6-UCU船舶運動模擬平臺的奇異位形研究與檢測
2019-10-30 01:26:46高國章
中國航海 2019年3期
關鍵詞:檢測
高國章, 高 凱, 高 嵐
(武漢理工大學 能源與動力工程學院, 武漢 430063)
船舶運動模擬平臺可模擬船舶在海浪中的六自由度搖晃運動,主要用于船員培訓和船舶設備測試,其結構主要是一個Stewart平臺。并聯機構[1]與串聯機構相比有動態響應快、剛度高、精度高及承載能力強等優點,然而,隨著并聯機構運用到各個領域,人們發現并聯機構存在一個很大的缺點,即在運行空間中存在著奇異。[2-3]當機構運行到某一空間中,其動態特性相對于全局性能發生的變化被稱為奇異。[4]當并聯機構處于奇異位形時,機構的自由度將會增加或減少:自由度增加會使機構變得不可控,容易對機構造成損壞;自由度減少會使機構無法達到所要的運行狀態,導致不能連續運作。為設計出在可達工作空間內或工作路徑中沒有奇異的船舶運動模擬平臺,應在設計過程中分析和檢測機構的奇異性。[5]
在對Stewart平臺進行奇異位形分析時,很多學者只考慮主動移動副對機構的影響,根據“輸入、輸出速度之間關系建立的雅克矩陣的行列式是否為0”來判斷機構是否存在奇異位形,但是只根據這一條件來研究機構的奇異位形并不充分,必須把被動副考慮進來。由于螺旋理論能很好地反映機構的運動特性和約束特性,因此被廣泛運用于并聯機構奇異位形的分析。[5]在1991年HUNT首先提出將螺旋理論運用到機構的奇異位形研究中。趙瑞杰等[6]將反螺旋系和矩陣知識結合在一起,得到并聯機構產生奇異的條件和奇異的類型。程銳[7]用螺旋理論得到并聯機構產生奇異的類型,并提出利用改變驅動位置的方法來消除奇異。蔡昀寧[8]運用螺旋理論找到并聯機構產生奇異的原因,并提出利用逆螺旋矩陣代替傳統雅克比矩陣來尋找機構的奇異的方法。ZHAO等[9]運用逆螺旋理論提出分析并聯機構奇異位形的方法,但沒有考慮主動移動副對機構的奇異產生的影響。ZHAO等[9]將螺旋理論和空間靜平衡理論結合在一起,提出一種末端約束對機構的奇異產生的影響,也同樣沒有考慮主動移動副對機構的奇異產生的影響。為正確地對機構的奇異性進行分析,本文把主動移動副和被動副虎克鉸都考慮進來,以螺旋理論為基礎,分析并聯機構產生奇異位形的條件。
