基于支持向量機的高速滑行艇航態優化
2019-09-12 02:47:50
船海工程 2019年4期
(大連理工大學 a.船舶工程學院;b.工業裝備結構分析國家重點實驗室,遼寧 大連 116024)
高速滑行艇穩定滑行時,當航速過高或重心位置過于靠向船艉時,滑行艇很可能縱向運動失穩而發生“海豚運動”。在滑行艇縱向運動穩定性研究方面,主要采用Routh-Hurwitz判據法,通過計算各項水動力系數,判定滑行艇在某工況下是否會發生“海豚運動”。本文的研究目的是優化“航速-重心”組合,在保障高速滑行艇縱向運動穩定性的同時獲取更佳的水動力性能。以一艘高速滑行艇為研究對象,以體積弗勞德數Fr▽及重心縱向位置lcg為設計變量進行實驗設計(design of experiment,DOE),采用經過驗證的CFD計算法對樣本點進行數值計算,隨后引入支持向量機(SVM)法擬合各個航態之間的分界線,并提出基于“偏離度約束”的SVM,通過引入偏離度打分及距離約束改進邊界的擬合方法。
1 數值計算方法及驗證
為確保CFD數值計算的可靠性,需要對計算方法進行驗證,流程見圖1。
1.1 數值計算方法
笛卡爾坐標系中不可壓縮黏性流體的控制方程包括連續性方程和動量守恒方程[1]。采用有限體積法(finite volume method,FVM)對控制方程進行空間離散求解。

(1)
(2)

引入Realizablek-ε湍流模型使控制方程封閉可解[2]。使用壁面函數法求解壁面區域湍流發展還不充分的低雷諾數Re流動區。第一層網格距無滑移壁面的量綱一的量距離y+值應處在30~500之間。
