基于語義的船舶行為動態(tài)推理機(jī)制
2019-10-30 01:26:46文元橋張義萌周春輝a肖長詩
中國航海 2019年3期
文元橋, 張義萌, 黃 亮, 周春輝a,,c, 肖長詩,d, 張 帆,d
(武漢理工大學(xué) a.國家水運(yùn)安全工程技術(shù)研究中心; b.航運(yùn)學(xué)院;c.智能交通系統(tǒng)研究中心; d.內(nèi)河航運(yùn)技術(shù)湖北省重點實驗室,湖北 武漢 430063)
在復(fù)雜、開放的水上交通環(huán)境中準(zhǔn)確地識別并預(yù)測動態(tài)、不確定的船舶行為是宏觀、微觀行為和異常行為分析的重點,其需要揭示船舶行為的行為模式和內(nèi)在演化機(jī)制。在水上交通大數(shù)據(jù)中挖掘船舶的行為模式需要有效地組織水上交通態(tài)勢信息,并清晰、完整地表達(dá)船舶行為的各個要素間的聯(lián)系,發(fā)現(xiàn)船舶行為規(guī)律;揭示船舶行為的內(nèi)在演化機(jī)制需要根據(jù)動態(tài)的信息發(fā)現(xiàn)各行為要素間的約束關(guān)系和影響程度,以在不確定信息中挖掘隱藏的船舶行為,并動態(tài)預(yù)測船舶行為。
在船舶行為相關(guān)研究中,劉敬賢等[1]定義港口內(nèi)的匯入、匯出、穿越、掉頭等船舶行為的概念。朱飛祥等[2]將港口水域劃分為地理網(wǎng)格,并統(tǒng)計分析地理單元格上的船舶行為。甄榮[3]使用k-means聚類算法和貝葉斯分類器識別異常船舶行為。馬文耀等[4]使用一致性檢測識別船舶變速和轉(zhuǎn)向異常行為。但目前國內(nèi)的研究大多借用經(jīng)典算法進(jìn)行船舶行為分析,很少考慮船舶行為信息中要素與要素間的聯(lián)系,因此難以形成背景信息與行為信息的交互機(jī)制,導(dǎo)致不能揭示船舶行為的內(nèi)在演化模式并準(zhǔn)確識別、預(yù)測船舶行為。
船舶行為要素與要素間的聯(lián)系實際上是信息的語義描述及信息語義之間的關(guān)聯(lián)關(guān)系,是構(gòu)成語義網(wǎng)絡(luò)的基礎(chǔ)。語義網(wǎng)絡(luò)是一種對某個領(lǐng)域中的概念和概念間關(guān)系建立明確、規(guī)范的形式化表達(dá)的模型,本體則是建立語義網(wǎng)絡(luò)的建模工具[5],而船舶行為語義網(wǎng)絡(luò)是船舶的動作、行動以及對其所處交通態(tài)勢的反應(yīng)的語義描述與屬性關(guān)系的集合。在近幾年的研究[6-8]中,使用語義模型挖掘船舶行為已取得較好的成果。