變電站智能巡檢機器人應用提升研究
2019-09-02 08:35:12馮正偉孟憲華黃浩林梁上至靳利光
浙江電力 2019年8期
馮正偉,孟憲華,黃浩林,梁上至,王 韜,梁 慧,靳利光
(國網浙江省電力有限公司檢修分公司,杭州 311232)
0 引言
隨著國民經濟的快速發展,電網規模迅速擴大,新建變電站大量投運以及人力資源日益緊缺,傳統的運維檢修工作亟待通過技術手段實現減員增效。而工業物聯網、人工智能、大數據、云平臺等智能化、自動化技術的快速發展,為變電站智能巡檢機器人的研究和應用提供了有利條件。
變電站智能巡檢機器人的應用推廣,實現了變電站傳統運維業務的大變革,其通過智能、自主的方式替代人工完成大量重復性、機械性的運維巡檢任務,進一步解放了人力資源,為變電站的無人值守提供可靠的技術支撐[1]。本文通過對當前主流智能巡檢機器人的關鍵技術進行詳細對比分析,在充分調研變電站智能巡檢機器人實際應用情況的基礎上,提出相關優化改進措施。
1 智能巡檢機器人應用情況
1.1 整體應用情況
變電站智能巡檢機器人可通過搭載可見光攝像機、紅外熱像儀等傳感檢測設備,利用自主導航、圖像識別、紅外帶電檢測、自動充電等智能化、自動化技術,通過自主或遙控模式實現對變電站設備、周圍環境的智能巡檢[2-5]。
目前,變電站智能巡檢機器人可實現變電站內的設備外觀巡視、設備紅外測溫、表計自動抄錄、高清圖像對比以及氣象數據采集等功能,給變電運維工作帶來了極大的便利,實現了運維工作的減負增效[6]。但由于自主導航、圖像處理、超聲波避障等相關技術尚處于發展起步階段,相關技術的工程應用經驗欠缺,導致在現場應用中,智能巡檢機器人經常出現因導航定位丟失而脫軌、自主充電失敗、表計識別不精確、運行穩定性不高等諸多問題。
1.2 智能巡檢機器人導航方式
機器人在未知環境中,要實現智能化需要完成定位、建圖、路徑規則。因此,導航定位是智能巡檢機器人能否完全自主運行的關鍵,智能巡檢機器人導航系統的性能直接決定了其完成巡檢任務的質量和效率[5]。變電站智能巡檢機器人可采用磁軌導航、激光導航、GPS 導航、視覺導航等方式。由于早期采用磁軌導航方式的智能巡檢機器人存在磁軌鋪設工作量大、維護成本高、運行路線不靈活、越障高度受限等問題,目前投運的智能巡檢機器人已全部采用激光導航,可實現自動路徑導航[7]。
