表貼式永磁同步輪轂電機(jī)低速位置檢測研究
2019-11-04 09:04:04李偉力璩克旺曹君慈徐國卿張奕黃
電機(jī)與控制學(xué)報(bào) 2019年9期
李偉力 璩克旺 曹君慈 徐國卿 張奕黃

摘要:車用永磁電機(jī)轉(zhuǎn)子位置的準(zhǔn)確獲取,對于電機(jī)運(yùn)行的控制精度和車輛運(yùn)行的安全、舒適性具有重要的作用,針對電機(jī)啟動、低速運(yùn)行階段轉(zhuǎn)子位置檢測的精確度還不夠理想的問題,提出一種新的永磁同步電機(jī)啟動到低速階段轉(zhuǎn)子位置檢測方法,給出基于磁場相等原理的d-q旋轉(zhuǎn)參考坐標(biāo)系下直軸和交軸電感與定子三相電感之間的關(guān)系,通過測量定子三相電感,計(jì)算相應(yīng)的恒定分量和二次諧波分量,得到相應(yīng)的d-q軸下的電感值用于矢量控制。搭建輪轂電機(jī)的實(shí)驗(yàn)測試平臺,給出從啟動到低速位置的檢測輸出結(jié)果和角度誤差值,對靜止?fàn)顟B(tài)下、負(fù)載情況下的角度誤差進(jìn)行對比分析,實(shí)驗(yàn)結(jié)果驗(yàn)證了所提方法的準(zhǔn)確性,對于指導(dǎo)該類型電機(jī)低速下位置檢測方法提供了一定的理論支撐。
關(guān)鍵詞:表貼式永磁同步電機(jī);位置檢測;無傳感器;相移脈沖寬度調(diào)制;矢量控制
DOI:10.15938/j.emc.2019.09.003
Position detection for surface mounted permanent magnet??synchronous wheel motor at low speed
LI Wei?li1,QU Ke?wang1,CAO Jun?ci1,XU Guo?qing2,ZHANG Yi?huang1
(1.School of Electrical Engineering,Beijing Jiaotong University, Beijing 100044,China;
2.School of Mechatronic Engineering and Automation,Shanghai University, Shanghai 200444,China)
Abstract:
Accurate rotor position of permanent magnet motor for vehicle plays an important role in the control accuracy and the safety and comfort of vehicle operation. A new permanent magnet synchronous motor position detection method was proposed on the problem that the accuracy of rotor position detection was not ideal standstill and low?speed.The relationship was given between the three?phase inductance of the stator and the inductance of the d axis and the q axis in the d?q rotating reference frame based on the principle of magnetic field equality. By measuring the three?phase inductance of the stator, the corresponding