基于Laguerre函數(shù)的BLDCM轉(zhuǎn)速預(yù)測控制器
2019-09-19 09:39:16偉1濤1高嚴(yán)凱
測控技術(shù) 2019年6期
關(guān)鍵詞:模型
郭 偉1,,姜 睿,李 濤1,,高嚴(yán)凱
(1.大氣環(huán)境與裝備技術(shù)協(xié)同創(chuàng)新中心,江蘇 南京 210044; 2.南京信息工程大學(xué) 自動化學(xué)院,江蘇 南京 210044)
無刷直流電機(Brushless DC Motor,BLDCM)因具有結(jié)構(gòu)簡單、運行效率高等優(yōu)勢,在精密機床、汽車電子、航空航天等領(lǐng)域得到廣泛應(yīng)用[1]。傳統(tǒng)BLDCM控制器多基于線性理論設(shè)計,但由于模型中存在R、L等慢時變參數(shù),故解耦簡化得到的模型勢必不能滿足不同工況調(diào)速的需求[2]。
針對上述問題,許多學(xué)者將自適應(yīng)機制引入控制器設(shè)計中,將非線性時變參數(shù)看作擾動項,設(shè)計自適應(yīng)觀測器或濾波器進行估計[3-5],但大多會假設(shè)未估計量變化率為零,且觀測器本身會帶來系統(tǒng)延遲,這都會影響參數(shù)辨識精度,進而導(dǎo)致控制誤差。因此,可根據(jù)實時信息在線辨識模型參數(shù)的控制器設(shè)計顯得尤為重要。
近年來,隨著微處理器(如DSP、FPGA等)性能的大幅提升,預(yù)測控制算法在電力電子和電機驅(qū)動領(lǐng)域得到廣泛關(guān)注[6-7],設(shè)計簡單、動態(tài)性能好等特點使該方法成為電機控制領(lǐng)域最有可能替代PI算法的控制方案[8]。文獻[9]用電流預(yù)測控制器替代了傳統(tǒng)PI電流調(diào)節(jié)器,有效抑制了電流紋波。GPC作為一種結(jié)合自校正思想的預(yù)測控制算法[10],具有建模與控制于一體的特點,自Clarke提出以來30多年,已有眾多學(xué)者對其進行了改進優(yōu)化。