近年來各智能巡檢機器人廠家均采用了激光導航方式,該方式利用旋轉激光傳感器檢測環境中的路標,采用SLAM(同時定位與建圖)技術獲取精確的變電站環境地圖,經三角幾何計算得到傳感器在全局坐標系下的位置和方向,并預先存儲環境中所有路標在全局坐標系下的坐標值,機器人導航時定位傳感器自動將檢測到的路標與存儲的路標進行匹配,進而計算得到機器人位置航向信息[8-11]。圖1 給出了巡檢機器人導航控制原理,其中ΔS,Δθ 分別為期望的位置偏差和航向偏差;分別為實際的位置偏差和航向偏差;ΔSc,Δθc分別為最終計算的位置偏差和航向偏差。
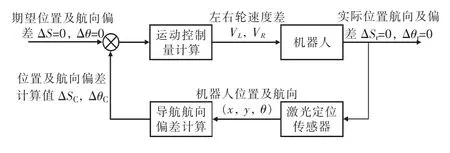
圖1 巡檢機器人導航控制原理
巡檢機器人導航過程中位置及航向偏差如圖2 所示。圖中旋轉激光傳感器轉動中心與機器人運動中心重合,傳感器坐標系中的x 軸與機器人縱軸重合,這樣激光定位得到的坐標和方向即為機器人在全局坐標系下的位置(x,y)和航向θ,其中分別為機器人在全局坐標系下的起點坐標、終點坐標和當前坐標,d 為機器人當前位置與停靠位置之間的距離。
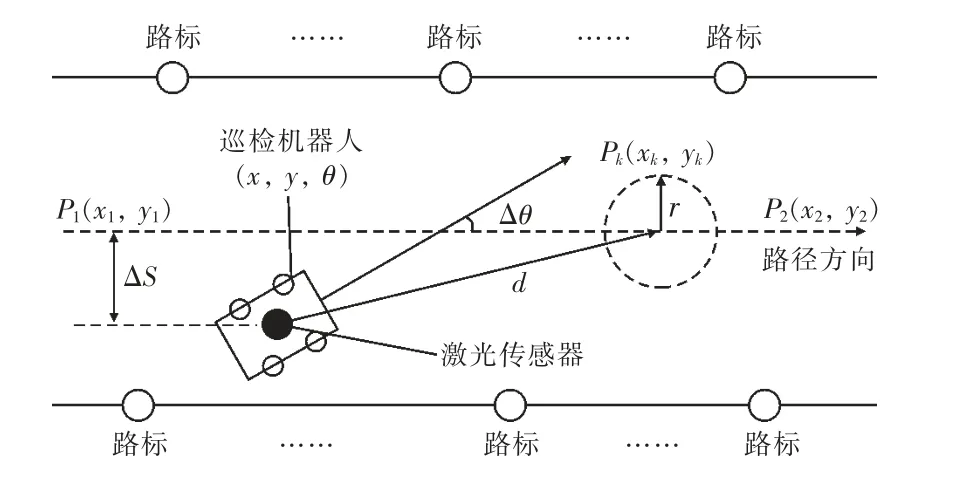
圖2 巡檢機器人位置及航向偏差示意
因此,傳感器坐標體系中的路標是激光導航的重要參照物,工程應用中巡檢機器人激光地圖的制作多以變電站設備架構、支柱、樹木等作為路標標識物,一旦路標參考物發生變化,巡檢機器人將失去坐標而偏離軌道。 在實際運行過程中,巡檢機器人由于參考路標的變化(如樹木長高、站內綠化維護等)而脫軌的現象時有發生。
1.3 巡檢機器人轉向問題
巡檢機器人運動過程中的轉向方式主要有三種:第一種是機器人配置8 個驅動電機,運動中的轉向通過4 個輪的轉向電機實現;第二種是機器人配置4 個驅動電機,運動中轉向通過左右兩邊驅動輪的速度差實現原地轉向;第三種是機器人由驅動輪和萬向輪組成,運動中通過使2 個驅動輪產生速度差實現轉向。三種驅動模式優缺點對比詳見表1。
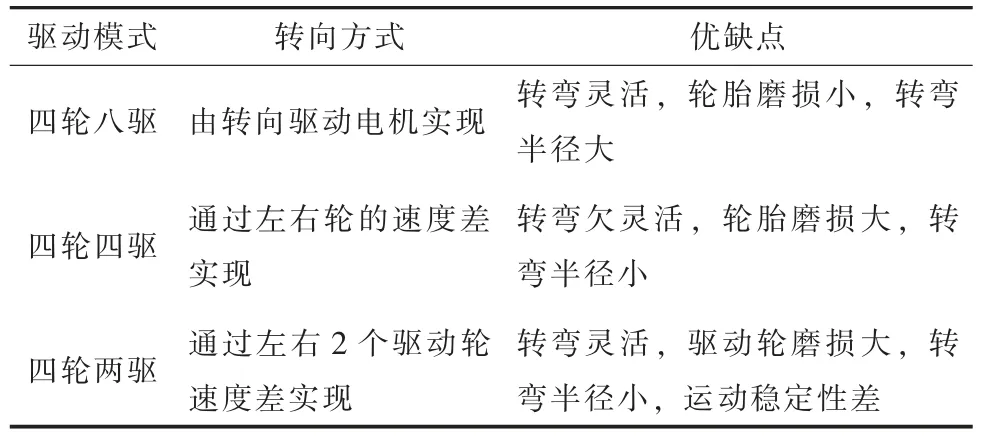
表1 巡檢機器人轉向方式對比