事實上,能夠快速檢測并聯機構在可達工作空間運行時是否存在奇異位形是至關重要的。很多學者在對并聯機構進行奇異位形檢測時,經常采用的方法是對傳統的運動學雅克比矩陣進行分析,即只考慮主動移動副產生的奇異,并沒有把被動副鉸考慮進來。對于雙端虎克鉸六自由度船舶模擬平臺而言,為能更加全面地檢測到平臺的奇異位形,需要把被動虎克鉸考慮進來。本文將提出一種有效的奇異性檢測算法,最后通過相關實例分析驗證所提出的遺傳奇異檢測算法的有效性。
1 模擬平臺的奇異性分析
1.1 結構模型和坐標系的建立
雙端虎克鉸六自由度船舶運動模擬平臺簡稱6-UCU(U為虎克鉸,C為圓柱副)船舶運動模擬平臺,由上下平臺和6個連桿組成,見圖1。每個連桿都通過圓柱副用上虎克鉸(第i個上虎克鉸鉸點的中心,i=1,…,6)和下虎克鉸(第i個下虎克鉸鉸點的中心)分別與上下平臺連接。初始位置時上下平臺互相平行。在上下平臺的中心P和B兩點分別建立局部坐標系Pxyz和靜坐標系Bxyz,設P和B兩點坐標為(x,y,z)T和(0,0,0)T。Px和Bx軸的正方向分別取U1U2和D1D2的中垂線方向且指向平臺外部,Pz和Bz的正方向分別取垂直于上下平臺的方向且方向朝上,Py和By的方向根據右手規則確定。設上平臺位姿為(x,y,z,α,β,γ)T。
1.2 支路坐標系建立

圖1 機構空間結構
兩個螺旋的相逆只與兩個螺旋的參數有關,與原點的位置無關,即與坐標系的選擇無關。因此,為方便分析機構的奇異性,建立任一支路的局部坐標系見圖2,選擇以與下虎克鉸相連的連桿為z軸,與連桿相連的虎克鉸的軸線為x軸,y軸通過右手定則得到。局部坐標系可看作是由固定坐標系Bxyz通過兩次轉動變換得來的,固定坐標系先繞z軸轉動θ得到新坐標系Ux′y′z′,然后再繞x軸旋轉δ得到局部坐標系Ux″y″z″。支路的旋轉變換矩陣Rzx為
(1)
即沿連桿方向單位矢量為
(2)
式(1)和式(2)中:
zni=cosδi,
(3)

圖2 支路等效圖
