目標(biāo)協(xié)同跟蹤系統(tǒng)圖像監(jiān)控軟件流程設(shè)計(jì)*
2019-08-27 03:47:00任選宏師靖鴻
火力與指揮控制 2019年7期
關(guān)鍵詞:信息
徐 燕,任選宏,師靖鴻,宋 航,賈 婧
(北方自動(dòng)控制技術(shù)研究所,太原030006)
0 引言
隨著現(xiàn)代科學(xué)技術(shù)的發(fā)展,目標(biāo)的機(jī)動(dòng)性能不斷提高,單單依靠單傳感器實(shí)現(xiàn)對(duì)敵方目標(biāo)運(yùn)動(dòng)狀態(tài)作出精確估計(jì),并實(shí)施精確打擊已經(jīng)無(wú)法滿足現(xiàn)代化戰(zhàn)爭(zhēng)需求,必須應(yīng)用包括微波、毫米波、紅外電子援助設(shè)施(ESM)及電子情報(bào)技術(shù)(ELINT)等多傳感器系統(tǒng)提供的多種觀測(cè)數(shù)據(jù)。經(jīng)過(guò)對(duì)觀測(cè)數(shù)據(jù)進(jìn)行優(yōu)化綜合處理,獲取目標(biāo)運(yùn)動(dòng)狀態(tài)估計(jì)、識(shí)別目標(biāo)屬性、分析目標(biāo)行為意圖,并對(duì)態(tài)勢(shì)和威脅進(jìn)行評(píng)估,以此提供精確制導(dǎo)、電子對(duì)抗、作戰(zhàn)模式和輔助決策等信息。
目前對(duì)多傳感器精確配準(zhǔn)算法、多傳感器圖像融合算法、多傳感器目標(biāo)識(shí)別算法、多傳感器目標(biāo)跟蹤算法的研究已經(jīng)很多,本文主要研究基于多傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng),詳細(xì)論述目標(biāo)協(xié)同跟蹤系統(tǒng)中圖像監(jiān)控軟件的流程設(shè)計(jì)。
1 基于多傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng)設(shè)計(jì)方案