1.4 檢修區域設置
采用激光導航方式的巡檢機器人受環境參照物的影響較大,為避免設備檢修區域的安全圍欄影響機器人自主導航運行,在運行維護中會根據檢修設備的安措圍欄范圍在機器人的巡檢路徑上劃定相應的檢修屏蔽區域,讓機器人在執行巡檢任務時自動避開設備檢修區。
由于現場檢修設備的安措圍欄位置與機器人監控后臺中劃定的檢修區域范圍存在較大誤差,目前只能在機器人監控后臺中擴大檢修區域范圍來避免檢修區安措圍欄對機器人的影響。但采用該方法會導致某個設備間隔檢修時,相鄰的2~3個間隔設備機器人均無法巡檢。如圖3 所示,當間隔Ⅱ設備停電檢修時,由于安措圍欄樁布置得不合理,兩條機器人巡檢道路均位于安措圍欄范圍內,從而導致機器人無法巡檢運行間隔Ⅰ和Ⅲ的設備。
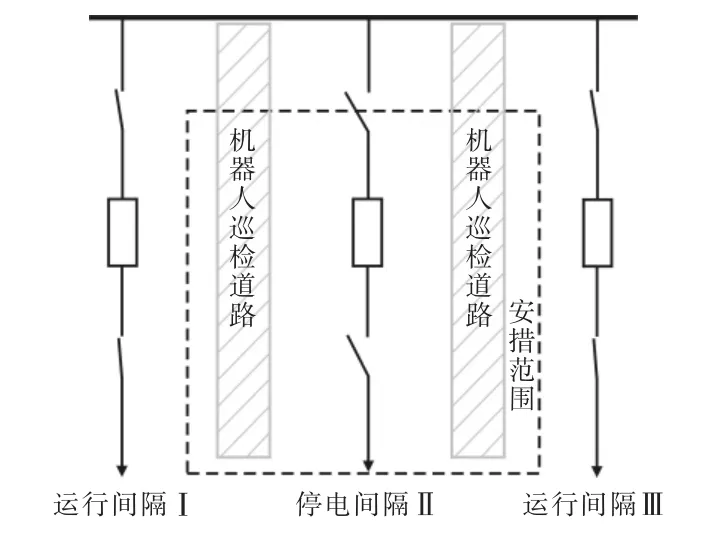
圖3 不合理的安措圍欄布置
因此,對于新建變電站應加強基建階段的介入,讓變電站安措圍欄樁的安裝位置與機器人巡檢設備路徑匹配,盡量減少一個間隔檢修時安措圍欄對其他間隔機器人巡檢的影響。對于已投運變電站,在機器人調試階段應合理設計機器人巡檢點位,避免跨間隔、跨區域巡檢其他間隔的設備,較為合理的變電站安措圍欄布置如圖4 所示。

圖4 合理的安措圍欄布置
1.5 路徑規劃
在實際應用中,部分巡檢機器人存在路徑規劃不合理的問題,如實際運行的路徑并非全局最優路徑或局部最優路徑,導致機器人巡檢任務不夠高效,在電池續航時間內巡檢設備減少[12]。
目前,大多數巡檢機器人的轉彎位置、掉頭位置均在巡檢地圖上設定為固定點。考慮機器人在較窄的道路上轉彎或掉頭時易發生跌落,對于寬度較窄的道路一般均不設置轉彎或掉頭巡檢點。但當這些沒有設置掉頭或轉彎點位的巡檢路徑上出現異物阻擋時,巡檢機器人會停留在原地不動直至電量耗光,而不能智能地倒退或繞開障礙物繼續前行。如圖5 所示,當機器人巡檢道路2 上遇到障礙物阻擋時,巡檢機器人會觸發超聲波停障功能,立即停止前行。而該道路上的巡檢點位全部為單向巡檢點位,機器人遇到障礙物停止后便無法調頭或轉彎繼續前行。因此,針對此類狹窄道路,需優化路徑點位設置方式,可設置為雙向巡檢點,當機器人遇到障礙物停止前進時,可采用機器人倒行的方式避開狹窄道路上的障礙物,直到最近一個轉彎點后調轉車頭繼續前進。