由圖2可知:每個支路都滿足矢量方程
BDi+lini=BP+PUi
(4)
若已知點Di、點Ui、點P在固定坐標系中的坐標表示,通過聯合式(2)、式(3)和式(4)可求出ni,從而確定旋轉角度θi和δi,最后得到連桿在下平臺的投影夾角。
1.3 運動學奇異分析
將與固定平臺連接的下虎克鉸分解為兩個正交的螺旋$i1(i為機構的第i條支路,1為每個支路中的第1個單位運動螺旋)和$i2;圓柱副的運動可看作是移動副和旋轉副,因此,把圓柱副分解為節距為無窮大和節距為零的兩個單位運動螺旋$i3和$i4;將與運動平臺連接的上虎克鉸分解為兩個正交的螺旋$i5和$i6。每個支路都可以等效為以上6個單位運動螺旋,其中:$i3的節距為無窮大,對應著主動副;其余的5個運動螺旋節距都為零,對應著被動副。任一支路中的6個運動螺旋對應的Plücker坐標分別為
(5)
由圖2可知:沿x軸方向的虎克鉸軸線與另一條虎克鉸軸線和連桿都垂直,即
si1=si2×ri
(6)
若si2與ri共線,式(6)依然成立。因此,分兩種情況討論。
1)si2與ri共線,si6與ri不共線時
$i2=[001;000]
(7)
設si5=[mn0]
則si6=[-nmk]
(8)
得
(9)
因此,連桿DiUi的運動螺旋可表示為
$DiUi=[$i1$i2$i3$i4$i5$i6]
(10)

(11)
此時在第i個支路中存在著約束力螺旋通過Ui點,方向與固定在連桿上的下虎克鉸軸線平行,見圖3。
2)si2與ri不共線,si6與ri共線時
(12)
設si5=[mn0]
則$i5=[mn0;-nlml0]
(13)
此時得到

圖3 支路中下虎克鉸產生的奇異

(14)
在第i個支路中存在著約束力螺旋通過Di點,方向與固定在連桿上的上虎克鉸軸線平行,見圖4。
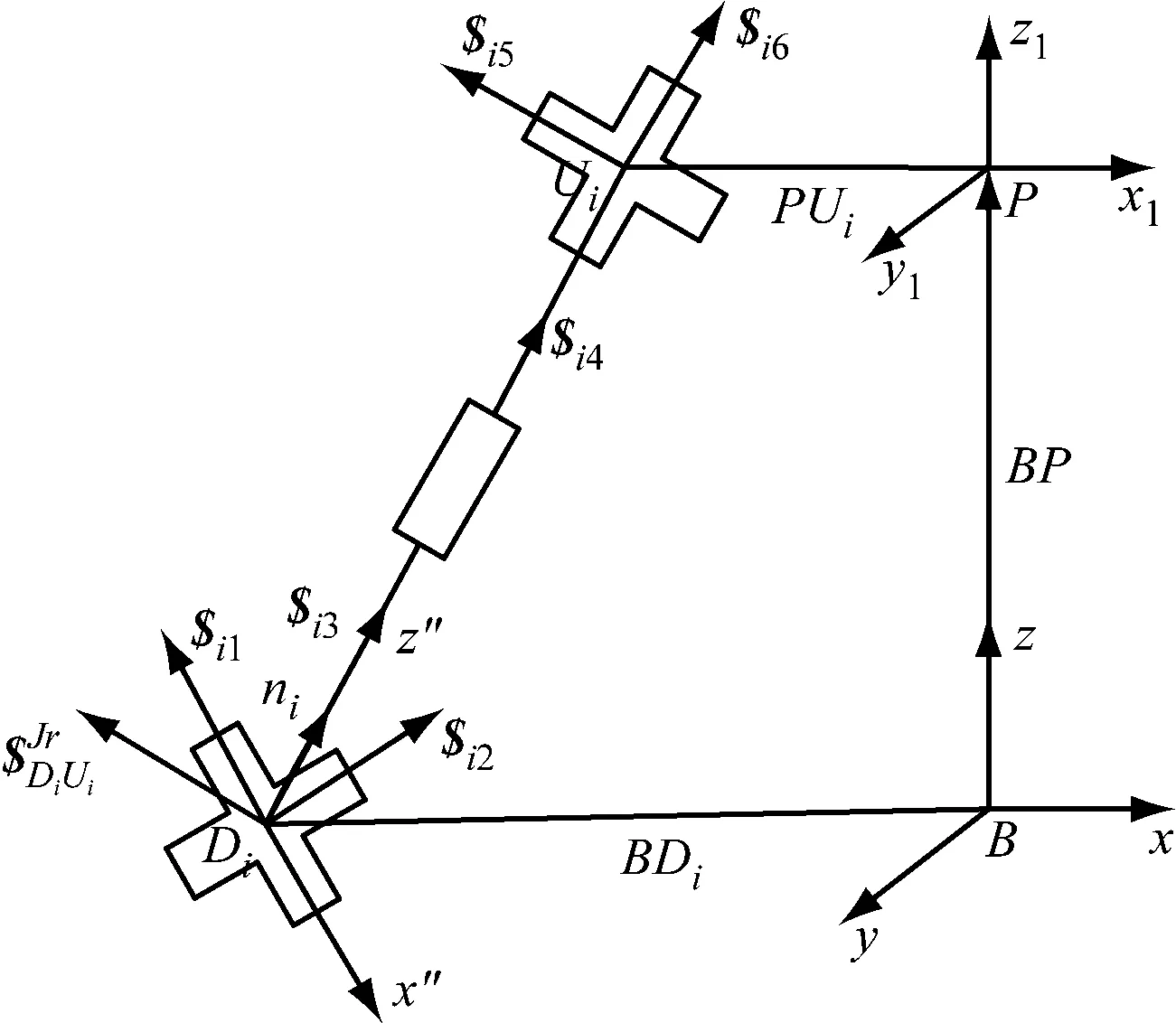
圖4 支路中上虎克鉸產生的奇異
將6條支路中的所有運動反螺旋合并成一個矢量空間為
(15)

根據自由度的定義可得
rvs=6-cvs
(16)