constant component and the second harmonic component were calculated, and the inductance value under the corresponding d?q axis was obtained for vector control. The experimental test platform of hub motor was built, and the output results and angle errors from start to low speed were given. The angle errors at standstill and in load conditions were compared and analyzed. The experimental results verify the accuracy of the proposed method, which provides guidance for the position detection method of this type of motor at low speed.
Keywords:surface?mounted permanent magnet synchronous motor; position detection; sensor less; phase?shifted pulse width modulation; vector control
0引言
目前,電動汽車和軌道車輛上使用的永磁電機(jī)都采用位置傳感器獲得的轉(zhuǎn)子位置信息來實(shí)現(xiàn)系統(tǒng)運(yùn)行的穩(wěn)定性。由于轉(zhuǎn)子位置傳感器的安裝結(jié)構(gòu)和輸出引線等,不僅會增加結(jié)構(gòu)的復(fù)雜性和需求成本,同時也增大了體積,并且會造成隱患,一旦位置信息傳輸出現(xiàn)問題,車輛將無法運(yùn)行。為了開發(fā)可靠的永磁同步電機(jī)(permanent magnet synchronous motor,PMSM)無傳感器控制策略,人們進(jìn)行了大量的研究工作進(jìn)行低成本位置檢測方法研究。
最常用的位置檢測是基于具有轉(zhuǎn)子磁鏈位置估計(jì)的反電動勢,雖然卡爾曼濾波器、擴(kuò)展卡爾曼濾波器和一些新的擴(kuò)展反電動勢方法將轉(zhuǎn)速應(yīng)用范圍降到更低,但由于反電動勢太低,轉(zhuǎn)子磁通估計(jì)結(jié)果對測量噪聲和參數(shù)誤差非常敏感,故在非常低的速度時容易出現(xiàn)錯誤。模型參考自適應(yīng)估算法基于穩(wěn)定性理論設(shè)計(jì),系統(tǒng)的漸進(jìn)收斂性由Lyapunov方程和Popov的超穩(wěn)定性理論保證 ,保證了參數(shù)估算的漸進(jìn)收斂性,但這種位置估算法的估算精度跟參考模型本身的選取有關(guān)。
近十年來,研究者已經(jīng)提出了各種方法來使控制性能取得進(jìn)展,主要集中在利用高頻信號成份法估算轉(zhuǎn)子的位置信息,即信號注入方法。信號被注入定子電壓或電流,適用于具有轉(zhuǎn)子凸極性的內(nèi)置式PMSM。然而,需要特殊的信號處理方法將可用信號與檢測到的噪聲進(jìn)行分離。對于表貼式PMSM,在靜止?fàn)顟B(tài)和超低轉(zhuǎn)速下,由于它的凸極性較小,采用以上方法很難進(jìn)行位置檢測。對表貼式永磁同步電機(jī)在靜止位置時的位置和磁極檢測方法做了相應(yīng)的研究工作。