基于多傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng)由無(wú)人傳感器平臺(tái)、指揮控制中心、傳輸設(shè)備組成,通過(guò)系統(tǒng)所組建的通信網(wǎng)絡(luò)進(jìn)行指揮和信息的交互,組成圖如圖1所示,系統(tǒng)連接關(guān)系如圖2所示。
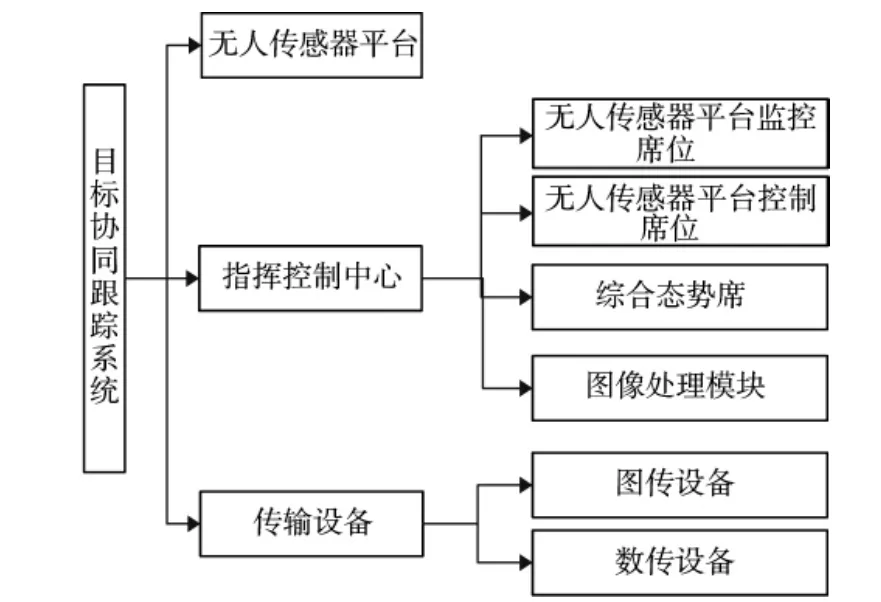
圖1 目標(biāo)協(xié)同跟蹤系統(tǒng)組成圖
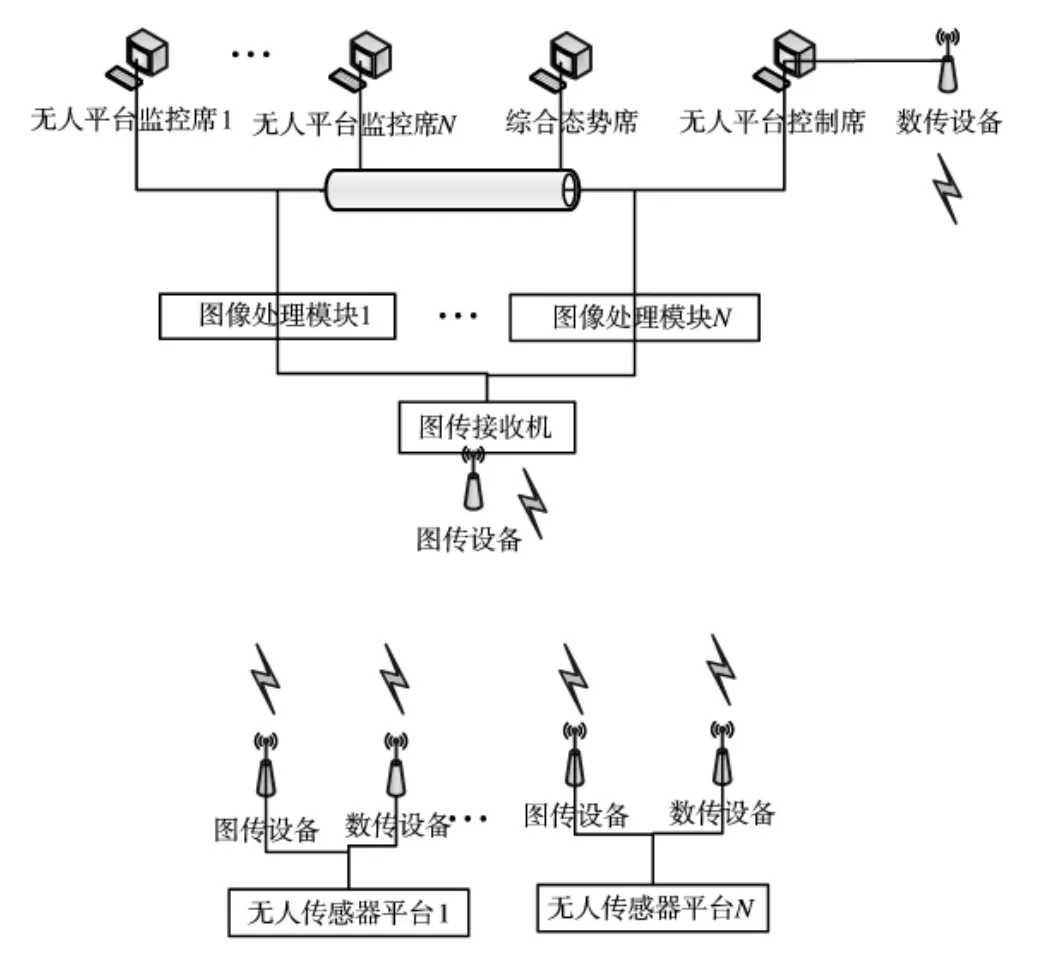
圖2 目標(biāo)協(xié)同跟蹤系統(tǒng)連接圖
無(wú)人傳感器平臺(tái)實(shí)物采用無(wú)人偵察車載平臺(tái)作為載體,加裝可見(jiàn)光傳感器云臺(tái)實(shí)現(xiàn)對(duì)戰(zhàn)場(chǎng)的實(shí)時(shí)偵查;加載陀螺儀、行動(dòng)控制器和GPS模塊,實(shí)現(xiàn)對(duì)無(wú)人傳感器平臺(tái)的行動(dòng)控制,以及對(duì)無(wú)人傳感器平臺(tái)的位置、運(yùn)動(dòng)方向、運(yùn)動(dòng)速度、車身俯仰角等狀態(tài)的獲取;加載圖傳設(shè)備和數(shù)傳設(shè)備,實(shí)現(xiàn)實(shí)時(shí)偵查視頻信息的傳輸和指控信息、狀態(tài)信息的交互。
指揮控制中心主要由無(wú)人傳感器平臺(tái)監(jiān)控席位、無(wú)人傳感器平臺(tái)控制席位、綜合態(tài)勢(shì)席位、圖像處理模塊組成,共同完成系統(tǒng)偵查視頻信息的收集、目標(biāo)圖像獲取、目標(biāo)識(shí)別與跟蹤、指令信息交互、狀態(tài)信息交互、目標(biāo)協(xié)調(diào)跟蹤等。