使用多相流體積分數法(volume of fluid,VOF)對自由液面處進行捕捉,體積分數Cq可由控制方程(3)求得[3]。
(3)
采用重疊網格(overset)法將計算域劃分成背景網格區域及重疊網格區域,只有重疊網格區域發生運動,大量減少了由于物體大幅運動而造成的網格加密及流域變形[4]。通過求解流體外力作用在運動剛體上的合外力及力矩(式(4)、式(5))、以及垂蕩及縱搖的運動控制方程(式(6)、式(7)),獲取剛體運動的新位置。
(4)
(5)
(6)
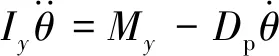
(7)

1.2 數值計算驗證算例
1.2.1 計算對象
選取Fridsma系列滑行艇之一為數值計算對象,并將計算結果與公開數據進行對比[5-7]。所選滑行艇的主尺度信息見表1,型線見圖2。
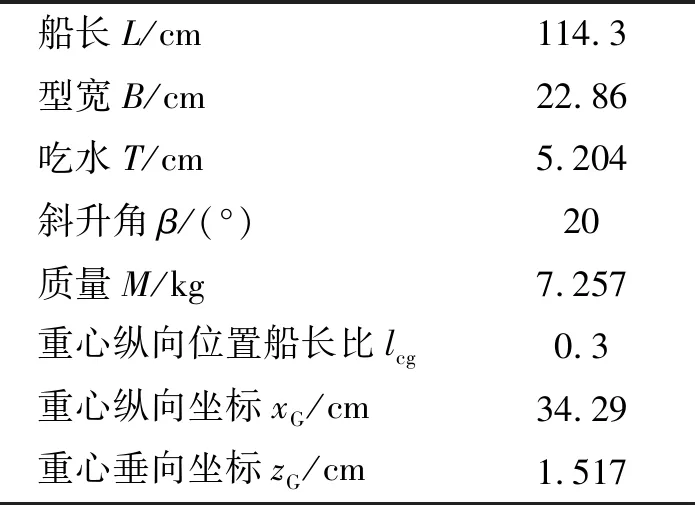
表1 Fridsma滑行艇主尺度及參數

圖2 Fridsma滑行艇型線
模型與數值計算均服從右手坐標系,坐標原點在尾垂線與自由液面的相交處。
1.2.2 計算域及邊界條件
對于在靜水中航行的船舶,其航速V與船行波波速u相等,則可根據水波理論計算其最大興波波長λW(式8)。在不考慮流體黏性以及自由液面時,可根據伯努利方程計算最大興波波高ZA(式9)。同時,可根據開爾文波半張角φ(約為19.47°)估算中縱剖面到船側池壁的距離。綜上所述,同時參考計算域的可視性,確定計算域的大小及邊界條件的設置,見圖3、4(由于滑行艇計算域尺寸較船長相比過大,為方便觀察,此處用一艘低速船來解釋計算域的設置)。