在高速情況下的轉(zhuǎn)子位置檢測已經(jīng)比較成熟,目前已經(jīng)應(yīng)用于一些運(yùn)行在高速狀態(tài)的產(chǎn)品,如風(fēng)機(jī)和水泵等產(chǎn)品中,部分也用于平衡車中。在低速和靜止等狀態(tài)下,也有相關(guān)的研究和理論成果,目前主要應(yīng)用于小功率電動工具中,并且主要針對內(nèi)置式電機(jī),對電機(jī)要求較高。對表貼式電機(jī)的靜止和低速狀態(tài)下的位置檢測目前沒有很大的進(jìn)展,本文主要是針對表貼式永磁同步電機(jī)在靜止和低速狀態(tài)下的轉(zhuǎn)子位置進(jìn)行研究,由于研究的基礎(chǔ)是基于電機(jī)三相電感與轉(zhuǎn)子之間關(guān)系進(jìn)行轉(zhuǎn)子位置的檢測,所以研究成果也可以應(yīng)用于內(nèi)置式電機(jī)。
文獻(xiàn)對靜止位置時的位置和磁極檢測方法做了相應(yīng)的研究工作并進(jìn)行了詳細(xì)的表述。本文將在原來方法的基礎(chǔ)上,進(jìn)一步對啟動和低速運(yùn)行狀態(tài)下的位置檢測做進(jìn)一步深入地研究和分析。通過將永磁電機(jī)的自感和互感數(shù)據(jù)測試進(jìn)行分析,驗(yàn)證低速位置檢測理論的正確性,并在不同參考坐標(biāo)系下,基于磁場相等原理推導(dǎo)出直軸和交軸電感與定子三相電感之間的關(guān)系,通過測量定子三相電感,計(jì)算相應(yīng)的恒定分量和二次諧波分量及相應(yīng)的d-q軸坐標(biāo)系下的電感值用于矢量控制,進(jìn)行低速狀態(tài)下的啟動和運(yùn)行研究。通過實(shí)驗(yàn)對低速下的位置檢測方法進(jìn)行驗(yàn)證,最后通過實(shí)驗(yàn)給出相應(yīng)的結(jié)果,驗(yàn)證了理論的正確性。
1基于電機(jī)電感的轉(zhuǎn)子位置檢測
基于中性點(diǎn)電壓方程的載波移相位置檢測方法可以得到以下含轉(zhuǎn)子位置信息的表達(dá)式。文獻(xiàn)通過對電機(jī)不同狀態(tài)的暫態(tài)過程分析,通過暫態(tài)過程等效電路,采用電機(jī)三相自感和互感進(jìn)行理論研究,在靜止?fàn)顟B(tài)進(jìn)行試驗(yàn),采樣中性點(diǎn)電壓對相關(guān)數(shù)據(jù)進(jìn)行計(jì)算,通過對比分析,驗(yàn)證了理論的正確性。本文對該理論進(jìn)行延伸,把該位置檢測方法應(yīng)用到矢量控制中,對低速位置檢測進(jìn)行進(jìn)一步研究。圖1為基于載波移相方式下,逆變器脈沖寬度調(diào)制(pulse width modulation,PWM)的6種暫態(tài)圖。
對狀態(tài)5進(jìn)行分析,可以得到中點(diǎn)電壓方程為:
VAN=Ladiadt+Mabdibdt+Macdicdt,(1)
VBN=Mabdiadt+Lbdibdt+Mbcdicdt,(2)
VCN=Macdiadt+Mbcdibdt+Lcdicdt。(3)
對VAN進(jìn)行整理計(jì)算,得到VAN用電機(jī)自感和互感表示的電壓表達(dá)式為:
VAN=LA?Equivalent(diadt),(4)
LA?Equivalent=La+
Mab(Mbc+Mac-Mab-Lc)+Mac(Mab+Mbc-Mac-Lb)Lc-2Mbc+Lb。(5)
同理可以得到其他兩相VBN、VCN的表達(dá)式為:
La=Ls-Lslcos2θ,(6)
Lb=Ls-Lslcos(2θ+120°),(7)
Lc=Ls-Lslcos(2θ-120°),(8)
Mab=Ms+Mslcos(2θ-120°),(9)
Mbc=Ms+Mslcos2θ,(10)
