器訓練之后,對無人機LiDAR點云數據進行分類。試驗結果表明,該方法可以有效區分地面、植物、建筑物、桿塔和電力線5類線路走廊地物LiDAR點云數據,分類整體精度達到96.63%。
輸電線路; 無人機; 云數據分類
隨著無人機技術和激光雷達掃描(Light Detection And Ranging,LiDAR)技術的不斷發展,及輸電線路無人機巡檢和三維建模研究的不斷深入,機載LiDAR技術可以有效解決傳統人工巡檢的缺點,減少輸電線路故障的發生[2]。在無人機LiDAR輸電線路巡檢中,線路走廊模型三維重建是重點研究問題,是線路三維可視化、通道清理、故障預測等應用的基礎[3]。其中,無人機LiDAR點云數據分類是線路三維重建研究的核心,直接決定了重建模型的準確性[4]。目前,無人機LiDAR點云數據分類主要有三類方法,主要包括地物典型幾何特征分析法、決策樹分析法和機器學習法三類。其中,地物典型幾何特征分析法只能對符合典型特征的地物進行分類,易受地形影響,且分類后的數據會部分缺失[5];決策樹分析法分類精度較高,效率高,但識別地物種類有限[6]。因此,將地物點云多尺度特征進行融合,采用機器學習的方法進行監督分類成為了研究重點。本文提出了一種基于多尺度特征向量的輸電線路無人機LiDAR點云數據分類方法。首先提取三維點云數據的多尺度局部特征作為特征參數構成特征向量,然后采用多分類相關向量機(Milticlass Relevance Vector Machine,M-RVM)分類器對無人機LiDAR點云數據進行分類,可以分為地面、植物、建筑物、桿塔和電力線5類,總體分類準確率達到96.63%。
1 特征提取
由于輸電線路走廊地形多變且環境復雜,所以無人機LiDAR點云數據信息量大且分類目標多樣,包括地面、建筑物、植物、電力線和桿塔。因此提取的點云數據特征值需要更加精細和準確,從而可以有效對每一類分類目標進行有效分類。由于特征值提取需要與其三維鄰域內的其他點云進行分析計算,因此進行定義特征值時需要結合領域的形狀和大小考慮。
根據線路走廊中地物的LiDAR點云數據特征與文獻[7]中的結論,本文定義了以下三種點云領域的劃分方式:(1)以待分類點為中心的球體鄰域V;(2)對整個數據集采用縱向二維格網劃分的格網領域2D;(3)對整個數據集采用三維格網劃分的格網領域3D。
其中,張量特征和平面特征基于V計算得出,高程特征和平面連通性特征基于2D計算得出,高程連通性特征基于3D計算得出。同時,本文從以下四個方面定義了16個特征參數來描述無人機LiDAR點云的局部特征。根據文獻[8]的研究結果和減少計算量,本文僅利用點云空間幾何信息來定義特征參數,未采用回波信息。
1.1 高程特征
根據式(1)~(3)可以計算出特征值:平面密度1、二維體密度2和三維體密度3。


式中,LiDAR點云點在2D和3D內的總數量為2D和3D,二維格網的平面面積和體積分別為2D和2D,三維格網的體積面積為3D。植物和電力桿塔的點云數據所在的2D內平面密度較大,電力線的點云數據所在的2D內體密度較小。
根據式(4)~(6)可以計算出特征值:最大高差4、高程方差5和高程平均值6。
式中,P為點云數據在二維格網中某個點的高程,P、P和P分別為點云數據在二維格網中間、最高和最低位置的高程。對于電力線和桿塔所在的二維格網,最大高差4較大;對于地面所在的二維格網,其高程平均值6較小。
1.2 連通特征
根據式(7)~(9)可以計算出特征值:高程連通性7、平面連通性8。

式中,PN為點云數據在相鄰二維格網中最高位置的高程。高程連通性7、平面連通性8可以用來區分電力線和桿塔點云數據。
1.3 張量特征
點云數據領域協方差矩陣的特征值可以描述局部張量特征。設為點云點P的領域協方差矩陣,可以由式(10)和式(11)計算得出。