1)無(wú)人傳感器平臺(tái)監(jiān)控席位運(yùn)行圖像監(jiān)控軟件,主要接收、顯示無(wú)人傳感器平臺(tái)實(shí)時(shí)偵查視頻圖像,獲取目標(biāo)圖像信息發(fā)送給圖像處理模塊進(jìn)行目標(biāo)特征提取、目標(biāo)圖像匹配、識(shí)別與跟蹤,并通過(guò)局域網(wǎng)與無(wú)人傳感器平臺(tái)控制席位進(jìn)行信息交互,對(duì)無(wú)人傳感器平臺(tái)進(jìn)行作戰(zhàn)引導(dǎo),指揮控制無(wú)人傳感器平臺(tái)進(jìn)行協(xié)同作業(yè);
2)無(wú)人傳感器平臺(tái)控制席位運(yùn)行無(wú)人傳感器平臺(tái)控制軟件,主要顯示無(wú)人傳感器平臺(tái)實(shí)時(shí)狀態(tài),對(duì)無(wú)人傳感器平臺(tái)進(jìn)行自動(dòng)和人工兩種模式的遠(yuǎn)程操控;
3)綜合態(tài)勢(shì)席位運(yùn)行綜合態(tài)勢(shì)軟件,用于規(guī)劃無(wú)人傳感器平臺(tái)運(yùn)行軌跡,且實(shí)時(shí)標(biāo)繪顯示無(wú)人傳感器平臺(tái)當(dāng)前實(shí)際位置。本席位功能可擴(kuò)展,且將來(lái)可以與當(dāng)前陸軍作戰(zhàn)指揮控制系統(tǒng)對(duì)接;
4)圖像處理模塊的圖像處理板由兩片TI TMS320C6678八核DSP與一片Xilinx Virtex-6 FPGA構(gòu)成,F(xiàn)PGA負(fù)責(zé)前級(jí)多路圖像的整合拼接及緩存,DSP負(fù)責(zé)對(duì)圖像進(jìn)行算法處理,實(shí)現(xiàn)視頻圖像轉(zhuǎn)換、目標(biāo)圖像特征提取、目標(biāo)圖像匹配、識(shí)別與跟蹤。
傳輸設(shè)備由圖傳設(shè)備和數(shù)傳設(shè)備組成,分別實(shí)現(xiàn)模擬視頻圖像信息的傳輸和狀態(tài)信息、指令信息的交互。