Mac=Ms+Mslcos(2θ+120°)。(11)
將式(6)~式(11)帶入VAN、VBN、VCN表達(dá)式中,經(jīng)過整理計(jì)算可以得到相關(guān)的包含電機(jī)轉(zhuǎn)子位置信息的表達(dá)式為:
A=-VANVDC=LA-EquivalentLTotal?A≈YX+ZXcos2θ,(12)
B=-VBNVDC=LB-EquivalentLTotal?B≈?YX+ZXcos(2θ+120°),(13)
C=-VCNVDC=LC-EquivalentLTotal?C≈?YX+ZXcos(2θ-120°)。(14)
式中X、Y、Z分別為:
X=3(Ls+Ms)2-34(2Msl+Lsl)2,
Y=(2L2s+4MsLs-32MslLsl+2M2s-3M2sl),
Z=[(Ms+Ls)(Msl-Lsl)]。
本文對該理論進(jìn)行延伸,把該位置檢測方法應(yīng)用到矢量控制中,對低速位置檢測進(jìn)行進(jìn)一步研究。其中A、B、C是A相、B相和C相與直流母線電壓的比值,能夠得到相關(guān)的位置信息用于矢量控制。
1.1電機(jī)鐵損對自感和互感測試的影響
1.1.1含鐵損的電感和互感測試表達(dá)式
基于移相載波的位置檢測研究需要對電機(jī)的電感和互感進(jìn)行檢測,通過電壓電流測試的方法對電機(jī)的電感和互感進(jìn)行計(jì)算得出電機(jī)的三相自感和各相之間的互感。對電機(jī)的A相等效電路進(jìn)行分析,電機(jī)包含鐵損,表貼式PMSM等效電路如圖2所示,Va為電機(jī)A相電壓,Ra為A相繞組的內(nèi)阻,Ra1為A相等效鐵損電阻,La為A相的自感,ia、ia1、iLa2分別為A相電流、等效鐵損電流和電感電流等。A相矢量圖為以電感電流iLa2為參考的矢量圖。根據(jù)矢量圖,可以得出:
V2La=V2Ra+V2Ra1-2VRaVRa1cosθa,(15)
sinθa1=sinθaVLaVRa,(16)
iLa2=iasin(θa+θa1)。(17)
對式(15)~式(17)進(jìn)行整理,可以得到A相的自感和互感表達(dá)式為:
La=VLaωiLa2=VLa2πfiLa2,(18)
Mab=VbωiLa2=Vb2πfiLa2,(19)
Mac=VcωiLa2=Vc2πfiLa2。(20)
1.1.2忽略鐵損的電感和互感測試表達(dá)式
忽略鐵損后,電機(jī)的等效電路如圖3所示,相電壓表達(dá)式比較簡單,A相自感和互感表達(dá)式為:
V2a=(iaRa)2+(2πfLaia)2,(21)
La=V2a-(iaRa)22πfia,(22)
Mab=Vb2πfia,(23)
Mac=Vc2πfia。(24)
通過對2種不同的計(jì)算方式進(jìn)行對比分析和測試數(shù)據(jù)驗(yàn)證,鐵損對電機(jī)自感和互感的檢測計(jì)算影響較小,可以進(jìn)行忽略,在對電機(jī)的三相電感和互感進(jìn)行檢測計(jì)算采用忽略鐵損的方式進(jìn)行計(jì)算。
1.2電機(jī)三相電感和互感測試
本文分析的輪轂樣機(jī)參數(shù)如表1所示,其結(jié)構(gòu)如圖4所示。
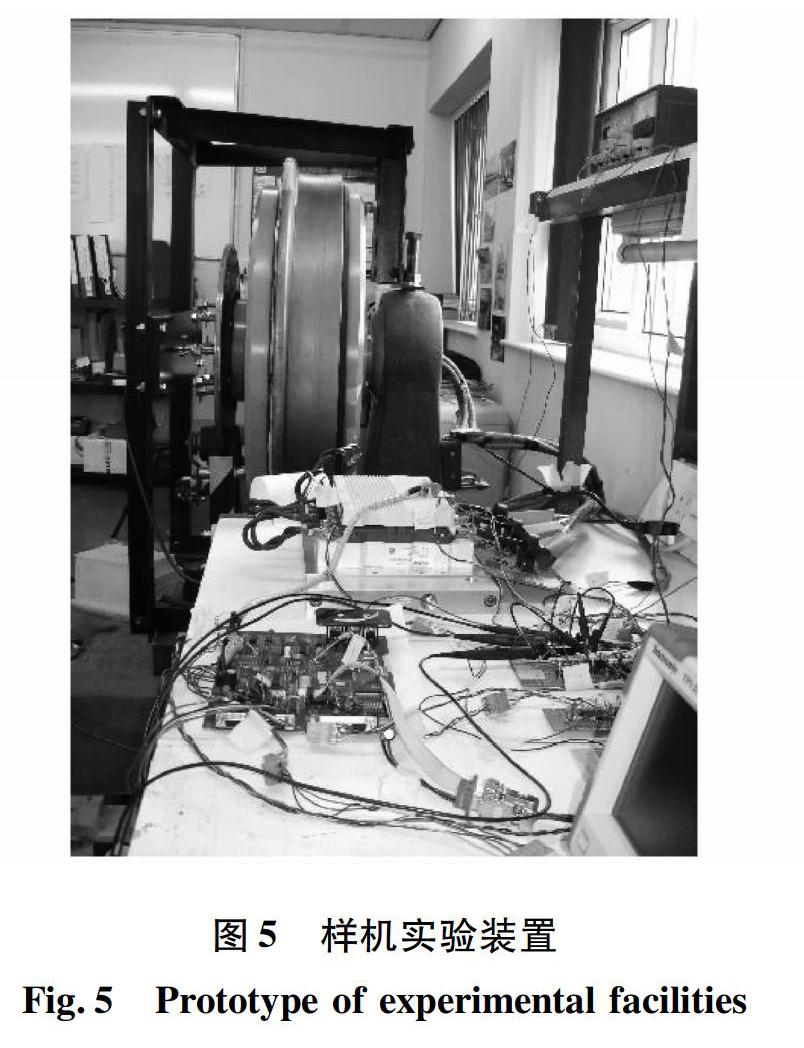
