機(jī)電液聯(lián)合仿真在農(nóng)機(jī)設(shè)備研發(fā)中的應(yīng)用研究
2019-08-30 06:02:39李力
農(nóng)業(yè)與技術(shù) 2019年14期
摘 要:為提高農(nóng)機(jī)設(shè)備研究工作中機(jī)械、電子、液壓聯(lián)合仿真的效率,分析了AMESim及Simulink外部接口的特點(diǎn),提出了一種對(duì)復(fù)雜系統(tǒng)的機(jī)械系統(tǒng)、液壓系統(tǒng)以及控制策略進(jìn)行聯(lián)合仿真的技術(shù)方案, 并通過了仿真驗(yàn)證,為農(nóng)機(jī)設(shè)備研發(fā)過程中機(jī)電液系統(tǒng)的聯(lián)合仿真提供了一種解決方案。
關(guān)鍵詞:AMESim;Simulink;聯(lián)合仿真;主動(dòng)懸架
中圖分類號(hào):S-3文獻(xiàn)標(biāo)識(shí)碼:A
DOI:10.19754/j.nyyjs.20190730022
引言
十三五規(guī)劃明確提出,我國(guó)將全面推進(jìn)農(nóng)業(yè)現(xiàn)代化,提高農(nóng)業(yè)技術(shù)裝備和信息化水平,因此,農(nóng)業(yè)裝備的現(xiàn)代化是實(shí)現(xiàn)我國(guó)農(nóng)業(yè)現(xiàn)代化的重要保障。隨著電子技術(shù)的發(fā)展,特別是微控制技術(shù)、物聯(lián)網(wǎng)技術(shù)和信息技術(shù)的飛速發(fā)展,智能控制技術(shù)與傳統(tǒng)的機(jī)械技術(shù)的結(jié)合越來越緊密,農(nóng)業(yè)機(jī)械也由傳統(tǒng)的液壓傳動(dòng)技術(shù)為主轉(zhuǎn)向機(jī)電液一體化方向發(fā)展,進(jìn)而實(shí)現(xiàn)農(nóng)業(yè)機(jī)械的自動(dòng)化、網(wǎng)絡(luò)化和智能化。
現(xiàn)代農(nóng)機(jī)設(shè)備越來越趨向于機(jī)電液集成化,與之對(duì)應(yīng)的仿真技術(shù)也朝著機(jī)電液聯(lián)合仿真的方向發(fā)展。本文在對(duì)AMESim和Simulink的特性及其外部接口進(jìn)行深入研究分析后,提出了一種對(duì)復(fù)雜系統(tǒng)的機(jī)械系統(tǒng)、液壓系統(tǒng)以及控制策略進(jìn)行聯(lián)合仿真的技術(shù)方案[1,2]。
1 AMESim與MATLAB/Simulink的聯(lián)合仿真接口? AMESim在機(jī)械系統(tǒng)以及液壓系統(tǒng)仿真方面有著突出的優(yōu)勢(shì),隨著機(jī)器設(shè)備自動(dòng)化程度的提高,各種控制算法、控制策略被越來越多的應(yīng)用于其控制系統(tǒng)中。因此,在系統(tǒng)仿真時(shí),往往希望能對(duì)整個(gè)系統(tǒng)的機(jī)械、液壓、控制算法進(jìn)行聯(lián)合的仿真,對(duì)系統(tǒng)的整體性能進(jìn)行研究、分析。然而,目前來看AMESim只提供了非常簡(jiǎn)單的幾種控制算法模型,無法滿足越來越復(fù)雜的算法仿真要求。而Simulink在邏輯運(yùn)算、算法建模方面有著顯著的成就,因此,將AMESim與Simulink聯(lián)合起來,取長(zhǎng)補(bǔ)短,在機(jī)械、液壓及其控制系統(tǒng)的仿真中將取得單個(gè)軟件難以比擬的效果[3]。
