視覺預(yù)瞄反饋的小車軌跡跟蹤算法設(shè)計(jì)
2019-09-10 07:22:44何岳華
信息技術(shù)時(shí)代·上旬刊 2019年2期
何岳華

摘要:自動(dòng)導(dǎo)航小車(Automatie Guided Vehiele)是一種無人操縱的自動(dòng)化運(yùn)輸設(shè)備,能夠承載一定的重量在始發(fā)地與目的地之間自主駕駛,自動(dòng)運(yùn)行。因而,如何設(shè)計(jì)出一種跟蹤誤差小、動(dòng)態(tài)響應(yīng)快、能適應(yīng)多種復(fù)雜環(huán)境控制系統(tǒng)是十分重要的。本文在分析AGV的結(jié)構(gòu)特點(diǎn)及其與軌跡的相對(duì)運(yùn)動(dòng)關(guān)系基礎(chǔ)上,建立了其運(yùn)動(dòng)學(xué)模型。利用經(jīng)典控制理論中的工程設(shè)計(jì)方法,在控制系統(tǒng)的前向通道中串聯(lián)一個(gè)PID控制器,并合理的設(shè)計(jì)了控制器的參數(shù)。通過詳細(xì)的仿真分析表明PID控制器即使在較大偏差時(shí)也可以使系統(tǒng)快速糾正偏差,能夠滿足AGV軌跡跟蹤控制的要求。
關(guān)鍵詞:自動(dòng)導(dǎo)航小車;軌跡跟蹤;PID控制器
Abstact:Automatic Guided Vehicle (AGV)is an automatic transportation vehicle without drive,and with a certain amount of weight it can travel between the departure and the destination.Tracking control is the key technique among the researches of the AGV and it is very important to design a control system which has the following characteristics:small tracking error,quick dynamic response,adaptability to complicated circumstances and so on.AGV kinematics model is founded based on AGV’s structure features and relative motion relations with lane.With the theory of engineering design method,a PID-Controller is designed in the First-channel of the control system,and the optimal parameters are obtained.Simulation results show that the PID controller can make system converging quickly in big deviation conditions and meet all demands of the AVG’s tracking following.
Key Words:AGV,Tracking Following,PID Controller
1 引言
自動(dòng)導(dǎo)航小車(AGV,Automatic Guided Vehicle),是一種以電池為動(dòng)力,裝有非接觸導(dǎo)向裝置的無人駕駛自動(dòng)化搬運(yùn)車輛[1]。它的主要特征表現(xiàn)為具有小車編程及系統(tǒng)控制管理功能,并能在計(jì)算機(jī)的監(jiān)控下,按指令自主駕駛,自動(dòng)沿著規(guī)定的軌跡行駛,到達(dá)指定地點(diǎn),并完成一系列作業(yè)任務(wù)。
