基于改進(jìn)關(guān)聯(lián)規(guī)則的卸船機(jī)故障預(yù)測(cè)模型
2019-11-05 07:04:56葉永偉程毅飛賴劍人任設(shè)東
中國(guó)機(jī)械工程 2019年20期
葉永偉 程毅飛 賴劍人 任設(shè)東
浙江工業(yè)大學(xué)特種設(shè)備制造與先進(jìn)加工技術(shù)教育部/浙江省重點(diǎn)實(shí)驗(yàn)室,杭州,310014
0 引言
橋式抓斗卸船機(jī)是企業(yè)港口生產(chǎn)中重要的大型散料卸貨工具,具有抓斗起升和開閉、小車行走、前大梁仰俯及整機(jī)沿軌道行走的功能,在實(shí)際生產(chǎn)中占有很重要的地位。卸船機(jī)發(fā)生故障會(huì)影響到原有功能,有可能出現(xiàn)嚴(yán)重的事故,造成經(jīng)濟(jì)損失[1],因此有必要對(duì)卸船機(jī)系統(tǒng)的健康狀態(tài)進(jìn)行監(jiān)測(cè)、故障分析和故障預(yù)測(cè),以確保卸船機(jī)安全穩(wěn)定地運(yùn)行,提早預(yù)警,減少因突發(fā)故障產(chǎn)生的經(jīng)濟(jì)損失以及避免人員傷亡等重大事故的發(fā)生[2]。
故障趨勢(shì)預(yù)測(cè)方法作為短時(shí)預(yù)測(cè)方法,主要包括基于機(jī)理模型和基于數(shù)據(jù)驅(qū)動(dòng)的故障預(yù)測(cè)方法[3-4]。近年來,隨著傳感器技術(shù)和信息處理技術(shù)的發(fā)展,基于數(shù)據(jù)驅(qū)動(dòng)的方法由于僅需利用設(shè)備運(yùn)行狀態(tài)的監(jiān)測(cè)數(shù)據(jù)就能及時(shí)地反映出設(shè)備的性能狀態(tài),實(shí)現(xiàn)故障預(yù)測(cè)而被廣泛應(yīng)用。傳統(tǒng)方法中,基于數(shù)據(jù)驅(qū)動(dòng)的港口船機(jī)故障診斷方法主要有:神經(jīng)網(wǎng)絡(luò)故障診斷方法模擬船機(jī)復(fù)雜的非線性系統(tǒng),以故障特征信號(hào)作為神經(jīng)網(wǎng)絡(luò)輸入,診斷結(jié)果作為網(wǎng)絡(luò)輸出;專家系統(tǒng)故障診斷方法通過求解船機(jī)復(fù)雜的實(shí)際問題,推斷船機(jī)故障所在;小波分析方法利用信號(hào)變換特征進(jìn)行故障識(shí)別;故障樹診斷方法尋找船機(jī)的故障致因;粗糙集理論用于挖掘船機(jī)中隱含的知識(shí),揭示潛在的規(guī)律;多傳感器信息融合診斷技術(shù)獲取船機(jī)各種特征參數(shù)信息,建立船機(jī)故障的預(yù)測(cè)、定位和排除模型等[5-6]。其中,基于多傳感器信息融合故障預(yù)測(cè)模型主要根據(jù)設(shè)備正常工作與異常工作狀態(tài)提取分析各種特征參數(shù)的變化信息來實(shí)現(xiàn)設(shè)備故障的預(yù)測(cè)過程。如橋式抓斗卸船機(jī)這種工作環(huán)境比較惡劣,易受到載荷、工況變化等不確定因素影響的設(shè)備,其運(yùn)行過程狀態(tài)呈現(xiàn)出動(dòng)態(tài)的、實(shí)時(shí)變化的特征。因此采用關(guān)聯(lián)規(guī)則分析方法獲得表征卸船機(jī)狀態(tài)的關(guān)聯(lián)規(guī)則,并利用改進(jìn)的多傳感器信息融合故障預(yù)測(cè)方法能夠準(zhǔn)確地實(shí)現(xiàn)卸船機(jī)實(shí)時(shí)運(yùn)作下的故障預(yù)測(cè)。