文獻[11]從預(yù)測模型著手,利用ARMAX模型描述動態(tài)對象,并在此基礎(chǔ)上推導(dǎo)得出可直接求解控制量的廣義預(yù)測控制器。文獻[12]將優(yōu)化后的廣義預(yù)測控制應(yīng)用于無刷直流電機速度控制中,并在DSP實驗箱中進行了算法驗證,證實該算法在快速系統(tǒng)中應(yīng)用的可行性。針對原始GPC和文獻[11]中所提算法需引入丟番圖方程求解計算量大的問題,文獻[13]利用遞推的方法得到預(yù)測模型,求解過程簡單,更易于硬件實現(xiàn)。文獻[14]將ARMAX模型轉(zhuǎn)換成狀態(tài)空間方程形式,并將Laguerre函數(shù)引入來解決傳統(tǒng)模型預(yù)測控制不能保證無差拍控制的缺點。
調(diào)速性能和轉(zhuǎn)矩波動一直是衡量BLDCM運行性能的兩個重要指標(biāo),本文主要研究BLDCM控制系統(tǒng)的調(diào)速性能。為進一步減小算法計算量,滿足電機控制實時性要求,本文在文獻[13]提出的簡化GPC基礎(chǔ)上,引入Laguerre函數(shù)對控制增量進行參數(shù)化,針對傳統(tǒng)GPC算法普遍存在超調(diào)的問題,借鑒文獻[18]中修改性能指標(biāo)的思想,以期結(jié)合PI算法的優(yōu)勢,提出了一種新型的控制算法,最后將其應(yīng)用在BLDCM轉(zhuǎn)速跟蹤控制中,并與文獻[13]所提算法進行比較。Matlab平臺仿真結(jié)果表明,相比文獻[13]提出的算法,該算法對跟蹤指令響應(yīng)更快,超調(diào)小,抗干擾能力強,對參數(shù)不確定性具有較強的魯棒性。
1 BLDCM模型
