關(guān)于高速多脈沖激光測(cè)距系統(tǒng)的研究
2019-10-21 08:03:50李麗孫西花孔明
科學(xué)與信息化 2019年6期
關(guān)鍵詞:卡爾曼濾波
李麗 孫西花 孔明


摘 要 在脈沖式激光測(cè)距系統(tǒng)中,系統(tǒng)對(duì)回波信號(hào)的采集受噪聲信號(hào)的影響,使得有用信號(hào)淹沒(méi)在噪聲信號(hào)中,引入測(cè)量誤差。針對(duì)該問(wèn)題本文高速采集系統(tǒng)對(duì)回波信號(hào)采用雙FPGA進(jìn)行2G的高速采樣,并引進(jìn)多脈沖相關(guān)疊加的方法,使得有用信號(hào)得到增強(qiáng),噪聲信號(hào)被相對(duì)削弱;并對(duì)疊加之后的信號(hào)進(jìn)行卡爾曼濾波,將無(wú)用的高頻噪聲信號(hào)濾掉,使得后端數(shù)據(jù)處理更加精確,進(jìn)而提高激光測(cè)距系統(tǒng)的測(cè)量精度和測(cè)量距離。在本文中采用兩片F(xiàn)PGA,一片為主芯片,一片為從芯片,進(jìn)行協(xié)調(diào)工作,實(shí)現(xiàn)高速AD采集,并進(jìn)行相應(yīng)的數(shù)據(jù)處理,使得系統(tǒng)達(dá)到高精度、遠(yuǎn)距離的測(cè)距效果。
關(guān)鍵詞 高速采集系統(tǒng);多脈沖相關(guān)疊加;卡爾曼濾波;激光測(cè)距
1系統(tǒng)結(jié)構(gòu)圖
該系統(tǒng)主要包括三個(gè)模塊:激光發(fā)射單元、激光接受單元以及邏輯控制與信息處理單元。中邏輯控制與信息處理單元分為主FPGA、從FPGA、DSP信息處理單元,主FPGA與從FPGA之間進(jìn)行相互通信,同時(shí)各自分別實(shí)現(xiàn)1G的采樣速率,并分別做多脈沖互相關(guān)疊加運(yùn)算,將運(yùn)算結(jié)果存儲(chǔ)在公共的DDR中,實(shí)現(xiàn)2G的采樣速率。DSP再對(duì)共用DDR中的數(shù)據(jù)進(jìn)行卡爾曼濾波[1],使波形更加趨于理想化,進(jìn)而進(jìn)行閥值檢測(cè)得到運(yùn)算結(jié)果。
2多脈沖相關(guān)累加算法
在脈沖激光測(cè)距系統(tǒng)中,由于有用信號(hào)的相關(guān)性極強(qiáng),而噪聲信號(hào)不存在相關(guān)性,將多個(gè)回波信號(hào)按照相關(guān)性進(jìn)行相關(guān)性疊加,可以大大提高疊加之后信號(hào)的信噪比,進(jìn)而提升系統(tǒng)的抗干擾能力。如式(1)所示
3高速數(shù)據(jù)采集方案實(shí)現(xiàn)
該部分實(shí)現(xiàn)對(duì)回波信號(hào)的數(shù)據(jù)采集,到達(dá)2G的采樣速率,由于FPGA處理速度的限制,該模塊使用2塊FPGA分別控制一個(gè)高速AD采樣芯片ADC08D1000對(duì)回波信號(hào)進(jìn)行采樣[4],兩片F(xiàn)PGA進(jìn)行信息通信,以達(dá)到協(xié)同工作的目的,同時(shí)為了減輕數(shù)據(jù)采集模塊的運(yùn)算負(fù)擔(dān),引進(jìn)DSP模塊,數(shù)據(jù)處理部分在DSP中進(jìn)行。如圖3所示,主FPGA控制從FPGA采樣延后s,進(jìn)而達(dá)到2G的采樣速率。