AMESim與Simulink的聯(lián)合仿真有2種實(shí)現(xiàn)方式:在AMESim中搭建機(jī)械、液壓系統(tǒng)模型,經(jīng)過AMESim的仿真參數(shù)設(shè)置及編譯,生成能在Simulink中調(diào)用的S-Function,在Simulink環(huán)境中完成控制算法模型搭建,然后像調(diào)用普通S-Function一樣將在AMESim生成的機(jī)械、液壓系統(tǒng)模型S-Function調(diào)入到Simulink中,從而完成整個(gè)仿真系統(tǒng)的搭建,仿真運(yùn)行于Simulink環(huán)境之中,使用Simulink的求解器進(jìn)行計(jì)算仿真;在Simulink環(huán)境中完成控制算法的設(shè)計(jì),通過編譯后調(diào)用由MTALAB提供的SL2AME函數(shù),將在Simulink環(huán)境中完成的控制算法轉(zhuǎn)換為能在AMESim中調(diào)用的用戶自定義元件模型,在AMESim中,將機(jī)械、液壓系統(tǒng)模型搭建后,像使用普通元件模型一樣調(diào)用由SL2AME函數(shù)生成的控制算法元件模型,完整的仿真系統(tǒng)搭建完畢后,在AMESim中運(yùn)行仿真運(yùn)算[3]。
筆者通過2種聯(lián)合方式實(shí)驗(yàn)的對(duì)比發(fā)現(xiàn):在機(jī)械及液壓系統(tǒng)規(guī)模較小、元件不多的情況下,2種聯(lián)合仿真方式?jīng)]有明顯的差異;若機(jī)械及液壓系統(tǒng)組成較復(fù)雜、元件比較多,則采用第1種方式仿真時(shí),會(huì)出現(xiàn)仿真速度特別慢,甚至于出現(xiàn)計(jì)算機(jī)死機(jī)的現(xiàn)象,此時(shí)采用第2種方式,即,將在Simulink中生成的控制算法模型導(dǎo)入到AMESim中運(yùn)行時(shí),仿真能達(dá)到比較滿意的效果。基于以上對(duì)比分析,本文將闡述第2種聯(lián)合仿真方案(下文稱作SL2AME方式)的具體實(shí)施步驟。
為實(shí)現(xiàn)AMESim與Simulink的聯(lián)合仿真,除正確安裝好AMESim、MATLAB/Simulink外,還需要做以下準(zhǔn)備:
由于SL2AME接口是將在實(shí)時(shí)工作空間中的Simulink模型轉(zhuǎn)換為能在AMESim中執(zhí)行的C代碼,需要確保計(jì)算機(jī)系統(tǒng)中安裝有Microsoft Visual C++。
設(shè)置MATLAB,AMESim環(huán)境變量:
a)MSSDK C:\\Program Files\\Microsoft Visual Studio。
b)MATLAB C:\\MATLAB\\R2008a。
c)Path 加上;C:\\WINDOWS\\system32。
MATLAB設(shè)置:
d)MATLAB命令里運(yùn)行 mex-setup 安裝VC++編譯器。
e)在Matlab路徑設(shè)置里添加:%AME%\\scripting\\matlab\\amesim ; %AME%\\interfaces\\。
