單頻網(wǎng)外輻射源雷達(dá)定位算法分析
2019-09-09 03:41:22
雷達(dá)科學(xué)與技術(shù) 2019年4期
關(guān)鍵詞:關(guān)聯(lián)測量
(中國電子科學(xué)研究院,北京 100041)
0 引 言
外輻射源雷達(dá)是一種雙/多站構(gòu)型的雷達(dá)系統(tǒng),本身并不發(fā)射電磁波,通過被動接收第三方發(fā)射的電磁信號,對目標(biāo)進(jìn)行定位、跟蹤。相對于傳統(tǒng)雷達(dá),外輻射源雷達(dá)具有優(yōu)良的“四抗”性能[1-3]。
然而傳統(tǒng)外輻射源信號采用多頻網(wǎng)模式(各輻射站頻率不同),頻率利用率低、功耗大,容易對其他網(wǎng)絡(luò)產(chǎn)生干擾并且覆蓋盲區(qū)大。而隨著數(shù)字信號和正交頻分復(fù)用技術(shù)的發(fā)展,單頻網(wǎng)模式應(yīng)運而生。單頻網(wǎng)由多個處于同步狀態(tài)的無線電發(fā)射塔組成,這些發(fā)射塔采用相同的頻率,在同一時刻發(fā)射相同的電磁波,以完成對特定服務(wù)區(qū)的可靠覆蓋[4]。
單頻網(wǎng)外輻射源雷達(dá)是指輻射源采用單頻網(wǎng)輻射源的外輻射源雷達(dá),屬于多基地雷達(dá)(多發(fā)射單/多接收雷達(dá))的一種。其不僅兼有單頻網(wǎng)和傳統(tǒng)外輻射源雷達(dá)的優(yōu)勢,而且相比于多頻網(wǎng)外輻射源雷達(dá)具有以下優(yōu)點[5]:1)系統(tǒng)多采用多發(fā)單收模式并且各回波信號同時處理,相對于多頻網(wǎng)采用多發(fā)單收(分時處理)或單發(fā)多收的模式具有系統(tǒng)性能高、硬件成本低的優(yōu)點;2)只有一個發(fā)射站,設(shè)備集中,系統(tǒng)維護(hù)簡單便捷;3)接收的數(shù)據(jù)集中于一個節(jié)點,處理集中,軟件成本低;4)各節(jié)點之間通信少,安全性更高(抗反輻射導(dǎo)彈能力強),而多頻網(wǎng)數(shù)據(jù)分散于各個節(jié)點,聯(lián)合處理各節(jié)點之間需要頻繁通信,安全性能低。近年來,數(shù)字廣播電視信號逐步取代模擬信號,單頻網(wǎng)技術(shù)因具有頻率節(jié)約、頻譜利用率高等諸多優(yōu)勢,更是得到廣泛應(yīng)用。基于單頻網(wǎng)數(shù)字廣播電視信號的外輻射源探測也相應(yīng)成為近年來的研究熱點。
然而,由于單頻網(wǎng)中所有發(fā)射站發(fā)射信號完全相同,在接收端能夠接收到所有發(fā)射站信號的回波,但是無法對每個發(fā)射站的回波進(jìn)行區(qū)分,從而導(dǎo)致測量-發(fā)射站模糊[6-9]。即恒虛警檢測后能夠獲得距離-多普勒點跡,但是這些點跡來自哪一個發(fā)射站是未知的。如果不解決該模糊問題,直接進(jìn)行目標(biāo)關(guān)聯(lián)會出現(xiàn)海量虛警,后續(xù)的目標(biāo)跟蹤無法實現(xiàn)。本文首先對測量-發(fā)射站關(guān)聯(lián)問題進(jìn)行了建模,然后從目標(biāo)定位算法選擇的角度出發(fā),分析了不同定位方法的定位精度以及對測量-發(fā)射站關(guān)聯(lián)問題的影響,并通過三發(fā)單收的外輻射源定位模型進(jìn)行了仿真分析。
1 測量-發(fā)射站關(guān)聯(lián)
測量-發(fā)射站的關(guān)聯(lián)是單頻網(wǎng)外輻射源雷達(dá)的一個關(guān)鍵問題,主要是由同頻發(fā)射站對同一目標(biāo)的照射引起的,如圖1所示。
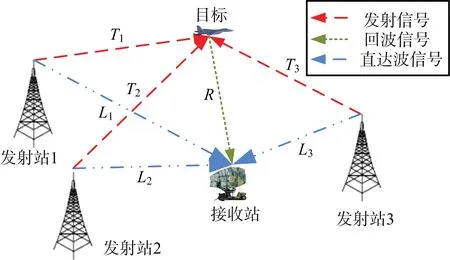
圖1 單頻網(wǎng)外輻射源雷達(dá)探測系統(tǒng)
假設(shè)發(fā)射站位置為TXs,接收站位置為RX,目標(biāo)位置xt,目標(biāo)速度為vt,則目標(biāo)的距離和多普勒頻率為
(1)
考慮噪聲的影響,假設(shè)噪聲是高斯加性白噪聲nr~N(0,σr),nf~N(0,σf),則
(2)
式中,c表示電磁波在空氣中的傳播速度。如果目標(biāo)狀態(tài)已知,則測量的條件概率可表示為
(3)