為了驗(yàn)證提出的分析方法和分析結(jié)果的準(zhǔn)確性,搭建了實(shí)驗(yàn)測試裝置如圖5所示。測試裝置實(shí)驗(yàn)采用72 V直流電池,Semikron Skiim IPM和60 kW表貼式PMSM輪轂電機(jī)實(shí)現(xiàn)。英飛凌XC161用作控制器,用于產(chǎn)生移相載波PWM并執(zhí)行位置檢測和控制方法。絕對位置傳感器采用絕對式編碼器輸出絕對位置用于位置檢測和實(shí)際位置的對比;機(jī)械刻度按照電機(jī)的磁極對數(shù)進(jìn)行電氣角度劃分,用于實(shí)驗(yàn)時,電機(jī)三相電感檢測以及分析三相電感與轉(zhuǎn)子位置之間的對應(yīng)關(guān)系;制動盤用來給系統(tǒng)加負(fù)載,進(jìn)行矢量控制分析。轉(zhuǎn)動螺桿用于對電機(jī)三相電感測試時與電機(jī)位置刻度分格進(jìn)行對應(yīng)。
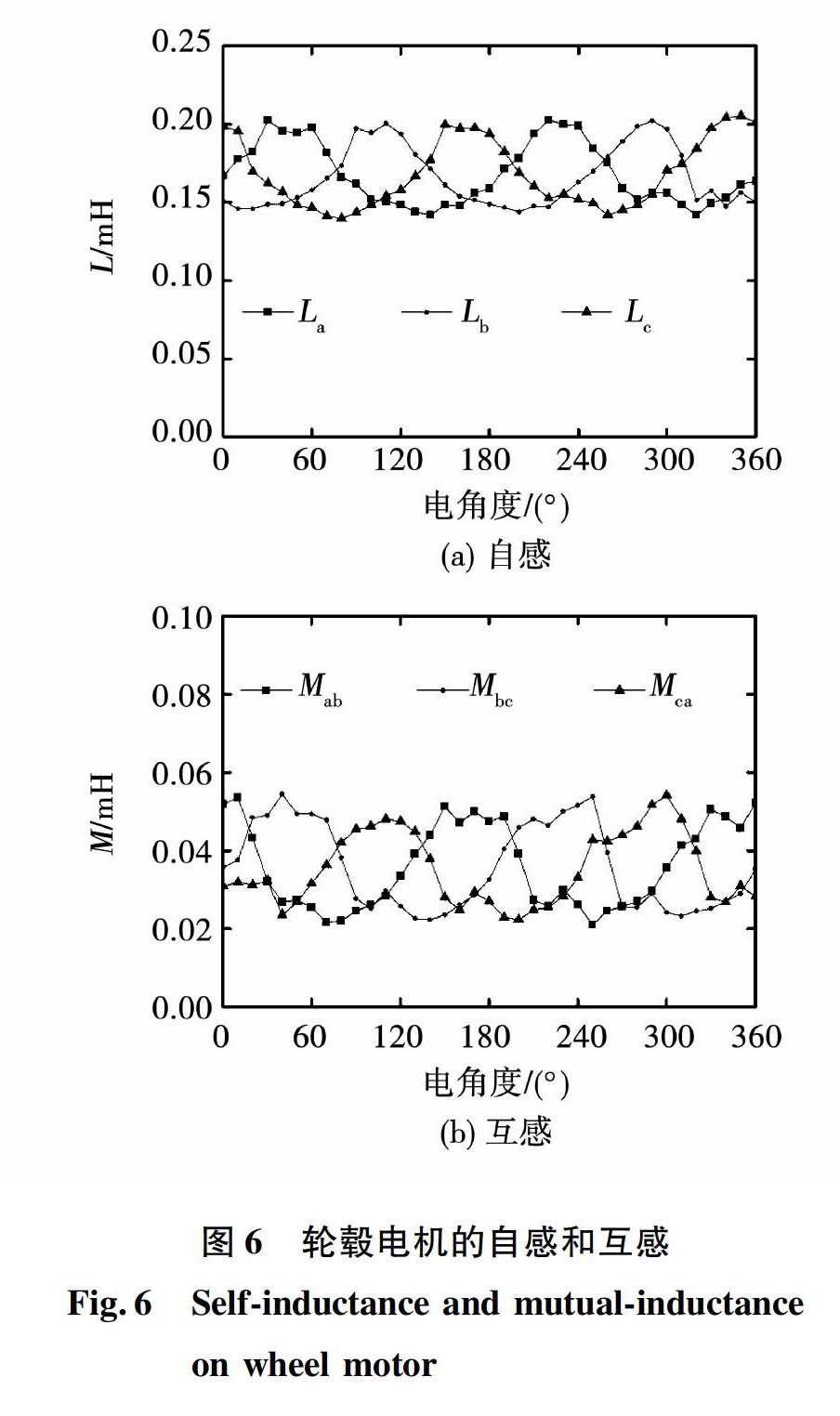
利用圖5所示實(shí)驗(yàn)平臺進(jìn)行測試,鎖定電機(jī)的轉(zhuǎn)子(輪轂)在不同的位置,對電機(jī)每一相施加10 A、50 Hz電流激勵,通過采樣該相電壓和其他兩相感應(yīng)的電壓,并通過式(11)~式(13)可以計(jì)算出電機(jī)在不同位置時的自感和互感,得到的測試數(shù)據(jù)如圖6所示。由于電感測試點(diǎn)及測試儀表的誤差,電感和互感測試數(shù)據(jù)會出現(xiàn)誤差,通過濾波處理,得到電感和互感相應(yīng)數(shù)值:Ls=0.173 8 mH,Lsl=0.071 6 mH,Ms=0.038 8 mH,Msl=0.031 5 mH。
中性點(diǎn)電壓比值式(12)~式(14)可以通過運(yùn)行中不同轉(zhuǎn)子位置的中性點(diǎn)電壓采樣和靜止時不同轉(zhuǎn)子位置的電感值計(jì)算得到,把所測試不同轉(zhuǎn)子位置永磁同步電機(jī)三相的自感和互感數(shù)據(jù)Ls、Lsl、Ms、Msl等數(shù)值代入式(12)~式(14),可以計(jì)算出相應(yīng)的中性點(diǎn)電壓比值與轉(zhuǎn)子的對應(yīng)關(guān)系曲線如圖7所示。可以看出,中性點(diǎn)電壓比值之間相位互差120°,包含轉(zhuǎn)子位置信息。從計(jì)算得到的結(jié)果可以看出,式(1)~式(11)理論推導(dǎo)的正確性及式(12)~式(14)理論結(jié)果的正確性,可以用于永磁電機(jī)轉(zhuǎn)子位置評估。實(shí)驗(yàn)中采用該理論,對中性點(diǎn)電壓位置檢測評估方法做進(jìn)一步實(shí)驗(yàn)驗(yàn)證,驗(yàn)證該方案的可行性和實(shí)用性。
2基于磁場恒定的電感轉(zhuǎn)換
根據(jù)三相磁場與d-q旋轉(zhuǎn)參考坐標(biāo)系下的磁場平衡原理方程為
ψd?ψq?ψ0=Pψa?ψb?ψc。(25)
其中:
P=23cosθrcos(θr-2π3)cos(θr+2π3)?-sinθr-sin(θr-2π3)-sin(θr+2π3)?121212,
P-1=cosθr-sinθr1?cos(θr-2π3)-sin(θr-2π3)1?cos(θr+2π3)-sin(θr+2π3)1。
電感采用磁場與電流的關(guān)系可以表示為
L=ψi。(26)
根據(jù)三相磁場與d-q旋轉(zhuǎn)參考坐標(biāo)系下的磁場平衡原理,d-q旋轉(zhuǎn)參考坐標(biāo)系下的電感通過式(25)整理后可表示為
Ld?Lq?Ldq0=Pψa?ψb?ψci(a,b,c)-1P-1=PL(a,b,c)P-1。(27)
經(jīng)過進(jìn)一步的整理和推導(dǎo),可以得到電機(jī)的自感和互感分別用二次諧波分量公式的簡化表示式為
Ld?Lq?Ldq0=Ls-12Lsl+Ms-Msl?Ls+12Lsl+Ms+Msl?Ls-2Ms。(28)