f)sl2ame(%AME%代表計(jì)算機(jī)中安裝AMESim 的路徑)。
在AMESim中,將Microsoft Visual C++設(shè)置為當(dāng)前編譯器(Options menu/ AMESim Preferences /Compilation /Parameters)。
至此,AMESim與Simulink的聯(lián)合仿真接口設(shè)置已全部完成。接下來,本文以主動(dòng)懸架系統(tǒng)仿真為例,說明聯(lián)合仿真的步驟并驗(yàn)證此方案的可行性。
2 聯(lián)合仿真模型的建立
主動(dòng)懸架不僅能較大程度隔離因路面不平導(dǎo)致的車身振動(dòng),而且能通過自身的主動(dòng)輸出對(duì)車身姿態(tài)進(jìn)行調(diào)節(jié),甚至在惡劣的路況、劇變的車速等特殊工況下,仍能使車輛保持良好的平順性和安全性[4]。
在進(jìn)行主動(dòng)懸架相關(guān)技術(shù)研究時(shí),在動(dòng)力學(xué)分析時(shí)常采用2自由度的1/4車體模型、4自由度的半車模型或7自由度的整車模型進(jìn)行動(dòng)力學(xué)建模,如若要對(duì)車輛俯仰、側(cè)傾以及垂直跳動(dòng)等運(yùn)動(dòng)姿態(tài)控制和整車控制效果進(jìn)行全面研究,一般采用7自由度的整車模型進(jìn)行動(dòng)力學(xué)建模分析,本文的聯(lián)合仿真即基于整車主動(dòng)懸架控制來進(jìn)行的[5,6]。
整車主動(dòng)懸架機(jī)電液聯(lián)合仿真平臺(tái)包括3部分:懸架機(jī)械結(jié)構(gòu)、液壓系統(tǒng)及控制策略。機(jī)械系統(tǒng)及液壓系統(tǒng)的仿真模型在AMESim中建立,控制算法模型在Simulink環(huán)境中建立。
2.1 AMESim中主動(dòng)懸架機(jī)械結(jié)構(gòu)的建立
為方便研究,在進(jìn)行主動(dòng)懸架系統(tǒng)研究時(shí),將主動(dòng)懸架的機(jī)構(gòu)簡(jiǎn)化為簧上車體質(zhì)量、車輪及簧下質(zhì)量、懸架彈簧、阻尼器、液壓缸。
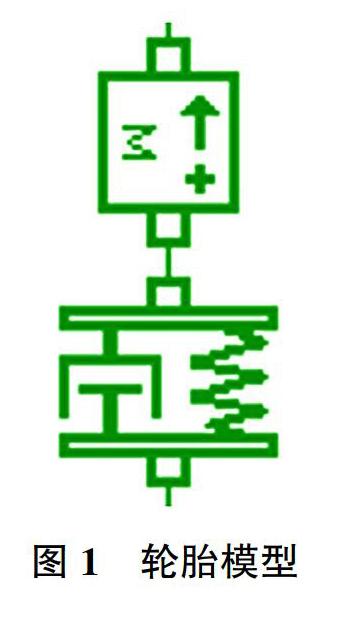
2.1.1 輪胎模型
根據(jù)懸架數(shù)學(xué)模型,將輪胎模型簡(jiǎn)化成為質(zhì)量、剛度和阻尼的系統(tǒng),在AMESim利用組件建立的輪胎模型如圖1所示。
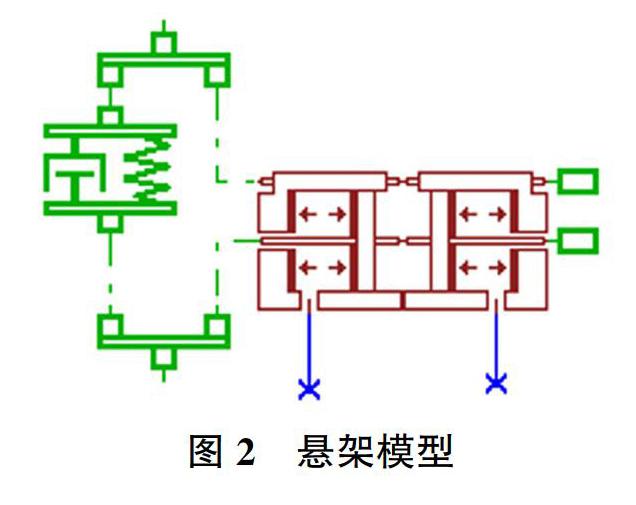
2.1.2 懸架模型
本文所述主動(dòng)懸架采用被動(dòng)減震機(jī)構(gòu)與主動(dòng)液壓缸并聯(lián)的形式,即由彈簧、阻尼器以及液壓缸并聯(lián)而成,在AMESim利用組件建立的懸架模型如圖2所示。
2.1.3 車身
一般來說,AMESim的機(jī)械結(jié)構(gòu)模型常用于一維機(jī)械結(jié)構(gòu)仿真,在進(jìn)行整車主動(dòng)懸架研究時(shí)需要對(duì)車體的三維姿態(tài)進(jìn)行調(diào)控,因此本文根據(jù)整車動(dòng)力學(xué)模型建立了針對(duì)整車主動(dòng)懸架研究和控制的仿真模型(如圖4所示機(jī)械機(jī)構(gòu)部分),該模型可以輸出車身側(cè)傾角及其角加速度、車身質(zhì)心垂向位移及其加速度、車身俯仰角及其角加速度等車身姿態(tài)數(shù)據(jù)[7,8]。