(4)
在實際場景中,并不是所有的發(fā)射站都能夠探測到目標(biāo),則S維測量的似然概率可表示為
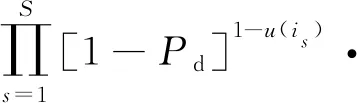
[Pdp(ωs,is|xt)]u(is)
(5)
式中,u(is)是一個指示函數(shù),表征第is個測量是否屬于目標(biāo),其定義如下:
(6)
當(dāng)所有測量均為虛警時,似然概率可表示為

(7)
式中,Ψs表示第s個發(fā)射站觀測區(qū)域的體積。這樣,S維測量-發(fā)射站關(guān)聯(lián)的代價函數(shù)可表示為

(8)
但是,目標(biāo)xt的狀態(tài)是未知的,其可以用下式的似然估計代替:

(9)
假設(shè)一個測量最多與一個目標(biāo)關(guān)聯(lián),一個測量最多與一個發(fā)射站關(guān)聯(lián),同一個目標(biāo)同一發(fā)射站最多有一個測量,則目標(biāo)的測量-發(fā)射站的正確關(guān)聯(lián)可通過下式獲得:

(10)
式中,
(11)
因為每個測量值的發(fā)射站來源是未知的,其可能來自于S個發(fā)射站中的任何一個,因而在利用這些測量時必須假設(shè)每個測量來自于所有的發(fā)射站。這樣測量的數(shù)目變?yōu)榱嗽瓉淼腟倍。假設(shè)有M個測量,則每個發(fā)射站對應(yīng)的測量會有M+1個(需要考慮某發(fā)射站漏檢的情況),如圖2所示。
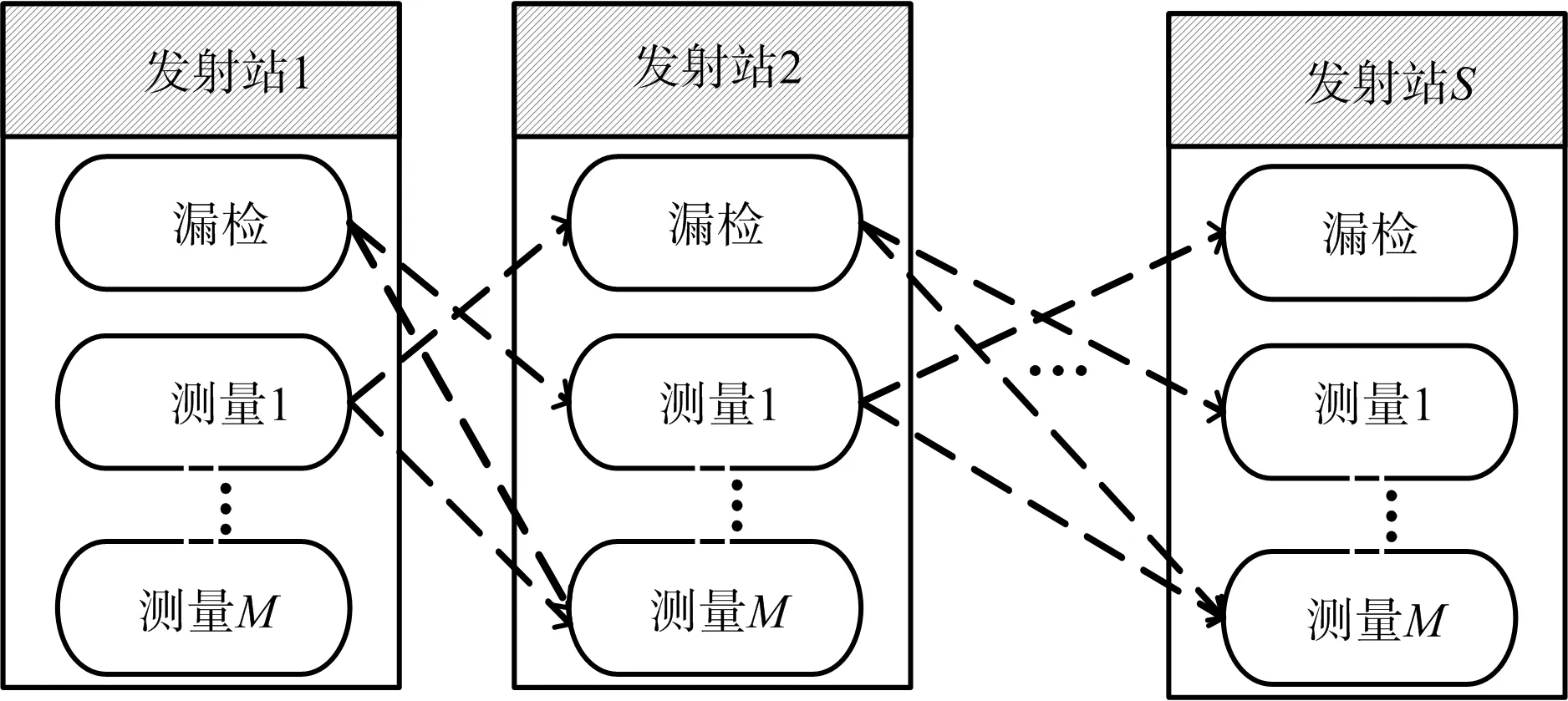
圖2 測量-發(fā)射站關(guān)聯(lián)示意圖