由式(16)可知:當任意支路中存在反螺旋時,機構的自由度<6。因此,當作動器的軸線與下虎克鉸的軸線共線,或者作動器的軸線與上虎克鉸的軸線共線時,機構將會處于奇異姿態,稱為運動學奇異。
1.4 約束奇異分析
前面用螺旋理論分析出被動虎克鉸在支路中產生的運動學奇異,并得到平臺產生奇異的兩種情況。為了解平臺產生約束奇異的條件,同樣用螺旋理論對平臺進行分析。
當約束住所有支路中的主動副時,如果施加外力矢,支路對動平臺的約束力矢與外力矢抵消,平臺處于平衡姿態,否則此時平臺處于奇異姿態。
6個支路的反螺旋對動平臺的約束力為
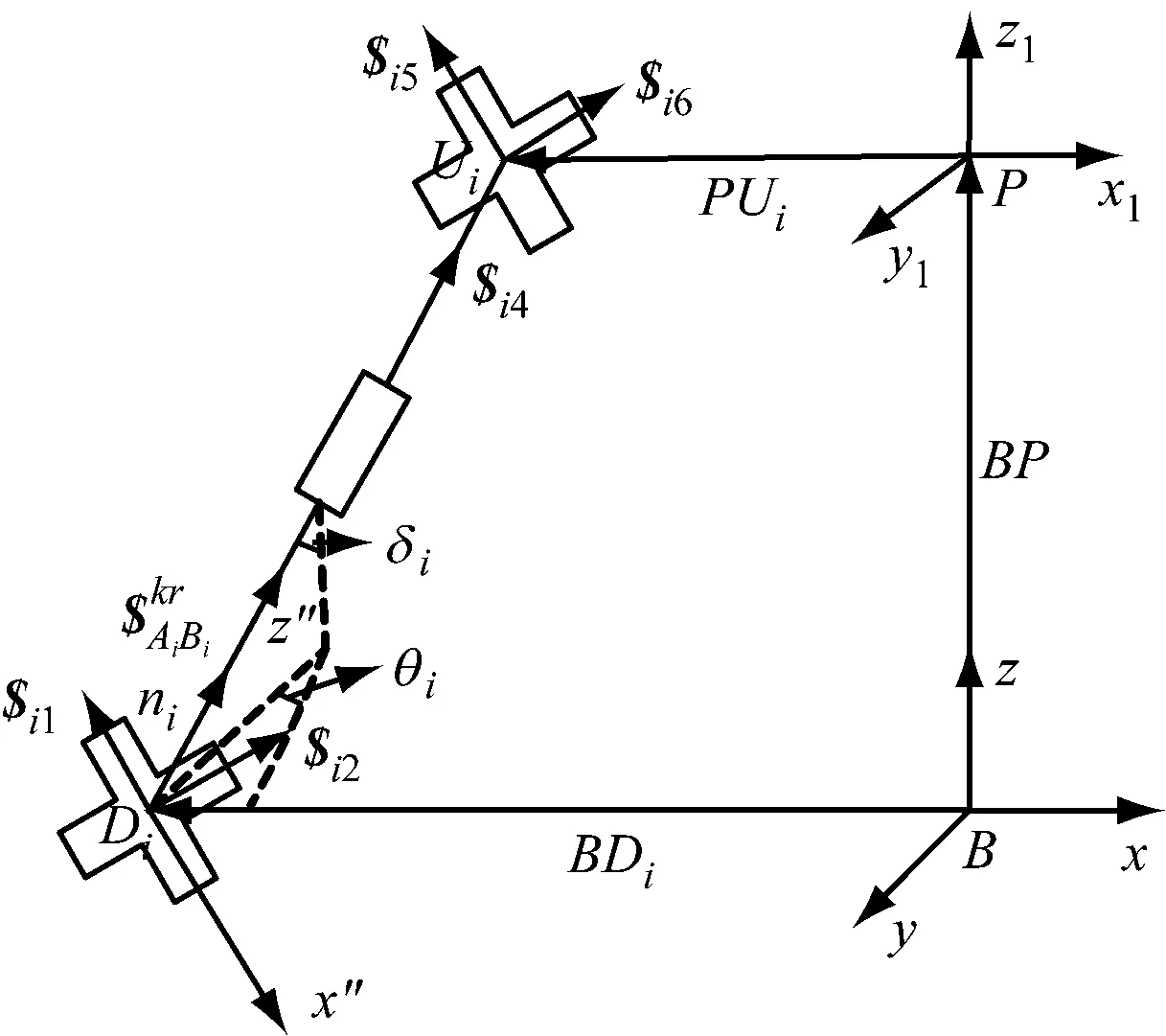
圖5 支路中主動副產生的奇異
(17)
設外力矢量為
(18)
如果平臺沒有處于奇異姿態,則滿足
(19)

由上述可知:局部坐標系是由固定坐標系Bxyz通過兩次歐拉變換得來的,兩次變換的歐拉角分別為θi和δi。支路i中的連桿在定平臺的投影夾角為π/2-δi,投影線與定平臺的y軸夾角為θi,如圖5所示。
(20)
式(20)中:Δi=sinδi(xUcosθi-yUsinθi),i=1,2,…,6。當R(M)=6時,6個約束力線矢線性無關,能夠充滿整個機構的6維空間,根據機構的自由度理論可得到r=6-6=0,此時機構處于穩定姿態。然而當R(M)<6時,6個約束力線矢將會在機構空間變得線性相關,不能抵消掉來自外力的力線矢和力偶,此時機構處于奇異姿態,稱為約束奇異。
2 基于遺傳算法的奇異位形檢測
當機構處于奇異位形時,自由度將會減少或增多,自由度減少會使機構達不到運行狀態,自由度增加又會使機構變得不可控。因此,能快速找到或者檢測到機構是否存在奇異顯得尤為重要。如果知道機構在可達工作空間的運行軌跡,只需要檢測在運行的過程中是否存在奇異位形。對于雙端虎克鉸的六自由度并聯機構,需要同時考慮主動移動副和被動副對其產生的影響。上述分析得到運動學奇異和約束奇異兩種機構奇異類型。當在可達工作空間內檢測機構的奇異位形時,由于機構的作動器伸縮是非線性的,從而是一個非線性的尋優問題。