2.2 AMESim中液壓系統(tǒng)仿真模型的建立
本文主動(dòng)懸架結(jié)構(gòu)上采用的是在被動(dòng)獨(dú)立懸架上并聯(lián)一個(gè)輸出主動(dòng)控制力的液壓缸,其優(yōu)點(diǎn)在于能在主動(dòng)與被動(dòng)模式之間切換,當(dāng)主動(dòng)控制系統(tǒng)損壞時(shí),懸架系統(tǒng)能工作在被動(dòng)模式。根據(jù)此思路,在AMESim中建立主動(dòng)懸架的液壓系統(tǒng)仿真模型,整車主動(dòng)懸架液壓系統(tǒng)原理如圖4液壓機(jī)構(gòu)部分所示。
2.3 Simulink中控制策略模型的建立
主動(dòng)懸架的控制核心在于控制策略的設(shè)計(jì),為驗(yàn)證本文的聯(lián)合仿真平臺(tái)的可行性,本文的整車主動(dòng)懸架控制采用基于模糊自整定參數(shù)PID的大系統(tǒng)分散控制策略,由于主動(dòng)架控制的算法不是本文的研究?jī)?nèi)容,所以在此不作詳述。
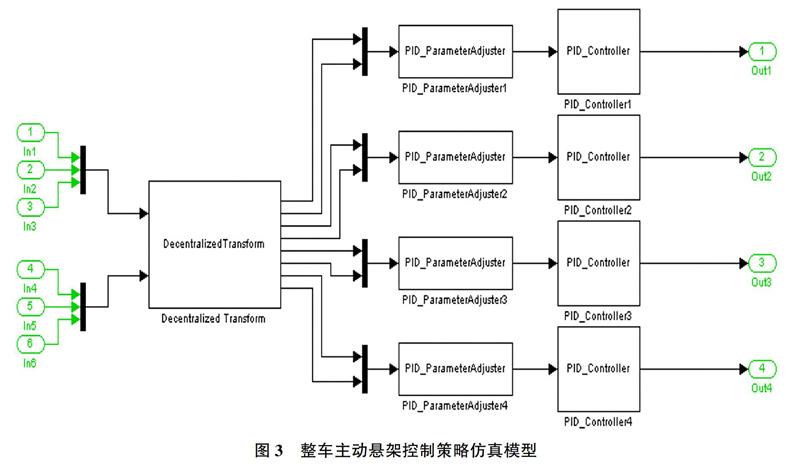
在Simulink中搭建的控制器如圖3所示,由于Simulink中沒有現(xiàn)成的分散變換以及參數(shù)校正模塊,所以模塊中編寫了3個(gè)S函數(shù)完成整車懸架控制懸。
該仿真模型中,“DecentralizedTransform”為分散變換器,用于整車姿態(tài)及振動(dòng)數(shù)據(jù)的分散變換,“Fuzzy_ParameterAdjuster”和“PID_Controller”2個(gè)模塊組成子系統(tǒng)控制器,即模糊自整定參數(shù)PID控制器。
2.4 機(jī)電液聯(lián)合仿真平臺(tái)的搭建
在完成了基于AMESim的主動(dòng)懸架機(jī)械、液壓系統(tǒng)的設(shè)計(jì)和基于Simulink的整車主動(dòng)懸架控制器的設(shè)計(jì)之后,接下來就需要完成整車液壓主動(dòng)懸架系統(tǒng)仿真平臺(tái)的聯(lián)合。
如前文所述,本文采用SL2AME的方式進(jìn)行聯(lián)合仿真,即在Simulink環(huán)境中完成主動(dòng)懸架基于模糊自整定參數(shù)PID的大系統(tǒng)分散控制策略的設(shè)計(jì),通過編譯后調(diào)用由MTALAB提供的SL2AME函數(shù),將該控制算法轉(zhuǎn)換為能在AMESim中調(diào)用的用戶自定義元件模型,在AMESim中,將主動(dòng)懸架機(jī)械、液壓系統(tǒng)模型搭建后,調(diào)用由SL2AME函數(shù)生成的上述控制算法元件模型,完成聯(lián)合仿真平臺(tái)的搭建,之后的聯(lián)合仿真在AMESim中運(yùn)行[3]。
3 聯(lián)合仿真驗(yàn)證
本文采用理想光滑包塊路面在模糊自整定參數(shù)PID控制器控制下對(duì)懸架系統(tǒng)進(jìn)行仿真,以驗(yàn)證聯(lián)合仿真平臺(tái)的可行性,仿真時(shí),在AMESim中設(shè)置仿真時(shí)間為10s,步長(zhǎng)為0.001s,車速為20m/s。