對進行特征值分解計算,選取特征值1、2和3,根據式(12)~(15)計算獲得張量特征,包括點云點在3D內所有點的各向異性9、平面分布特性10、球面分布特性11和線狀分布特性12。



9和10在非平面處較低,在平面處較高;11非平面處較高,在平面處較低;12在線性結構處較高。
1.4 平面特征
根據文獻[8]中的結論,設該三維領域3D內中點的法向量角度為13;所在3D內所有點法向量角度方差為14,所有點到其擬合平面距離的殘差為15,所有點擬合的平面距離為16。所計算的局部領域平面特征可以有效的對建筑物和植物的點云數據進行分類。
根據上述計算獲得特征值,可以構建特征向量=[1,2,…,16],且該特征向量的計算與領域尺度的大小相關,會直接影響到最終的地物點云數據分類準確性。當較小時會導致局部特征不明顯,當較大時會導致地物分類準確度降低。本文采用多尺度領域計算特征值,從而達到更好的區分度和穩定性。領域尺度取值如表1所示。

表1 領域尺度k取值
因此,可以構建最終的LiDAR點云數據多尺度分類特征向量=[f1,f2,f3]。
2 多分類相關向量機
由于輸電線路無人機LiDAR點云數據的訓練樣本量較小,且在實際應用中需要較快的計算速度,因此本文提出采用M-RVM對輸電線路無人機LiDAR點云數據進行分類[9]。M-RVM采用0-1向量的形式對點云數據的類別進行表示,如果需要分類的點云數據有種,則采用維的0-1列向量的形式進行表示。輸電線路走廊無人機LiDAR點云數據在本文被分為地面、建筑物、植物、電力線和桿塔5種,則采用5維列向量(0,0,0,0,1)T、(0,0,0,1,0)T、(0,0,1,0,0)T、(0,1,0,0,0)T和(1,0,0,0,0)T作為類別標簽。M-RVM具體算法流程見文獻[9]。
3 試驗驗證
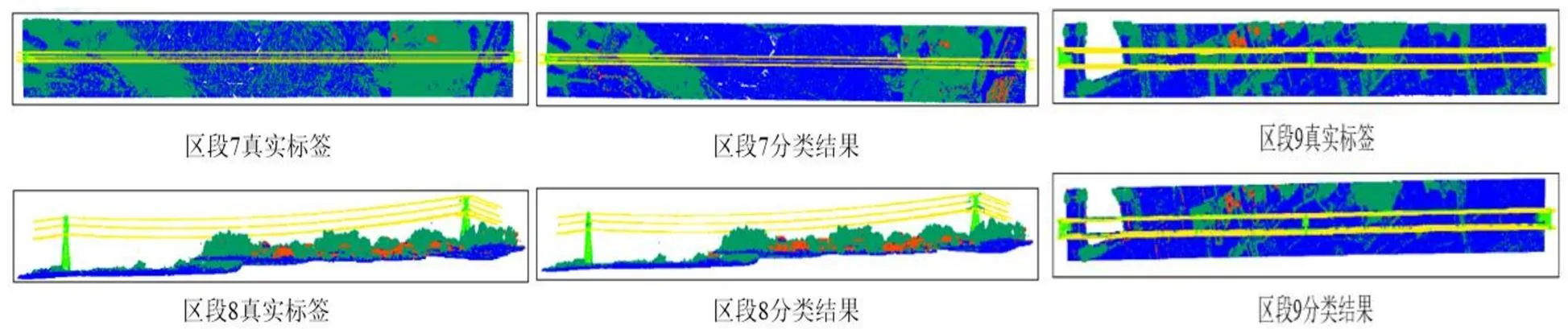
圖1 分類結果與真實標簽的對比
為驗證本文提出算法的有效性,采用貴州省某條輸電線路走廊的無人機LiDAR點云數據進行試驗。該條輸電線路走廊長度約10 km,寬度約40 m,包括10基桿塔和2回線路,地物主要包括植物和建筑物。點云數據總點數約為2×106個,平均點間距約為0.5 m。試驗環境采用Inetel i5-7200U四核處理器,2.7 GHz主頻,8 GB內存的計算機。由于訓練分類器需要綜合考慮各類地物信息,本文將10基桿塔之間的9個走廊區段的前6個(區段1~區段6)選為訓練集,后3個(區段7~區段9)選為測試集。為對本文方法的分類結果進行評價,所有的點云數據均需要人工進行標記類別標簽。分類結果如圖1和表2所示。試驗結果表明,該方法可以有效區分地面、植物、建筑物、桿塔和電力線5類線路走廊地物LiDAR點云數據,分類整體精度達到96.63%。