基于多傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng)流程圖如下頁(yè)圖3所示。獨(dú)立目標(biāo)跟蹤時(shí),綜合態(tài)勢(shì)席規(guī)劃無(wú)人傳感器平臺(tái)運(yùn)行航跡,無(wú)人傳感器平臺(tái)根據(jù)所規(guī)劃的航跡信息實(shí)施偵查任務(wù),并實(shí)時(shí)采集、傳輸偵查視頻圖像;圖像處理模塊接收到偵查視頻圖像后進(jìn)行圖像處理,然后發(fā)送給無(wú)人傳感器監(jiān)控席;無(wú)人傳感器監(jiān)控席接收、顯示偵查視頻圖像,如果發(fā)現(xiàn)目標(biāo),則獲取目標(biāo)圖像,將目標(biāo)圖像信息發(fā)送給圖像處理模塊,圖像處理模塊根據(jù)目標(biāo)圖像信息進(jìn)行目標(biāo)特征提取、目標(biāo)識(shí)別、匹配與跟蹤,最后將跟蹤結(jié)果添加當(dāng)前實(shí)時(shí)視頻圖像中,發(fā)送給無(wú)人傳感器監(jiān)控席;無(wú)人傳感器控制席實(shí)時(shí)接收無(wú)人傳感器平臺(tái)狀態(tài)信息,實(shí)時(shí)接收無(wú)人傳感器平臺(tái)監(jiān)控席發(fā)出的實(shí)時(shí)目標(biāo)位置信息,控制無(wú)人傳感器平臺(tái)運(yùn)行姿態(tài)進(jìn)行連續(xù)目標(biāo)跟蹤。協(xié)同目標(biāo)跟蹤分為接替目標(biāo)跟蹤和聯(lián)合目標(biāo)跟蹤,是在獨(dú)立目標(biāo)跟蹤的基礎(chǔ)上,無(wú)人傳感器監(jiān)控席間進(jìn)行信息交互,實(shí)現(xiàn)目標(biāo)圖像信息自動(dòng)共享,無(wú)人傳感器平臺(tái)自動(dòng)進(jìn)行目標(biāo)跟蹤的過(guò)程。
2 圖像監(jiān)控軟件設(shè)計(jì)與實(shí)現(xiàn)
圖像監(jiān)控軟件組成如圖4,包括視頻圖像處理模塊、目標(biāo)圖像獲取模塊、工作模式轉(zhuǎn)換模塊。主要實(shí)現(xiàn)實(shí)時(shí)偵查視頻圖像的接收、顯示、錄制,與歷史視頻圖像回放,實(shí)現(xiàn)目標(biāo)圖像獲取、保存與發(fā)送,實(shí)現(xiàn)與無(wú)人傳感器平臺(tái)控制軟件進(jìn)行信息交互,實(shí)現(xiàn)與其他圖像監(jiān)控軟件進(jìn)行工作模式信息交互等。軟件流程設(shè)計(jì)如下頁(yè)圖5所示。