自動(dòng)導(dǎo)航小車的應(yīng)用可以極大地提高企業(yè)生產(chǎn)自動(dòng)化程度和生產(chǎn)效率。它最早是在北歐發(fā)展起來的,在國外的發(fā)展應(yīng)用已經(jīng)有幾十年的歷史了,由于它具有機(jī)能集中、系統(tǒng)簡單、施工和系統(tǒng)構(gòu)成容易等優(yōu)點(diǎn)[2]。因此,除了在柔性制造系統(tǒng)(FMS)和自動(dòng)化工廠中用來組成高效、快捷的物流系統(tǒng)外,自動(dòng)導(dǎo)航小車還廣泛地應(yīng)用在機(jī)械加工、汽車制造、港口貨運(yùn)、造紙、等諸多行業(yè),尤其適用于人員不宜進(jìn)入的工作場所。
2 自動(dòng)導(dǎo)航小車運(yùn)動(dòng)學(xué)模型
自動(dòng)導(dǎo)航小車運(yùn)動(dòng)學(xué)模型可以用圖1抽象表示[3]。在圖1中,點(diǎn)Or為參考點(diǎn),其坐標(biāo)為(xref,yref),點(diǎn)O為兩驅(qū)動(dòng)輪的輪軸中心,其坐標(biāo)為(x,y),α為小車導(dǎo)向輪轉(zhuǎn)角,β為車身與X軸的夾角,L為小車前后輪的軸間距,R為Or 與小車后輪的軸間距。如果將參考點(diǎn)選為O,則R=0,xref=x,yref=x。假設(shè)后軸中心點(diǎn)O速度為v,
則 。因此,可以得到小車運(yùn)動(dòng)學(xué)方程如式1。
根據(jù)自主導(dǎo)航車運(yùn)動(dòng)學(xué)模型,將小車的速度和導(dǎo)向輪轉(zhuǎn)角,即 作為輸入控制量,以實(shí)現(xiàn)機(jī)器人的位姿控制。小車的運(yùn)動(dòng)學(xué)模型的建立,方便了仿真分析,可以更好的指導(dǎo)控制系統(tǒng)的設(shè)計(jì)。
3 數(shù)字PID控制策略
3.1 數(shù)字PID算法的簡介
在連續(xù)-時(shí)間控制系統(tǒng)中,PID控制器應(yīng)用得非常廣泛。數(shù)字PID控制比連續(xù)PID控制更為優(yōu)越,因?yàn)橛?jì)算機(jī)程序的靈活性,很容易克服連續(xù)PID控制中存在的問題,數(shù)字PID的可以分為位置式PID、增量式PID和速度式PID,本文中利用的是位置式PID算法。離散位置PID算法數(shù)學(xué)表達(dá)式如下:
其中E為誤差,TI為積分常數(shù),TD為微分常數(shù),T為采樣周期,P為PID控制器輸出。
3.2 預(yù)瞄PID控制器的輸入與輸出
小車在運(yùn)動(dòng)過程中首先通過攝像頭拍到前方道路信息,然后經(jīng)過圖像處理之后得到軌跡的引導(dǎo)線,接下來確定預(yù)瞄點(diǎn)。預(yù)瞄點(diǎn)的選取與控制算法中的參數(shù)預(yù)瞄距離設(shè)置有關(guān),預(yù)瞄距離越大,小車對(duì)前方的道路的走向判斷越早,從而可以提前做出轉(zhuǎn)向判斷[4]。
如圖2所示,O點(diǎn)為小車的幾何中心,XOY為以O(shè)為原點(diǎn)的相對(duì)坐標(biāo)系,P為小車當(dāng)前的預(yù)瞄點(diǎn),e則是預(yù)瞄點(diǎn)P與小車中心點(diǎn)O的橫向偏差,θ則是引導(dǎo)線預(yù)瞄點(diǎn)處切線與Y軸的夾角—方位偏差。由于視野的限制,橫向偏差的變化范圍為[-20cm,20cm],方位偏差θ的變化范圍為[-60o,60o],作為PID控制器的輸入。
由第2節(jié)小車運(yùn)動(dòng)學(xué)模型可知,小車的位置和姿態(tài)由且僅有小車行駛速率v和前輪轉(zhuǎn)角α決定。為了進(jìn)一步簡化模型,假設(shè)小車運(yùn)動(dòng)速率v為一常數(shù),于是小車的運(yùn)動(dòng)軌跡只與導(dǎo)向輪轉(zhuǎn)角α相關(guān)。因此,選取導(dǎo)向輪轉(zhuǎn)角作為預(yù)瞄PID控制器的輸出變量。由于小車轉(zhuǎn)向輪物理結(jié)構(gòu)的限制,轉(zhuǎn)向輪轉(zhuǎn)角的變化范圍為[-45o,45o]。