式(28)給出了三相電感的自感和互感的恒定分量和二次諧波分量與交軸電感、直軸電感的關(guān)系,通過測試定子繞組的自感和互感,進(jìn)行相應(yīng)的計(jì)算,可以得到相應(yīng)的矢量控制中所使用的電感值,用于從啟動到低速的矢量控制。
3位置檢測結(jié)果驗(yàn)證
通過上面所測試的電感數(shù)據(jù)驗(yàn)證了靜態(tài)下,轉(zhuǎn)子位置與中性點(diǎn)電壓比值關(guān)系,下面將進(jìn)一步通過所測試的電感數(shù)據(jù)應(yīng)用于矢量控制中,通過采樣中性點(diǎn)電壓進(jìn)行計(jì)算,進(jìn)一步分析和驗(yàn)證理論的可行性。中性點(diǎn)電壓信號在分壓電阻的直流母線電壓的中性線和負(fù)極之間提取。在一個相移PWM周期中,中性點(diǎn)電壓可以在上升沿進(jìn)行三次采樣,采樣的數(shù)據(jù)與采到的直流電壓進(jìn)行比值計(jì)算,得到轉(zhuǎn)子與角度相應(yīng)的對應(yīng)關(guān)系。
圖8給出了系統(tǒng)矢量控制時的各部分功能,主要包括中性點(diǎn)電壓采樣、角度位置計(jì)算和矢量轉(zhuǎn)換、矢量控制等幾部分內(nèi)容。計(jì)算得出的角度值通過查表等方式得到矢量控制所用的相關(guān)正弦和余弦值用于矢量轉(zhuǎn)換計(jì)算。
3.1啟動過程研究
圖9給出了從靜止到低速(0.87 Hz)的輸出位置檢測。從靜止到低速(0.87 Hz)的角度誤差如圖10所示,最大角度誤差小于10°電角度。
以上位置檢測轉(zhuǎn)子位置信息應(yīng)用于矢量控制中,可以通過下面的電流等輸出結(jié)果給出。圖11為電機(jī)矢量控制采樣的三相電流輸出。
圖12給出了電機(jī)從靜止開始啟動的過程,電機(jī)轉(zhuǎn)矩控制id和iq值。電機(jī)電流大體上是常數(shù)值,輸出電流控制的結(jié)果有一點(diǎn)小的波動,主要是因?yàn)椴蓸拥恼`差和位置評估誤差引起的。由于裝置中負(fù)載加載方式以及安全因素,轉(zhuǎn)矩給定值和供電電源值較低,該實(shí)驗(yàn)裝置主要用于理論研究和實(shí)驗(yàn)驗(yàn)證。
在提出的位置檢測方法中使用相對比較有明顯的優(yōu)勢。檢測不需要電感的絕對值,因此應(yīng)該對測量誤差和條件變化有很強(qiáng)的魯棒性。不需要電流測量或高頻信號的注入。直流母線電壓的測量也不需要,因?yàn)闄z測是基于三個電壓之間的相對值進(jìn)行比較,實(shí)現(xiàn)比較方便簡單。此外,無論是以自感為主、互感為主,還是兩者的組合,只要條件明確,就適用于不同場景中的位置檢測。
4結(jié)論
本文介紹了采用載波相移PWM技術(shù)對表貼式PMSM進(jìn)行位置檢測的詳細(xì)研究。該方法在理論上給出了中性點(diǎn)電壓的詳細(xì)分析。
1)通過對被測電機(jī)自感和互感的數(shù)據(jù)檢測以及將電機(jī)電感數(shù)據(jù)代入理論公式,得到相關(guān)理論輸出的比值,對相關(guān)理論進(jìn)行了驗(yàn)證。
2)通過磁場恒定的原理,推導(dǎo)出三相電感自感和互感的恒定分量和二次諧波分量與交軸電感、直軸電感的關(guān)系,通過測試定子繞組的自感和互感,進(jìn)行相應(yīng)的計(jì)算,可以得到相應(yīng)的矢量控制中所使用的電感值,用于從啟動到低速的矢量控制。
3)角度差值為絕對位置傳感器輸出與位置檢測方法中輸出值之間的差值。
該位置檢測方法實(shí)現(xiàn)簡單,可以節(jié)省控制器的內(nèi)部資源。實(shí)驗(yàn)結(jié)果的正確性對文中的理論進(jìn)行了驗(yàn)證。
參 考 文 獻(xiàn):