傳統(tǒng)BLDCM控制策略為雙閉環(huán)控制結(jié)構(gòu),內(nèi)環(huán)電流環(huán)主要作用為限制電流,保證系統(tǒng)穩(wěn)定運行[15]。實際應(yīng)用中,轉(zhuǎn)速單環(huán)控制器已能滿足絕大多數(shù)運行情況[16],故本文采用單環(huán)控制器,在此推導(dǎo)BLDCM空載運行時的傳遞函數(shù)[1]。
以A、B導(dǎo)通為例,不計換相暫態(tài)過程,則有
(1)
式中,Ud為直流母線電壓;ra為繞組線電阻,ra=2R;La為繞組等效線電感,La=2(L-M);ke為線反電勢系數(shù)。
由電機運動方程可得空載情況下的電樞電流為
(2)
式中,KT為電機轉(zhuǎn)矩系數(shù);J為轉(zhuǎn)子轉(zhuǎn)動慣量;Bv為黏滯摩擦系數(shù)。
將式(2)代入式(1)中,并做Laplace變換可得BLDCM傳遞函數(shù)為
(3)
因有Ω=2πn/60,故機械角速度與轉(zhuǎn)速之間呈線性關(guān)系,其中轉(zhuǎn)速n單位為r/min。
2 控制增量Laguerre化的預(yù)測控制
2.1 離散Laguerre函數(shù)
連續(xù)型Laguerre函數(shù)是平方可積函數(shù)空間L2(0,∞)上的一組正交基,將其z變換離散化后可寫為[17]
(4)
式中,a為離散Laguerre函數(shù)的極點,0≤a<1。
注意到有如下遞推關(guān)系:
(5)

用l1(k)表示Γ1(z)的z逆變換,則有
L(k)=[l1(k),l2(k),…,lN(k)]T
那么式(5)滿足
L(k+1)=ψL(k)
(6)
且有
(7)
式中,ψ為N×N的矩陣;β=1-α2。
2.2 改進的廣義預(yù)測控制
被控對象ARMAX模型可表示為[13]
(8)
式中,y(k)、u(k)和ξ(k)分別為輸出、控制和白噪聲,d+1為時滯;其中參數(shù)可由下式遞推得出:
(9)
式中,n=min{w-1,na}。
預(yù)測模型為
Y=Ym+GΔU
(10)
Y=[y(k+d+1|k),y(k+d+2|k),…,y(k+p|k)]T
Ym=[ym(k+d+1),y(k+d+2),…,y(k+p)]T
ΔU=[Δu(k),Δu(k+1),…,Δu(k+p-d-1)]T
(11)
式中,p為預(yù)測長度。其中,

需要注意的是,令式(9)第二個式子中i=0可快速遞推出矩陣G中元素。
極小化性能指標(biāo)
(12)
式中,λ為控制加權(quán)系數(shù);參考軌跡Yr計算具體見文獻[19]。
由?J/?ΔU=0可得
ΔU=(GTG+λI)-1GT(Yr-Ym)
(13)
則即時控制增量為
Δu(k)=fT(Yr-Ym)
式中,fT=[1 0 … 0][GTG+λI]-1GT。
由此可得控制量為
游客們對三峽地區(qū)歷史文化的認(rèn)知主要是巴蜀文化和巫文化。原始的巴人部落、舞蹈表演和神秘的巫文化祭祀活動構(gòu)成了游客們對三峽地區(qū)古代文明的體驗,幫助游客更好地理解遙遠的歷史文化。一位廣西的年輕游客描述了印象深刻的巫文化祭祀表演:
u(k)=u(k-1)+Δu(k)
(14)
相比于Clarke提出的原始形式廣義預(yù)測控制算法,該算法的預(yù)測模型計算借鑒了動態(tài)矩陣控制,無需引入丟番圖方程,求解過程更加簡潔,編程易實現(xiàn)。
2.3 控制增量Laguerre化的PI型廣義預(yù)測控制
算法最終會在嵌入式場合實現(xiàn),為進一步減小算法計算量,本文將離散Laguerre函數(shù)引入上述算法,并與PI型性能指標(biāo)結(jié)合。
在k時刻,控制增量軌跡Δu(k),Δu(k+1),…,Δu(k+j)可以看作是一個穩(wěn)定動態(tài)系統(tǒng)的脈沖響應(yīng),因此,可將Laguerre函數(shù)應(yīng)用于控制增量的參數(shù)化設(shè)計,即利用l1(k),l2(k),…,lN(k)捕獲一系列與系統(tǒng)脈沖響應(yīng)有關(guān)的系數(shù)c1,c2,…,cN[17]。與預(yù)測函數(shù)控制類似,該函數(shù)的引入使得算法對控制量的求解從控制量本身轉(zhuǎn)移到了組合系數(shù)的優(yōu)化,由于這些系數(shù)個數(shù)少且與預(yù)測長度無關(guān),因而可以減少在線優(yōu)化的計算量[10]。