但使用語義網(wǎng)絡(luò)自身的邏輯推理識別船舶行為難以處理船舶行為的動態(tài)性和不確定性。貝葉斯網(wǎng)絡(luò)在給出不確定信息的推理結(jié)論方面應(yīng)用十分廣泛[9],但其應(yīng)用大多是靜態(tài)貝葉斯網(wǎng)絡(luò)推理,動態(tài)貝葉斯網(wǎng)絡(luò)應(yīng)用較少,面向海事領(lǐng)域的船舶行為動態(tài)概率推理研究更顯缺乏。
1 問題描述與建模
為形成系統(tǒng)、清晰的船舶行為模型,揭示船舶行為的內(nèi)在機(jī)理,挖掘隱藏的船舶行為,需要建立一種基于語義的船舶行為動態(tài)推理機(jī)制。從船舶的動態(tài)特性出發(fā),以船舶軌跡為行為線索,構(gòu)建船舶行為模型見圖1。
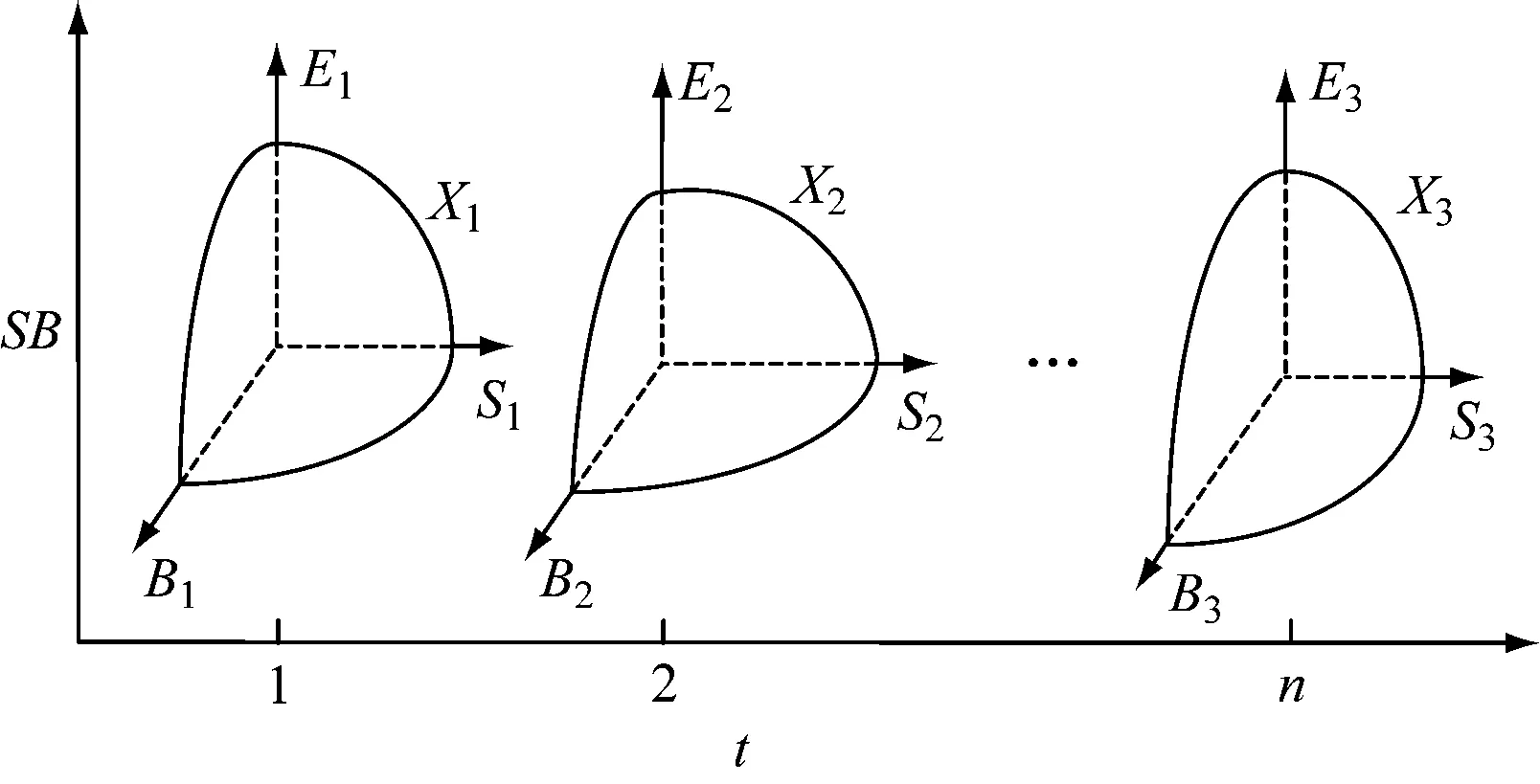
圖1 船舶行為模型
船舶軌跡實質(zhì)上是時間序列下的位置點,考慮外界環(huán)境(包括基礎(chǔ)設(shè)施、地理地形、氣象水文等)的影響時,每個時刻的位置點都具有多維度的各種狀態(tài)S(如航向、航速);每種維度的連續(xù)位置點以及多種維度的多個位置點構(gòu)成的不同層次的子軌跡段,分別表現(xiàn)為不同的船舶行為B(如加速);多個不同層次的船舶行為以及狀態(tài)可推理出事件E(如抵港)。每個時刻的狀態(tài)、行為和事件互相耦合、互相影響,形成該時刻的船舶行為集合X,其表現(xiàn)為船舶行為規(guī)律約束的三維空間集合。某個時刻的船舶行為模型為
F(S(γ),B(γ),E(γ),σ)
(1)
式(1)中:γ={γ1,γ2,…,γn}為影響船舶行為的外界環(huán)境,如地點等,外界環(huán)境一般在一段時間內(nèi)比較穩(wěn)定,因此可作為船舶行為的參數(shù)。S={S1,S2,…,Sn}表示狀態(tài)的集合,B、E類似。σ={σ1,σ2,…,σn}為狀態(tài)、行為、事件間的相關(guān)函數(shù)集合。
船舶行為是隨時間動態(tài)變化的,因此,需要引入時間序列t={t1,t2,…,tn},在時間序列下的船舶行為模型為
G(Xt(γ),σ,δ)
(2)
式(2)中:Xt=St∪Bt∪Et為在時間序列t下的船舶行為集合,各個時刻的X表示的三維空間集合是隨時間不斷變化的;δ={δ1,δ2,…,δn}為船舶行為變遷函數(shù)集合,表示船舶行為在時間片間的變遷情況。
狀態(tài)是最容易從原始數(shù)據(jù)中獲得的,稱為觀測行為,而行為、事件為需要對船舶行為模型求解的隱藏行為。對模型的求解過程實際上是歷史和當(dāng)前時刻的狀態(tài)已知時,在三維空間集合X內(nèi)通過σ和δ等函數(shù)關(guān)系求當(dāng)前時刻行為和事件的分布律,即