楊行舟等[7]研究了基于徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)的門式起重機(jī)故障診斷系統(tǒng)。崔英等[8]提出了融合遠(yuǎn)程監(jiān)控、專家系統(tǒng)、智能診斷功能要求于一體的起重機(jī)遠(yuǎn)程監(jiān)控及故障診斷系統(tǒng)。裴瑋等[9]提出基于分布式光纖傳感技術(shù)的動(dòng)態(tài)數(shù)據(jù)時(shí)間序列分析模型,對(duì)起重機(jī)主梁進(jìn)行損傷預(yù)警。呂金華等[10]采用小波包分解和神經(jīng)網(wǎng)絡(luò)相結(jié)合的方法對(duì)卸船機(jī)電機(jī)進(jìn)行故障診斷。尚敬強(qiáng)等[11]將遺傳算法與人工神經(jīng)網(wǎng)絡(luò)結(jié)合,并應(yīng)用于起重機(jī)狀態(tài)識(shí)別和故障診斷。舒安慶等[12]建立了故障樹診斷分析門座式起重機(jī)臂架折斷的主要風(fēng)險(xiǎn)源。田海雷等[13]建立了小波包分解和支持向量機(jī)相結(jié)合的預(yù)測(cè)模型,對(duì)液壓泵進(jìn)行故障預(yù)測(cè)。SAFIZADEH等[14]利用多傳感器數(shù)據(jù)融合技術(shù)對(duì)滾動(dòng)體振動(dòng)故障進(jìn)行了診斷研究。目前卸船機(jī)真實(shí)故障表現(xiàn)為多個(gè)故障特征信號(hào)相互耦合,僅對(duì)單一故障進(jìn)行診斷不能根治整機(jī)系統(tǒng)故障隱患,應(yīng)該深入研究系統(tǒng)內(nèi)部各組成部分的相互作用和聯(lián)結(jié)關(guān)系。橋式抓斗卸船機(jī)實(shí)際狀態(tài)監(jiān)測(cè)參量之間存在復(fù)雜的相關(guān)性,傳統(tǒng)線性相關(guān)性處理方式并不適用于卸船機(jī)的實(shí)際工況。
本文采用興趣度關(guān)聯(lián)規(guī)則來表征卸船機(jī)的運(yùn)行狀況,引入權(quán)重系數(shù)來定量分析其狀態(tài)特征變化,并將其應(yīng)用到橋式抓斗卸船機(jī)故障預(yù)測(cè)中[15]。首先,利用改進(jìn)的關(guān)聯(lián)規(guī)則算法挖掘監(jiān)測(cè)數(shù)據(jù),獲取表征卸船機(jī)狀態(tài)的關(guān)聯(lián)規(guī)則;然后計(jì)算故障類型與故障征兆、故障征兆與關(guān)聯(lián)規(guī)則兩兩之間的關(guān)聯(lián)關(guān)系,并確定其權(quán)重系數(shù),構(gòu)建卸船機(jī)預(yù)測(cè)模型;最后,通過實(shí)時(shí)監(jiān)測(cè)關(guān)聯(lián)規(guī)則組的狀態(tài)變化,進(jìn)行卸船機(jī)的狀態(tài)評(píng)估和故障預(yù)測(cè)。
1 興趣度關(guān)聯(lián)規(guī)則理論
傳統(tǒng)Apriori算法下的支持度-置信度框架體系,只能適應(yīng)于離散型數(shù)據(jù)的關(guān)聯(lián)規(guī)則挖掘,同時(shí)基于此框架的關(guān)聯(lián)規(guī)則采掘存在許多弊端[16],文獻(xiàn)[16]指出支持度閾值設(shè)定得過低或過高將會(huì)導(dǎo)致產(chǎn)生價(jià)值冗余的規(guī)則或丟失有用的規(guī)則,因此要避免將支持度作為最初項(xiàng)集產(chǎn)生的主要決定因素[17]。針對(duì)橋式抓斗卸船機(jī)監(jiān)測(cè)數(shù)據(jù)特征,先將其進(jìn)行聚類離散化處理,并用興趣度I來反映關(guān)聯(lián)規(guī)則中A和B的關(guān)系程度,用置信度C來反映這種情況的發(fā)生方向,用支持度S來反映這種情況是否為普遍規(guī)律。
1.1 興趣度關(guān)聯(lián)規(guī)則描述
關(guān)聯(lián)規(guī)則(association rules, AR)表示數(shù)據(jù)庫(kù)中隱含于若干項(xiàng)目之間且滿足某種設(shè)定要求的關(guān)聯(lián)關(guān)系的規(guī)則,可以定義為形如A?B(A稱為規(guī)則的左側(cè),B稱為規(guī)則的右側(cè))的蘊(yùn)含式,其中A?T,B?T,A∩B=?,T為事務(wù)數(shù)據(jù)庫(kù)D中的事務(wù)項(xiàng)[18]。在關(guān)聯(lián)規(guī)則中,記:
(1)數(shù)據(jù)庫(kù)中所有事務(wù)項(xiàng)T的個(gè)數(shù)為|D|;