控制增量Laguerre化過程如下
(15)
式中,L(j)=[l1(j),l2(j),…,lN(j)]T;η=[c1,c2,…,cN]T。
設(shè)定參考軌跡與預(yù)測輸出間誤差為
e(k+j)=yr(k+j)-y(k+j|k)
則有
Δe(k+j)=e(k+j)-e(k+j-1)=Δyr(k+j)-Δy(k+j|k)
工業(yè)控制中常選取PI型性能指標(biāo)[18],故本文修改性能指標(biāo)如下:
ki(j)e2(k+d+j)+r(j)Δu2(k+j-1)
(16)
式中,kp(j)、ki(j)和r(j)分別為輸出誤差和控制增量加權(quán)系數(shù),假設(shè)為常數(shù)kp、ki和r。
為推導(dǎo)方便,將該性能指標(biāo)改寫成矩陣形式
(17)

定義L=[L(0)T,L(1)T,…,L(p-d-1)T]T,則控制增量可寫為
ΔU=Lη
(18)
將式(18)代入式(17),由最小二乘法可得
(19)
式中,μ=LTGTHGL+LTRL;β=LTGTH+LTGTHT;H=TTKpT+Ki。
因而可得即時控制量為
u(k)=u(k-1)+Δu(k)=u(k-1)+L(0)Tη
(20)
當(dāng)對象參數(shù)(式(8))未知時,可采用漸消記憶最小二乘法進行參數(shù)估計[19],很多情況下,由于在線辨識的復(fù)雜性,用參考軌跡實現(xiàn)反饋校正。
采用上述算法設(shè)計BLDCM轉(zhuǎn)速控制器,控制系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
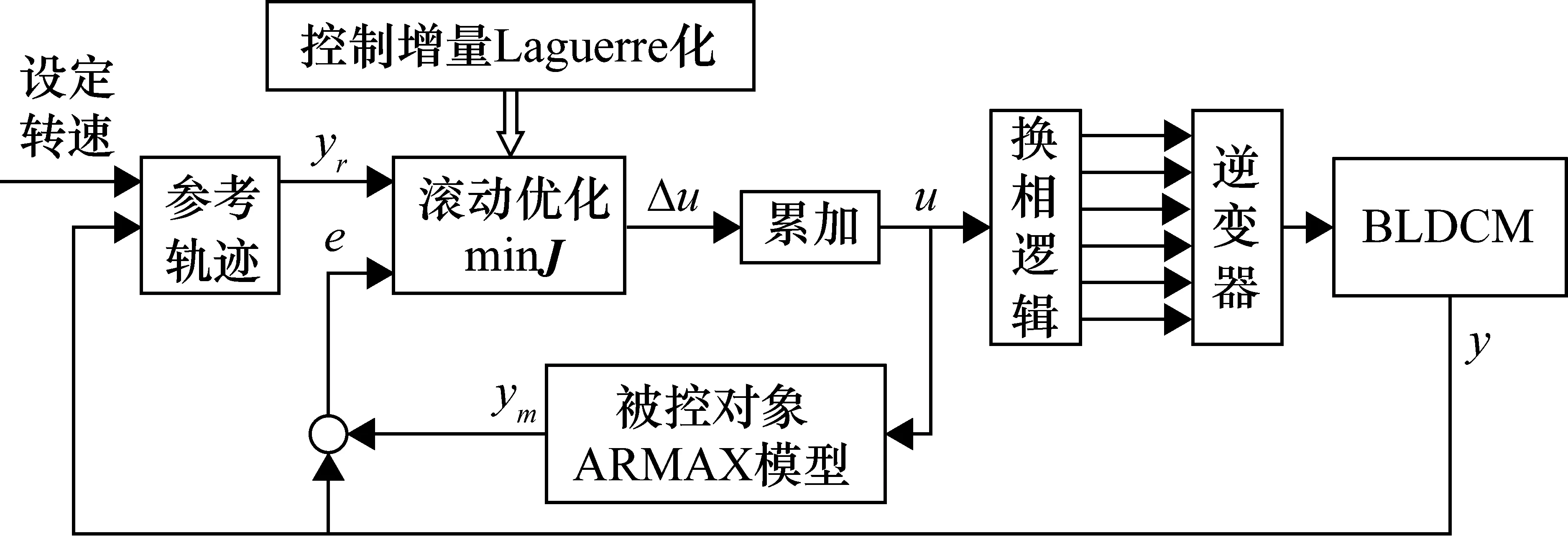
圖1 控制系統(tǒng)結(jié)構(gòu)框圖