λW≈0.641V2
(8)
(9)
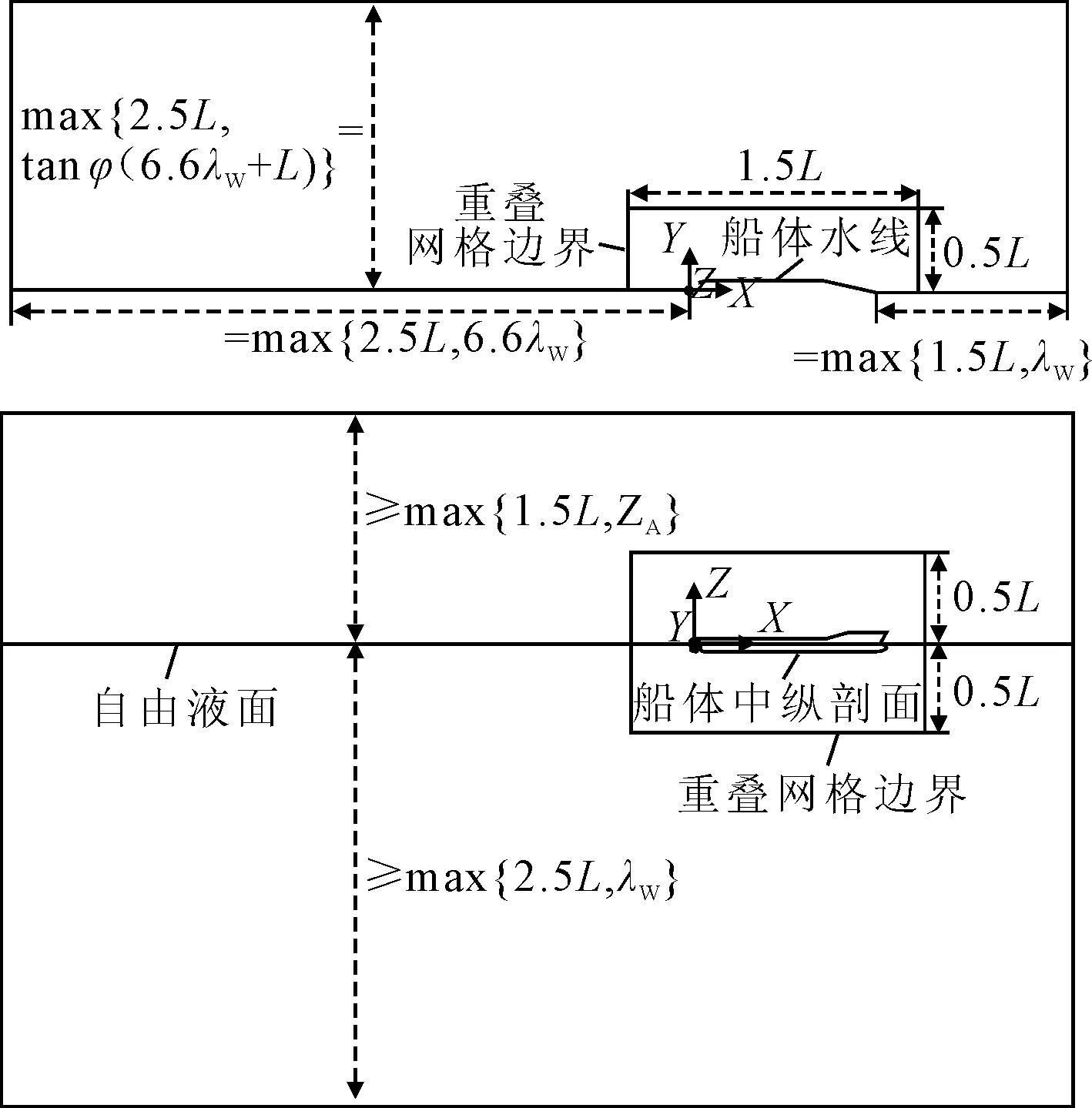
圖3 計算域的確定
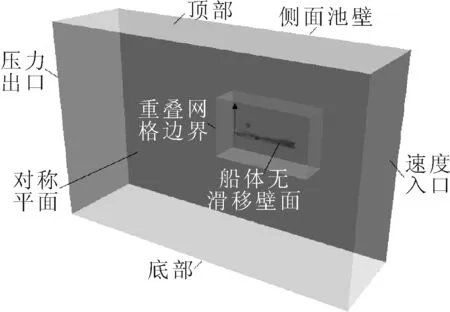
圖4 邊界條件
1.2.3 網格劃分及網格獨立性驗證
采用切割體網格法對計算域進行網格劃分,分別對自由液面、興波區域、船體周圍以及重疊網格區進行網格加密,在船體無滑移表面劃分6層邊界層,邊界層區域內網格增長率為1.5,第一層網格高度Δy根據y+經驗公式(10)計算[8]。
(10)

表2 網格信息及網格獨立性驗證計算結果
1.2.4 計算工況與驗證結果
采用Grid-M對Fridsma滑行艇在Fr分別為0.595、0.892 5、1.19的3個工況進行數值計算,總阻力、縱傾,以及濕長度長寬比的計算值與試驗值及文獻計算值的對比情況見圖5。可見采用本文提出的網格劃分方式及數值計算方法可以對滑行艇總阻力及運動情況進行估算及模擬。
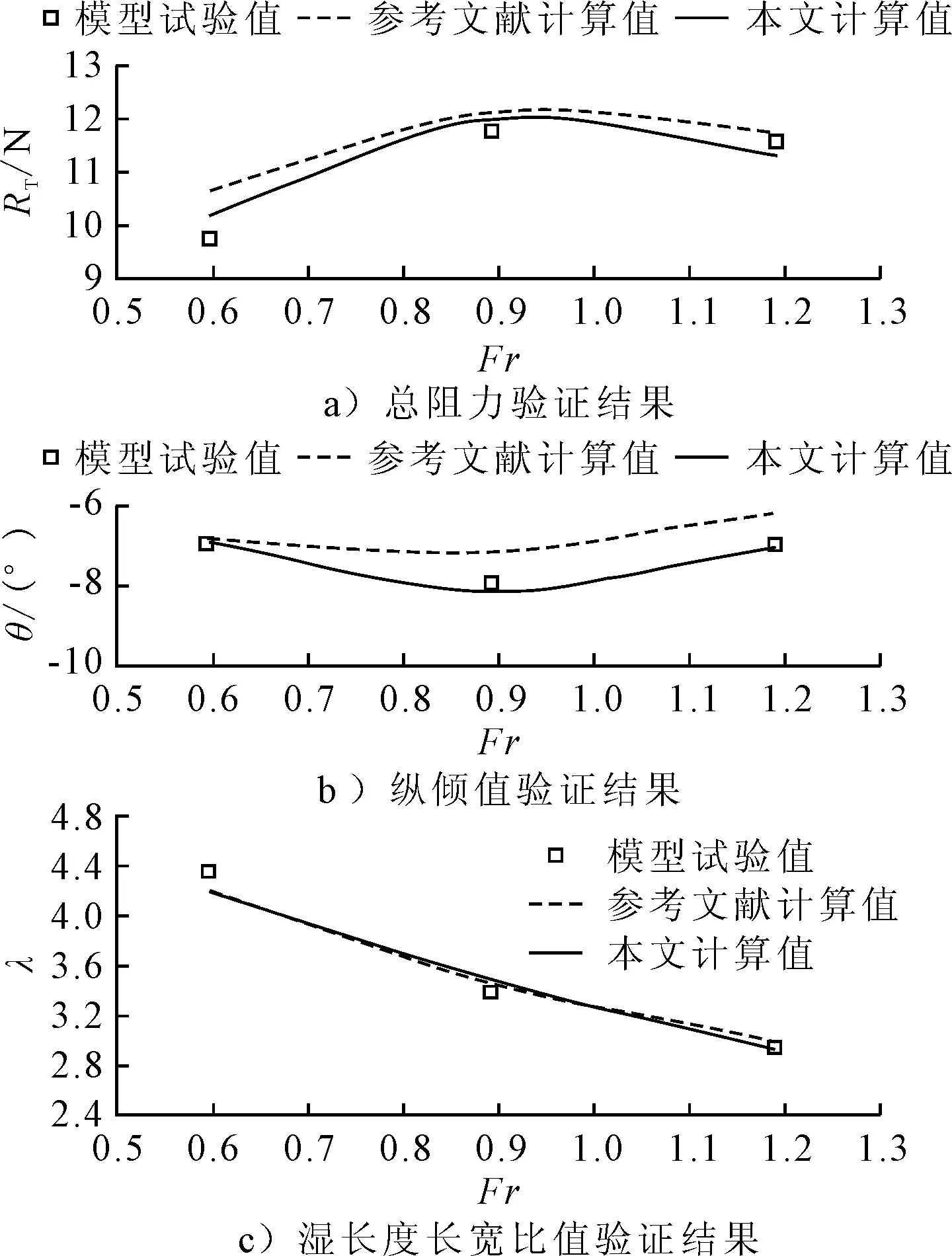
圖5 Fridsma滑行艇CFD計算驗證結果(β=20°)
2 高速滑行艇CFD計算
2.1 研究對象
選用由大連理工大學設計的高速滑行艇為研究對象,選取縮尺比α=2的模型進行計算。實船及模型主尺度信息見表3,三維模型見圖6。
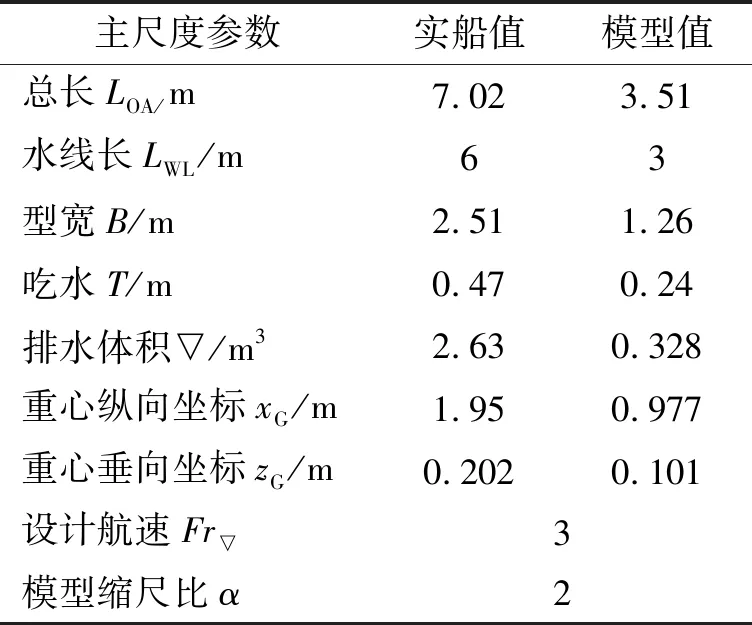
表3 高速滑行艇主尺度
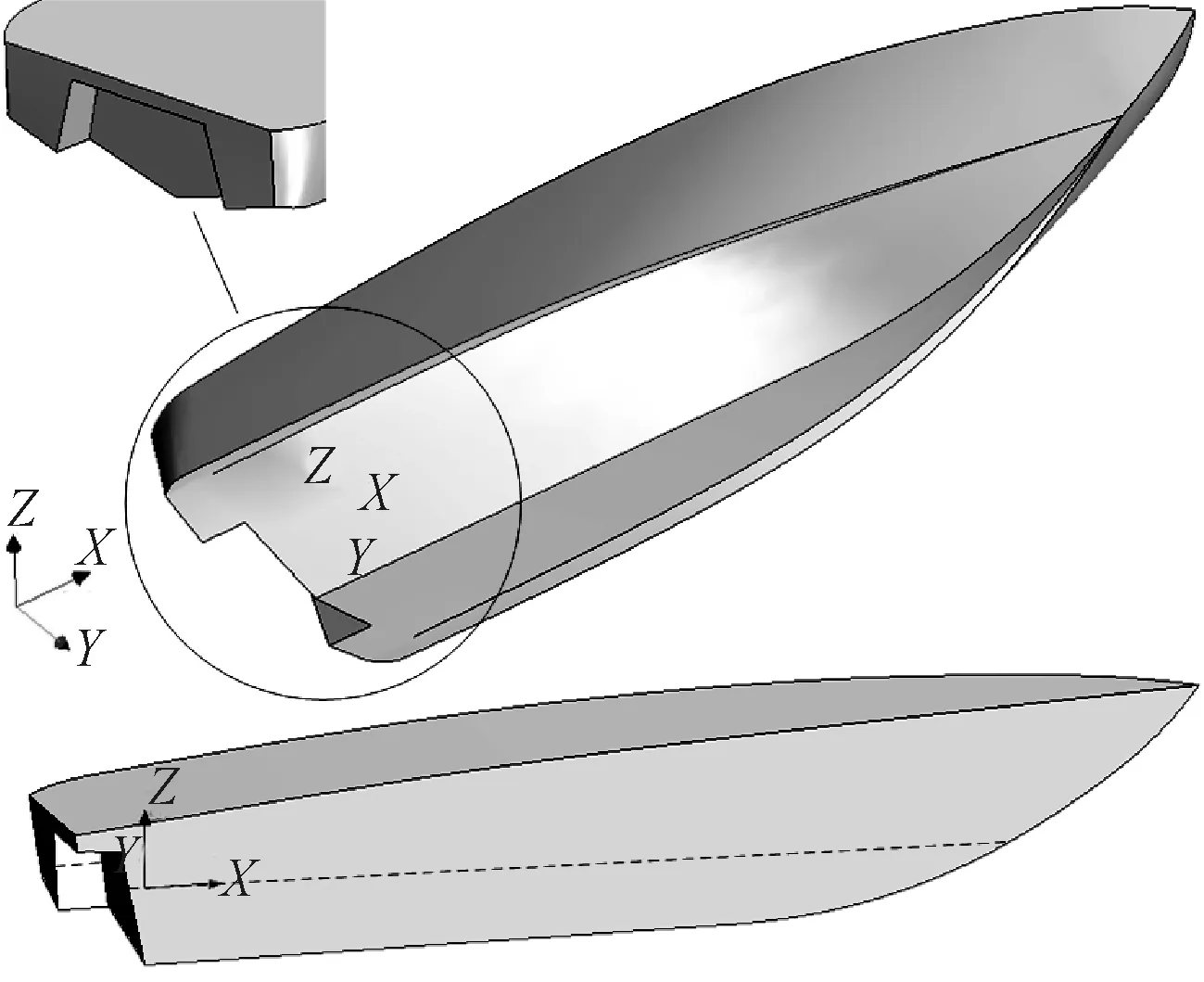