[1]JOHONSON J P, EHSANI M,GUZELGUNLER Y. Review of sensorless methods for brushless DC// Conference Record of the 1999 IEEE Industry Applications Conference, October 3-7,1999, Phoenix, USA.1999:143-150.
PARASILITI F, PETRELLA R, TURSINI M. Sensorless speed control of a PM synchronous motor based on sliding mode observer and extended Kalman filter//Proceedings of the Thirty Sixth IEEE?IAS Annual Meeting, September 30?October 4,2001, Chicago,USA.2001:533-540.
BOLOGNANI S, OBOE R,ZIGLIOTTO M. Sensorless full?digital PMSM drive with EKF estimation of speed and rotor position. IEEE Transactionsons Industrial Electronics, 1999, 46(1): 184.
劉剛,肖燁然,孫慶文.基于改進(jìn)反電勢積分的永磁同步電機(jī)位置檢測.電機(jī)與控制學(xué)報(bào),2016, 20(2): 37.
LIU Gang, XIAO Yeran, SUN Qingwen.Position detection of PMSM based on the improved back?EMF integration method.Electric Machines and Control, 2016, 20(2): 37.
KIM H, SON J, LEE J. A high?speed sliding?mode observer for the sensorless speed control of a PMSM.IEEE Transactions on Industrial Electronics,2011,58(9): 40696.
PONGAM S, SANGWONGWANICH S. Stability and dynamic performance improvement of adaptive full?order observers for sensorless PMSM drive.IEEE Transactions on Power Electronics, 2012, 27(2):588.
MAITI S, CHAKRABORTY C, SENGUPTA S. Simulation studies on model reference adaptive controller based speed estimation technique for the vector controlled permanent magnet synchronous motor drive. Simulation Modelling Practice and Theory,2009,17(4): 585.
SCHAUDER C. Adaptive speed identification for vector control of induction motors without rotational transducers.IEEE Transactions on Industry Applications, 1992, 28(5): 1054.