(2)T中項(xiàng)集A出現(xiàn)頻率為f(A);
(3)A?B的支持度是D中包含A∪B的比例,用概率來表示,supp( )表示支持度,即
(1)
(4)A?B的置信度是D中包含A的同時(shí)又包含B的比例,用條件概率來表示,conf( )表示置信度,即
(2)
(5)S(A?B)min為關(guān)聯(lián)規(guī)則的最小支持度,C(A?B)min為關(guān)聯(lián)規(guī)則的最小置信度。
興趣度是指基于統(tǒng)計(jì)獨(dú)立性假設(shè)下真正的強(qiáng)度與期望的強(qiáng)度之比,給定交易集D上基于概率論的關(guān)聯(lián)規(guī)則A?B的興趣度[19]:
(3)
其中,值域?yàn)镸i,當(dāng)I值遠(yuǎn)大于1時(shí),表明這條規(guī)則越感興趣,實(shí)際利用價(jià)值越大;當(dāng)I值遠(yuǎn)小于1時(shí),表明該規(guī)則的反面規(guī)則越感興趣;I不小于0。
1.2 Apriori算法改進(jìn)
Apriori算法不能直接用于工程領(lǐng)域數(shù)據(jù)庫(kù)中屬性為數(shù)值型(如應(yīng)力)的狀態(tài)參數(shù),以及各運(yùn)行設(shè)備和系統(tǒng)機(jī)械狀態(tài)之間關(guān)聯(lián)程度未知的情況,需先將其轉(zhuǎn)化為布爾型關(guān)聯(lián)規(guī)則進(jìn)行挖掘[20]。根據(jù)橋式抓斗卸船機(jī)本身的關(guān)聯(lián)特性和其生產(chǎn)規(guī)律以解決Apripri的適應(yīng)性問題,本文將改進(jìn)算法分為以下三部分。
(1)利用聚類算法將數(shù)據(jù)離散為布爾型。引入聚類算法離散,達(dá)到兩方面目的:①分層聚類。考慮到橋式抓斗卸船機(jī)監(jiān)測(cè)狀態(tài)參數(shù)屬于實(shí)時(shí)采集,數(shù)值型屬性主要為振動(dòng)烈度和應(yīng)力值,故將數(shù)值型數(shù)據(jù)進(jìn)行分區(qū)處理,轉(zhuǎn)化為布爾型關(guān)聯(lián)規(guī)則進(jìn)行處理。②劃分聚類。根據(jù)卸船機(jī)實(shí)際運(yùn)行狀態(tài),保存數(shù)量較小的類,得到數(shù)據(jù)的實(shí)際分布結(jié)果[21]。

(3)引入興趣度提高規(guī)則質(zhì)量。利用興趣度描述A和B之間的關(guān)系密切程度,避免支持度和置信度體系帶來的局限性,排除支持度閾值過低和過高所引起的規(guī)則冗余、規(guī)則缺失等情況。在興趣度-支持度-置信度框架運(yùn)行過程中根據(jù)以下4種情況來篩選滿意的關(guān)聯(lián)規(guī)則(Cmin代表最小置信度,Imin代表最小興趣度):①C
根據(jù)卸船機(jī)實(shí)際運(yùn)行監(jiān)測(cè)狀態(tài)信息,排除情況④中反面規(guī)則的出現(xiàn)。
(4)改進(jìn)的Apriori算法流程如圖1所示。圖中,mCA表示用于數(shù)據(jù)聚類的競(jìng)爭(zhēng)聚類算法;L1表示1-頻繁項(xiàng)集,K表示循環(huán)次數(shù),LK表示K-候選項(xiàng)集。
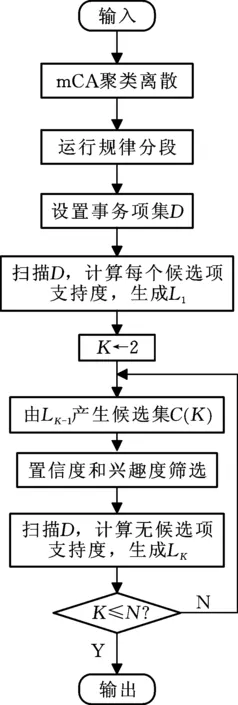
圖1 改進(jìn)后的關(guān)聯(lián)規(guī)則算法流程圖Fig.1 Improved algorithm flow chart of association rules
2 故障預(yù)測(cè)模型
利用目標(biāo)系統(tǒng)歷史測(cè)試數(shù)據(jù)、在線狀態(tài)監(jiān)測(cè)和測(cè)試數(shù)據(jù),提取橋式抓斗卸船機(jī)系統(tǒng)在運(yùn)行過程中不同階段的狀態(tài)變量,分別建立故障類型與故障征兆的權(quán)重關(guān)系,故障征兆與反映卸船機(jī)狀態(tài)特征的關(guān)聯(lián)規(guī)則組之間的權(quán)重關(guān)系;將前述已監(jiān)測(cè)的狀態(tài)參數(shù)數(shù)據(jù)作為建模數(shù)據(jù),建立訓(xùn)練數(shù)據(jù)驅(qū)動(dòng)預(yù)測(cè)模型并對(duì)故障類型進(jìn)行預(yù)測(cè);最后進(jìn)行故障預(yù)測(cè)結(jié)果判別。