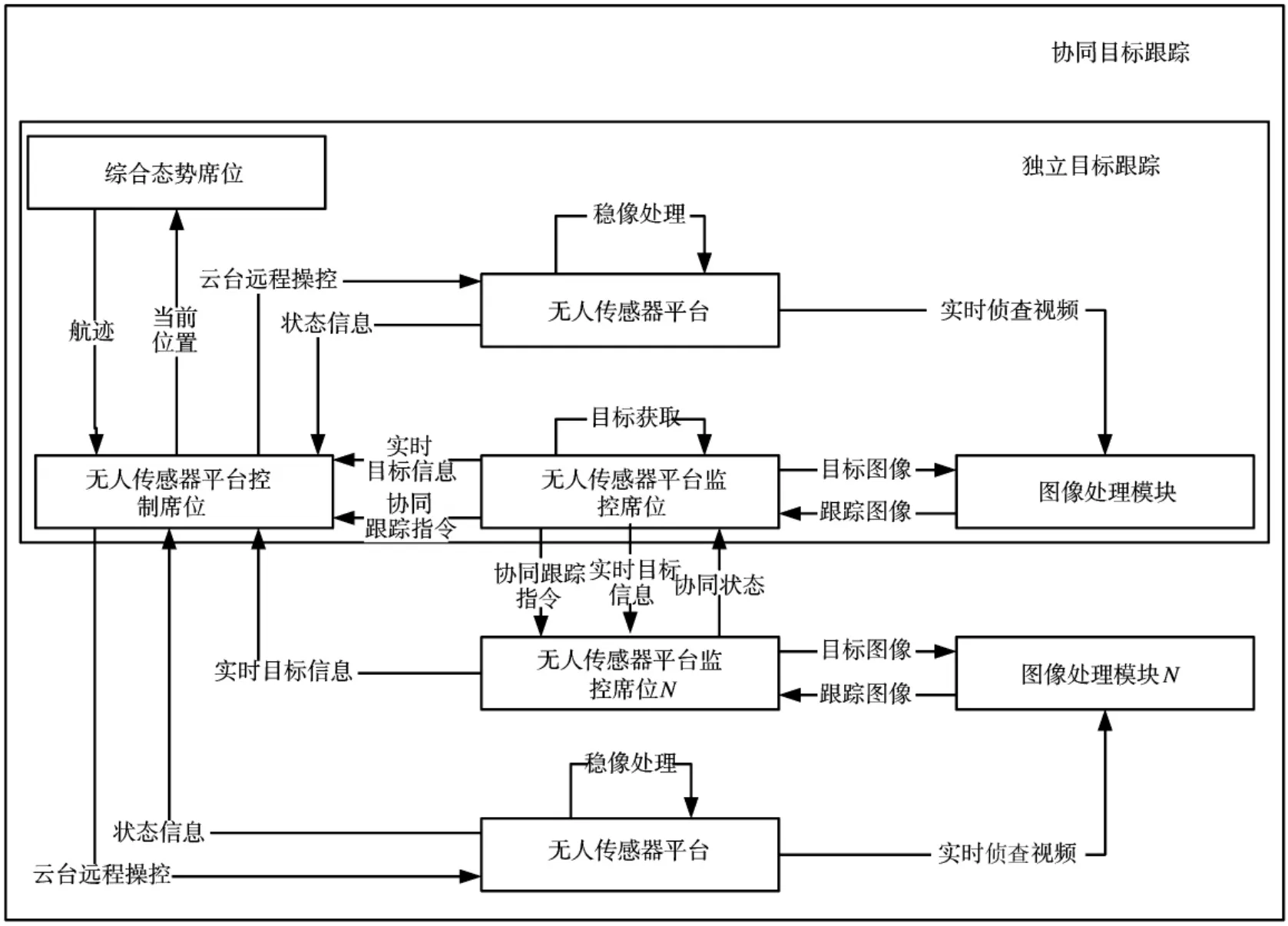
圖3 目標(biāo)協(xié)同跟蹤系統(tǒng)流程圖
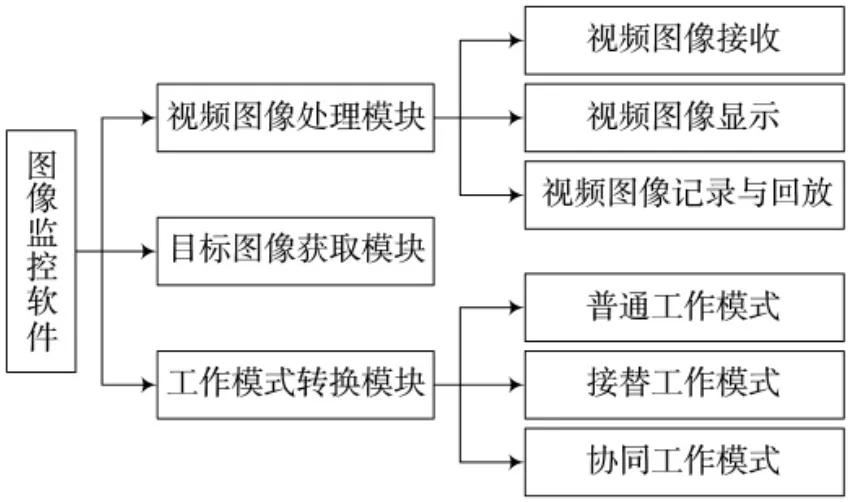
圖4 圖像監(jiān)控軟件組成圖
其中,偵查視頻圖像要求實(shí)時(shí)性高,但允許一定丟包率,所以采用UDP傳輸協(xié)議進(jìn)行傳輸,圖像監(jiān)控軟件采用UDP傳輸協(xié)議進(jìn)行接收;且一幀圖像大小為1 280*1 024,數(shù)據(jù)量大,發(fā)送端采用分包發(fā)送方式發(fā)送幀圖像,圖像監(jiān)控軟件采用分包接收,再數(shù)據(jù)組合的方式進(jìn)行接收;為提高視頻播放速率及節(jié)約計(jì)算機(jī)資源,視頻圖像實(shí)時(shí)顯示采用微軟公司創(chuàng)建的多媒體編程接口DirectX技術(shù);視頻記錄時(shí),可根據(jù)用戶對(duì)視頻圖像信息的完整性的不同要求,采用分幀保存方式,即每幀圖像可以保存為原始圖像格式RAW格式,或采用AVI視頻流格式;獲取目標(biāo)圖像時(shí),為保證目標(biāo)圖像數(shù)據(jù)的精確性,采用根據(jù)目標(biāo)圖像在原視頻圖像中的位置直接從內(nèi)存中獲取的方式。
基于多傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng)有3種工作模式,分別是普通模式、接替模式和協(xié)同模式。普通模式指各無(wú)人傳感器平臺(tái)單獨(dú)進(jìn)行偵查行動(dòng),進(jìn)行目標(biāo)識(shí)別、匹配與跟蹤;接替模式指一臺(tái)無(wú)人傳感器平臺(tái)成功跟蹤目標(biāo),其圖像監(jiān)控軟件發(fā)出接替指令后,另一臺(tái)無(wú)人傳感器平臺(tái)根據(jù)前一臺(tái)無(wú)人傳感器平臺(tái)跟蹤結(jié)果和目標(biāo)信息,繼續(xù)對(duì)原目標(biāo)進(jìn)行識(shí)別、匹配與跟蹤;協(xié)同模式指一臺(tái)無(wú)人傳感器平臺(tái)成功跟蹤目標(biāo),其圖像監(jiān)控軟件發(fā)出協(xié)同指令后,所有無(wú)人傳感器平臺(tái)自動(dòng)識(shí)別跟蹤同一目標(biāo)。
2.1 普通工作模式
各圖像監(jiān)控軟件間不進(jìn)行信息交互,實(shí)時(shí)接收、顯示各自所監(jiān)控的無(wú)人傳感器平臺(tái)采集的偵查視頻圖像,然后在偵查視頻圖像中獲取目標(biāo)圖像信息,并發(fā)送給相應(yīng)圖像處理板進(jìn)行目標(biāo)特征提取、目標(biāo)識(shí)別、匹配與跟蹤。如果匹配跟蹤成功,圖像監(jiān)控軟件顯示跟蹤結(jié)果,即在實(shí)時(shí)偵查視頻圖像中標(biāo)注目標(biāo)圖像,并將目標(biāo)位置信息發(fā)送給無(wú)人傳感器控制軟件,無(wú)人傳感器控制軟件根據(jù)目標(biāo)位置信息實(shí)時(shí)調(diào)整無(wú)人傳感器平臺(tái)運(yùn)行姿態(tài),保持對(duì)目標(biāo)的持續(xù)跟蹤狀態(tài)。
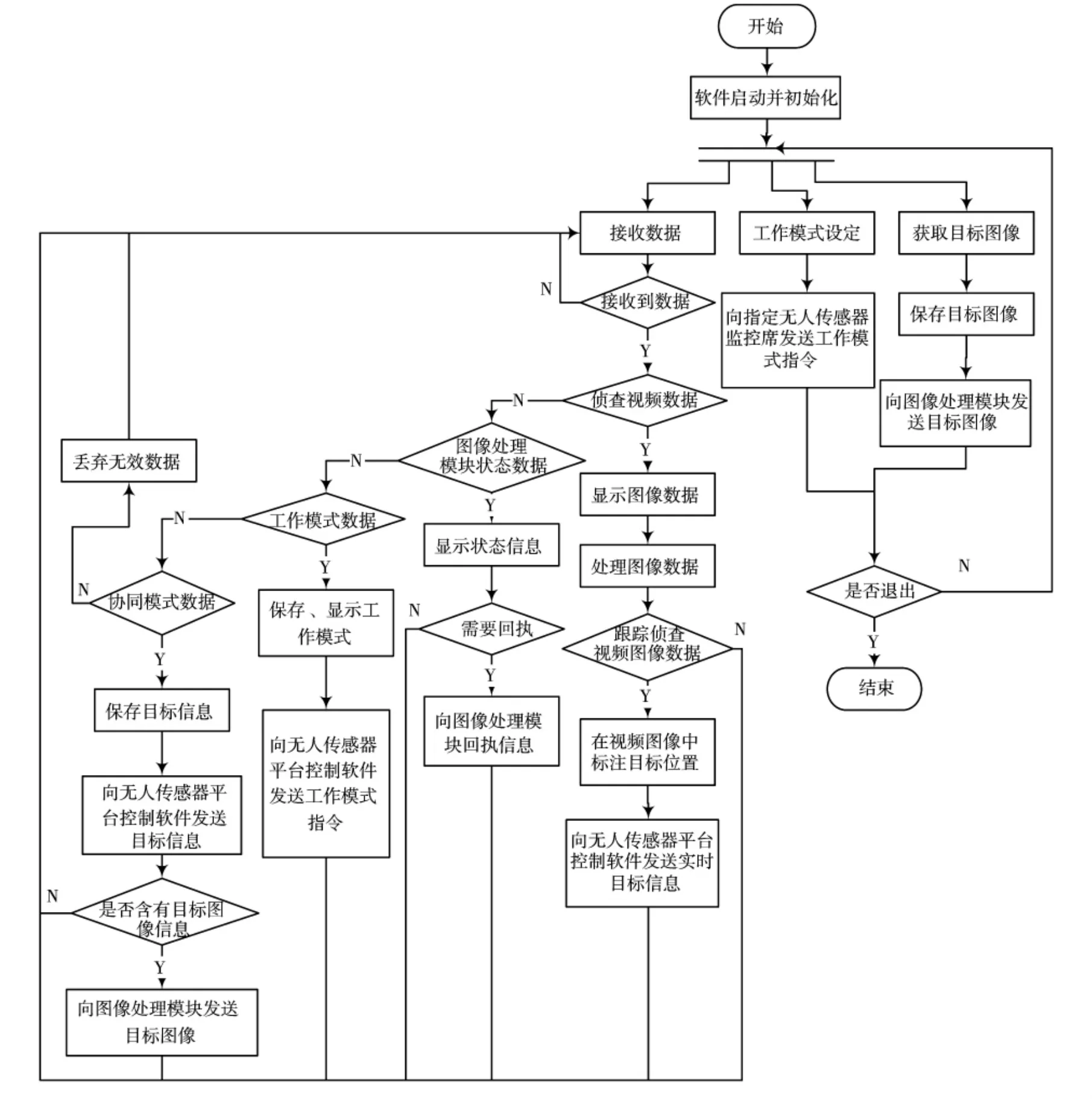
圖5 圖像監(jiān)控軟件設(shè)計(jì)流程圖
2.2 接替工作模式
一臺(tái)無(wú)人傳感器平臺(tái)(被接替無(wú)人傳感器平臺(tái))采用普通工作模式成功跟蹤目標(biāo),其圖像監(jiān)控軟件實(shí)時(shí)顯示跟蹤結(jié)果。當(dāng)根據(jù)目標(biāo)運(yùn)動(dòng)方向及在視場(chǎng)中的位置判斷目標(biāo)將離開此無(wú)人傳感器平臺(tái)跟蹤范圍時(shí),圖像監(jiān)控軟件向在該目標(biāo)運(yùn)動(dòng)方向的另一臺(tái)無(wú)人傳感器平臺(tái)(接替無(wú)人傳感器平臺(tái))的圖像監(jiān)控軟件發(fā)送接替指令和當(dāng)前目標(biāo)圖像信息,向無(wú)人傳感器平臺(tái)控制軟件發(fā)送接替指令。