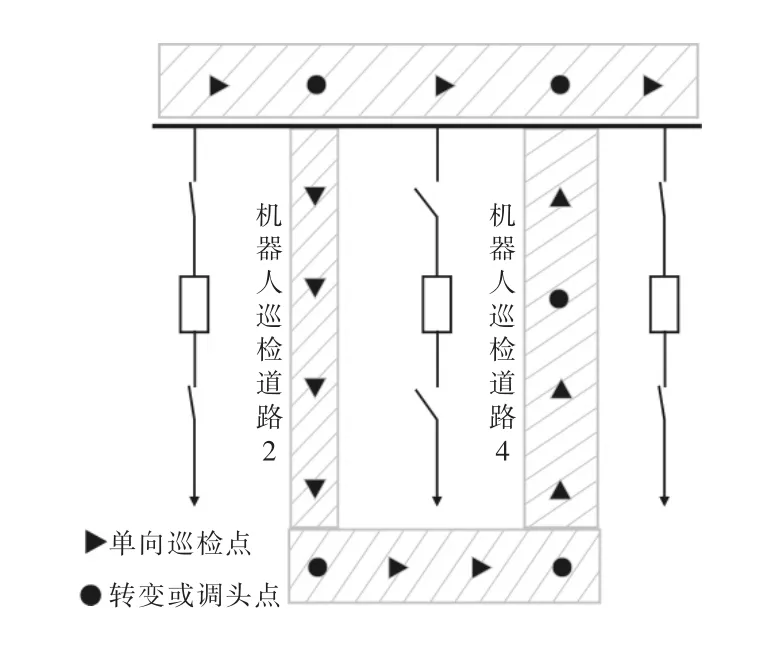
圖5 巡檢機器人的巡檢點位示意
1.6 其他相關問題
(1)部分巡檢機器人存在硬件質量不過關問題,如機器人運行一段時間后續航時間縮短,輪胎磨損較嚴重;部分機器人在執行紅外測溫工作時,由于云臺振動導致部分點位出現框圖偏移現象。
(2)個別機器人廠家還未使用國網標準化監控系統,未按照國網相關規程進行后臺程序開發;或即使采用了標準化監控后臺,但實際運行不穩定、程序BUG 較多,導致機器人巡檢過程中存在個別點位的圖片無法回傳至后臺、后臺巡檢報表誤告警、后臺系統中“自定義任務”功能不完善等問題。
2 巡檢機器人應用優化措施
導航、定位的精度是巡檢機器人能否自動、自主可靠運行的關鍵,當導航出錯、定位偏差時巡檢機器人將偏離預設路徑,從而影響巡檢結果或導致拋錨停機。因此,針對目前普遍采用激光導航方式的巡檢機器人,在研發設計、現場調試中應考慮相應的優化措施,提高巡檢機器人的運行可靠性和巡檢穩定性。
2.1 激光傳感器的選擇
在進行機器人的研發設計時,優先考慮采用3D 激光傳感器,減小環境因素對巡檢機器人定位精度的影響。激光傳感器作為巡檢機器人地圖創建及定位導航系統的核心設備,主要負責探測機器人周邊環境中物體相對于傳感器中心的距離,其作用如圖6 所示。然而在其與外部環境交互過程中,外部環境中各種因素必然會直接或間接施加于傳感器本身,進而影響傳感器的實際測距性能[13]。
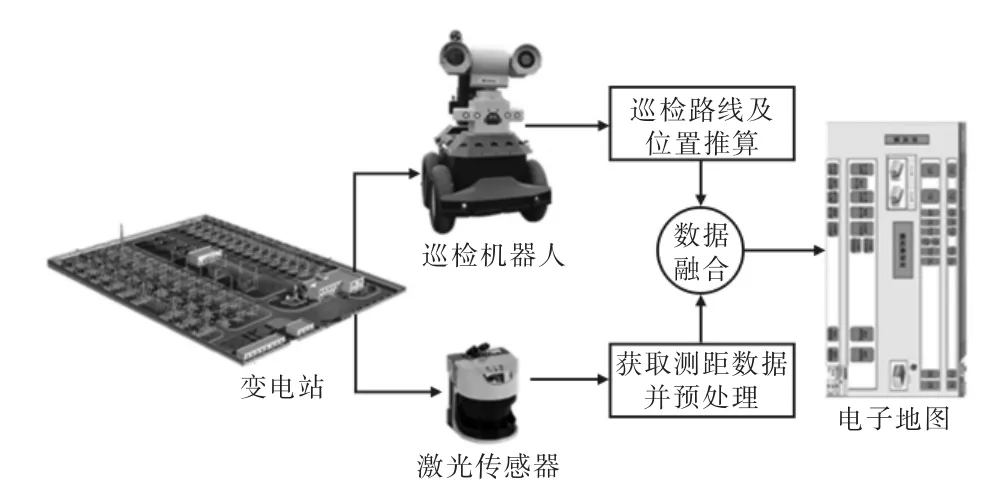
圖6 激光傳感器作用
目前,大部分廠家巡檢機器人采用2D 激光傳感器作為導航設備。用2D 激光傳感器進行導航定位時,僅用單線激光掃描一個水平面進行二維定位,獲取精密的二維定位數據后,再通過相應算法解算三維激光點云,形成一個完整的三維空間數據。但在機器人實際運動中是無法始終保持激光傳感器在同一個水平面上,地面的顛簸、行進的速度、輪胎的磨損、環境的變化都會導致定位失準,使得經算法解析的三維數據混亂。