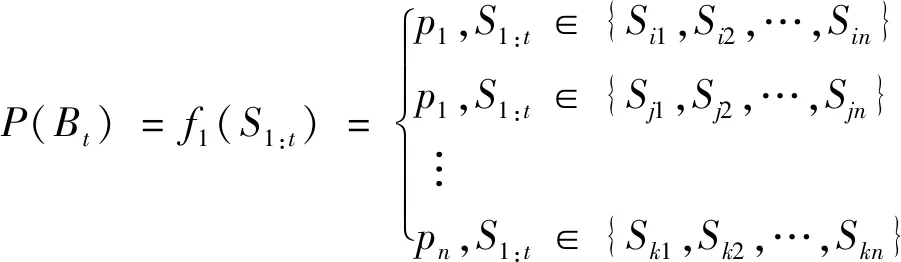
(3)
P(Et)=f2(S1:t,B1:t)=
(4)
使用語義模型清晰、完整表達(dá)出船舶行為的各個要素與要素間聯(lián)系,得到行為模型F,并形成易于處理、易于表達(dá)的規(guī)范形式;使用動態(tài)貝葉斯網(wǎng)絡(luò)基于語義模型深入挖掘隱藏的船舶行為,推理模型中的行為和事件,識別并預(yù)測動態(tài)船舶行為發(fā)生的概率,即構(gòu)建在時間序列下的船舶行為模型G并求解P(Bt)和P(Et)。推理得到的行為概率可語義模型交互,形成動態(tài)的自然語言表達(dá)。
2 船舶行為語義模型
語義模型為某時刻的船舶行為模型,其對各船舶行為概念進(jìn)行形式化表達(dá),在非結(jié)構(gòu)、無語義的原始數(shù)據(jù)中提取結(jié)構(gòu)化的語義信息,構(gòu)建以船舶行為為核心的語義網(wǎng)絡(luò)(見圖2)。
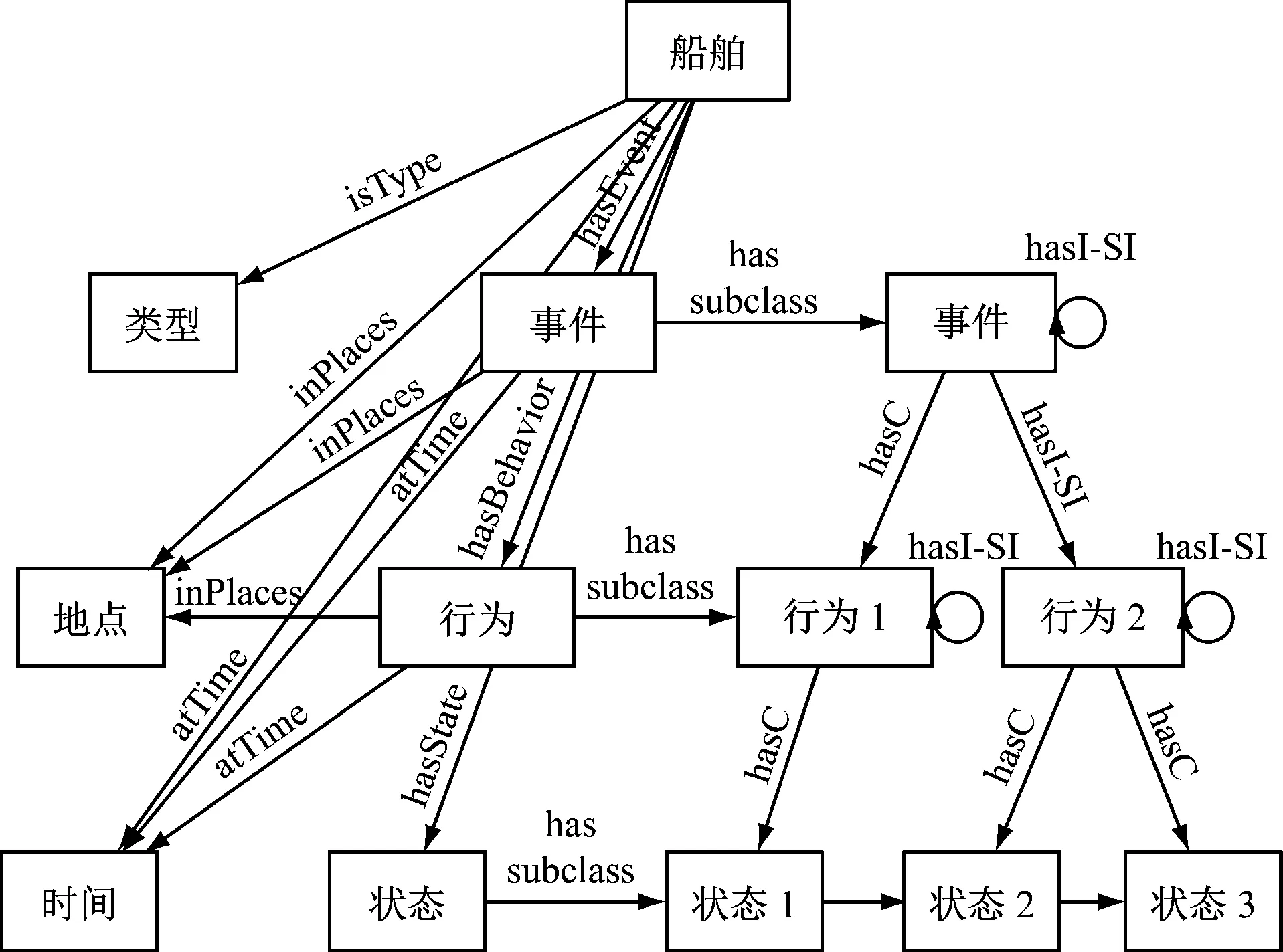
圖2 船舶行為語義網(wǎng)絡(luò)模型
語義網(wǎng)絡(luò)可以形式化表達(dá)為一個三元組:
SN={C,R,I}
(5)
式(5)中:SN為語義網(wǎng)絡(luò);C={C1,C2,…,Cn}為類,他表示對象的集合,包含船舶行為集合X和外界環(huán)境γ;R={R1,R2,…,Rn}為關(guān)系的集合,表示類之間的相互作用,包含相關(guān)函數(shù)和變遷函數(shù)δ;Ii為本體的實例,也就是具體的對象。具體而言,C={V,P,T,Tp,S,B,E},其中:V、P、T、Tp分別為船舶(Vessels)、地點(Place)、時間(Time)和類型(Type),S、B、E即上述提及的狀態(tài)(State)、行為(Behavior)、事件(Event),此3類為核心類。
語義模型中關(guān)系集合包括對象屬性(Object Property)和數(shù)據(jù)類型屬性(Data Type Property)。數(shù)據(jù)類型屬性為類或個體的數(shù)據(jù)描述或數(shù)據(jù)限制,如船舶A速度為10 kn,高速船舶船速最低為15 kn等。對象屬性包含以下類間的關(guān)系:
1) Vessels類與atTime、hasBehavior、hasEvent、inPlaces、isType其他類的屬性關(guān)系等。