2.1 故障類型與故障征兆權(quán)重關(guān)系
橋式抓斗卸船機(jī)實(shí)際運(yùn)行過程中,當(dāng)卸船機(jī)發(fā)生某一故障時(shí),往往伴隨著多個(gè)故障征兆,同樣,一個(gè)故障征兆有可能對(duì)應(yīng)多個(gè)故障類型[15]。因此,橋式抓斗卸船機(jī)故障預(yù)測(cè)的前提就是確定各種故障相對(duì)應(yīng)的故障征兆。首先,確定橋式抓斗卸船機(jī)的故障類型及故障征兆,見表1。
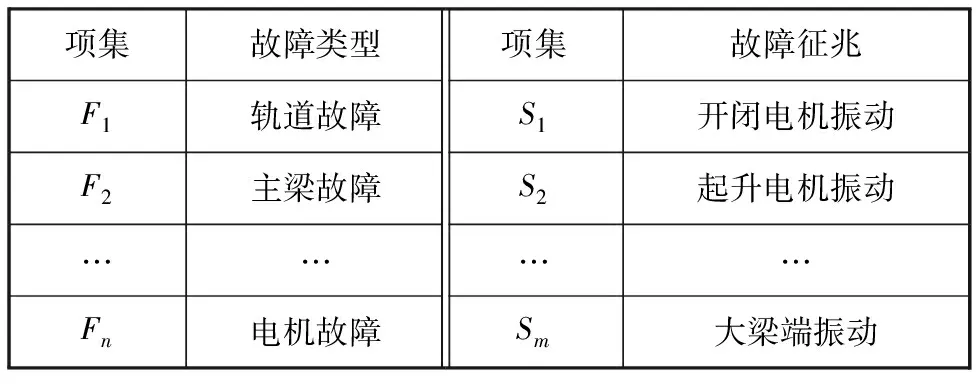
表1 卸船機(jī)故障類型及故障征兆
然后,采集相同工況下足夠多的歷史實(shí)驗(yàn)數(shù)據(jù)作為樣本,分析故障類型與故障征兆之間的關(guān)聯(lián)性,在卸船機(jī)故障類型與故障征兆關(guān)聯(lián)分析中可以記:①事務(wù)數(shù)據(jù)庫(kù)Di={第i個(gè)故障類型Fi發(fā)生};②項(xiàng)集Si={第i個(gè)故障征兆狀態(tài)超標(biāo)};③總樣本中,各故障征兆Sn發(fā)生的狀態(tài)量超標(biāo)次數(shù)為f(Sn);④故障例總數(shù)|Dm|中,各故障征兆Sn發(fā)生的狀態(tài)量超標(biāo)次數(shù)為f(Sn∪Fm);⑤關(guān)聯(lián)規(guī)則為Sn?Fm;⑥第m個(gè)故障類型Fm對(duì)應(yīng)的約簡(jiǎn)后故障征兆為Sm,n,F(xiàn)m={Sm,1,Sm,2, …,Sm,Nm},其中Nm為約簡(jiǎn)后Fm中故障征兆個(gè)數(shù)。
由式(1)和式(2)分別求得關(guān)聯(lián)規(guī)則Sn?Fm的支持度S(Sn?Fm)和置信度C(Sn?Fm)。當(dāng)支持度大于設(shè)定值時(shí),認(rèn)為此關(guān)聯(lián)規(guī)則有效,即Sn與Fm之間存在緊密的相互關(guān)聯(lián)關(guān)系。由置信度可得權(quán)重系數(shù)表達(dá)式:
(4)
式中,w′m,n為故障類型Fm中故障征兆為Sm,n的權(quán)重系數(shù);Cm,n為相應(yīng)的置信度。
2.2 故障征兆與關(guān)聯(lián)規(guī)則組權(quán)重關(guān)系
故障征兆與關(guān)聯(lián)規(guī)則組的權(quán)重關(guān)系實(shí)際上就是通過挖掘出的能表征卸船機(jī)狀態(tài)的關(guān)聯(lián)規(guī)則來反映與之相關(guān)的故障征兆。對(duì)每個(gè)關(guān)聯(lián)規(guī)則賦予權(quán)重時(shí),應(yīng)使故障征兆狀態(tài)特征中越重要的規(guī)則權(quán)重越大,并隨著數(shù)據(jù)信息的不斷更新對(duì)權(quán)值會(huì)有不同方位的收斂。根據(jù)各規(guī)則的屬性權(quán)重比wi/wj(i,j=1, 2, …,n),構(gòu)造權(quán)重比矩陣M:
其中,n是M的唯一非零特征根,記為λmax,而w是n所對(duì)應(yīng)的特征矢量,并采用歸一化的特征作為權(quán)重矢量:
構(gòu)建基于關(guān)聯(lián)規(guī)則支持度S、置信度C和興趣度I的權(quán)重計(jì)算公式:
(5)
其中,wi(Si,Ci,Ii)表示規(guī)則RAi在故障征兆狀態(tài)特征中的權(quán)重;Si、Ci、Ii分別表示該規(guī)則的支持度、置信度和興趣度。
2.3 構(gòu)建預(yù)測(cè)模型