圖3 關(guān)聯(lián)問題示意圖
假設(shè)有S個發(fā)射站、1個接收站、N個目標(biāo)和M個測量,則需要關(guān)聯(lián)的事件的數(shù)目為
(12)
式中,ms表示與發(fā)射站s關(guān)聯(lián)的測量數(shù)目。假設(shè)有3個目標(biāo)、5個發(fā)射站、12個測量,則需要考慮的關(guān)聯(lián)的數(shù)目高達(dá)353 767 425。已經(jīng)被證明[10],當(dāng)發(fā)現(xiàn)概率小于1、發(fā)射站數(shù)目S≥3時,該關(guān)聯(lián)問題是一個NP的問題。
2 基于TOA的定位方法原理
2.1 三維TOA定位方法
TOA定位采用同一目標(biāo)的多個時延測量τs構(gòu)造多個空間曲面求交點即可得到目標(biāo)的位置[11]。
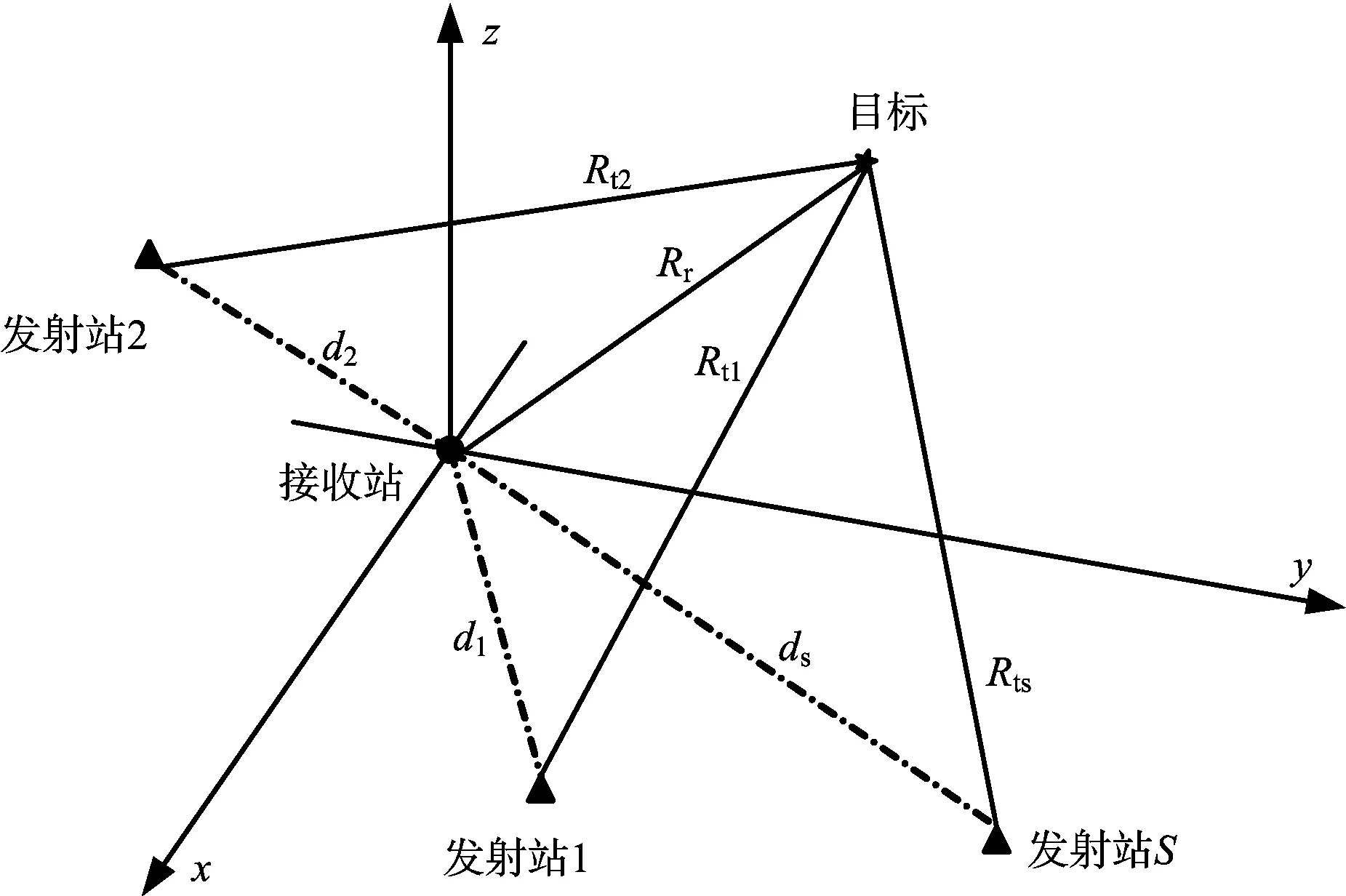
圖4 TOA定位示意圖
如圖4所示,為不失一般性,假設(shè)接收站位置為坐標(biāo)原點RX(0,0,0)T,第s個發(fā)射站位置TXs(xts,yts,zts)T,目標(biāo)位置xt(x,y,z)T。目標(biāo)與接收站的距離Rr可表示為

(13)
目標(biāo)與發(fā)射站之間的距離可表示為
(14)
同樣,第s個發(fā)射站與接收站之間基線的距離可表示為
(15)
通過時延信息可以獲得目標(biāo)與發(fā)射站和接收站的距離和信息:

(16)
則上式變形可得
(17)
兩邊平方可得
(18)
令
(19)
則
Qxt=P+rRr
(20)
式中,r表示S個發(fā)射站-接收站的距離和信息向量,r=[R1,R2,…,RS]T。如果Rr已知,目標(biāo)的最小均方誤差解可表示為

(21)
假設(shè)
(22)
則有

(23)

(24)
方程的解為

(25)
2.2 估計目標(biāo)高度的二維TOA定位方法
假設(shè)目標(biāo)位置為xt(x,y,H),其中H表示根據(jù)目標(biāo)的飛行高度范圍估計的目標(biāo)高度,則目標(biāo)與接收站的距離為

(26)
目標(biāo)與發(fā)射站之間的距離可表示為

(27)
通過時延信息可以獲得目標(biāo)與發(fā)射站和接收站的距離和信息:
(28)
則可得
(29)
兩邊平方可得

(30)
令
(31)
則
Qxt=P+rRr
(32)
如果Rr已知,目標(biāo)的最小均方誤差解可表示為
x′t=[x,y]T=(QTQ)-1QTP+(QTQ)-1QTrRr
(33)
假設(shè)
(34)
則有
x′t=a+bRr
(35)

(36)
方程的解為
(37)
2.3 定位精度分析
同一目標(biāo)經(jīng)過不同發(fā)射站照射可以得到多個距離和測量,根據(jù)多個距離和測量信息對應(yīng)的發(fā)射站-目標(biāo)-接收站空間關(guān)系可以得到目標(biāo)的空間位置。距離和測量公式兩邊求微分可得
dRi=(ci1+cr1)dx+(ci2+cr2)dy+kzi+
kti+kr,i=1,2,…,S
(38)

kti=-(ci1+cr1)dxti-(ci2+cr2)dyti-
(ci3+cr3)dzti
kr=-(ci1+cr1)dxr-(ci2+cr2)dyr-
(ci3+cr3)dzr
kzi=(ci3+cr3)dH

dY=CdX+dXR
(39)
目標(biāo)位置誤差矢量為
dX=(CTC)-1CT(dY-dXR)
(40)
假設(shè)不同發(fā)射站得到距離和的測量誤差不相關(guān),站址誤差不變,則定位誤差協(xié)方差為
P=E[dXdXT]=

(41)
式中,
(42)

(43)
式中,δRi表示第i個發(fā)射站與接收站的距離和的標(biāo)準(zhǔn)差,δs表示站址誤差,δH表示目標(biāo)估計高度與真實高度偏差的標(biāo)準(zhǔn)差。則基于TOA信息的定位精度表示為