2) Behavior類和Event類與Time類的atTime屬性關(guān)系,動態(tài)貝葉斯網(wǎng)絡(luò)推理后的結(jié)果以開始時間和結(jié)束時間在語義網(wǎng)絡(luò)中存儲,以便于查詢、調(diào)用和表達(dá)。
3) State類、Behavior類、Event類之間的hasCharacteristics(簡記為hasC)和hasInter-SliceInfluenceto(簡記為hasI-SI)屬性關(guān)系,hasCharacteristics屬性關(guān)系為某時間片內(nèi)的節(jié)點間關(guān)系,hasInter-SliceInfluenceto為相鄰時間片的節(jié)點間關(guān)系,分別對應(yīng)船舶行為模型中的相關(guān)函數(shù)和變遷函數(shù)δ。
語義模型中類的實例(Instances)為類的實際對象,如船舶的實例渡船江城4號(JiangCheng4Hao,MMSI:413932547)等。
3 船舶行為動態(tài)貝葉斯網(wǎng)絡(luò)模型
3.1 動態(tài)貝葉斯網(wǎng)絡(luò)定義
動態(tài)貝葉斯網(wǎng)絡(luò)的初始網(wǎng)絡(luò)和轉(zhuǎn)移網(wǎng)絡(luò)見圖3。
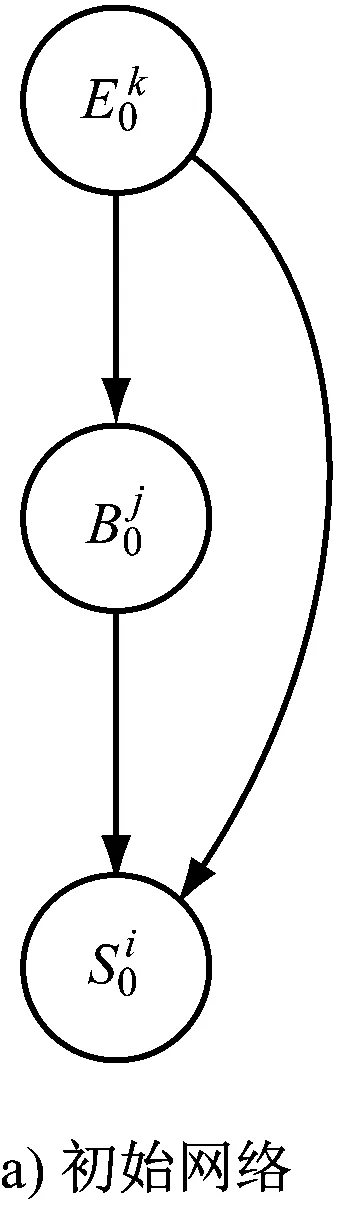
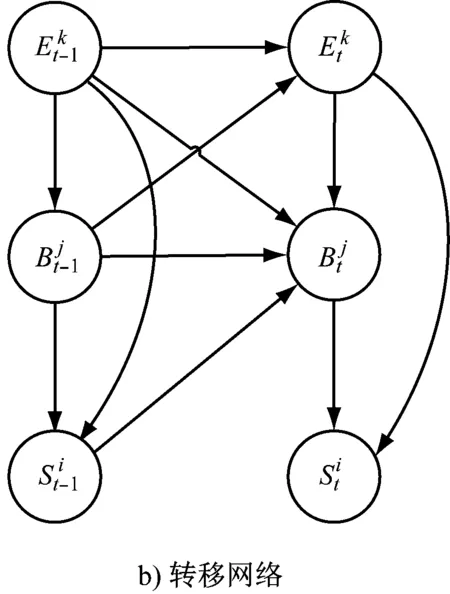
圖3 動態(tài)貝葉斯網(wǎng)絡(luò)的初始網(wǎng)絡(luò)和轉(zhuǎn)移網(wǎng)絡(luò)
1) 在t=0時間片,將語義網(wǎng)絡(luò)轉(zhuǎn)化為初始網(wǎng)絡(luò),并定義初始時刻的概率分布P(X0)。其基本思想是將語義網(wǎng)絡(luò)中屬于狀態(tài)、行為、事件的子類對應(yīng)貝葉斯網(wǎng)絡(luò)中的節(jié)點,節(jié)點對應(yīng)隨機(jī)變量Xi,其概率值為P(Xi);子類的實例對應(yīng)隨機(jī)變量Xi的取值,本文中的取值都是離散的;子類間的屬性關(guān)系對應(yīng)節(jié)點間的有向弧,表明節(jié)點間的直接影響,并具有相應(yīng)的條件概率。在初始網(wǎng)絡(luò)內(nèi)的所有節(jié)點的聯(lián)合概率可表示為
(6)
式(6)中:Pa(Xi)為任意Xi節(jié)點(i=1,2,…,n)的所有父節(jié)點。若Xi沒有父節(jié)點,則Xi為根節(jié)點,P(Xi|Pa(Xi))=P(Xi)表示其先驗概率。