圖6 高速滑行艇三維模型
2.2 數值計算
對于相同的重心位置,航速越高越容易縱向運動失穩;對于相同航速,重心位置越靠向船尾越容易縱向運動失穩。同時重心垂向坐標變化空間較小,故選取重心縱向坐標來代表重心位置。因此選取體積弗勞德數Fr▽(式(11))及重心縱向坐標xG與計算船長L之比lcg為設計變量(其中L即為LWL)。體積弗勞德數Fr▽的取值范圍為[2.5,5.5];重心縱向位置lcg的取值范圍為[0.2,0.7]。使用最優拉丁超立方抽樣方法(optimal latin hypercube sampling method,OLHS)[9]在設計空間選取26個樣本點進行數值計算,樣本點在設計空間的分布見圖7。
(11)
式中:V為航速;g為重力加速度;▽為排水體積。
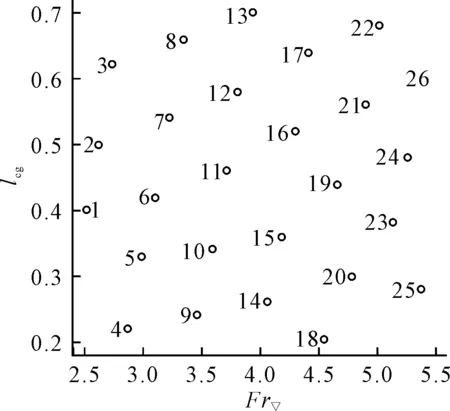
圖7 高速滑行艇CFD計算樣本點分布示意
2.3 數值計算結果
以樣本點16為例。根據經驗公式,樣本點16的第一層邊界層高度選取0.6 mm,預計y+值約為200。數值計算收斂結果見圖8。

圖8 樣本點16數值計算結果
其中Sinkage為正代表船舶沿Z軸向上運動;縱傾角為負代表艉傾。計算從物理時間4 s左右開始達到平衡穩定狀態,全船總阻力約為650 N。結合自由液面縱剖圖(圖9)及興波圖(圖10),艇身在流體動升力的作用下被抬出水面0.135 m,并艉傾2°。全船y+分布見圖11,艇底y+值約為200,符合預計值。

圖9 樣本點16的自由液面縱剖圖