而采用3D 激光傳感器進行導航定位時,在獲取水平面二維數據的同時,也會獲得垂直方向-30°~+30°左右的數據,從而形成完整的三維空間數據,再通過三維數據的特征點匹配進行定位,最后在三維定位基礎上來解算和匹配完整的三維數據。即使當機器人輪胎輕微磨損、環境輕微變化時,通過后臺算法進行補償,可減小對巡檢機器人導航定位的影響[14]。
目前已在浙江500 kV 吳寧變電站開展了智能巡檢機器人2D 激光導航升級為3D 激光導航的試點應用。進行重復導航定位誤差時,重復執行2 項巡視任務3 次,對10 個巡檢點檢查重復導航定位誤差,并算取誤差平均值;進行巡檢點位偏差統計時,連續10 天按例行巡檢計劃執行任務,統計10 天內巡檢結果中定位偏差大于10 mm的巡檢點數量。從整體應用情況來看,3D 激光導航較2D 激光導航具有更高的穩定性、精確性,現場測試及應用跟蹤情況如表2 所示。

表2 激光導航穩定性測試
2.2 輪胎的選擇
據不完全統計,國網浙江檢修分公司服務范圍內42 臺智能巡檢機器人2018 年度的維保消缺記錄中,共發生故障消缺70 次,其中由于巡檢機器人輪胎及輪轂問題導致的定位失敗、巡檢脫軌多達13 起,占總故障次數的18.6%,詳細統計數據如表3 所示。

表3 巡檢機器人故障原因統計
因此,在進行巡檢機器人硬件選型時,應充分考慮輪胎故障對機器人導航定位的影響,盡量選擇鏤空實心輪胎,避免選擇充氣輪胎。若采用充氣輪胎,一旦巡檢機器人的輪胎氣壓發生變化,將直接導致機器人行進過程因定位偏差而出軌。采用實心輪胎后,也應視巡檢機器人輪胎磨損程度定期更換,避免由于輪胎磨損導致的定位偏移、自主充電失敗、脫軌跌落等故障。
2.3 驅動方式的選擇
通過對比已有巡檢機器人的幾種驅動方式,結合現場運行情況可以看出,采用四輪四驅方式的巡檢機器人在原地轉向過程中對輪胎的磨損特別嚴重,會直接導致巡檢機器人出現定位偏移而脫軌。圖7 為變電站現場采用四輪四驅模式的巡檢機器人輪胎磨損案例,可見其輪胎磨損已非常嚴重。

圖7 四輪四驅方式巡檢機器人輪胎磨損情況
因此,在進行巡檢機器人設計時,應盡量采用四輪八驅的方式,優化動力學控制模型,提升巡檢機器人在復雜路況下的運動控制性能,解決巡檢機器人運動控制系統的魯棒性和舒適性問題,減少機器人在轉彎或原地調頭過程中輪胎與地面的摩擦,減緩機器人輪胎的磨損速度,提高機器人的可靠運行時間。