由于遺傳算法采用選擇、交叉和變異算子進行搜索,全局搜索能力強,但是局部搜索能力較弱,一般只能得到問題的次優解,而不是最優解;經典非線性規劃算法大多采用梯度下降的方法求解,局部搜索能力較強,但是全局搜索能力較弱。因此,本文結合兩種算法的優點,一方面采用遺傳算法進行全局搜索,另一方面采用非線性規劃算法進行局部搜索,分別對機構產生的運動學奇異和約束奇異進行檢測,以得到全局最優解。采用的非線性規劃遺傳算法的流程見圖6。

圖6 算法流程
2.1 基于非線性規劃遺傳算法的系統奇異位形檢測法
2.1.1運動學奇異檢測算法流程
經運動學奇異分析得到產生奇異有兩種情況,分別是固定于下平臺的虎克鉸軸線與驅動器軸線共線和固定于上平臺的虎克鉸軸線與驅動器軸線共線,即si2與ri共線和si6與ri共線。為能快速找到平臺在可達工作空間是否存在運動學奇異,只需檢測si2與ri或si6與ri是否共線,也就是檢測si2與ri的夾角或si6與ri的夾角是否為零。若已知固定于上、下平臺虎克鉸軸線的布局,si2與si6便可在空間進行表示。在一般情況下,固定在上平臺上的虎克鉸軸線和相應的窄邊互相垂直,并與上平臺平面呈45°;固定于下平臺的虎克鉸軸線與相應的窄邊互相垂直和與下平臺平面平行。假設上下平臺的單位法向量分別為e1和e2,此時:
(21)
在機構的某一支路中,便可求出固定于上下平臺的虎克鉸軸線與連桿的夾角εi和μi,其中:
(22)
運用遺傳算法對εi和μi的最小值進行尋優,算法流程如下:
(1) 編寫一個用于計算min(εi,μi)的調用函數y=NonlinearFind(x);
(2) 分別運用圖6流程和遺傳算法流程進行迭代尋優;
(3) 若尋優結果為零,說明機構在可達工作空間存在運動學奇異;若尋優結果>0,說明機構在可達工作空間不存在運動學奇異。
2.1.2約束奇異檢測算法流程
對機構的約束奇異檢測就是對矩陣M的行列式進行求解:如果|M|不為零,說明機構的6個運動反螺旋在空間線性不相關,機構不存在約束奇異;否則機構處于約束奇異姿態。運用遺傳算法對|M|和-|M|的最小值進行尋優,算法流程如下:
(1) 編寫一個用于計算(|M|min)和-(|M|min)的調用函數y=NonlinearFind(x);