(44)
3 仿真實驗分析
仿真條件:接收站坐標(biāo)(30,40,0.1)km,發(fā)射站1坐標(biāo)(-40,30,0.1)km,發(fā)射站2坐標(biāo)(0,0,0.2)km,發(fā)射站3坐標(biāo)(50,0,0.1)km,距離和測量誤差30 m,站址誤差10 m,目標(biāo)位置在如圖5所示軌跡上,飛行高度7~11 km隨機選取。
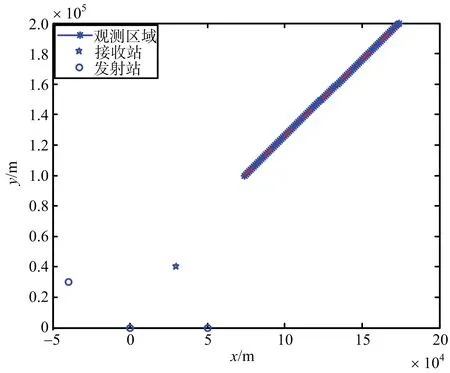
圖5 仿真場景
如圖6(a)和圖6(b)所示,在雙基距離較小時,三維定位算法在二維平面的定位精度要高于二維定位方法的定位精度,當(dāng)雙基距離較大時二維定位算法的定位精度較高。在圖6(c)和圖6(d)中可以發(fā)現(xiàn),三維定位算法在高度方向的定位精度隨雙基距離增加衰減較為嚴(yán)重,當(dāng)雙基距離超過350 km時,高度方向的定位誤差甚至大于10 km,而根據(jù)目標(biāo)的實際情況估計的目標(biāo)高度誤差較為穩(wěn)定。綜合圖6可知,當(dāng)目標(biāo)距離較近時,三維定位方法的定位精度較高;當(dāng)目標(biāo)距離較遠(yuǎn)時,三維定位方法的高度定位誤差很大,導(dǎo)致目標(biāo)的定位精度降低。而單頻網(wǎng)外輻射源雷達(dá)屬于預(yù)警探測雷達(dá)的一種,主要針對遠(yuǎn)距離目標(biāo)的探測和監(jiān)視,因而二維定位方法相對三維定位方法更加適用。
