基于位置檢測的橋式起重機模糊滑模糾偏控制
2019-09-10 07:22:44毛景魁倪艷榮陳智娟
河南科技
2019年34期
毛景魁 倪艷榮 陳智娟

摘 要:起重機在實際運行過程中會出現跑偏和“啃軌”的現象,從而影響起重機的使用和壽命。針對此現象,采用傳感器檢測車輪的位置信息,使用模糊控制和滑模控制相結合的控制策略,有效提升起重機的性能,提高實際生產效率,延長起重機壽命。
關鍵詞:橋式起重機;位置檢測;模糊滑模控制
中圖分類號:TH215;TP273 文獻標識碼:A 文章編號:1003-5168(2019)34-0063-03
Deviation Correction of Bridge Crane Based on Position
Detection with Fuzzy Sliding Mode Control
MAO Jingkui NI Yanrong CHEN Zhijuan
(Henan Institute of Technology,Xinxiang Henan 453003)
Abstract: In the actual operation of the crane, there will be deviation and "rail gnawing", which will affect the service life of the crane. In view of this phenomenon, the sensor was used to detect the wheel position information, and the control strategy of fuzzy and sliding mode control was used to effectively improve the performance of the crane, improve the actual production efficiency, and extend the life of the crane.
Keywords: bridge crane;position detection;fuzzy sliding mode control
1 研究背景
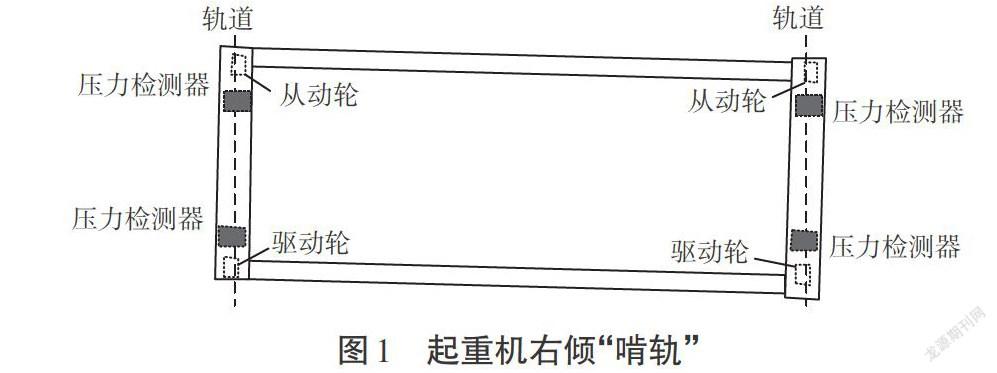
在工業生產現場,橋式起重機的運行環境較惡劣,工作任務較繁重,而各結構件的穩定性和可靠性較差[1]。同時,橋式起重機具有跨度大、水平剛度低、零件多、安裝過程復雜的特點,而且傳動機構的安裝精度難以得到有效保證,特別是在使用過程中運行頻繁的起重機,其傳動機構的積累誤差更大,再加上實際工作時會遇到各種復雜情況,橋式起重機在運行時難免會有不同程度的跑偏或“啃軌”現象,橋式起重機的車輪輪緣和軌道會產生接觸,相互擠壓摩擦,從而降低實際的作業效率,甚至發生安全事故[2-4]。在橋式起重機運行過程中,實施實時糾偏控制,可提高系統穩定性,保障人員和設備安全,降低維修費用,提高實際生產效率[5]。
近年來,起重機運行過程中的“啃軌”問題引起了相關領域的高度重視,由此,出現了大量研究成果。傳統的糾偏控制方法主要為提高鋼架強度,提高安裝精度,如加裝水平輪,輪緣與軌道之間的滑動摩擦被水平輪的滾動摩擦取代,在相同側向力的情況下,運行機構的摩擦阻力大大降低。……
登錄APP查看全文