(2) 運用圖6流程進行迭代尋優;
(3) 若尋優結果(|M|min)和-(|M|min)同號,說明機構在可達工作空間存在約束奇異;若尋優結果為(|M|min)和-(|M|min)異號,說明機構在可達工作空間不存在約束奇異。
2.2 算法實例
為驗證提出的檢測算法的有效性,對相關實例進行分析,并將結果與之對比。
采用BLAISE等[11]提出的5 000E伺服電動運行模擬機構,機構上下鉸點的參數見表1。
表1中:U中的第i列代表上鉸點Ui在局部坐標系P中的坐標;D中的第i列代表下鉸點Di在慣性坐標系B中的坐標。
當機構處于中位時,局部坐標系P和慣性坐標系B重合,中位高度為1.176 9 m。
2.2.1運動學奇異實例檢測
為避免算法運算結果具有局限性,對電動機構分別繞x、y、z軸轉動、沿x、y、z軸平動和既轉動又平動3種情況進行分析。
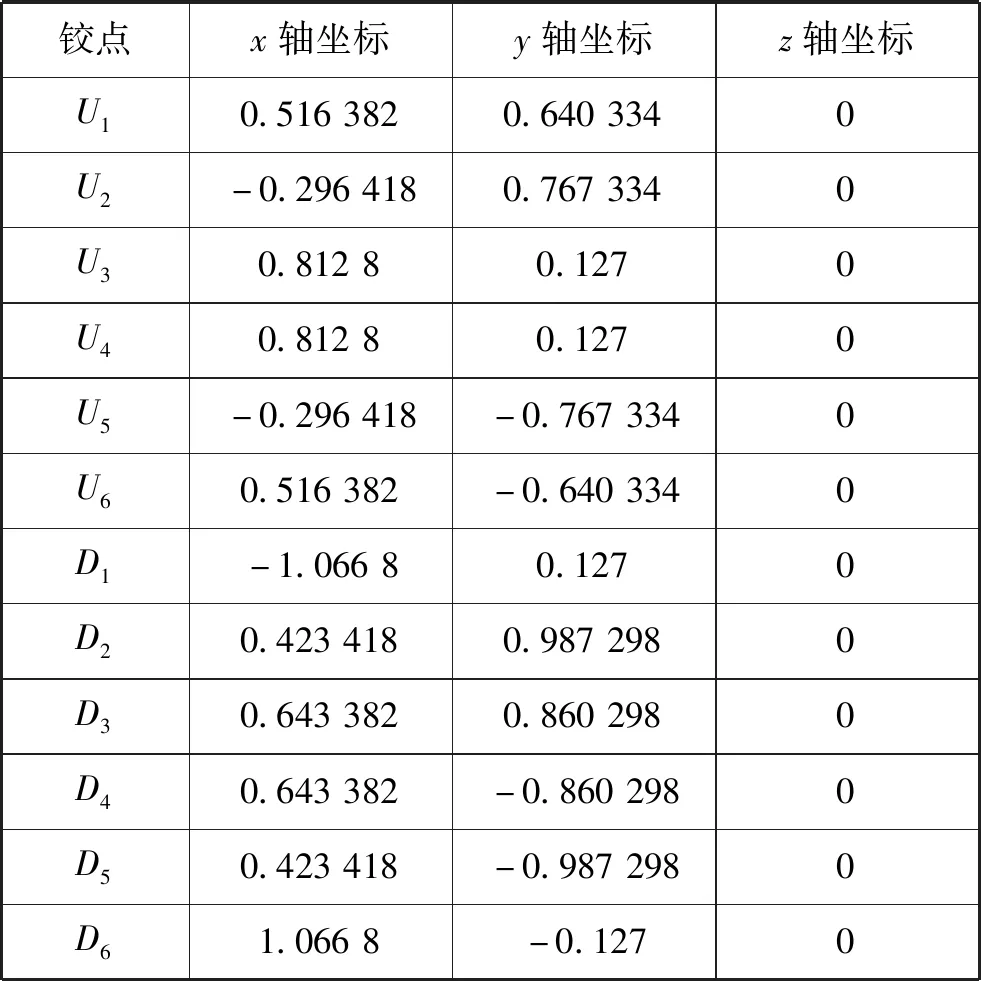
表1 上下鉸點坐標參數
(1) 方案1:轉動范圍為(-18°,18°)、(-18°,18°)、(-20°,20°)。
(2) 方案2:平動范圍為(-0.3 m,0.3 m)、(-0.3 m,0.3 m)、(-0.5 m,0.5 m)。
(3) 方案3:轉動范圍為(-18°,18°)、(-18°,18°)、(-20°,20°);平動范圍為(-0.3 m,0.3 m)、(-0.3 m,0.3 m)、(-0.5 m,0.5 m)。
所有算法都在MATLAB 2014a中完成,計算機的CPU是Inter(R)G630,主頻為2.70 GHz,內存為4 GB,操作系統為Windows 7。基于非線性規劃遺傳算法和遺傳算法的運動學奇異檢測結果分別見圖7和圖8。如圖7所示,進化2 000次后可知:方案1運行時間58.68 s,夾角最小值為29.42°;方案2運行時間52.36 s,夾角最小值為19.83°;方案3運行時間66.54 s,夾角最小值為34.31°。如圖8所示,進化2 000次后可知:方案1運行時間52.17 s,夾角最小值為33.56°;方案2運行時間49.87 s,夾角最小值為27.48°;方案3運行時間58.88 s,夾角最小值為9.87°。