表2 分類準確度
4 結論
基于高程特征、連通特征、張量特征和平面特征,本文通過定義不同的點云領域劃分方式和領域尺度,構建的無人機LiDAR點云數據多尺度分類特征向量可以有效用于輸電線路走廊地物的分類計算。本文提出的基于多尺度分類特征向量的輸電線路無人機LiDAR點云數據分類方法可以有效對地面、植物、建筑物、桿塔和電力線5種地物進行分類,分類總體精度達到96.63%,分類結果可以用于輸電線路走廊三維建模。
[1] 楊淵,陳鳳翔,虢韜,等.基于LiDAR點云特征和模型擬合的高壓線提取[J].中國科學院大學學報,2018,35(5):612-616
[2] 沈小軍,杜勇,王仁德,等.基于地面激光雷達的輸電線路鐵塔傾斜度測量[J].電子測量與儀器學報,2017,31(4):516-521
[3] Guo B, LI QQ, Huang XF,. An Improved Method for Power-Line Reconstruction from Point Cloud Data[J]. Remote Sensing, 2016,8(1):36
[4] Kim HB, Sohn G. Point-based Classification of Power Line Corridor Scene Using Random Forests[J]. Photogrammetric Engineering & Remote Sensing, 2013,79(9):821-833
[5] 彭向陽,陳馳,徐曉剛,等.基于無人機激光掃描的輸電通道安全距離診斷技術[J].電網技術,2014,38(11):3254-3259
[6] 陳鑫松,袁曉妍,李響.綜合單點和點簇的建筑物點云分類方法[J].測繪與空間地理信息,2018,41(6):91-93
[7] Guo B, Huang XF, Zhang F,. Classification of airborne laser scanning data using JointBoost[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015,100:71-83
[8] Jie S, Zulong L. Airborne LiDAR Feature Selection for Urban Classification Using Random Forests[J]. Geomatics and Information Science of Wuhan University, 2014,38(11):207--212
[9] 尹金良,朱永利,俞國勤.基于多分類相關向量機的變壓器故障診斷新方法[J].電力系統保護與控制,2013,41(5):77-82
LiDAR Point Cloud Data Classification Method for Transmission Line UAV Based on Multi-scale Feature Vector
FU Hong-an, XIA Jun, MA Hai-peng, TIAN Shuai, WANG Xue-ping
750000,
A LiDAR point cloud data classification method for transmission line UAV based on multi-scale classification features is proposed, which can effectively classify the grounding objects in the corridor of transmission line. Firstly, multi-scale local features of 3D point cloud data are extracted as feature parameters to form feature vectors, which include height features, connectivity feature, tensor feature and plane feature. After that, the feature vector is inputted into the classifier of multi-classification correlation vector machine. After the classifier training is completed, the LiDAR point cloud data of UAV is classified. The test results show that this method can effectively distinguish 5 kinds LiDAR point cloud data of line corridor, which includes ground, plants, buildings, towers and power lines. The classified overall accuracy reached 96.63%.
Transmission line; UAV; cloud data classification
TM769
A
1000-2324(2019)05-0852-03
10.3969/j.issn.1000-2324.2019.05.025
2018-07-21
2018-09-01
付紅安(1990-),男,碩士研究生,工程師,主要研究方向為輸電線路設計及新技術. E-mail:yishilfxy@163.com
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54