四旋翼無人機(jī)飛行控制中四元數(shù)與歐拉角的轉(zhuǎn)換
2019-10-21 07:45:22陳孟臻
科學(xué)導(dǎo)報(bào)·學(xué)術(shù) 2019年45期
關(guān)鍵詞:無人機(jī)
陳孟臻
摘? 要:在四旋翼無人機(jī)飛行控制環(huán)路中,歐拉角便于終端輸出,適合人的直觀觀察和理解,方便人為調(diào)整姿態(tài)控制參數(shù),進(jìn)而調(diào)整四旋翼飛行姿態(tài),但是占用內(nèi)存較大。而四元數(shù)占用內(nèi)存少,且方便在環(huán)路控制中實(shí)現(xiàn)插值操作,因此可提高機(jī)器運(yùn)算速度,實(shí)現(xiàn)快速參數(shù)設(shè)定,因此研究四元數(shù)與歐拉角之間的轉(zhuǎn)換方式具有一定的研究意義。
關(guān)鍵詞:無人機(jī);姿態(tài);四元數(shù);歐拉角
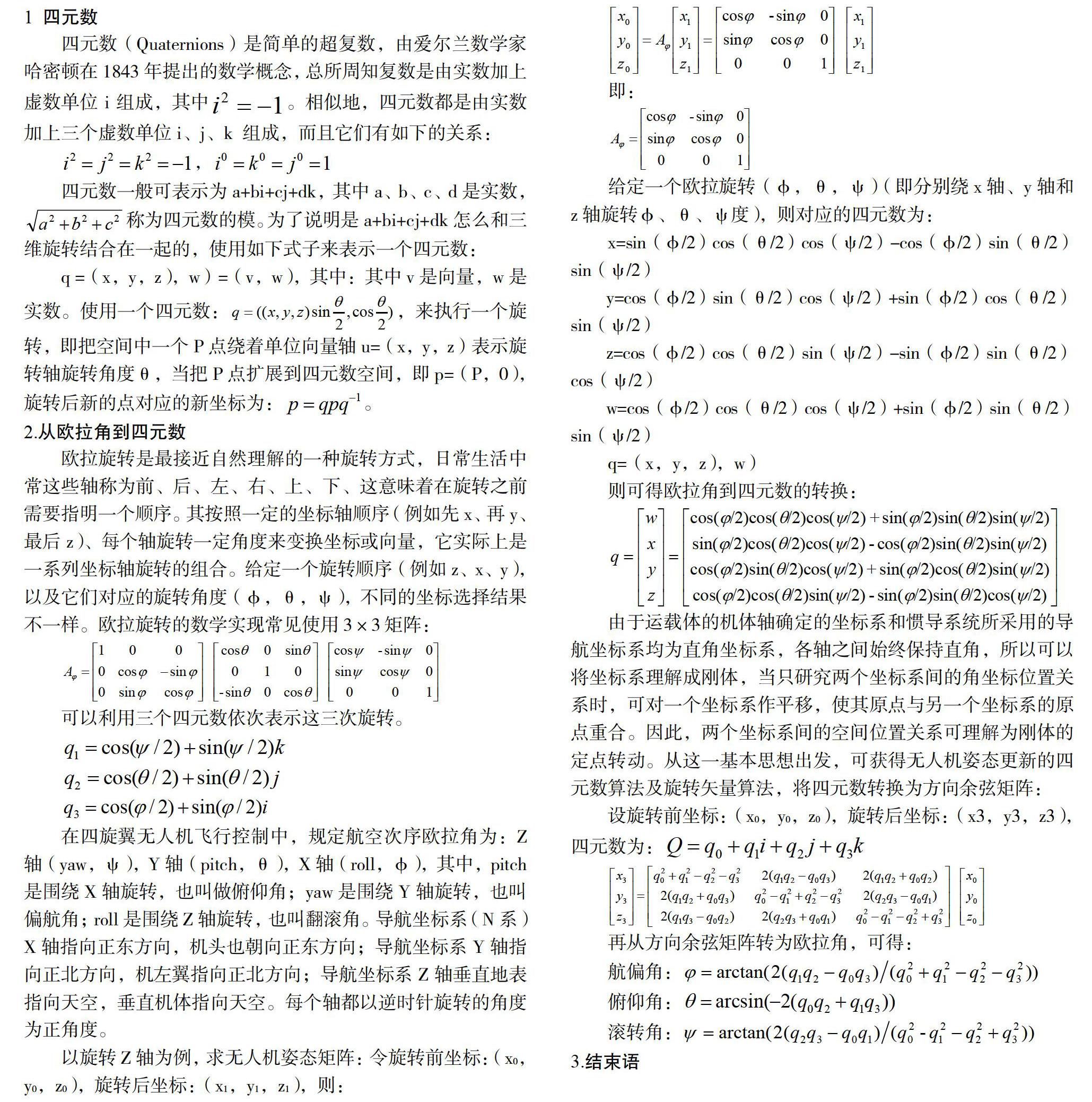
1 四元數(shù)
四元數(shù)(Quaternions)是簡(jiǎn)單的超復(fù)數(shù),由愛爾蘭數(shù)學(xué)家哈密頓在1843年提出的數(shù)學(xué)概念,總所周知復(fù)數(shù)是由實(shí)數(shù)加上虛數(shù)單位i組成,其中。相似地,四元數(shù)都是由實(shí)數(shù)加上三個(gè)虛數(shù)單位i、j、k 組成,而且它們有如下的關(guān)系:
四元數(shù)一般可表示為a+bi+cj+dk,其中a、b、c、d是實(shí)數(shù),稱為四元數(shù)的模。為了說明是a+bi+cj+dk怎么和三維旋轉(zhuǎn)結(jié)合在一起的,使用如下式子來表示一個(gè)四元數(shù):
q =(x,y,z),w)=(v,w),其中:其中v是向量,w是實(shí)數(shù)。使用一個(gè)四元數(shù):,來執(zhí)行一個(gè)旋轉(zhuǎn),即把空間中一個(gè)P點(diǎn)繞著單位向量軸u=(x,y,z)表示旋轉(zhuǎn)軸旋轉(zhuǎn)角度θ,當(dāng)把P點(diǎn)擴(kuò)展到四元數(shù)空間,即p=(P,0),旋轉(zhuǎn)后新的點(diǎn)對(duì)應(yīng)的新坐標(biāo)為:。
2.從歐拉角到四元數(shù)
歐拉旋轉(zhuǎn)是最接近自然理解的一種旋轉(zhuǎn)方式,日常生活中常這些軸稱為前、后、左、右、上、下、這意味著在旋轉(zhuǎn)之前需要指明一個(gè)順序。其按照一定的坐標(biāo)軸順序(例如先x、再y、最后z)、每個(gè)軸旋轉(zhuǎn)一定角度來變換坐標(biāo)或向量,它實(shí)際上是一系列坐標(biāo)軸旋轉(zhuǎn)的組合。給定一個(gè)旋轉(zhuǎn)順序(例如z、x、y),以及它們對(duì)應(yīng)的旋轉(zhuǎn)角度(φ,θ,ψ),不同的坐標(biāo)選擇結(jié)果不一樣。歐拉旋轉(zhuǎn)的數(shù)學(xué)實(shí)現(xiàn)常見使用3×3矩陣:
在四旋翼無人機(jī)飛行控制中,規(guī)定航空次序歐拉角為:Z軸(yaw,ψ),Y軸(pitch,θ),X軸(roll,φ),其中,pitch是圍繞X軸旋轉(zhuǎn),也叫做俯仰角;yaw是圍繞Y軸旋轉(zhuǎn),也叫偏航角;roll是圍繞Z軸旋轉(zhuǎn),也叫翻滾角。導(dǎo)航坐標(biāo)系(N系)X軸指向正東方向,機(jī)頭也朝向正東方向;導(dǎo)航坐標(biāo)系Y軸指向正北方向,機(jī)左翼指向正北方向;導(dǎo)航坐標(biāo)系Z軸垂直地表指向天空,垂直機(jī)體指向天空。每個(gè)軸都以逆時(shí)針旋轉(zhuǎn)的角度為正角度。
3.結(jié)束語
歐拉角容易理解,也有利于將旋轉(zhuǎn)分解為單個(gè)自由度,但按歐拉角旋轉(zhuǎn)時(shí),必須做三次旋轉(zhuǎn)并將它們相乘,內(nèi)存消耗大。在實(shí)踐中使用四元數(shù)更高效,因?yàn)樗脑獢?shù)只是一個(gè)旋轉(zhuǎn),同時(shí)計(jì)算機(jī)已經(jīng)編碼了正弦值和余弦值,因此它更便于計(jì)算機(jī)進(jìn)行運(yùn)算,解決了歐拉角運(yùn)算速度的問題,所以從四元數(shù)到矩陣的轉(zhuǎn)換是非常有效的。
參考文獻(xiàn)
[1]? 廉文昊,李波,葛國慶,張海濤.基于STM32的四軸飛行器運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)[J].科技風(fēng),2019(22):7.
[2]? 柴雙武,楊曉琴,郭旭煒.對(duì)偶四元數(shù)絕對(duì)定向迭代解法[J/OL].測(cè)繪科學(xué):1-10[2019-11-12].http://kns.cnki.net/kcms/detail/11.4415.P.20190523.1005.004.html.
[3]? 劉公緒,蔚保國,史凌峰,劉洪,何瑞,董亞軍.一種壓縮型全姿態(tài)角四元數(shù)的表示方法[J].西安電子科技大學(xué)學(xué)報(bào),2019,46(04):115-121.
[4]? 時(shí)琦.基于MPU6050的四軸飛行器姿態(tài)角解算[J].科學(xué)技術(shù)創(chuàng)新,2019(04):38-39.
基金項(xiàng)目:1.廣西壯族自治區(qū)教育廳項(xiàng)目:高校中青年教師基礎(chǔ)能力提升項(xiàng)目(KY2016LX339)2.廣西壯族自治區(qū)教育廳項(xiàng)目:廣西本科高校特色專業(yè)及實(shí)驗(yàn)實(shí)訓(xùn)教學(xué)基地(中心)建設(shè)——電子信息工程。
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