2) 在t>0時間片的節(jié)點可能受以前時間片內(nèi)節(jié)點的影響,另外可由上一時間片節(jié)點的概率預(yù)測下一時間片節(jié)點的概率,所以需要定義轉(zhuǎn)移網(wǎng)絡(luò)。假設(shè)動態(tài)貝葉斯網(wǎng)絡(luò)符合一階馬爾可夫過程,則轉(zhuǎn)移網(wǎng)絡(luò)為包含兩個相鄰時間片的貝葉斯網(wǎng)絡(luò)。時間片間僅有行為或事件節(jié)點間的影響,可定義Zt為t時間片貝葉斯網(wǎng)絡(luò)中的所有行為節(jié)點(Bt)和事件節(jié)點(Et),則第t個時間片的Zt在之前所有時間片下的條件分布為
P(Zt|Z0:t-1)=P(Zt|Zt-1)=
(7)
P(St|Z0:t-1,S0:t-1)=P(St|Zt)
(8)
由初始網(wǎng)絡(luò)和轉(zhuǎn)移網(wǎng)絡(luò)可將動態(tài)貝葉斯網(wǎng)絡(luò)展開到第T個時間片。從第0個時間片到第T個時間片的聯(lián)合概率分布為
P(X1:T)=P(Z0)·P(S0)×
(9)
3.2 參數(shù)學(xué)習(xí)
初始網(wǎng)絡(luò)中的條件概率和轉(zhuǎn)移網(wǎng)絡(luò)中的轉(zhuǎn)移矩陣分別對應(yīng)船舶行為模型中的相關(guān)函數(shù)σ和變遷函數(shù)δ,兩者都為動態(tài)貝葉斯網(wǎng)絡(luò)中的參數(shù)θ,需要在推理前給出。本文使用最大似然估計法進(jìn)行參數(shù)學(xué)習(xí)。動態(tài)貝葉斯網(wǎng)絡(luò)中的節(jié)點都為離散型隨機(jī)變量,設(shè)其分布律為
P{X=x}=p(x;θ),x=x(1),x(2),…
(10)
式(10)中:θ=(θ1,θ2,…,θm)T為未知參數(shù)。(X1,X2,…,Xn)T為來自總體X的樣本,則樣本的聯(lián)合分布律稱為似然函數(shù),記為L(θ),即
(11)
之后,選取使似然函數(shù)達(dá)到最大的參數(shù)值作為未知參數(shù)θ的估計值,即求似然方程:
(12)
3.3 動態(tài)推理

(13)
貝葉斯公式
(14)
由式(14)和貝葉斯網(wǎng)絡(luò)的條件獨立性假設(shè)可得

(15)
4 實例計算與結(jié)果分析
為對上述模型進(jìn)行驗證,選取所有船舶共有的靠離泊行為為例進(jìn)行實例分析。具體驗證過程如下:
4.1 基礎(chǔ)數(shù)據(jù)處理