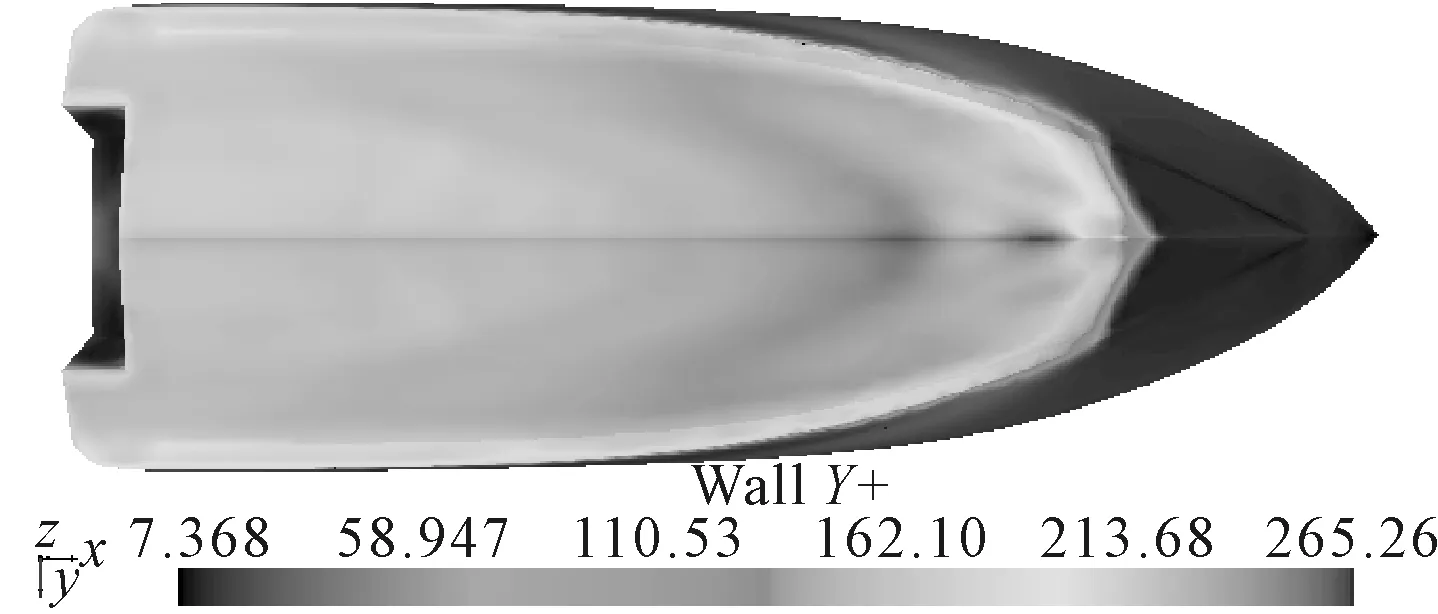
圖11 樣本點16的船底y+分布
3 高速滑行艇CFD計算結果及航態優化
3.1 樣本點CFD計算結果
采用上述方法對全部26個樣本點進行數值計算,根據對計算結果的觀察,當航速相同時,可根據lcg從大到小的變化將滑行艇的航行狀態分為4類。
I-排水艏傾航行(滑行艇艏傾,艇體下坐,阻力十分大,甲板或上浪,見圖12)。
II-排水艉傾航行(滑行艇艉傾,艇體的一部分浸沒在水中,阻力較大,見圖13a))。
III-穩定滑行(滑行艇艉傾,艇體幾乎完全被抬出水面,阻力大幅減小,見圖13b))。
IV-縱向運動失穩(滑行艇縱向運動失穩,由于重心過于靠后,經過滑行狀態后艇身飛出水面,后在重力作用下又落入水中,然后繼續往復上述運動,見圖14)。
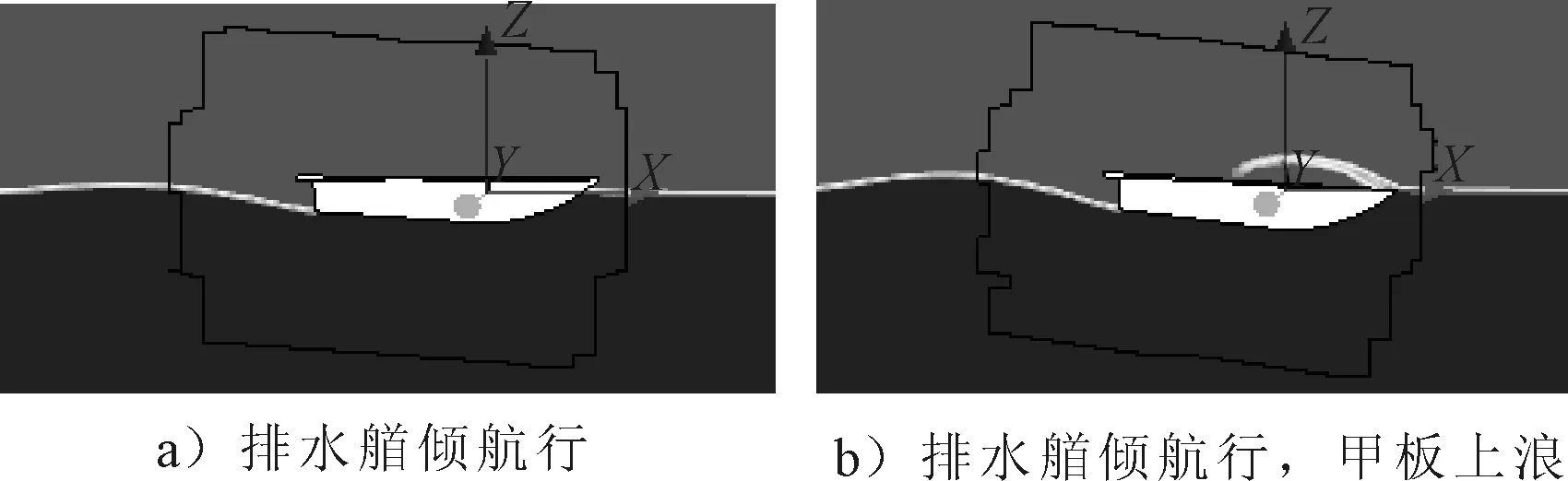
圖12 航行狀態I
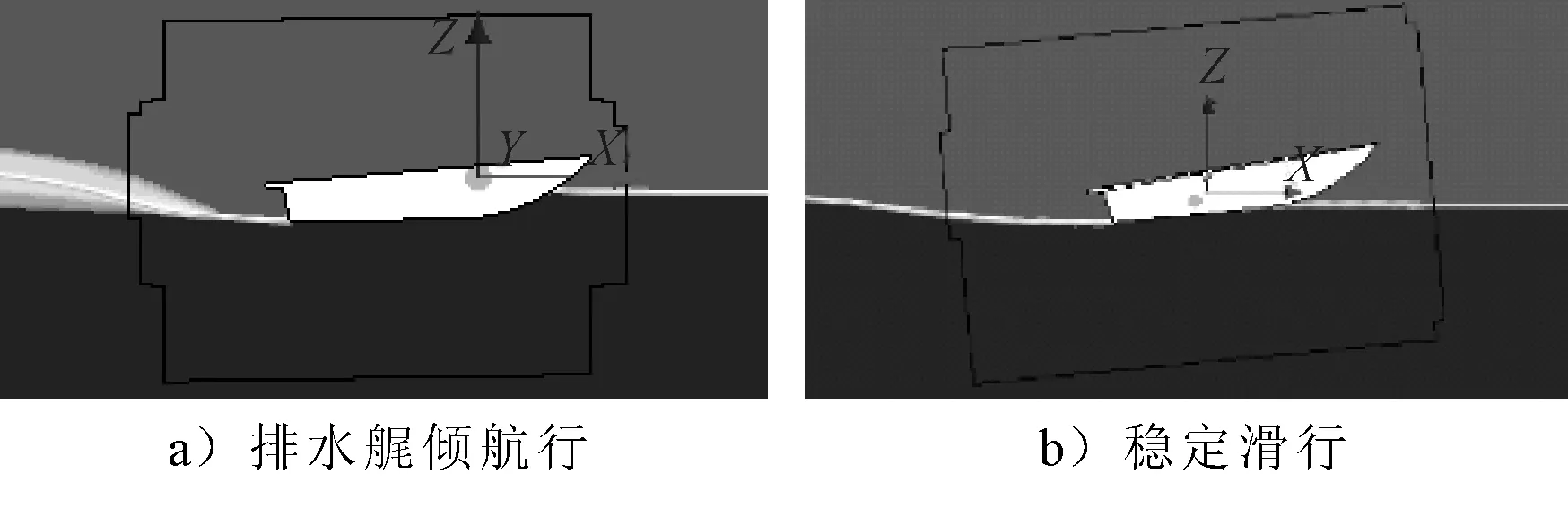
圖13 航行狀態II、III
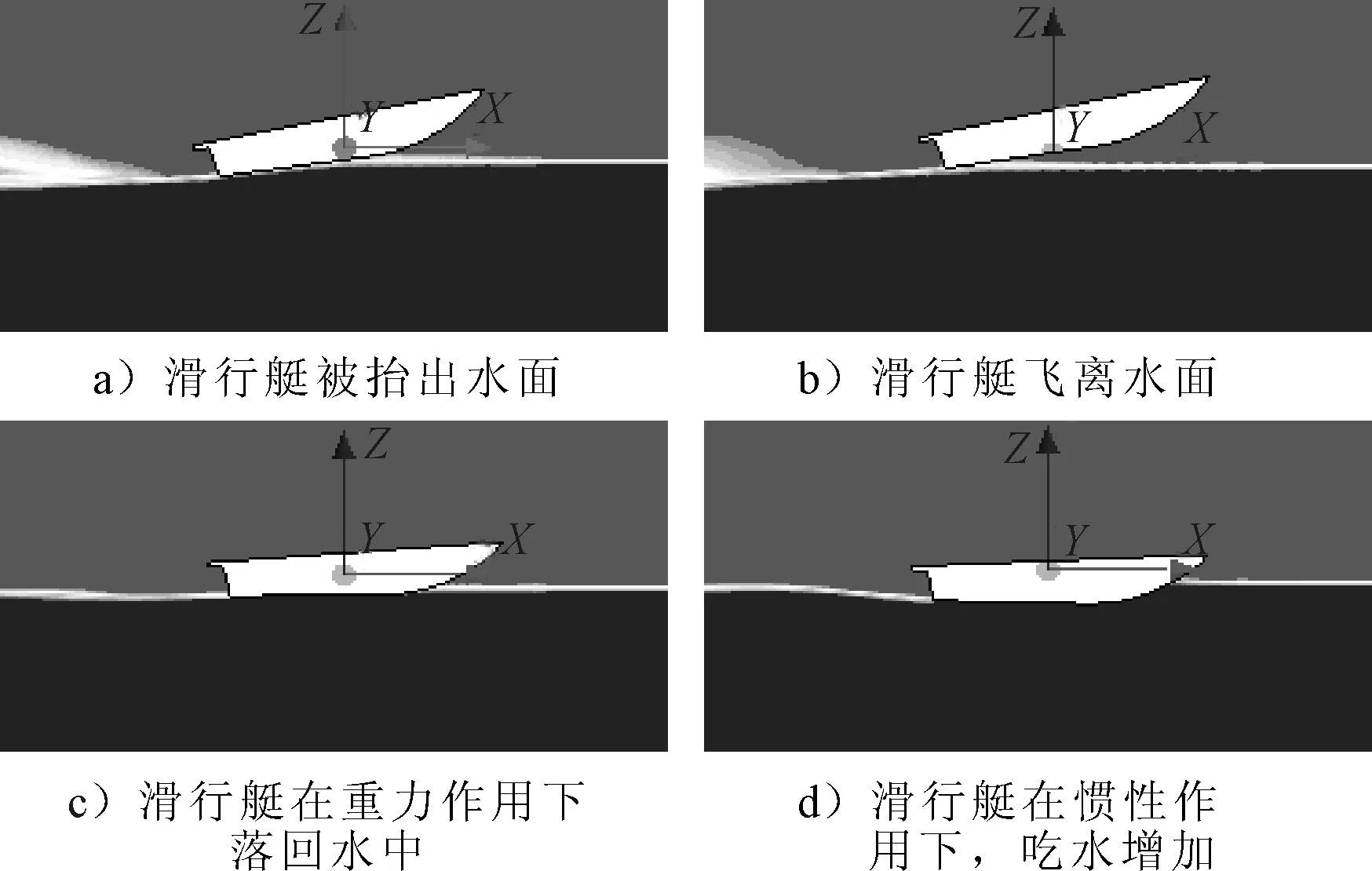
圖14 航行狀態IV
所有樣本點的航行狀態在設計空間中的分布情況見圖15,其中由于處于艏傾航態的只有樣本點3一個,為點3與周圍樣本點2、7、8之間增加加密點e1、e2與e3。
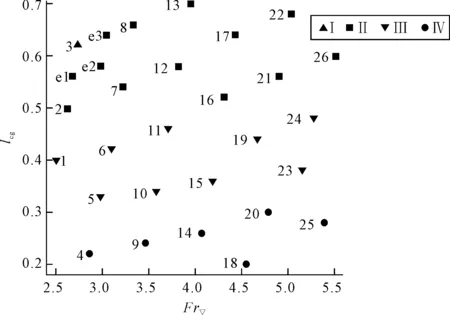
圖15 樣本點航態計算結果
3.2 基于SVM的航態分類
3.2.1 SVM分類原理