接替無(wú)人傳感器平臺(tái)的圖像監(jiān)控軟件接收到接替指令和當(dāng)前目標(biāo)圖像后,向其圖像處理板發(fā)送目標(biāo)圖像,圖像處理板進(jìn)行目標(biāo)圖像特征提取、目標(biāo)識(shí)別、匹配與跟蹤。跟蹤成功,則圖像監(jiān)控軟件顯示目標(biāo)跟蹤結(jié)果,在偵查視頻圖像中標(biāo)注目標(biāo)圖像位置,即接替跟蹤成功,接替無(wú)人傳感器平臺(tái)持續(xù)跟蹤當(dāng)前目標(biāo);匹配失敗,則在圖像監(jiān)控軟件當(dāng)前狀態(tài)中顯示目標(biāo)匹配失敗,即接替跟蹤失敗。
2.3 協(xié)同工作模式
一臺(tái)無(wú)人傳感器平臺(tái)采用普通工作模式成功跟蹤目標(biāo),其圖像監(jiān)控軟件實(shí)時(shí)顯示偵查視頻圖像并在視頻圖像中標(biāo)注目標(biāo)圖像位置。當(dāng)根據(jù)目標(biāo)運(yùn)動(dòng)速度、軌跡及在視場(chǎng)中的位置判斷目標(biāo)運(yùn)動(dòng)速度快且運(yùn)動(dòng)軌跡多變時(shí),圖像監(jiān)控軟件通播協(xié)同跟蹤指令和當(dāng)前目標(biāo)圖像信息。各圖像處理板接收目標(biāo)圖像信息后進(jìn)行目標(biāo)特征提取、目標(biāo)識(shí)別、匹配與跟蹤,各圖像監(jiān)控軟件實(shí)時(shí)顯示跟蹤結(jié)果,各無(wú)人傳感器平臺(tái)開始實(shí)時(shí)跟蹤目標(biāo)。
3 實(shí)驗(yàn)結(jié)果