包塊路面輸入產(chǎn)生一個(gè)高度為10cm的光滑凸起包塊,路面曲線如圖5所示。主動(dòng)懸架研究中常用包塊路面分析主動(dòng)懸架對(duì)路面障礙物的適應(yīng)性能及抖動(dòng)收斂性能。
圖6~8為光滑包塊路面輸入下主被動(dòng)懸架俯仰、側(cè)傾和垂向振動(dòng)對(duì)比曲線。從曲線對(duì)比中可以看到,相對(duì)于同一光滑包塊路面沖擊,主動(dòng)懸架的俯仰、側(cè)傾和垂向振動(dòng)幅度及振動(dòng)的收斂速度都優(yōu)于被動(dòng)懸架,與預(yù)期設(shè)想一致,由此可以看出,本文所提出的AMESim與Simulink的機(jī)電液聯(lián)合仿真方案是可行的。
4 小結(jié)
本文分析了AMESim及Simulink外部接口的特點(diǎn),提出了基于S-Function的Simulink與AMESim的機(jī)電液聯(lián)合仿真方案,并以液壓主動(dòng)懸架為例,在AMESim中建立了主動(dòng)懸架機(jī)械結(jié)構(gòu)仿真模型、主動(dòng)懸架液壓系統(tǒng)仿真模型,在Simulink中建立了基于模糊自整定參數(shù)PID的大系統(tǒng)分散控制策略仿真模型,然后調(diào)用由MTALAB提供的SL2AME函數(shù),將在Simulink中建立的控制算法轉(zhuǎn)換為能在AMESim中調(diào)用的用戶自定義元件模型,最后在AMESim中調(diào)用上述控制算法元件模型,完成聯(lián)合仿真平臺(tái)的搭建,通過仿真驗(yàn)證,得到主動(dòng)和被動(dòng)懸架的振動(dòng)曲線圖,通過分析可知,主動(dòng)懸架的性能明顯優(yōu)于被動(dòng)懸架,同時(shí)也證明了本文所提出的基于AMESim及Simulink的機(jī)電液聯(lián)合仿真平臺(tái)方案是可行的,為農(nóng)機(jī)設(shè)備研發(fā)過程中機(jī)電液系統(tǒng)的聯(lián)合仿真提供了一種解決方案。
參考文獻(xiàn)
[1] 陳銀衛(wèi). 拖拉機(jī)電液懸掛控制系統(tǒng)研究[D]. 湖北工業(yè)大學(xué), 2017.
[2] 路少中.電子控制技術(shù)在拖拉機(jī)液壓懸掛系統(tǒng)的研究[J].農(nóng)業(yè)與技術(shù),2018,38(08):93.
[3] 李力. 基于慣性調(diào)控的主動(dòng)懸架技術(shù)研究[D]. 吉林大學(xué),2011.
[4] 嚴(yán)翩. 環(huán)衛(wèi)機(jī)械手的電液伺服系統(tǒng)研究與仿真[D].湖北工業(yè)大學(xué),2016.
[5] 盛云,吳光強(qiáng).7自由度主動(dòng)懸架整車模型最優(yōu)控制的研究[J].汽車技術(shù),2007(06):12-16.
[6] 王靜. 液壓支架試驗(yàn)臺(tái)液壓系統(tǒng)動(dòng)態(tài)特性分析[D].太原科技大學(xué),2010.
[7] 陳蔣, 王淼森, 趙明,等. 玉米播種機(jī)電液播深調(diào)節(jié)裝置運(yùn)動(dòng)仿真與優(yōu)化[J]. 農(nóng)機(jī)化研究, 2017, 39(10):128-132.
[8] 姚國(guó)慶. 簡(jiǎn)述智能農(nóng)機(jī)液壓系常見故障的排除方式[J]. 中國(guó)農(nóng)業(yè)信息, 2017(15):87-88.