以樣本點線性可分的情況為例,SVM的分類原理即找到一個N維最優分類超平面,在能夠正確的將±1兩類數據分割到超平面兩側的同時,保證兩側到該超平面距離最近的兩類樣本點的間隔最大化。當N=2時,超平面是一條二維直線,見圖16,其中:H:ω·x+b=0為分類超平面;·為向量內積;ω為平面法向量;b為平面截距。

圖16 最優分類超平面示意
引入Lagrange參數α=[α1,α2,…,αi,…,αn],其中αi為每個樣本點對應的Lagrange算子,將求解分類間隔最大化的優化問題轉換為求解Lagrange參數向量α的優化問題(式12)。最后通過序列最小最優化算法(sequential minimal optimization,SMO)求解Lagrange參數α*。
當樣本數據線性不可分時,通過引入核函數將樣本數據轉換到高維線性空間。
3.2.2 基于偏離度約束的SVM
將一個樣本點距離最優分類超平面的遠近稱為偏離度。在實際計算中,即便是同一類型的數據,其偏離度也有所不同。例如,同為III型運動的樣本點5與樣本點23相比,更難以收斂,其運動狀態更接近IV型運動,偏離度更小。然而受樣本點分布的影響,在不考慮數據的偏離度時,容易出現原本應該離最優分類超平面更近的樣本點反而離得更遠的情況發生,為消除這種影響,在此提出基于“偏離度約束”的SVM(SVM based on deviation constraint,DC-SVM),引入“偏離度打分”及“距離約束”。

(13)

αi≥0,i=1,2,…,n+l+m-2
(14)
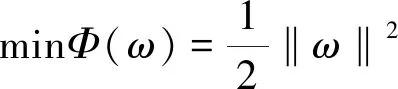