3.3 預(yù)瞄PID控制器的設(shè)計(jì)
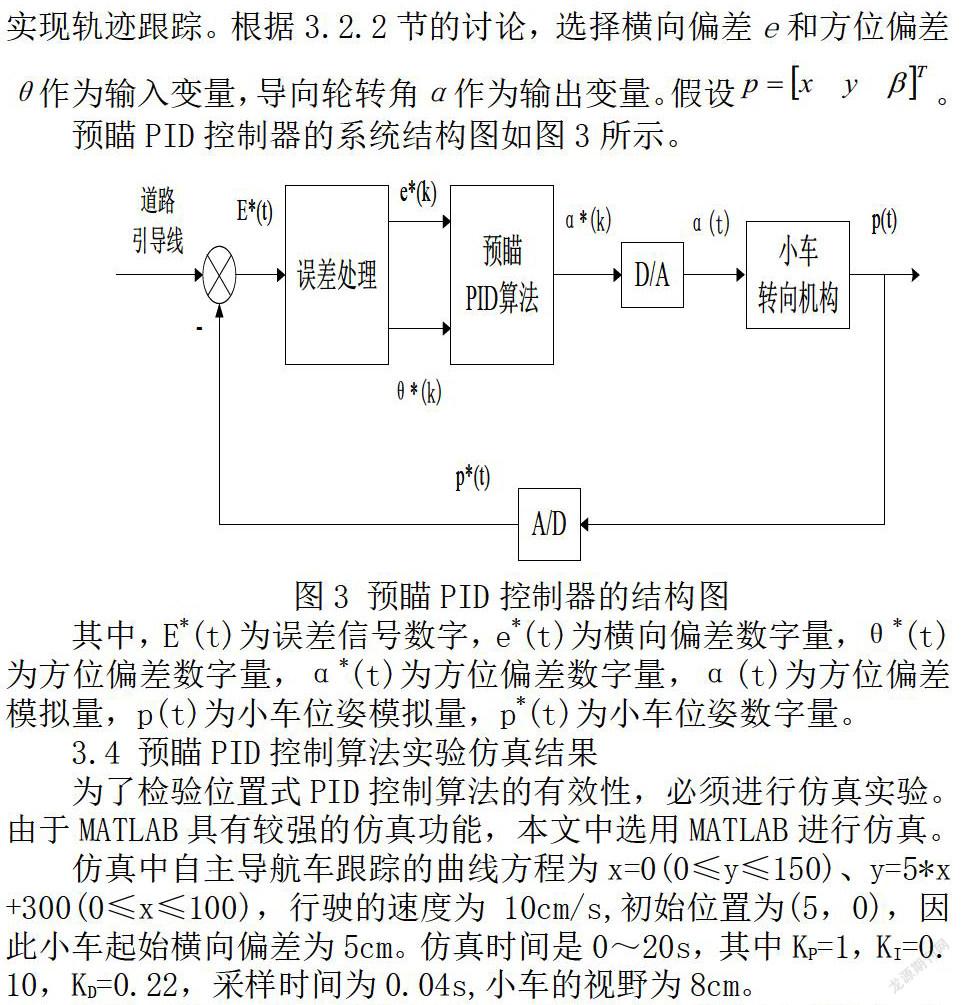
根據(jù)自主導(dǎo)航小車的運(yùn)動(dòng)特點(diǎn),本文選擇位置型數(shù)字PID算法實(shí)現(xiàn)軌跡跟蹤。根據(jù)3.2.2節(jié)的討論,選擇橫向偏差e和方位偏差θ作為輸入變量,導(dǎo)向輪轉(zhuǎn)角α作為輸出變量。假設(shè) 。
預(yù)瞄PID控制器的系統(tǒng)結(jié)構(gòu)圖如圖3所示。
其中,E*(t)為誤差信號(hào)數(shù)字,e*(t)為橫向偏差數(shù)字量,θ*(t)為方位偏差數(shù)字量,α*(t)為方位偏差數(shù)字量,α(t)為方位偏差模擬量,p(t)為小車位姿模擬量,p*(t)為小車位姿數(shù)字量。
3.4 預(yù)瞄PID控制算法實(shí)驗(yàn)仿真結(jié)果
為了檢驗(yàn)位置式PID控制算法的有效性,必須進(jìn)行仿真實(shí)驗(yàn)。由于MATLAB具有較強(qiáng)的仿真功能,本文中選用MATLAB進(jìn)行仿真。
仿真中自主導(dǎo)航車跟蹤的曲線方程為x=0(0≤y≤150)、y=5*x+300(0≤x≤100),行駛的速度為10cm/s,初始位置為(5,0),因此小車起始橫向偏差為5cm。仿真時(shí)間是0~20s,其中KP=1,KI=0.10,KD=0.22,采樣時(shí)間為0.04s,小車的視野為8cm。
如圖4所示,圖中描繪出了自主導(dǎo)航車的軌跡與運(yùn)動(dòng)軌跡。小車從起始點(diǎn)(5cm,0)開始,通過預(yù)瞄PID控制器輸出合適的小車導(dǎo)向輪轉(zhuǎn)角最終進(jìn)入預(yù)定的軌跡。從圖中可以看出,跟蹤效果滿足了控制要求。如圖5所示,圖中描繪出了自主導(dǎo)航車在運(yùn)動(dòng)過程中橫向偏差e隨時(shí)間變化的曲線。從圖中可以得知,在拐彎之前,小車的超調(diào)量基本上小于5cm,在拐彎時(shí)小車能迅速調(diào)整運(yùn)動(dòng)姿態(tài),超調(diào)量小于1cm,之后迅速減小至0cm。兩次振蕩過程中分別經(jīng)過2s、1s后小車的橫向偏差基本上等于0cm,跟蹤效果比較好。
4 結(jié)語
本文首先建立了小車運(yùn)動(dòng)學(xué)模型。在分析了小車的運(yùn)動(dòng)特點(diǎn)之后,本文選擇了位置式數(shù)字PID算法。然后設(shè)計(jì)了預(yù)瞄PID控制器并確定了控制器的輸入與輸出及其結(jié)構(gòu)。對(duì)預(yù)瞄PID控制算法進(jìn)行了仿真,實(shí)驗(yàn)結(jié)果表明,該算法控制響應(yīng)快,精度高,能夠較好的滿足AGV軌跡跟蹤控制的要求。
參考文獻(xiàn)
[1]關(guān)宏,張智勇.AGV整體集成系統(tǒng)結(jié)構(gòu)設(shè)計(jì)[J].物流技術(shù),2016,22(4):37~38.
[2]胡躍明,邱致和.國外物流發(fā)展?fàn)顩r及趨勢(shì)[J].中國交通運(yùn)輸協(xié)會(huì),2017,9(4):10~12.
[3]趙毅紅,朱劍英.基于綜合導(dǎo)向的車式移動(dòng)機(jī)器人軌跡跟蹤控制.華南理工大學(xué)學(xué)報(bào),2015,34(11):60~63
[4]呂云光,黃強(qiáng),歐陽普仁,等.FFS500-2FMS中自動(dòng)引導(dǎo)小車控制系統(tǒng).南京理工大學(xué)學(xué)報(bào),2015,24(1):61~63.