通過改進(jìn)的興趣度量化關(guān)聯(lián)規(guī)則挖掘狀態(tài)參數(shù)數(shù)據(jù)中反映橋式抓斗卸船機(jī)狀態(tài)的關(guān)聯(lián)規(guī)則,在同一子系統(tǒng)和工況下,篩選可以反映故障征兆Sj參量的所有關(guān)聯(lián)規(guī)則RAj,k以及表征故障類型Fi的所以故障征兆Si,j,并分別計(jì)算故障征兆與關(guān)聯(lián)規(guī)則組權(quán)重關(guān)系以及故障類型與故障征兆權(quán)重關(guān)系相對(duì)應(yīng)的權(quán)重系數(shù),構(gòu)造故障類型與關(guān)聯(lián)規(guī)則組的關(guān)聯(lián)規(guī)則指向性特征約束函數(shù):
(6)

橋式抓斗卸船機(jī)故障預(yù)測(cè)步驟如下。
(1)利用改進(jìn)的興趣度關(guān)聯(lián)規(guī)則算法挖掘能表征卸船機(jī)狀態(tài)的關(guān)聯(lián)規(guī)則RAj,k。
(2)建立橋式抓斗卸船機(jī)故障預(yù)測(cè)模型(圖2),并計(jì)算相應(yīng)的權(quán)重系數(shù)。

圖2 故障預(yù)測(cè)模型Fig.2 Fault prediction model
(3)計(jì)算關(guān)聯(lián)規(guī)則RAj,k的置信度變化率Δ,并代入故障預(yù)測(cè)函數(shù)式(6)。
(4)預(yù)測(cè)評(píng)估故障發(fā)生類型。其中,F(xiàn)i為第i個(gè)故障類型,Si,j為對(duì)應(yīng)第i個(gè)故障類型的第j個(gè)故障征兆,RA1,e、RAi,j、RAn,g分別為對(duì)應(yīng)故障征兆的關(guān)聯(lián)規(guī)則。
通過橋式抓斗卸船機(jī)監(jiān)測(cè)系統(tǒng),獲取原始監(jiān)測(cè)數(shù)據(jù)源,利用時(shí)域分析方法獲得以振動(dòng)強(qiáng)度和應(yīng)力值為特征的數(shù)據(jù)類型為數(shù)值型的數(shù)據(jù)庫(kù)。振動(dòng)強(qiáng)度是指振動(dòng)速度的有效值(均方根值),能夠反映機(jī)械振動(dòng)狀態(tài)簡(jiǎn)明綜合、實(shí)用有效的特征量,其計(jì)算公式為
其中,v(n)為振動(dòng)速度,N為所測(cè)信號(hào)長(zhǎng)度,VRMS為振動(dòng)強(qiáng)度能量值。以此數(shù)據(jù)庫(kù)為挖掘點(diǎn),經(jīng)上述預(yù)測(cè)模型流程進(jìn)行故障預(yù)測(cè)。橋式抓斗卸船機(jī)故障預(yù)測(cè)流程如圖3所示。
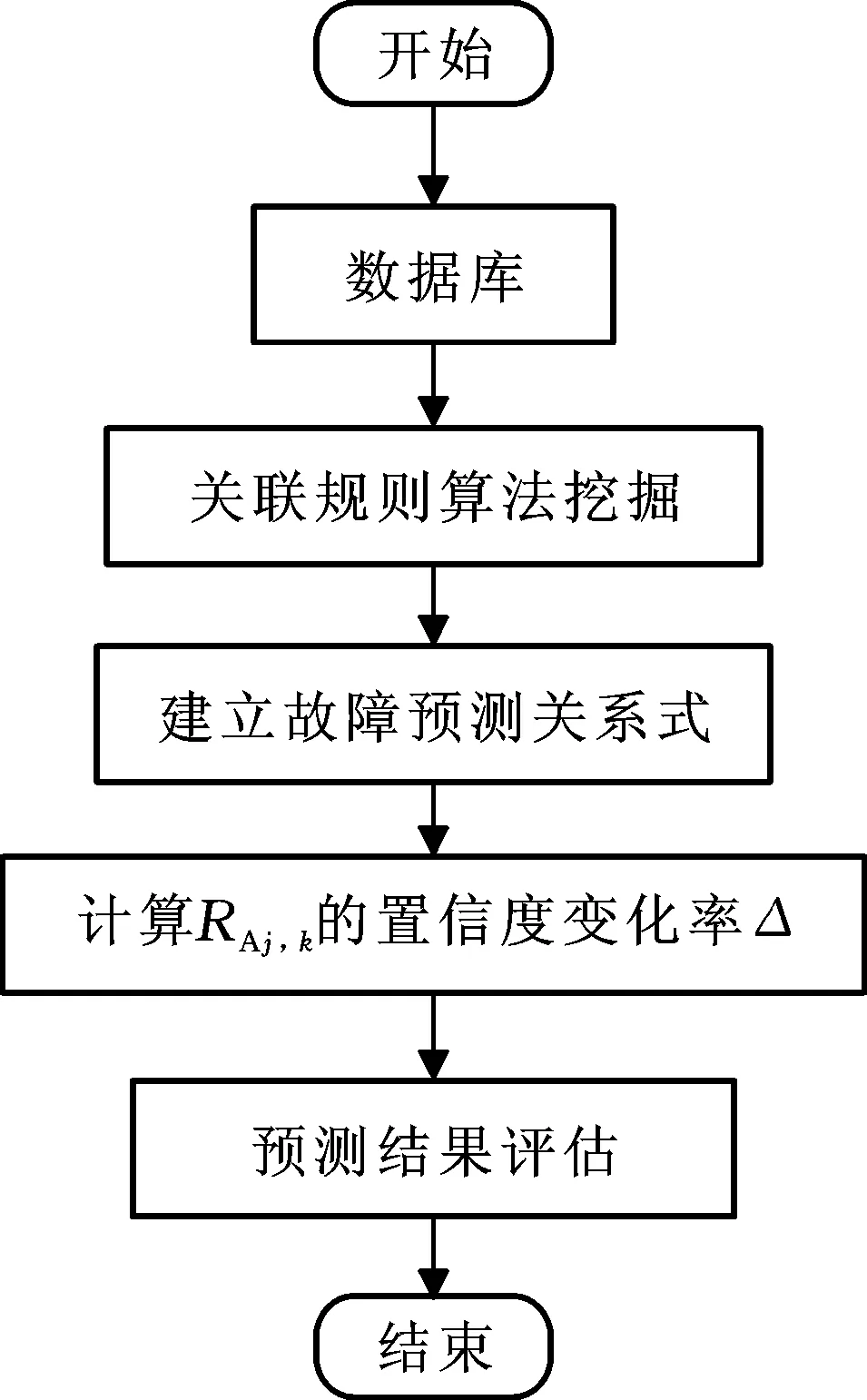
圖3 故障預(yù)測(cè)流程圖Fig.3 Flow chart of fault prediction
3 實(shí)例分析
3.1 監(jiān)測(cè)數(shù)據(jù)源
針對(duì)某港口1號(hào)橋式抓斗卸船系統(tǒng)布置狀態(tài)監(jiān)測(cè)傳感器,監(jiān)測(cè)布置點(diǎn)見表2。采用該監(jiān)測(cè)系統(tǒng)中2017年2~12月份的部分監(jiān)測(cè)數(shù)據(jù),每月選取500行數(shù)據(jù),共5 000行,作為數(shù)據(jù)挖掘的數(shù)據(jù)源。橋式抓斗卸船機(jī)機(jī)械狀態(tài)在線監(jiān)測(cè)的主要內(nèi)容是四卷筒系統(tǒng)、變幅系統(tǒng)及大車運(yùn)行系統(tǒng)中驅(qū)動(dòng)電機(jī)和減速器的振動(dòng),金屬結(jié)構(gòu)系統(tǒng)中大梁、小門架等金屬結(jié)構(gòu)受力和軌道、大梁及小門架振動(dòng)。為全面監(jiān)測(cè)卸船機(jī)的機(jī)械狀態(tài),在卸船機(jī)主要位置布置了37個(gè)傳感測(cè)點(diǎn),這些測(cè)點(diǎn)按監(jiān)測(cè)點(diǎn)位置分成5組:第Ⅰ組監(jiān)測(cè)四卷筒系統(tǒng)驅(qū)動(dòng)電機(jī)、減速器的振動(dòng);第Ⅱ組監(jiān)測(cè)變幅系統(tǒng)驅(qū)動(dòng)電機(jī)和減速箱的振動(dòng);第Ⅲ組監(jiān)測(cè)大車運(yùn)行系統(tǒng)驅(qū)動(dòng)電機(jī)和減速器的振動(dòng);第Ⅳ組監(jiān)測(cè)金屬結(jié)構(gòu)系統(tǒng)中大梁、小門架及軌道上的振動(dòng)與沖擊;第Ⅴ組監(jiān)測(cè)大梁、小門架等金屬結(jié)構(gòu)的受力情況。