2.4 激光建圖注意事項
巡檢機器人的地圖數據由一系列激光路標組成,每個路標又包含了其在加入地圖時的全局坐標系位置以及預處理后的激光測距數據。如圖8所示,巡檢電子地圖的建立與路標參數息息相關,路標的位置數據是整個電子地圖的基礎[15]。
因此,在巡檢機器人的激光建圖過程中,路標參考物的選擇顯得尤為重要。機器人的巡檢路徑規劃應盡量選擇設備構架、支柱、房屋等位置固定、外觀不易變化的物體作為參考路標,應避免選擇樹木、植被等外觀形狀易發生變化的物體作為參考物。

圖8 創建巡檢電子地圖
2.5 數據傳輸的安全性
目前,各變電站的巡檢機器人監控系統后臺與移動的巡檢機器人之間通過自建的無線網橋基站實現巡檢數據的無線傳輸,而機器人使用的無線網絡屬于私有無線WIFI 網絡,不滿足電力系統內網數據接入的安全要求。因此,巡檢機器人系統一直作為獨立系統存在,機器人紅外測溫、表計識別等數據無法直接接入PMS(生產管理系統),無法實現數據的互通與共享。
國網公司電力無線專網的建設為巡檢機器人數據接入生產信息內網創造了條件。巡檢機器人可通過加密芯片經1.8G 電力無線專網傳輸數據,機器人監控后臺數據經過安全數據平臺后接入生產信息內網交換機。目前,浙江500 kV 涌潮變電站的智能巡檢機器人已加裝南瑞CPE(客戶終端設備)安全加密模塊,通過變電站1.8G 基站的RRU(遙控射頻單元)收發信號,經BBU(基帶處理單元)將信號調制解調后,通過安全數據接入平臺接入電力信息內網,徹底解決了巡檢機器人以往通過自建WIFI 傳輸數據帶來的安全性問題。巡檢機器人具體接入內網方案如圖9 所示。
3 高級應用
3.1 巡檢機器人與VR 技術結合
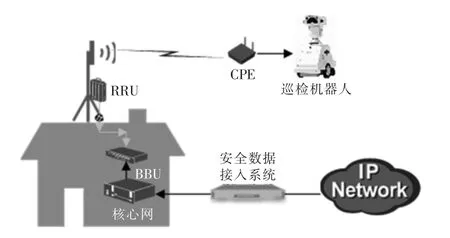
圖9 巡檢機器人接入內網方案
研究變電站智能巡檢機器人與VR(虛擬現實)仿真技術的融合協同,通過建立高精度的變電站可視化三維仿真模型,利用VR 技術實現變電站的情景模擬,并在高精度的變電站三維仿真場景中置入模擬的巡檢機器人,詳見圖10。當無人值守變電站中發生設備異常時,便可通過VR 設備直接快速遙控巡檢機器人第一時間趕赴現場檢查確認。通過將變電站三維仿真環境中集成設備實時數據和機器人現場采集數據進行疊加處理與分析,使運維人員能夠更加精準、實時、真實、沉浸式地監測變電站狀態和進行事故異常處置,達到真正人機協同工作的目的,大大提升無人值守變電站的事故應急響應速度。