(a) 三維定位方法二維定位誤差
(b) 二維定位方法二維定位誤差
(c) 三維定位方法高度定位誤差
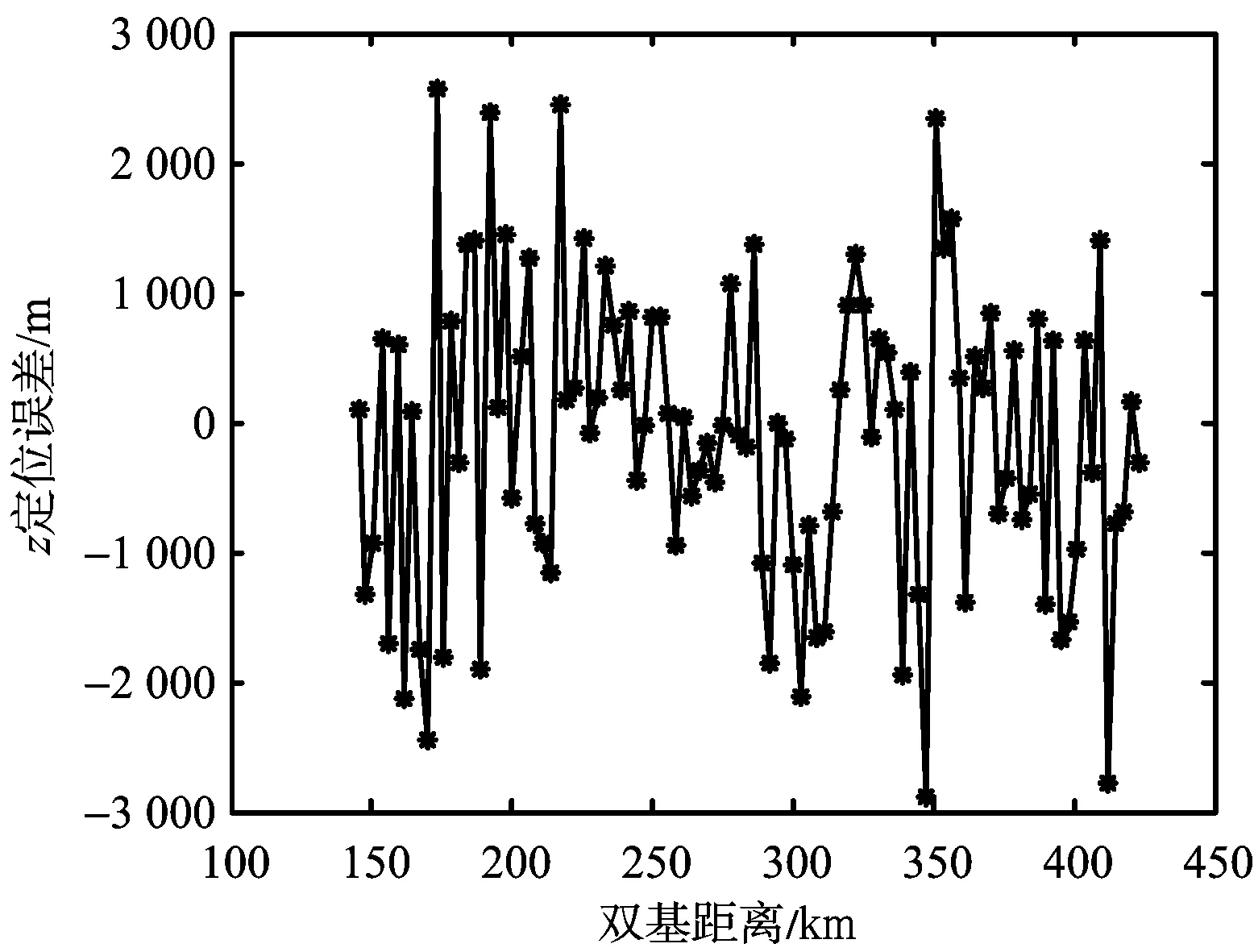
(d) 目標(biāo)高度估計誤差圖6 定位誤差分析
而由之前的工作[13]可知,估計目標(biāo)的距離和誤差越大,正確關(guān)聯(lián)的概率越小,在單頻網(wǎng)外輻射源雷達(dá)定位方法選擇時必須確保估計目標(biāo)的估計誤差盡量的小以保證較高的關(guān)聯(lián)概率。圖7表示目標(biāo)估計的距離和誤差。
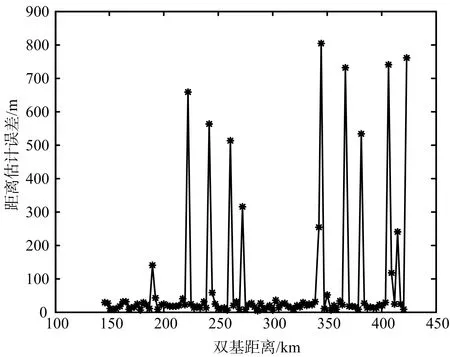
(a) 三維定位方法目標(biāo)距離和誤差
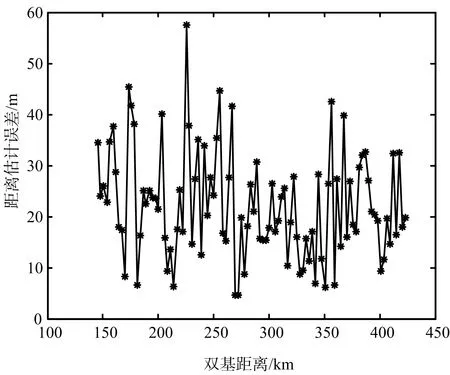
(b) 二維定位方法目標(biāo)距離和誤差圖7 距離和誤差分析
目標(biāo)距離和誤差的測量值一般小于一個距離單元的距離(對于10 MHz采樣率的數(shù)字電視信號,一個距離單元雙基30 m),因而可以將距離和的測量值作為目標(biāo)距離和的真值。當(dāng)目標(biāo)距離和的估計值與測量值相差較小時,可以完成正確關(guān)聯(lián)。