3 仿真結(jié)果與分析
將電機空載運行時采集到的輸入輸出數(shù)據(jù)導(dǎo)入Matlab系統(tǒng)辨識工具箱,可得被控對象為[20]
y(k)-0.4288y(k-1)-0.5665y(k-2)=
1.875u(k-1)-1.87u(k-2)+ξ(k)
式中,ξ(k)為方差為0.01的白噪聲。
為驗證新型算法的可行性,在Intel酷睿i7處理器、64位8 GB系統(tǒng)、Matlab版本R2016a的環(huán)境下進行仿真,仿真總時長0.063 s。所提出的算法參數(shù)選為:預(yù)測長度p=3;Laguerre函數(shù)參數(shù)a=0.2,N=5;加權(quán)矩陣Kp=Ki=diag{0.2,0.2,0.2},R=diag{0.5,0.5,0.5};柔化系數(shù)α=0.7。
下面對電機在變速、受擾和模型失配3種工況下的控制性能進行比較。
圖2為文獻[13]改進GPC與所提出的算法在調(diào)速性能上的比較。電機起動時轉(zhuǎn)速設(shè)定值為2500 r/min,在0.2 s時設(shè)為2000 r/min,由圖1可知,新型算法在起動時幾乎無超調(diào),控制增量在0.012 s迅速收斂至零,且跟蹤轉(zhuǎn)速更為迅速,變速運行時依舊能保持很好的跟蹤性能。
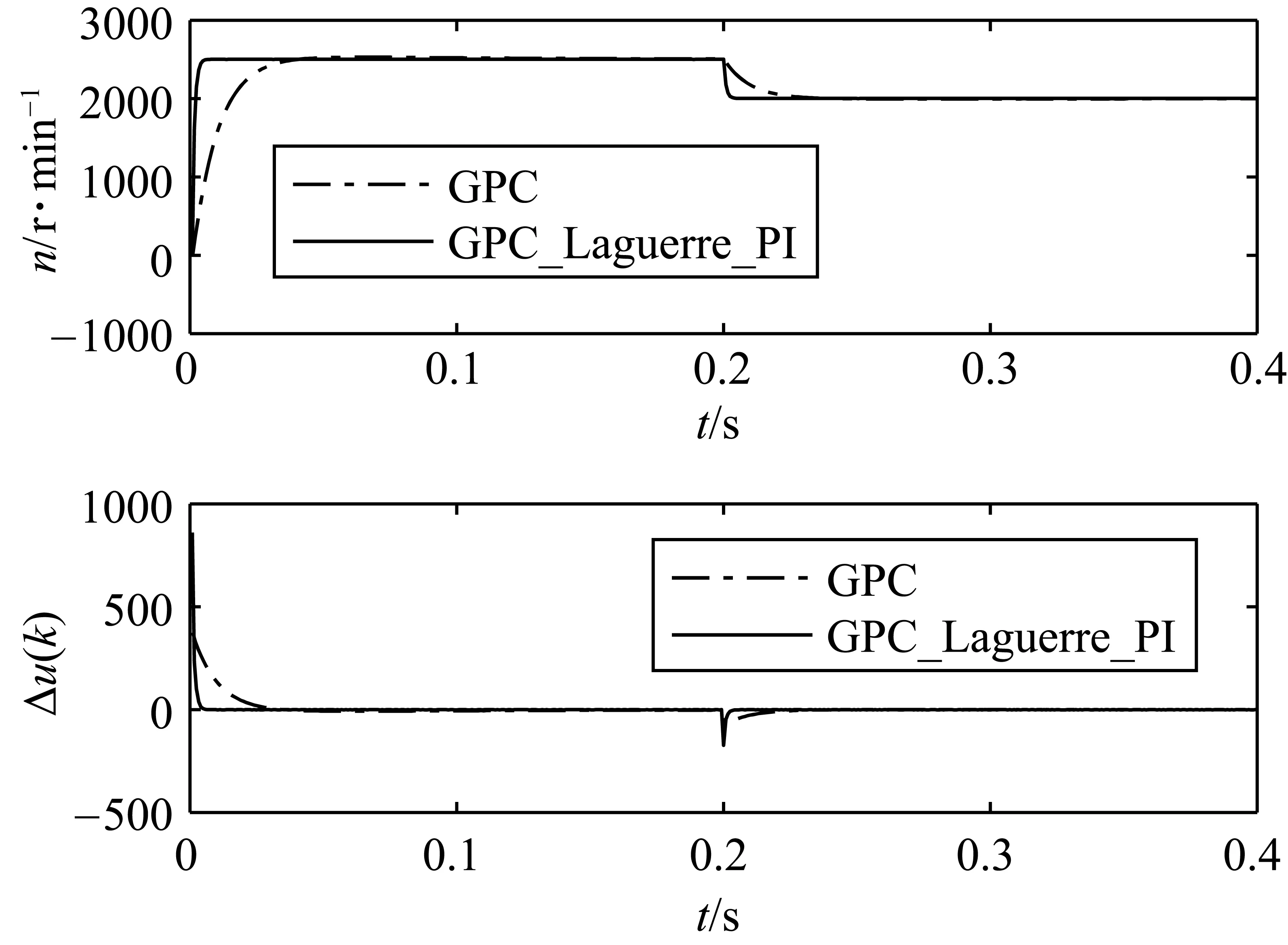
圖2 調(diào)速性能比較
圖3、圖4為4種算法下抗干擾能力的比較。由圖可知,電機起動時,4種算法中GPC_Laguerre_PI響應(yīng)最快,GPC_Laguerre緊跟其后,GPC_PI次之,最后則是改進GPC算法。在0.2 s時給系統(tǒng)加入擾動,GPC_Laguerre波動之后能迅速恢復(fù)到設(shè)定轉(zhuǎn)速,GPC_Laguerre_PI抗干擾能力與之相當(dāng),最后則是GPC_PI。