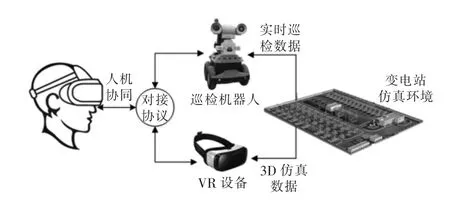
圖10 巡檢機器人與VR 仿真結合
3.2 巡檢機器人與SCADA 系統聯動
智能巡檢機器人與變電站SCADA(監控與數據采集)系統之間,可采用DL/T 860 協議進行數據通信,中間設置橫向加密裝置進行安全隔離,以滿足電網數據傳輸的安全要求。通過巡檢機器人與變電站SCADA 系統的聯動配合,實現一次設備遙控操作前后狀態的自動校驗以及重要遙信告警信號的狀態確認。當無人值守變電站SCADA系統發生斷路器SF6壓力告警、油壓低告警等重要遙信告警時,巡檢機器人可立即啟動對應的臨時巡檢任務,自動完成相應告警信息的現場檢查,并將檢查結果以圖片和報告形式上傳遠端后臺,為運維人員的應急處置提供可靠判據。巡檢機器人與SCADA 系統的聯動流程如圖11 所示。
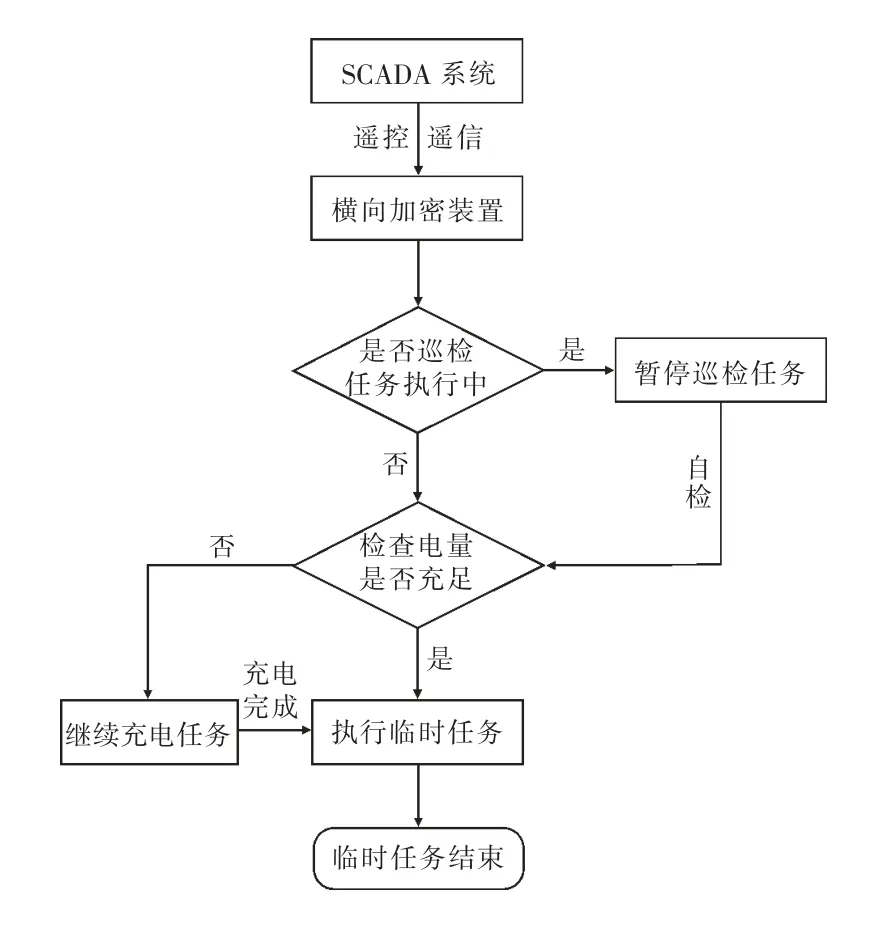
圖11 巡機器人與SCADA 系統聯動流程
3.3 巡檢機器人與PMS 融合
巡檢機器人采用電力無線專網后,已滿足電網信息安全的要求,可通過SDK(軟件開發工具包)對接協議或API(應用程序接口)將巡檢機器人與PMS 進行無縫對接。機器人的巡檢結果待人工確認正確性后,以固定格式或標準字段自動回傳至PMS 系統,實現巡檢結果的自動填報,減輕運維人員的工作量。
4 結語
隨著人工智能技術的發展應用,機器人替代人工已成為電網發展的必然趨勢,機器人將成為未來電網發展中不可或缺的角色。但現階段變電站智能巡檢機器人在實際應用中還存在各種軟、硬件方面的問題,通過在實際應用中不斷總結、摸索,對智能巡檢機器人的導航方式、定位精度、路徑規劃算法、硬件設計等方面進行優化、改進,提升巡檢機器人在復雜環境下的自適應能力,提高其自主運行過程中的穩定性、可靠性、精確性,為變電站的智能化運維提供可靠的技術手段。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00