使用的數(shù)據(jù)來自于船舶自動識別系統(tǒng)(Automatic Identification System,AIS)和谷歌地球,AIS數(shù)據(jù)為長江渡船江城4號于2014年1月1日某航次數(shù)據(jù),地理數(shù)據(jù)為武漢關(guān)碼頭區(qū)域數(shù)據(jù)。對AIS數(shù)據(jù)進(jìn)行抽取和清洗等預(yù)處理后,僅需要對軌跡數(shù)據(jù)和地理數(shù)據(jù)做簡單的判斷即可得到狀態(tài)信息,如加減速狀態(tài)僅需要判斷AIS數(shù)據(jù)中的速度是否增加等。判斷轉(zhuǎn)向狀態(tài)時航向差Δcog(cog為船舶對地航向)計算為

(16)
4.2 靠離泊語義網(wǎng)絡(luò)建模
語義網(wǎng)絡(luò)見圖4(圖中部分概念后的英文為語義概念簡稱,同時省略圖2中已有的屬性關(guān)系),其中:轉(zhuǎn)向行為(Turning)由前5個軌跡點的轉(zhuǎn)向狀態(tài)(turn1-5)推理;變速行為(SpeedChange)與轉(zhuǎn)向行為類似;停泊行為(Berth)由在港內(nèi)/外(inside/outside)和速度是否為0(speed=0)推理;駛?cè)?駛出行為(Enter/Leave)由相鄰兩點是否在區(qū)域內(nèi)的狀態(tài)判斷;抵港/離泊事件(Arrival/Departure)由變速行為和是否在碼頭區(qū)域內(nèi)推理;橫駛事件(AcrossRiver)由離泊進(jìn)行預(yù)測,指離開碼頭區(qū)域后渡船橫渡長江的行為,其沒有證據(jù)支持判斷,只能由渡船的行為模式為依據(jù),根據(jù)離泊和其本身預(yù)測,因此可檢驗?zāi)P偷念A(yù)測能力。
4.3 動態(tài)貝葉斯網(wǎng)絡(luò)構(gòu)建與參數(shù)學(xué)習(xí)
語義網(wǎng)絡(luò)與貝葉斯網(wǎng)絡(luò)都是圖結(jié)構(gòu)模型,其中:語義網(wǎng)絡(luò)中的類可轉(zhuǎn)換為貝葉斯網(wǎng)絡(luò)中的節(jié)點;類下的實例可以轉(zhuǎn)換為節(jié)點下的變量;類間的屬性關(guān)系可以轉(zhuǎn)換為節(jié)點間的依賴關(guān)系[10],且只需對狀態(tài)、行為、事件3層需要動態(tài)推理的核心類進(jìn)行轉(zhuǎn)換。由語義網(wǎng)絡(luò)得到的靠離泊動態(tài)貝葉斯網(wǎng)絡(luò)見圖5(各節(jié)點簡記為英文首字母)。
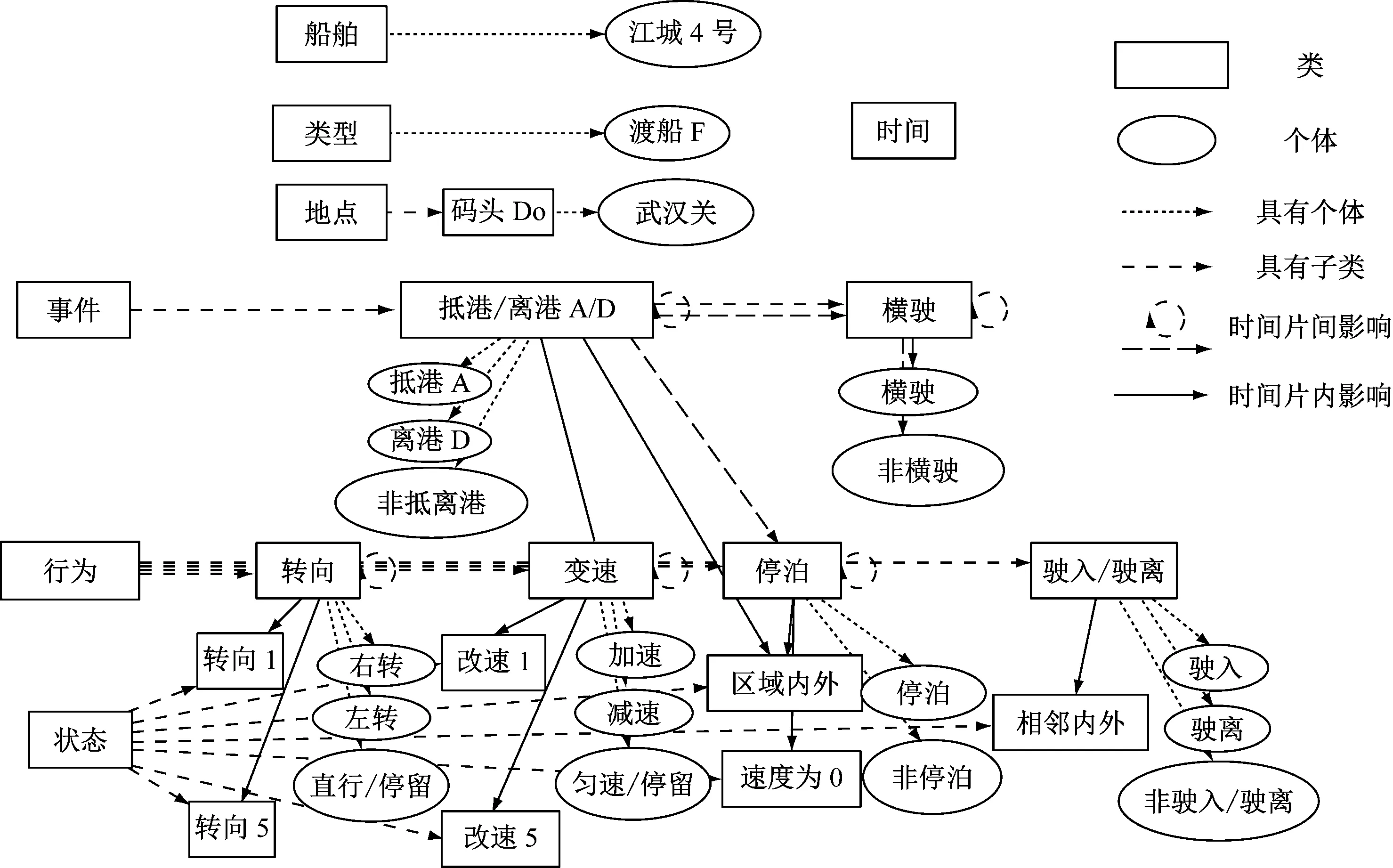
圖4 靠離泊語義網(wǎng)絡(luò)