(X向:小車運(yùn)行方向;Y向:垂直方向;Z向:大車運(yùn)行方向)橋式抓斗卸船機(jī)機(jī)械狀態(tài)用各監(jiān)測(cè)點(diǎn)測(cè)量的特征值表示。通過時(shí)域分析方法處理振動(dòng)信號(hào)的原始數(shù)據(jù),獲得各驅(qū)動(dòng)電機(jī)、減速箱及金屬結(jié)構(gòu)振動(dòng)的振動(dòng)強(qiáng)度特征值,大梁及拉桿等金屬結(jié)構(gòu)的受力狀態(tài)用應(yīng)力值表示。卸船機(jī)機(jī)械狀態(tài)在線監(jiān)測(cè)過程中會(huì)產(chǎn)生海量的卸船機(jī)動(dòng)態(tài)數(shù)據(jù),這些數(shù)據(jù)將作為卸船機(jī)故障預(yù)測(cè)研究的數(shù)據(jù)源。

表2 卸船機(jī)監(jiān)測(cè)點(diǎn)布置說明
3.2 關(guān)聯(lián)規(guī)則挖掘
為使對(duì)橋式抓斗卸船機(jī)狀態(tài)監(jiān)測(cè)數(shù)據(jù)的關(guān)聯(lián)規(guī)則挖掘更有針對(duì)性,選擇狀態(tài)監(jiān)測(cè)中組Ⅰ、組Ⅱ、組Ⅲ和組Ⅴ的監(jiān)測(cè)點(diǎn)數(shù)據(jù)作為關(guān)聯(lián)規(guī)則的左側(cè),組Ⅳ中的數(shù)據(jù)作為關(guān)聯(lián)規(guī)則的右側(cè)。首先,將采用的數(shù)據(jù)進(jìn)行預(yù)處理,排除卸船機(jī)停機(jī)時(shí)和異常狀況下(包括惡劣天氣、設(shè)備故障)的異常數(shù)據(jù),通過改進(jìn)的Apriori算法挖掘,獲得表3所示的A9監(jiān)測(cè)點(diǎn)振動(dòng)烈度的部分?jǐn)?shù)據(jù)聚類結(jié)果,振動(dòng)強(qiáng)度數(shù)值將分為4類離散數(shù)據(jù),從而將數(shù)值型數(shù)據(jù)轉(zhuǎn)化為布爾型關(guān)聯(lián)規(guī)則挖掘;然后,利用其算法通過支持度和置信度閾值采掘以及興趣度閾值過濾輸出關(guān)聯(lián)規(guī)則,考慮到實(shí)時(shí)采集數(shù)據(jù)和卸船機(jī)工作的特點(diǎn),設(shè)定最小支持度為10.0%,最小置信度為50.0%,最小興趣度為1.5;最后,分別篩選獲取能表征四卷筒系統(tǒng)、變幅系統(tǒng)及大車運(yùn)行系統(tǒng)機(jī)械狀態(tài)的關(guān)聯(lián)規(guī)則,部分關(guān)聯(lián)規(guī)則見表4~表6。
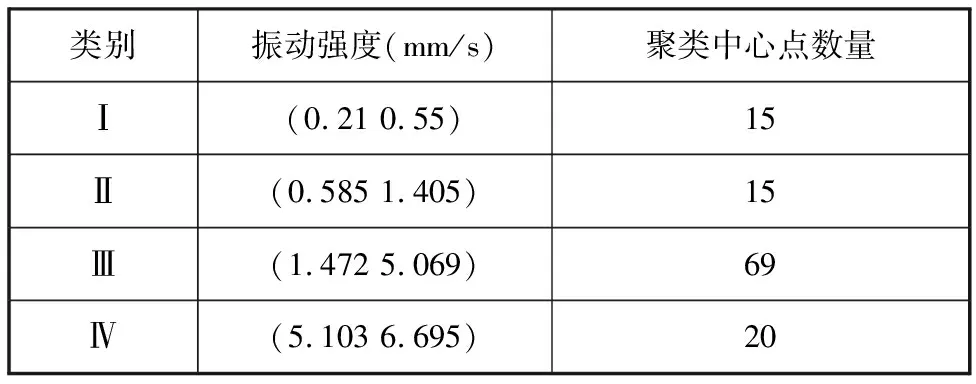
表3 A9監(jiān)測(cè)點(diǎn)數(shù)據(jù)聚類結(jié)果
表4部分關(guān)聯(lián)規(guī)則是采用組Ⅰ和組Ⅴ獲取的監(jiān)測(cè)數(shù)據(jù)對(duì)四卷筒中小車運(yùn)行狀態(tài)的規(guī)則挖掘,由表4分析,規(guī)則1和8分別代表開閉和小車電機(jī)同時(shí)運(yùn)作時(shí)的模式。規(guī)則2和7代表起升和小車電機(jī)共同運(yùn)行時(shí)的模式。規(guī)則4為三者電機(jī)同時(shí)運(yùn)作時(shí)的模式。規(guī)則3、5和6分別代表小車、起升和開閉電機(jī)單獨(dú)運(yùn)行時(shí)的模式。
表5部分關(guān)聯(lián)規(guī)則是采用組Ⅱ和組Ⅴ獲取的監(jiān)測(cè)數(shù)據(jù)對(duì)變幅系統(tǒng)運(yùn)行狀態(tài)的規(guī)則挖掘,由表5分析,規(guī)則1代表變幅電機(jī)單獨(dú)運(yùn)作時(shí)的模式。規(guī)則2代表整個(gè)變幅系統(tǒng)共同運(yùn)作時(shí)的模式。規(guī)則3代表大梁變幅升降減速時(shí)的模式。

