基于OpenMV的視覺識別系統在六足機器人中的應用
2019-09-10 07:22:44儲澤楠王偉蔡勝宇
河南科技
2019年34期
儲澤楠 王偉 蔡勝宇

摘 要:為解決六足機器人自主識別的問題,實現機器人智能化、人性化的發展,以OpenMV為主要平臺,以六足機器人為主要機器載體,同時以Python為主要開發語言,以C語言為輔助開發語言,加上對圖像處理技術的合理應用,設計了一個簡易的基于OpenMV的視覺識別系統,從而實現視覺識別的應用。
關鍵詞:六足機器人;OpenMV;視覺識別;模擬仿真
中圖分類號:TP301 文獻標識碼:A 文章編號:1003-5168(2019)34-0026-04
Application of Vision Recognition System Based on
OpenMV in Hexapod Robot
CHU Zenan WANG Wei CAI Shengyu
(Anyang Institute of Technology,Anyang Henan 455000)
Abstract: In order to solve the problem of autonomous recognition of hexapod robot and realize the development of intelligent and humanized robot, a simple visual recognition system based on openmv was designed with openmv as the main platform, hexapod robot as the main machine carrier, python as the main development language, C as the auxiliary development language, and the reasonable application of image processing technology realize the application of visual recognition.
Keywords: hexapod robot;OpenMV;visual recognition;simulation
隨著機器人的熱起,相關技術也不斷發展,其中視覺信息處理技術是移動機器人研究的關鍵技術之一。目前,視覺信息處理的內容主要包括視覺信息的壓縮和濾波、道路檢測和障礙物檢測、特定交通道路標志的識別、三維信息感知與處理[1-4]。視覺信息的獲取是機器人規劃和導航的基礎,同時也是決定機器人正確識別當前道路環境信息的依據。獲取到有效的視覺信息可以正確規劃路線并為正常的行走打下基礎[5]。視覺信息的過濾是基礎的視覺處理過程,能為其他視覺功能提供基礎的信息反饋,從而實現相應功能[6]。
因此,把視覺識別系統放到六足機器人進行研究,對實現機器人的智能化、人性化提供了新的思路。加強視覺識別系統的應用,可以在環境因素多變的情況下使機器人做出自主決策,讓機器人更好地服務于社會、服務于人類,促進時代的發展,推動科技的進步。
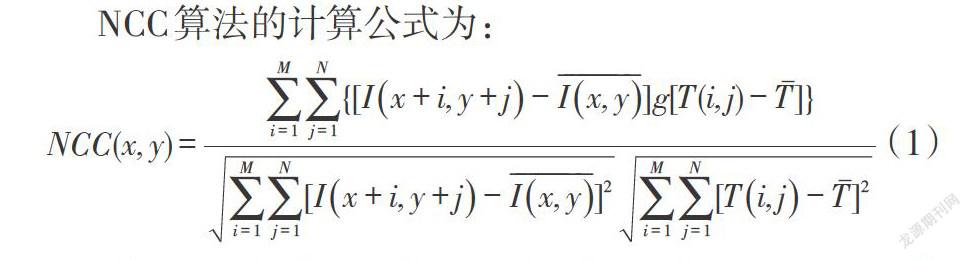
1 視覺識別基本理論
簡單來說,視覺識別就是對攝像頭獲取到的圖像進行處理和分析。……
登錄APP查看全文