得到網(wǎng)絡(luò)結(jié)構(gòu)后對該渡船2014年1月的AIS數(shù)據(jù)(約27萬條)標(biāo)注,作為參數(shù)學(xué)習(xí)樣本。使用最大似然估計的方法進(jìn)行參數(shù)學(xué)習(xí),得到概率見表1~表3(部分概率表省略)。
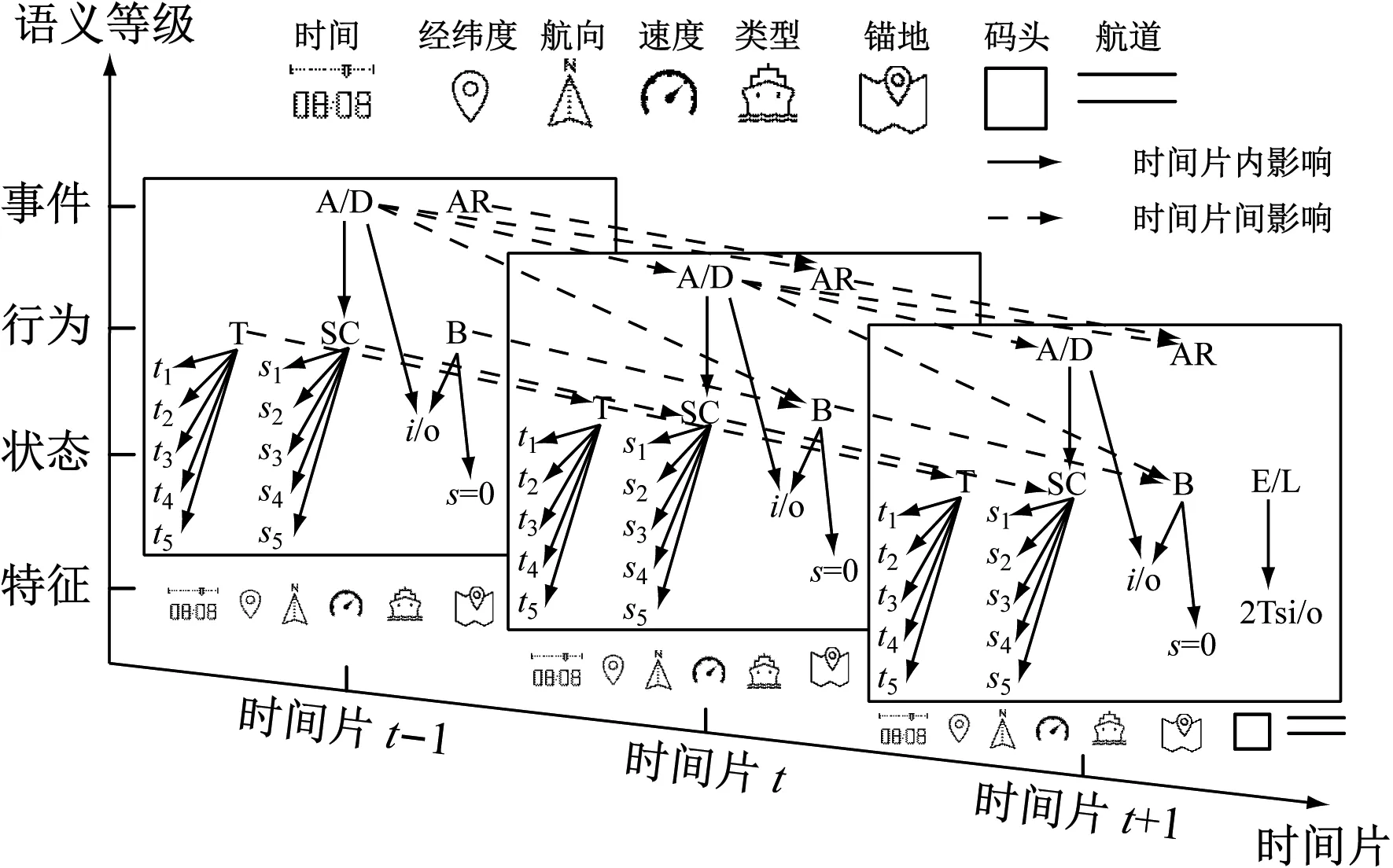
圖5 靠離泊動態(tài)貝葉斯網(wǎng)絡(luò)

表1 邊緣概率

表2 時間片內(nèi)條件概率
4.4 推理并預(yù)測船舶行為
已知網(wǎng)絡(luò)結(jié)構(gòu)和參數(shù)后,結(jié)合由數(shù)據(jù)得到的狀態(tài)節(jié)點概率,即可動態(tài)推理船舶行為和事件發(fā)生的概率,江城4號靠離泊軌跡見圖6a,推理結(jié)果見圖6b~6d。由于停泊時各行為的概率變化很小,圖6省略了部分停泊時間片的推理結(jié)果。
由圖6可知:抵港、離港和停泊都與事實相符,且船舶在抵港時減速左轉(zhuǎn),離港時加速,符合良好船藝。模型不會像邏輯推理一樣將可能發(fā)生的行為誤判為沒有發(fā)生,而是賦予該行為準(zhǔn)確的發(fā)生概率。時間片間的轉(zhuǎn)移矩陣使得行為的判斷不僅依賴于當(dāng)前時間片內(nèi)的證據(jù),還考慮歷史行為的影響,因此,當(dāng)前時間片內(nèi)的證據(jù)不準(zhǔn)確時不會出現(xiàn)行為誤判。
推理結(jié)果中加粗線段(停泊和橫駛)為明顯進(jìn)行了行為預(yù)測的部分,其中:在抵港將要結(jié)束時(11≤TS<16)停泊被預(yù)測出將要發(fā)生;而橫駛初始概率即為其邊緣概率,之后其發(fā)生的概率受歷史時間片中離泊和其自身發(fā)生的概率影響,在離泊發(fā)生后(49≤TS<53)其發(fā)生的概率逐漸增大,尤其是在離泊概率降低時(TS=52),橫駛概率達(dá)到最大,表示其將要發(fā)生。但由于沒有證據(jù)支持,在離泊結(jié)束后(TS≥53)橫駛逐漸趨向于其本身的邊緣概率。由于預(yù)測行為不是由證據(jù)直接推理所得,而且有實際發(fā)生的行為的限制,其概率較小,因此能夠與實際發(fā)生的行為相互區(qū)分。
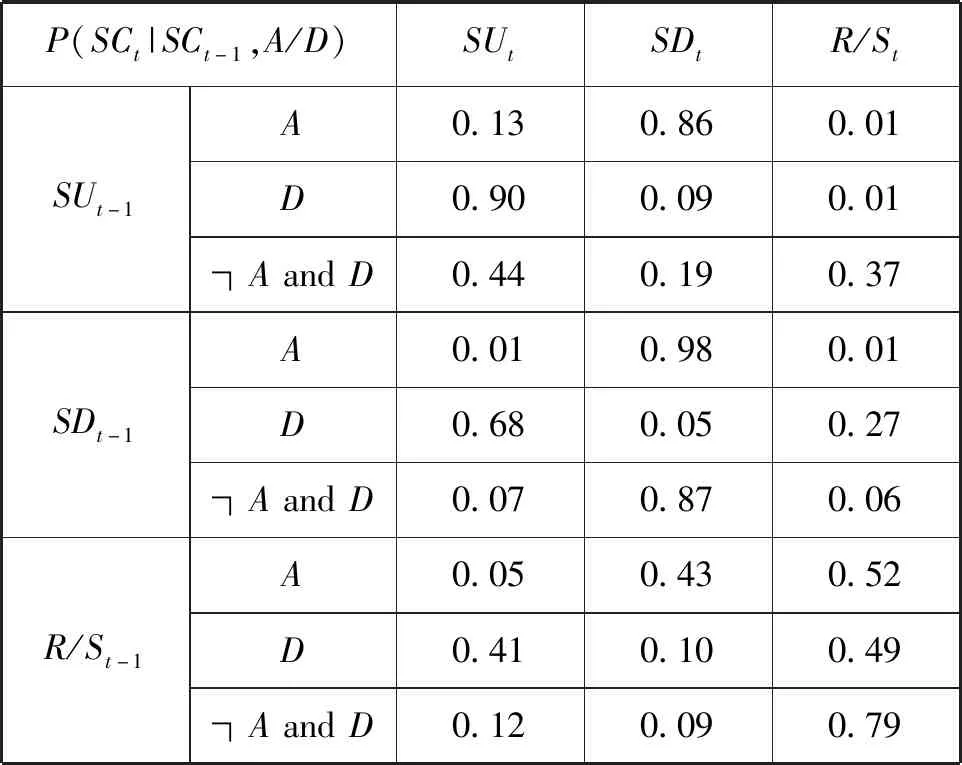
表3 時間片間轉(zhuǎn)移矩陣
推理結(jié)果既可用概率曲線形式描述,也可映射到語義網(wǎng)絡(luò)中,以方便船舶行為的語義化表達(dá)和進(jìn)一步的共享、查詢等應(yīng)用。當(dāng)行為將要發(fā)生或已經(jīng)發(fā)生時進(jìn)行簡單的語義組織即可形成如下語義表達(dá):