表4 四卷筒系統(tǒng)部分關(guān)聯(lián)規(guī)則
注:表中S、C、I變量分別表示支持度、置信度和興趣度的數(shù)值。括號(hào)內(nèi)數(shù)據(jù)區(qū)間單位為mm/s。不再贅述。
表6部分關(guān)聯(lián)規(guī)則是采用組Ⅲ和組Ⅴ獲取的監(jiān)測(cè)數(shù)據(jù)對(duì)大車運(yùn)行系統(tǒng)運(yùn)行狀態(tài)的規(guī)則挖掘,由表6分析,規(guī)則1和2分別代表大車1號(hào)和2號(hào)電機(jī)單獨(dú)運(yùn)作時(shí)的模式。規(guī)則3表示大車減速運(yùn)行過程中的模式。規(guī)則4代表大車運(yùn)行系統(tǒng)整機(jī)共同運(yùn)作時(shí)的模式。

表5 變幅系統(tǒng)部分關(guān)聯(lián)規(guī)則

表6 大車運(yùn)行系統(tǒng)部分關(guān)聯(lián)規(guī)則
3.3 故障預(yù)測(cè)
橋式抓斗卸船機(jī)的故障種類很多,本文依據(jù)現(xiàn)有研究成果及現(xiàn)場(chǎng)的故障信息反饋,將卸船機(jī)系統(tǒng)常見故障類型分為6種,見表7。
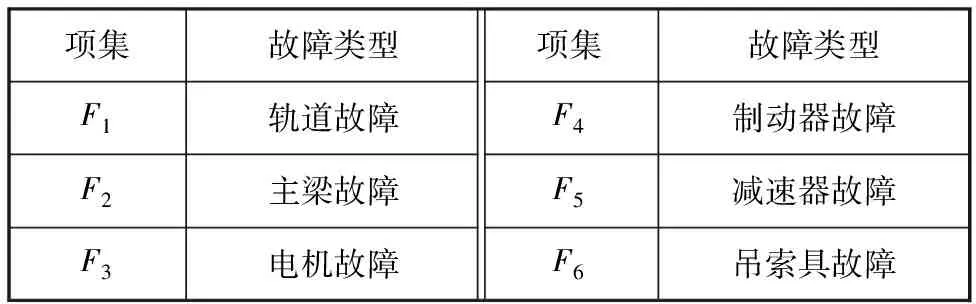
表7 卸船機(jī)的故障類型
橋式抓斗卸船機(jī)的狀態(tài)信息繁多,如果考慮所有狀態(tài)信息,故障預(yù)測(cè)體系將極為復(fù)雜,而且有些狀態(tài)信息模糊,不利于對(duì)卸船機(jī)進(jìn)行預(yù)測(cè)評(píng)估。本文選取具有代表性且能準(zhǔn)確有效反映卸船機(jī)運(yùn)行狀態(tài)的狀態(tài)參量作為表征卸船機(jī)各類故障類型的故障征兆。最終選取表8中的24個(gè)狀態(tài)參量作為故障征兆進(jìn)行狀態(tài)評(píng)估。

表8 卸船機(jī)的故障征兆
為了更明確地描述設(shè)備故障預(yù)測(cè)模型的實(shí)現(xiàn)過程,不失一般性,只給出小車運(yùn)行狀態(tài)故障預(yù)測(cè)分析,整理分析由某港口起重機(jī)械有限公司提供的關(guān)于小車運(yùn)行系統(tǒng)的部分歷史試驗(yàn)數(shù)據(jù)(表9)。

表9 小車系統(tǒng)歷史測(cè)試樣本數(shù)據(jù)
根據(jù)表9中故障類型所對(duì)應(yīng)的故障征兆的支持度,利用最小支持度閾值對(duì)其進(jìn)行簡(jiǎn)化,建立卸船機(jī)小車運(yùn)行系統(tǒng)故障類型與故障征兆的關(guān)聯(lián)關(guān)系,見表10。
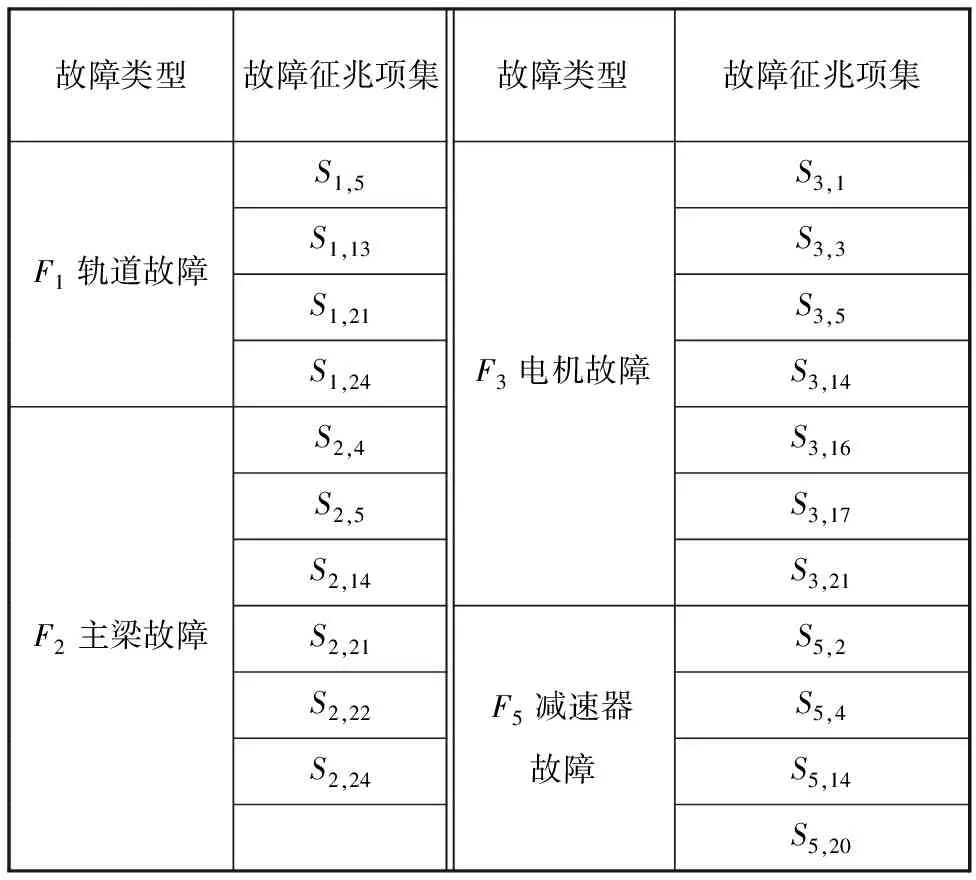
表10 故障類型與故障征兆的關(guān)聯(lián)關(guān)系
以下故障預(yù)測(cè)以小車運(yùn)行系統(tǒng)中“軌道故障”F1為故障預(yù)測(cè)實(shí)例,計(jì)算其對(duì)應(yīng)故障征兆的權(quán)重系數(shù)。記事務(wù)數(shù)據(jù)庫(kù)D1={軌道故障},且|D1|=|F1|=135,N1=4。故障征兆S1,5、S1,13、S1,21、S1,24在F1中的超標(biāo)次數(shù)分別為110, 120, 130, 103;在總樣本中的超標(biāo)次數(shù)分別為330, 126, 365, 190。由式(2)可得這4個(gè)故障征兆在軌道故障中的置信度:C1,5=33.3%,C1,13=95.2%,C1,21=35.6%,C1,24=54.2%。將計(jì)算得到的置信度代入式(4)可得相應(yīng)的權(quán)重系數(shù):w′1,5=0.153,w′1,13=0.436,w′1,21=0.163,w′1,24=0.248。