4卡爾曼濾波器的DSP實(shí)現(xiàn)
卡爾曼濾波分為三個(gè)階段:預(yù)測(cè)、轉(zhuǎn)換和矯正[5]。DSP程序?qū)崿F(xiàn)過(guò)程如圖4所示,在預(yù)測(cè)階段,使用狀態(tài)預(yù)測(cè)方程對(duì)當(dāng)前的狀態(tài)進(jìn)行計(jì)算,得到后一個(gè)狀態(tài)的距離及其協(xié)方差的預(yù)測(cè)值。在轉(zhuǎn)換階段將預(yù)測(cè)階段得到的預(yù)測(cè)值轉(zhuǎn)換為卡爾曼濾波修正系數(shù),最后在矯正階段根據(jù)預(yù)測(cè)階段的預(yù)測(cè)值和轉(zhuǎn)換階段的修正系數(shù)得到后一階段的狀態(tài)及協(xié)方差矯正值[6]。
其中,和分別為狀態(tài)變量和觀測(cè)變量;和分別為系統(tǒng)的狀態(tài)轉(zhuǎn)換矩陣和控制輸入變量;以及維度轉(zhuǎn)換參數(shù)矩陣,系統(tǒng)過(guò)程激勵(lì)噪聲,觀測(cè)噪聲。
假設(shè)為當(dāng)前的狀態(tài),則可根據(jù)目前的的狀態(tài)預(yù)測(cè)出狀態(tài),相關(guān)方程如式(10)和式(11):
其中,為各種狀態(tài)下的距離結(jié)果;為各種狀態(tài)結(jié)果對(duì)應(yīng)的協(xié)方差;,為當(dāng)前狀態(tài)經(jīng)過(guò)卡爾曼濾波優(yōu)化處理得到的距離結(jié)果以及相應(yīng)協(xié)方差;,為根據(jù)當(dāng)前狀態(tài)預(yù)測(cè)的距離結(jié)果以及相應(yīng)協(xié)方差;為后一狀態(tài)的控制量,DSP程序設(shè)計(jì)過(guò)程中,根據(jù)控制量的輸入情況,對(duì)進(jìn)行設(shè)置;為狀態(tài)轉(zhuǎn)換矩陣;是系統(tǒng)過(guò)程的協(xié)方差。則得到卡爾曼修正系數(shù),如式(12)所示:
其中表示預(yù)估距離值和觀測(cè)結(jié)果之間的維數(shù)轉(zhuǎn)換關(guān)系,為觀測(cè)噪聲協(xié)方差矩陣。根據(jù)觀測(cè)量的輸入值,以及距離結(jié)果的預(yù)估值,可以得到經(jīng)卡爾曼濾波后的距離及相應(yīng)的協(xié)方差,如式(13)和式(14)所示:
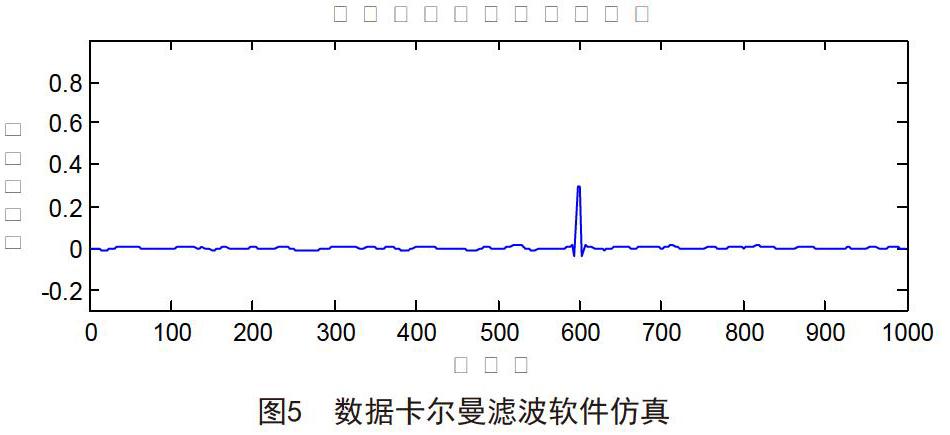
為經(jīng)過(guò)DSP結(jié)算得到的距離初值,也是DSP模塊的輸入觀測(cè)值,因?yàn)閰f(xié)方差更新公式中進(jìn)行的是一維數(shù)組的測(cè)量且為單模量,所以設(shè)置為1。(8)式和(9)式中,根據(jù)白噪聲的特點(diǎn),設(shè)定和的初始值為0,后期根據(jù)實(shí)驗(yàn)對(duì)其進(jìn)行修正。對(duì)本文中三次脈沖疊加之后的數(shù)據(jù),進(jìn)行卡爾曼濾波,仿真結(jié)果如圖5所示:
由仿真結(jié)果可以看到,多脈沖相關(guān)累加信號(hào)經(jīng)過(guò)卡爾曼濾波之后,噪聲信號(hào)基本被濾掉,有用信號(hào)更加清晰可見(jiàn),進(jìn)而使得后端對(duì)數(shù)據(jù)的處理更加準(zhǔn)確。
5試驗(yàn)結(jié)果分析
根據(jù)測(cè)量結(jié)果需求對(duì)近距離和遠(yuǎn)距離的情況分別進(jìn)行試驗(yàn),為了減小測(cè)量帶來(lái)的誤差,對(duì)每次試驗(yàn)分別進(jìn)行7次測(cè)量,然后針對(duì)這7次測(cè)量結(jié)果進(jìn)行均值處理,近距離和遠(yuǎn)距離激光測(cè)距結(jié)果如表1所示。
針對(duì)近距離測(cè)試,選取50m的距離進(jìn)行測(cè)量,如表所示,測(cè)量7組數(shù)據(jù),然后對(duì)該7組數(shù)據(jù)求取平均值,最終測(cè)量結(jié)果為49.98714,測(cè)量誤差為0.01286m。遠(yuǎn)距離測(cè)試,選取2855m的距離進(jìn)行測(cè)量實(shí)驗(yàn),同樣對(duì)該7組的數(shù)據(jù)進(jìn)行平均值處理,最終測(cè)量結(jié)果為2854.371,測(cè)量誤差為0.629m.
根據(jù)仿真結(jié)果可以看出采用雙FPGA對(duì)回波信號(hào)進(jìn)行交替采樣,可以實(shí)現(xiàn)雙倍的采樣速率增大測(cè)量的精確度;然后對(duì)采樣的回波信號(hào)進(jìn)行多脈沖疊加,由DSP實(shí)現(xiàn)對(duì)疊加后的信號(hào)進(jìn)行卡爾曼濾波,使得有用信號(hào)更加容易分辨。經(jīng)測(cè)試在近距離和遠(yuǎn)距離測(cè)量中均具有極高的精度。
參考文獻(xiàn)
[1] 高勤,李志強(qiáng),都學(xué)新.一種新型自適應(yīng)卡爾曼濾波算法[J].現(xiàn)代雷達(dá),2001,23(6):29-34.
[2] 倪旭翔,胡凱.脈沖串互相關(guān)方法在遠(yuǎn)程激光測(cè)距中的應(yīng)用[J].光學(xué)學(xué)報(bào),2012,32(11):120-125.
[3] 黃本雄,侯潔,胡海.高斯白噪聲發(fā)生器在FPGA中的實(shí)現(xiàn)[J].微計(jì)算機(jī)信息,2007,23(20):165-167.
[4] 常高嘉,馮全源.基于FPGA的高速數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].電子器件,2012,35(5):217-220.
[5] 邱曉波,謝志宏,周啟煌.由DSP技術(shù)實(shí)現(xiàn)卡爾曼濾波算法初探[J].火力與指揮控制,1999,24(1):66-72.
[6] 鄒振宇.基于DSP的Kalman濾波器的算法研究[D].成都:成都理工大學(xué),2012.
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國(guó)慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36