所以,電動機構在可達工作空間不存在運動學奇異。比較圖7與圖8可知:在同等條件下,基于非線性規劃遺傳算法的收斂速度和求解結果上優于基本的遺傳算法。可見,將線性規劃方法同遺傳算法相結合,提高了遺傳算法的搜索性能。
2.2.2約束奇異實例檢測
同樣對電動機構的轉動和平動進行約束奇異檢測見圖9。進化2 000次后可知:方案1運行時間102.35 s,(|M|min)=-0.496 7,-(|M|min)=0.392 6,(|M|min)與-(|M|min)異號,說明機構在方案1情況下不存在約束奇異;方案2運行時間113.24 s,(|M|min)=-0.535 6,-(|M|min)=0.282 5,(|M|min)與-(|M|min)異號,說明機構在方案2情況下不存在約束奇異;方案3運行時間121.54 s,(|M|min)=-0.347 2,-(|M|min)=0.212 3,(|M|min)與-(|M|min)異號,說明機構在方案3情況下不存在約束奇異。上述結果與BLAISE等人運用一種數值化方法進行奇異性檢測結果一致,證明此算法的有效性。
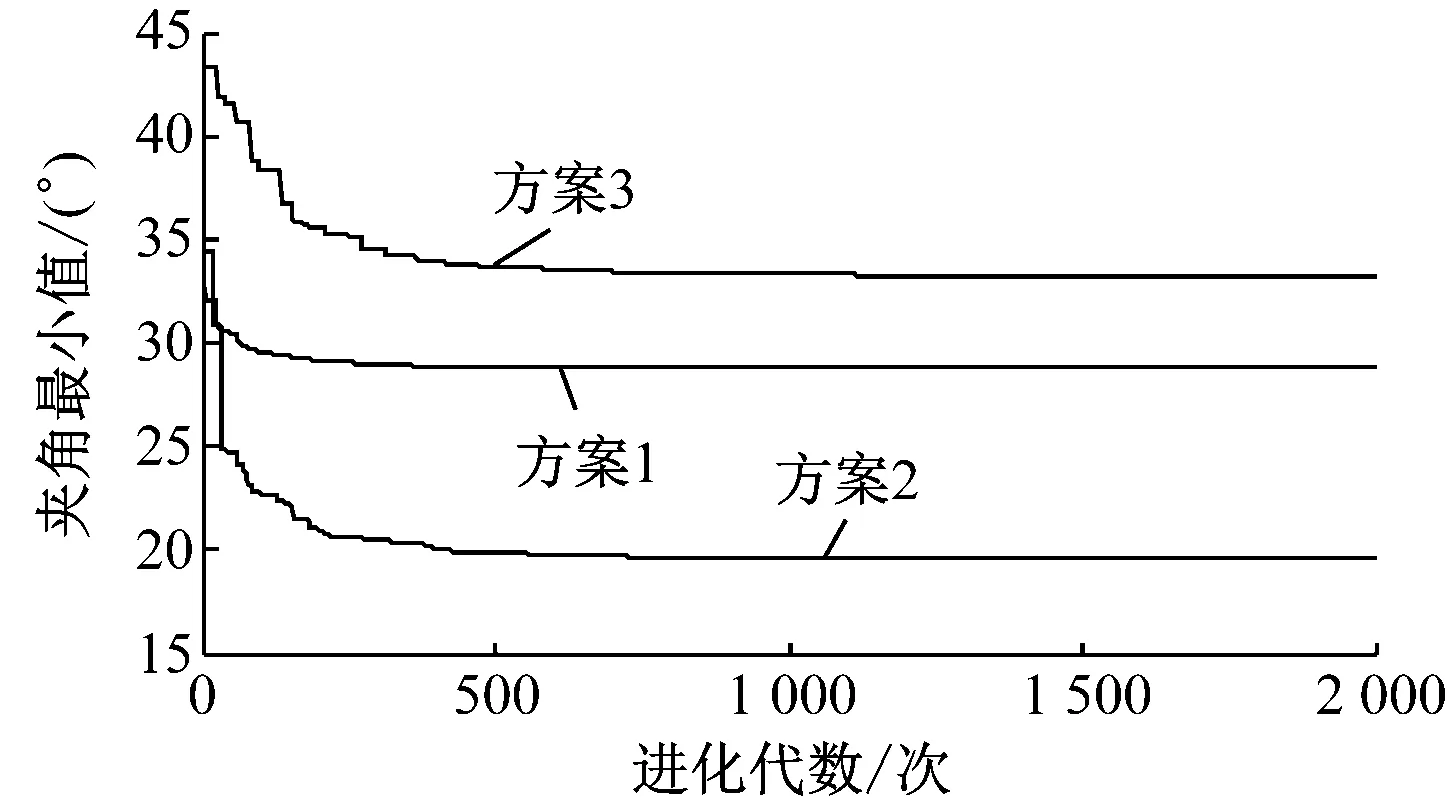
圖7 基于非線性規劃遺傳算法的運動學奇異檢測結果
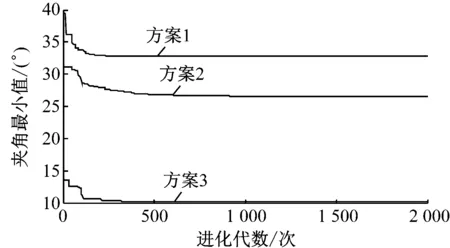
圖8 基于遺傳算法的運動學奇異檢測結果
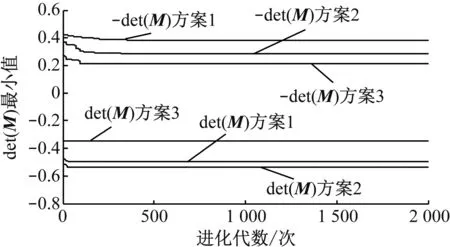
圖9 約束奇異檢測結果
2.3 算法實例二
同樣為避免算法的局限性,采用一臺有奇異位形的液壓驅動六自由度運動模擬平臺進行約束奇異檢測。HUANG等[12]發現“對于六自由度運動模擬平臺,當6個作動器的軸線都相交于同一條直線時,存在一個不需要的純轉動運動,即此時為奇異位姿”。為驗證此平臺是存在奇異位形的,采用所提出的約束奇異檢測算法進行檢測。液壓機構上下鉸點的參數見表2。
對液壓機構分別繞x軸、y軸、z軸轉動、沿x軸、y軸、z軸平動和既轉動又平動3種情況進行分析。