3.2.3 航態優化設計曲線
為指導高速滑行艇航行姿態的調整,以達到減阻提速的目的,III型與IV型航態之間的分類邊界曲線C至關重要。圖17中曲線A、B與C為按照基本SVM算法及二次多項式核函數擬合時的分類結果,圓圈標記的樣本點為支持向量。然而分類邊界曲線C的支持向量為樣本點23,并不符合實際計算情況。在此使用基于偏離度約束的SVM算法,將III型運動樣本點的距離約束添加到計算中,求得修改后的分類邊界曲線C,此時樣本點5為支持向量,各個樣本點到分類邊界的距離也符合偏離度排序。
圖17 樣本點分類結果
由于無法直接判定處在分類邊界上的設計點(Fr▽,lcg)的航態屬性,需要將修改后的分類邊界線曲線C向III型航態區域“推進”一定的距離,以得到相對優化的航態設計曲線。“推進”方法見圖18,點P0為分界線的支持向量,點M為點P0在分界線上投影,設冗余量為c∈[0,1],則將分界線沿向量MP0方向移動c|MP0|后,可得到帶冗余度的優化航態設計曲線。當c=1時,優化分界線通過支持向量點P0,為一條保守的航態設計線;根據經驗選取冗余量c=10%時,得到的帶冗余的航態優化設計線。
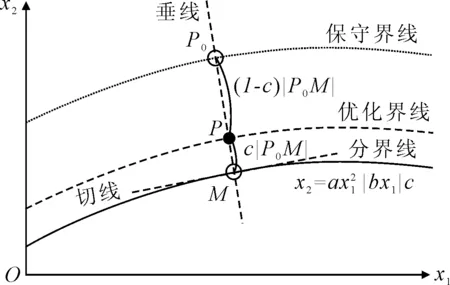
圖18 分類邊界、保守邊界及優化邊界
最終的擬合結果為式(15)~(19)。
1)分類曲線A。
(15)
2)分類曲線B。
406.83)×10-3
(16)
3)分類曲線C。
185.5)×10-3
(17)
4)基于偏離度約束的SVM求得分類曲線C。
5)帶10%冗余的優化結果。
式中:x1代表Fr▽,x2代表lcg。