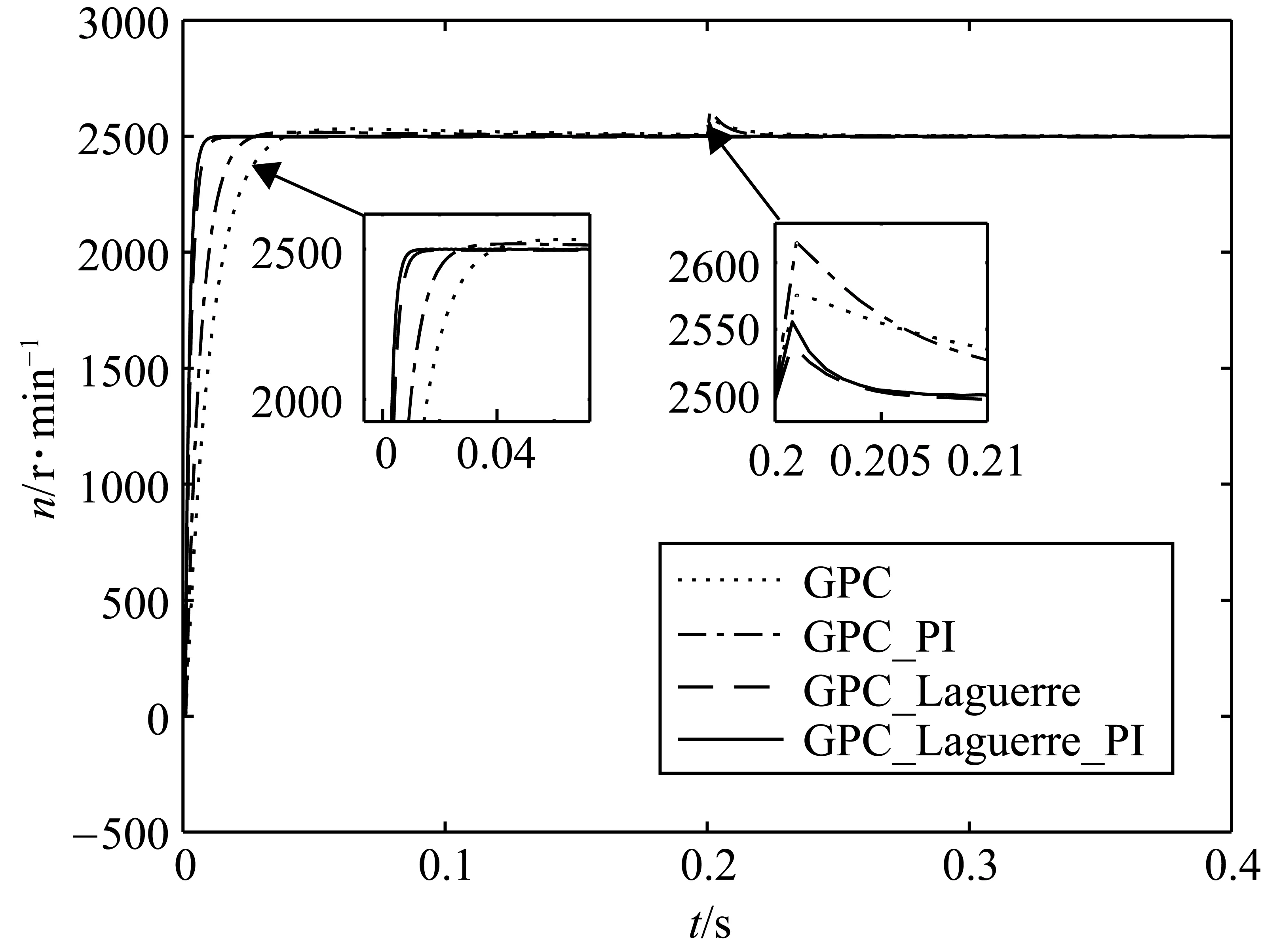
圖3 抗干擾能力比較(轉(zhuǎn)速分析)
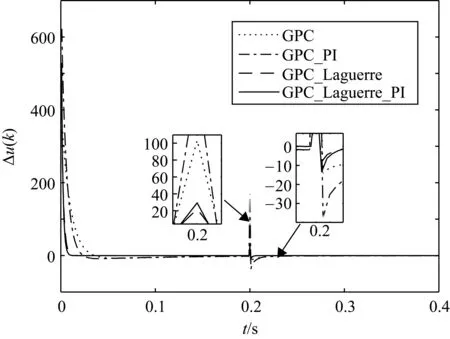
圖4 抗干擾能力比較(控制增量分析)
圖5為4種算法在模型失配情況下的控制性能比較。由圖可知,GPC和GPC_PI兩種算法受預(yù)測模型失配影響非常大,而控制增量Laguerre化后的兩種改進GPC算法則幾乎不受該工況影響。其中,模型失配時,GPC_Laguerre_PI算法控制效果最好。
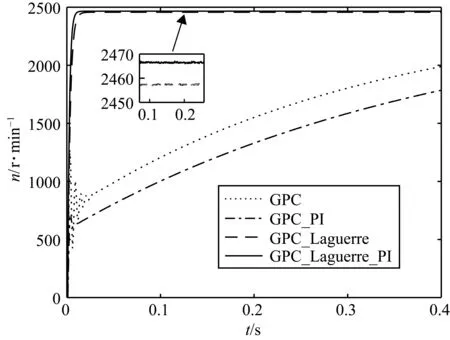
圖5 模型失配比較
圖6為Laguerre函數(shù)中a參數(shù)變化的比較。由圖6可知,當(dāng)a=0.8時,系統(tǒng)響應(yīng)最快,但存在抖動,實際中不利于電機控制。當(dāng)a=0.2時,雖響應(yīng)較慢,但控制器可以準(zhǔn)確跟蹤設(shè)定轉(zhuǎn)速值2500 r/min,因此本文調(diào)參時選用a=0.2。
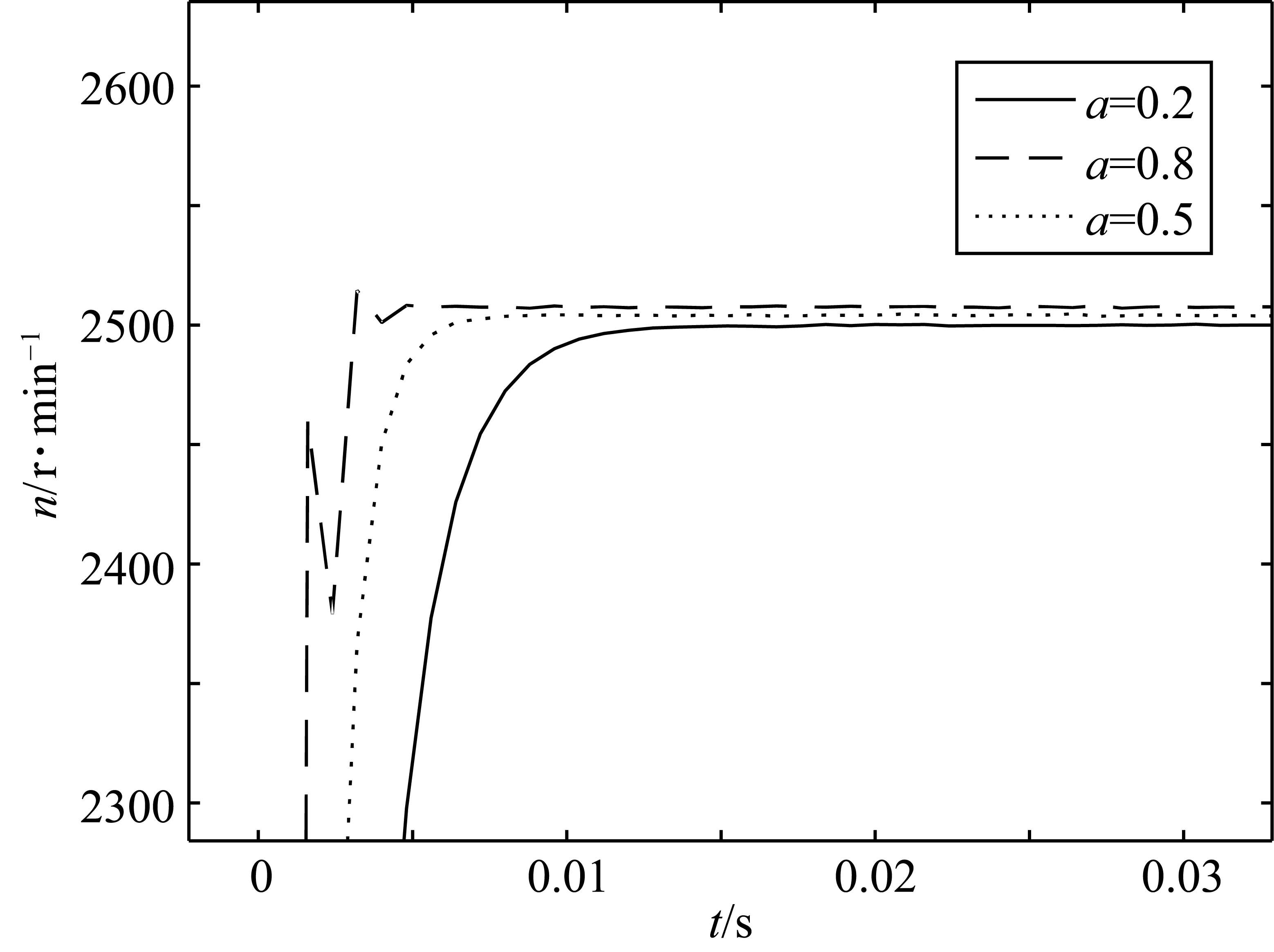
圖6 Laguerre函數(shù)參數(shù)a變化比較
4 結(jié)束語
本文在改進GPC算法基礎(chǔ)上引入Laguerre函數(shù)對控制增量進行參數(shù)化,使系統(tǒng)響應(yīng)更迅速;通過修改PI型性能指標(biāo),抑制了超調(diào),得到更好的穩(wěn)定性。用改進后新型的控制算法設(shè)計了無刷直流電機轉(zhuǎn)速單環(huán)控制器,并在Matlab平臺進行驗證。仿真結(jié)果表明,該算法具有良好的控制品質(zhì)。本文減少了電流環(huán)對最大電流的限制,若能將電流約束引入算法推導(dǎo)中,還需結(jié)合優(yōu)化算法做進一步的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19