a) 江城4號靠離泊軌跡圖
b) 部分行為推理結(jié)果
c) 轉(zhuǎn)向行為推理結(jié)果
d) 變速行為推理結(jié)果
1) JiangCheng4Hao (ferry) hasEvent Arrival in WuHanGuan (dock) BeginTime at 2014/1/1T07:01:35+8:00。
2) JiangCheng4Hao (ferry) hasBehavior Berth in WuHanGuan (dock) BeginTime at 2014/1/1T07:03:46+8:00。
3) JiangCheng4Hao (ferry) will hasEvent AcrossRiver in WuHanGuan (dock) at 2014/1/1T07:12:06+8:00。
5 結(jié)束語
面向智能航海應(yīng)用,利用語義模型與動態(tài)貝葉斯網(wǎng)絡(luò)建立一種船舶行為動態(tài)推理機(jī)制,典型的船舶靠離泊模型證明所提出的方法能準(zhǔn)確地識別并預(yù)測動態(tài)船舶行為。推理結(jié)果可提供給船舶交通服務(wù)(Vessel Traffic Service, VTS)操作員、引航員、船員及智能船舶等明確、精準(zhǔn)的動態(tài)船舶行為信息;具有標(biāo)準(zhǔn)化結(jié)構(gòu)的語義信息便于應(yīng)用到智能船舶系統(tǒng)中,可使智能船舶動態(tài)感知并預(yù)測周圍船舶的行為,及時規(guī)避風(fēng)險,避免緊迫局面;推理結(jié)果可表達(dá)為高層次語義信息,壓縮大量信息價值低的數(shù)據(jù),易于存儲、查詢和共享。
本文沒有考慮水文氣象等自然環(huán)境對船舶行為的影響,以后將研究氣象水文影響下的船舶行為語義模型。外界環(huán)境不一定是穩(wěn)態(tài)的,船舶行為的網(wǎng)絡(luò)結(jié)構(gòu)也可能隨時間變化而變化,因此需要建立變結(jié)構(gòu)、變參數(shù)的船舶行為模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
開放教育研究(2020年2期)2020-03-31 01:54:14
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
現(xiàn)代語文(2016年21期)2016-05-25 13:13:44
大連民族大學(xué)學(xué)報(2015年2期)2015-02-27 08:28:11