以上述F1為例,通過小車運(yùn)行系統(tǒng)關(guān)聯(lián)規(guī)則輸出表中關(guān)聯(lián)規(guī)則與故障征兆狀態(tài)參量之間的關(guān)系,建立故障征兆S1,1、S1,2、S1,3、S1,4(即S1,5、S1,13、S1,21、S1,24)與卸船機(jī)狀態(tài)關(guān)聯(lián)規(guī)則組之間的關(guān)系,并利用權(quán)重計(jì)算式(5)計(jì)算其權(quán)重系數(shù),見表11。
選取“軌道故障”F1發(fā)生前一個(gè)月的歷史數(shù)據(jù)作為實(shí)驗(yàn)驗(yàn)證數(shù)據(jù),通過RA數(shù)值波動(dòng)圖,其中RA3((A9,A10,S2,S3)?D4)關(guān)聯(lián)規(guī)則部分?jǐn)?shù)據(jù)波動(dòng)如圖4所示,分別計(jì)算表11對(duì)應(yīng)的標(biāo)準(zhǔn)關(guān)聯(lián)規(guī)則的置信度變化率,見表12,通過判斷標(biāo)準(zhǔn)關(guān)聯(lián)規(guī)則的穩(wěn)定性,獲得反映卸船機(jī)狀態(tài)的改變程度,根據(jù)現(xiàn)場(chǎng)故障信息反饋以及經(jīng)驗(yàn)知識(shí),設(shè)定故障預(yù)測(cè)函數(shù)閾值為30%。將表12中置信度變化率代入故障預(yù)測(cè)函數(shù)式(6),求得F1的故障預(yù)測(cè)
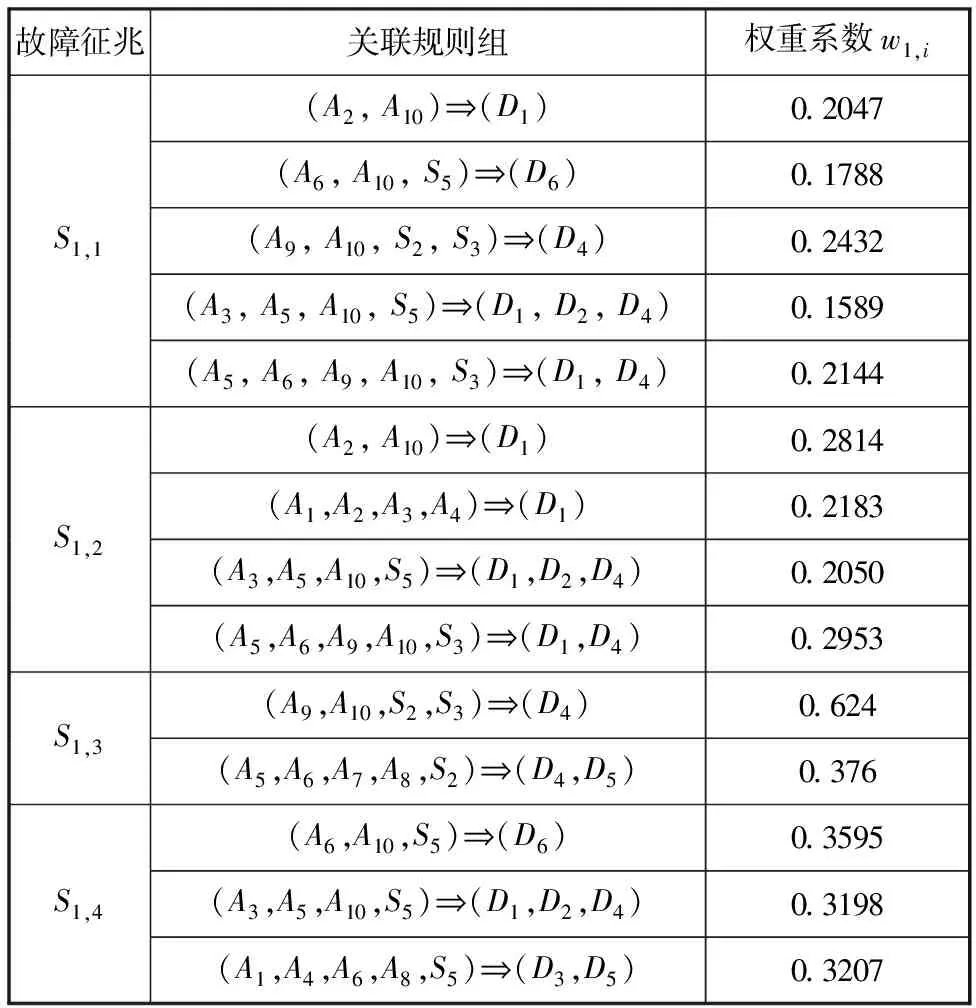
表11 故障征兆與關(guān)聯(lián)規(guī)則組權(quán)重系數(shù)表
函數(shù)值為36.865%,其函數(shù)值大于設(shè)定故障預(yù)測(cè)閾值,可實(shí)現(xiàn)故障預(yù)測(cè)。

圖4 RA3數(shù)值波動(dòng)圖Fig.4 RA3 numerical wave diagram
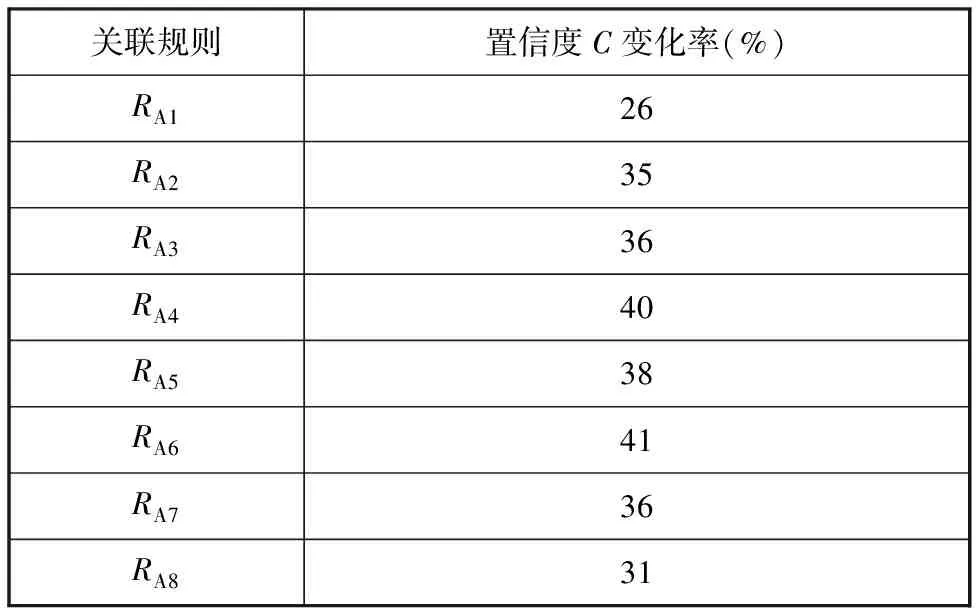
關(guān)聯(lián)規(guī)則置信度C變化率(%)RA126RA235RA336RA440RA538RA641RA736RA831
“軌道故障”F1故障預(yù)測(cè)只是其中一個(gè)故障案例,不失一般性,其他故障類型同樣可以用相同的權(quán)重興趣度關(guān)聯(lián)規(guī)則預(yù)測(cè)方法對(duì)橋式抓斗卸船機(jī)故障類型進(jìn)行預(yù)測(cè),實(shí)驗(yàn)結(jié)果表明,該方法可有效地預(yù)測(cè)故障發(fā)生前的故障信息變化狀態(tài),以便提前做出技術(shù)處理,避免故障發(fā)生,對(duì)提高企業(yè)的經(jīng)濟(jì)效益具有現(xiàn)實(shí)意義。
4 結(jié)論
(1)采用興趣度關(guān)聯(lián)規(guī)則算法獲取能夠表征卸船機(jī)狀態(tài)特征的關(guān)聯(lián)規(guī)則,通過計(jì)算支持度、置信度和興趣度,分別得到卸船機(jī)故障類型和故障征兆狀態(tài)量的權(quán)重系數(shù)、故障征兆和規(guī)則組的關(guān)聯(lián)耦合關(guān)系以及權(quán)重系數(shù),一定程度上避免了專家意見或經(jīng)驗(yàn)的主觀性的問題;利用上述兩兩參數(shù)間的權(quán)重系數(shù)構(gòu)建卸船機(jī)故障預(yù)測(cè)函數(shù)模型,通過實(shí)際關(guān)聯(lián)規(guī)則狀態(tài)變化的對(duì)比捕捉早期微弱的機(jī)械故障狀態(tài)變化信息。
(2)實(shí)例分析結(jié)果表明,多種數(shù)據(jù)分析方法的融合運(yùn)用能夠獲取較好的狀態(tài)評(píng)估和故障預(yù)測(cè)效果,并且在多故障問題的處理中也表現(xiàn)良好,具有較好的可預(yù)測(cè)性和準(zhǔn)確性。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
Coco薇(2017年11期)2018-01-03 20:59:57
讀者(2017年5期)2017-02-15 18:04:18
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