劉兵,周波,倪天恒,等.基于廣義二階積分器的表貼式永磁同步電機(jī)低速轉(zhuǎn)子位置檢測方法.電工技術(shù)學(xué)報(bào),2017, 32(23): 24.
LIU Bing, ZHOU Bo, NI Tianheng, et al. A novel position observer for SPMSM sensorless control based on second?order generalized integrators. Transactions of China Electrotechnical Society,2017, 32(23): 24.
JANG J H , SUL S K, HA J I, et al. Sensorless drive of SMPM motor by high frequency signal injection// Seventeenth Annual IEEE Applied Power Electronics Conference and Exposition,March 10-14,2002,Dallas, USA. 2002:279-285.
KANEKO D, IWAJI Y, SAKAMOTO K, et al. Initial rotor position estimation of the interior permanent magnet synchronous motor//Proceedings of the Power Conversion Conference?Osaka 2002,April 2-5,2002, Osaka, Japan.2002:259-264.
洪琨,劉剛,毛琨,等.基于新型高頻注入法的表貼式永磁同步電機(jī)轉(zhuǎn)子初始位置檢測方法.電工技術(shù)學(xué)報(bào),2018, 33(13): 2915.
HONG Kun, LIU Gang, MAO Kun,et al.Initial position detection of surface mounted permanent magnet synchronous machines based on novel high?frequency injection method. Transactions of China Electrotechnical Society,2018, 33(13): 2915.
秦峰,賀益康,劉毅,等.兩種高頻信號注入法的無傳感器運(yùn)行研究.中國電機(jī)工程學(xué)報(bào),2005, 25(5): 116.
QIN Feng, HE Yikang, LIU Yi, et al. Comparative investigation of sensorless control with two high?frequency signal injection schemes.Proceedings of the CSEE,2005, 25(5): 116.
CORLEY M J, LORENZ R D.Rotor position and velocity estimation for a permanent magnet synchronous machine at standstill and high speeds. IEEE Transactions on Industry Application,1998, 34(4): 784.
于艷君,柴鳳,高宏偉,等. 基于Anti?Windup控制器的永磁同步電機(jī)控制系統(tǒng)設(shè)計(jì).電工技術(shù)學(xué)報(bào),2009, 24(4): 66.
YU Yanjun, CHAI Feng, GAO Hongwei, et al. Design of PMSM system based on anti?windup controller. Transactions of China Electrotechnical Society,2009, 24(4): 66.
LINKE M, KENNEL R, HOLTZ J. Sensorless position control of permanent magnet synchronous machines without limitation at zero speed// IEEE 2002 28th Annual Conference of the Industrial Electronics Society, November 5-8, 2002, Sevilla, Spain.2002: 674-679.
王麗梅,鄭建芬,郭慶鼎. 基于載波注入的凸極永磁同步電動機(jī)無傳感器控制.電機(jī)與控制學(xué)報(bào),2005, 9(4): 333.
WANG Limei, ZHENG Jianfen, Guo Qingding. Sensorless control of salient?pole permanent magnet synchronous motor based on carrier signal injection. Electric Machines and Control, 2005, 9(4): 333.
KERESZTY T, LEPPANEN V M, LUOMI J. Sensorless control of surface magnet synchronous motors at low speeds using low?frequency signal injection// 29th Annual Conference of the IEEE Industrial Electronics Society,November 2-6,2003,Roanoke, USA. 2003:1239-1243.
CORLEY M, LORENZ R. Rotor position and velocity estimation for salient pole permanent magnet synchronous machine at standstill and high speed. IEEE Transactions on Industry Applications, 1998, 34(4):784.
QU Kewang, XU Guoqing, ZHOU Yimin, et al. A novel standstill position detection method of PMSM for electric vehicles based on carrier phase?shifted PWM technology //2014 IEEE 23rd International Symposium on Industrial Electronics, July 1-4, 2014,Istanbul, Turkey.2014:1594-1599.
MEI T X, QU Kewang, LI Hong. Control of wheel motors for the provision of traction and steering of railway vehicles. IET Power Electronics,2014, 7(9): 2279.
QU Kewang, CAO Junci, LI Weili, et al. PMSM low speed position detection on carrier phase?shifted PWM technology//IEEE Vehicle Power and Propulsion Conference, October 17-20, 2016,Hangzhou, China. 2016:1-6.
MEI T X, QU K W, WHITLEY M. Control of wheel motors for the provision of light rail traction and steering//UKACC International Control Conference on Control 2010, September 7-10,2010,Coventry, UK. 2010:710-715.