3.2.4 優化曲線驗證
初始設計方案為Fr▽=3、lcg=0.384。由航態優化曲線(5)可知,當Fr▽=3時,優化后的重心分布lcg=0.326;當重心分布取lcg=0.384時,優化后的航速Fr▽=7.16。對初始設計點及兩個優化設計點進行CFD計算,以驗證航態優化曲線在減阻提速上的成果,見表4。
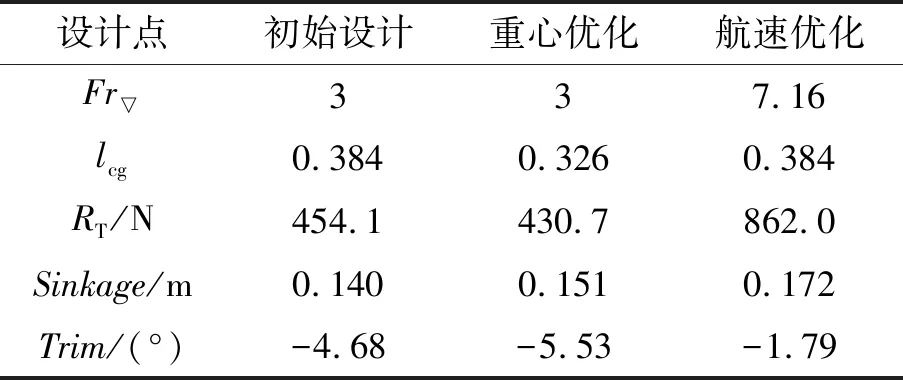
表4 優化結果驗證
當優化設計點與原設計方案航速相同時,按照航態優化曲線的計算,將重心沿X軸向后移動5.88%,獲得5.15%的減阻效果;當優化設計點與原設計方案重心位置相同時,設計航速可以大幅提升至Fr▽=7.16。
4 結論
使用具有公開試驗數據的Fridsma滑行艇,驗證在CFD計算中采用重疊網格法對船舶自由升沉及縱傾有較好的模擬;以體積弗勞德數Fr▽及重心縱向坐標船長比lcg為設計變量,研究高速滑行艇的縱向運動穩定性,計算結果可以較好地模擬滑行艇的4種航行姿態;采用SVM法,擬合不同航態之間的分類邊界,并提出基于“偏離度約束”的SVM方法(DC-SVM),使分類邊界的計算不受樣本點分布的影響,更貼近工程實際;與初始設計相比,重心優化點得到5.15%阻力降低;航速優化點的體積弗勞德數Fr▽從3提升至7.16;后續工作可以使用樣本點數據,搭建近似模型,實現對高速滑行艇的阻力及縱傾角的預報。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
海峽姐妹(2017年7期)2017-07-31 19:08:17