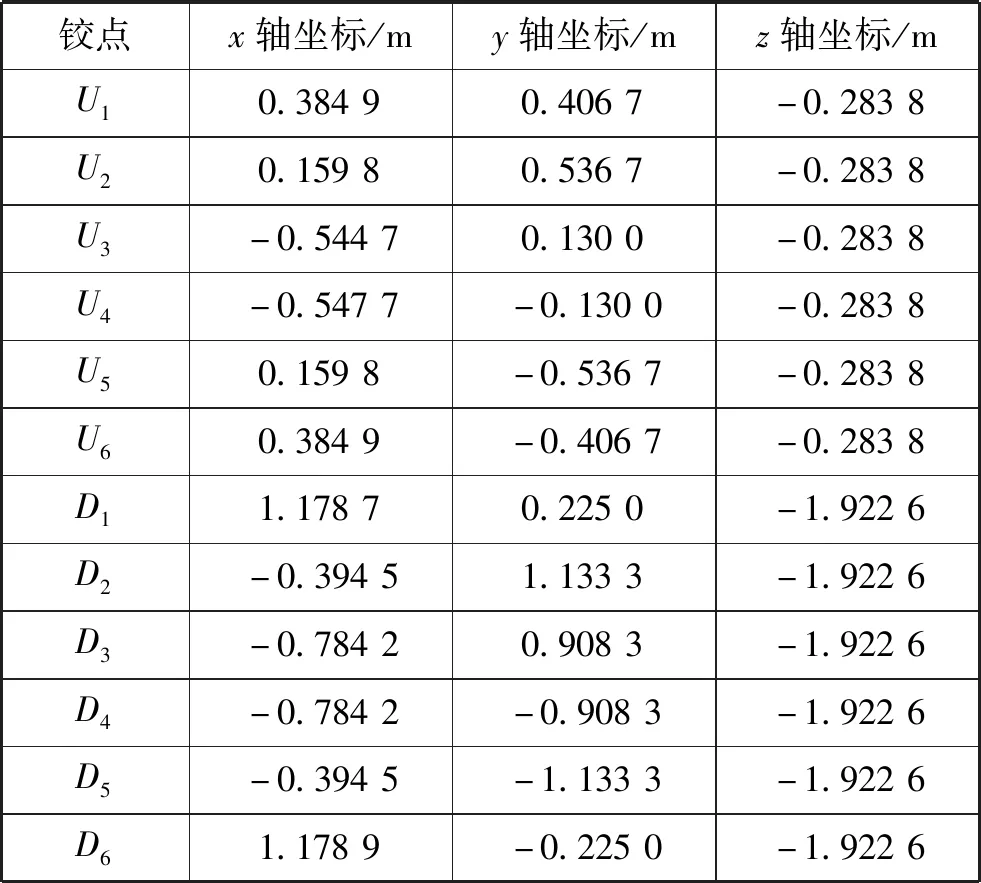
表2 上下鉸點坐標參數
(1) 方案1:轉動范圍為(-20°,20°)、(-20°,20°)、(-25°,25°)。
(2) 方案2:平動范圍為(-0.5 m,0.5 m)、(-0.5 m,0.5 m)、(-0.35 m,0.35 m)。
(3) 方案3:轉動范圍為(-20°,20°)、(-20°,20°)、(-25°,25°);平動范圍為(-0.5 m,0.5 m)、(-0.5 m,0.5 m)、(-0.35 m,0.35 m)。
進化2 000次后可知:方案1運行時間115.32 s,(|M|min)=-0.702 8,-(|M|min)=-0.403 2,(|M|min)與-(|M|min)同號,說明機構在方案1情況下存在約束奇異;方案2運行時間109.6 s,(|M|min)=-0.280 3,-(|M|min)=-0.429 7,(|M|min)與-(|M|min)同號,說明機構在方案2情況下存在約束奇異;方案3運行時間131.49 s,(|M|min)=-0.653 2,-(|M|min)=-0.452 6,(|M|min)與-(|M|min)同號,說明機構在方案3情況下存在約束奇異見圖10。此奇異性檢測結論與實際情況相符,說明本文所提出的相應奇異性檢測算法是可行的和有效的。

圖10 約束奇異檢測結果
3 結束語
通過運用螺旋理論分別對并聯機構的被動副虎克鉸和主動移動副進行奇異分析,得到機構產生兩種奇異位形的條件。當固定于上下虎克鉸的軸線與連桿的軸線共線時,機構處于運動學奇異,機構的自由度減少;當鎖定各個支路的主動副,并且|M|=0時,機構處于約束奇異,機構的自由度增加。最后運用遺傳算法對分析結果進行2 000次迭代尋優,檢測結果證明此算法的有效性,最大運行時間為131.49 s,證明此算法的高效性,為以后船舶模擬平臺實時控制過程中的奇異位形檢測提供理論支撐。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
