基于激光線輔助的大型鑄鍛件視覺三維建模方法
2019-09-17 11:20:50陳昌海郭杰向守兵胡明華
科技資訊 2019年19期
陳昌海 郭杰 向守兵 胡明華


摘 ?要:該文使用激光線輔助視覺三維建模方法對大型鑄鍛件表面信息進行三維重建,研究了逆向三維建模的主要算法,對整個三維建模流程進行了分析,并對大型鑄鍛件三維建模進行了掃描實驗和誤差分析。實驗結果表明,使用激光線輔助視覺三維建模方法可以實現對大型鑄鍛件的高精度三維建模,當激光線掃描寬度限定為100mm內時,可以實現0.1mm的建模精度。
關鍵詞:激光線輔助 ?鑄鍛件 ?三維建模 ?建模精度
中圖分類號:TN911.22 ? 文獻標識碼:A 文章編號:1672-3791(2019)07(a)-0013-03
近年來,隨著工業機器人的大規模應用,人們對工業生產中進行逆向建模的需求越來越大,研究物體表面三維重建的視覺三維建模技術成為研究熱點。基于雙目視覺的視覺三維建模技術在商業領域有著廣泛的應用,但是由于其建模精度和抗干擾能力無法滿足大多數工業現場要求,使得其在工業領域的應用嚴重受限。基于結構光的視覺三維建模技術由于其建模精度高且抗干擾能力強,成為了當前工業現場進行三維重建的主要方法,越來越受到人們的重視。
基于結構光的視覺三維建模技術[1]可以通過激光線掃描的方式獲得物體表面的三維信息。這一技術主要分為3個部分,首先是相機參數[2]和激光平面信息[3]的標定,然后是激光線條的提取和處理,最后是物體表面的三維重建。該文以大型鑄鍛件表面三維建模為例,說明基于結構光的視覺三維建模技術的關鍵技術。
1 ?相機參數和激光平面信息的標定
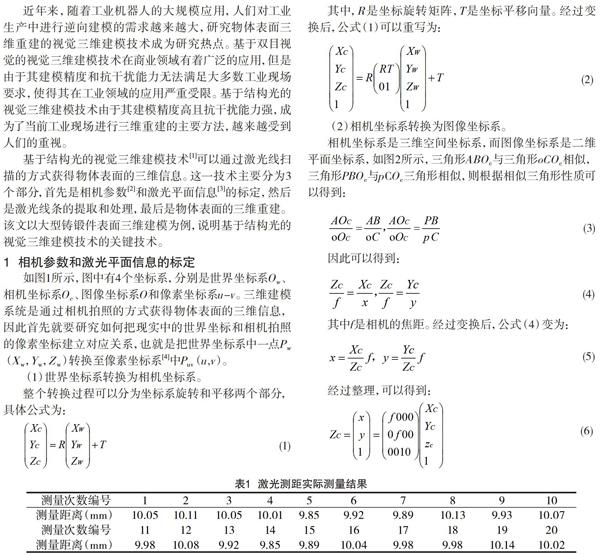
如圖1所示,圖中有4個坐標系,分別是世界坐標系Ow、相機坐標系Oc、圖像坐標系O和像素坐標系u-v。三維建模系統是通過相機拍照的方式獲得物體表面的三維信息,因此首先就要研究如何把現實中的世界坐標和相機拍照的像素坐標建立對應關系,也就是把世界坐標系中一點Pw(Xw,Yw,Zw)轉換至像素坐標系[4]中Puv(u,v)。
2 ?大型鑄鍛件三維建模效果
對大型鑄鍛件三維建模需要先進行相機參數和激光平面的標定,在獲得這些基本信息后,使用機器人機械臂夾持相機和線激光發生器對目標鑄鍛件進行掃描。具體流程見表3。
在激光線對鑄鍛件掃描過程中,機器臂每移動1mm就控制相機拍一張照片,照片上有著激光線在像素坐標的投影,也就是可以通過拍照獲得激光線上各點在像素坐標系下的像素坐標(u,v)。然后通過上文的計算方式,對鑄鍛件表面激光線上各點的像素坐標(u,v)逆求世界坐標(Xw,Yw,Zw),可以得到鑄鍛件表面激光線上各點的三維信息,最后通過對各條激光線三維信息的組合得到鑄鍛件的完整三維模型[6]。大型鑄鍛件三維建模效果如圖4所示,圖中顯示了三維模型在不同方向的側視圖。
大型鑄鍛件的體積較大,為了保證三維建模精度,需要對大型鑄鍛件的表面區域進行劃分,相機拍照區域的實際寬度為100mm,使用的相機為1500萬像素工業相機,拍照寬度方向上像素為4100個像素,單個像素的像素精度為0.024mm。經過對激光平面標定結果進行測量,標定精度為0.03mm,理論上三維建模的精度最大為0.054mm。建模使用的機器人是kuka機器人,運動精度為0.04mm,所以最終三維建模的最終精度可以確保在0.1mm以內。事實上可以通過對三維模型進行三維濾波[5]的方式進一步提升建模精度,降低建模誤差,進過數據對比,可以降低37%的建模誤差。為了對實際建模誤差進行測量,對大型鑄鍛件三維模型進行路徑規劃,然后發送給機器人,對機器臂的運動軌跡與大型鑄鍛件的距離進行實際測量,最終確定實際誤差的大小。使用激光測距的方式對三維建模誤差進行測量,通過多次測量求平均的方式計算平均誤差。設定機器臂夾持激光測距傳感器測距起始位置距離鑄鍛件表面距離為10mm,表1所示為對20處不同位置進行激光測距的測量結果,從測量結果可以看到,多數測量結果的誤差在0.1mm以內,少量幾次測量結果的誤差在0.1~0.2mm之間,通過求平均的方式可以得到平均誤差為0.074mm。
3 ?結語
該文通過基于激光線輔助視覺三維建模的方式對大型鑄鍛件進行三維建模,實驗結果表明,當對掃描區域進行寬度限制的前提下,可以實現高精度的三維建模,最終將三維建模精度控制在0.1mm以內。而實際上,大型鑄鍛件的三維建模往往不要求如此高的建模精度,因此可以根據實際需要放寬對掃描區域寬度的限制,從而提高掃描速度。
參考文獻
[1] 冀光強.基于線結構光掃描的水下三維重建技術[D].中國海洋大學,2013.
[2] 錢麗丹,楊軍偉.基于精密運動的激光平面標定方法[J].計算機工程,2013,39(4):318-320.
[3] 周富強,王飛,張廣軍.結構光直線光條圖像特征的三步法提取[J].機械工程學報,2008,44(11):215-219.
[4] 胡坤,周富強.一種條紋中心線快速亞像素提取方法[J].光電技術應用,2005,20(6):60-63.
[5] 杜小燕,姜曉峰,郝傳剛,等.點云模型的雙邊濾波去噪算法[J].計算機應用與軟件,2010(7):245-246.
[6] 周富強,李章,張廣軍.基于三維測量掃描線點云的表面重建[J].儀器儀表學報,2006,27(6):619-623.