由圖7(a)和圖7(b)可知,三維定位方法獲得的目標(biāo)距離和誤差存在很多奇點會導(dǎo)致關(guān)聯(lián)概率降低,錯誤關(guān)聯(lián)數(shù)目上升,而估計目標(biāo)高度的二維定位方法獲得的距離和誤差較小較穩(wěn)定,能夠更好地保證測量-發(fā)射站關(guān)聯(lián)質(zhì)量。
4 結(jié)束語
本文建立了單頻網(wǎng)外輻射源雷達(dá)測量-發(fā)射站關(guān)聯(lián)模型,分析了測量-發(fā)射站關(guān)聯(lián)問題對后續(xù)數(shù)據(jù)處理的影響。然后從目標(biāo)定位算法選擇的角度出發(fā),分析了不同定位方法的定位精度以及對測量-發(fā)射站關(guān)聯(lián)問題的影響,并通過一個三發(fā)單收的單頻網(wǎng)外輻射源雷達(dá)定位模型進(jìn)行了仿真驗證。綜合目標(biāo)的二維定位精度和目標(biāo)距離和估計誤差可以發(fā)現(xiàn),估計目標(biāo)高度的二維定位方法更適合單頻網(wǎng)外輻射源雷達(dá)的定位和測量-發(fā)射站解模糊。
猜你喜歡
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
讀者(2017年5期)2017-02-15 18:04:18
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21