實(shí)驗(yàn)條件:3臺(tái)無(wú)人偵察車(無(wú)人偵察車1、無(wú)人偵察車2、無(wú)人偵察車3)、3塊圖像處理板(圖像處理板1、圖像處理板2、圖像處理板3),3個(gè)無(wú)人傳感器平臺(tái)監(jiān)控席(無(wú)人傳感器平臺(tái)監(jiān)控席1、無(wú)人傳感器平臺(tái)監(jiān)控席2、無(wú)人傳感器平臺(tái)監(jiān)控席3)、1個(gè)無(wú)人傳感器平臺(tái)控制席、1個(gè)綜合態(tài)勢(shì)席、1套圖傳設(shè)備、1套數(shù)傳設(shè)備、1個(gè)交換機(jī)、1輛銀灰色汽車、1輛白色汽車、1架無(wú)人機(jī)。
3.1 試驗(yàn)1:普通工作模式
試驗(yàn)過(guò)程:
1)銀灰色汽車以一定速度沿曲折小路行駛;
2)無(wú)人偵察車1采用普通工作模式進(jìn)行戰(zhàn)場(chǎng)偵查,無(wú)人傳感器平臺(tái)監(jiān)控席1顯示實(shí)時(shí)偵查視頻圖像;
3)當(dāng)銀灰色汽車行駛至無(wú)人偵察車1云臺(tái)視場(chǎng)內(nèi),無(wú)人傳感器平臺(tái)監(jiān)控席1獲取目標(biāo)圖像,將目標(biāo)圖像發(fā)送給圖像處理板1;
4)圖像處理板1進(jìn)行目標(biāo)特征提取、目標(biāo)識(shí)別、匹配與跟蹤,并將跟蹤結(jié)果信息加入實(shí)時(shí)視頻圖像信息中,發(fā)送給無(wú)人傳感器平臺(tái)監(jiān)控席1;
5)無(wú)人傳感器平臺(tái)監(jiān)控席1顯示實(shí)時(shí)視頻及目標(biāo)位置,并將目標(biāo)位置信息發(fā)送給無(wú)人傳感器平臺(tái)控制席;
6)無(wú)人傳感器平臺(tái)控制席根據(jù)目標(biāo)位置信息實(shí)時(shí)調(diào)整無(wú)人偵察車1運(yùn)行姿態(tài),保持對(duì)目標(biāo)的跟蹤狀態(tài);
7)無(wú)人傳感器平臺(tái)監(jiān)控席1記錄實(shí)時(shí)視頻圖像,暫停跟蹤顯示歷史記錄圖像。
試驗(yàn)結(jié)果:
試驗(yàn)結(jié)果如圖6所示。當(dāng)銀灰色汽車運(yùn)動(dòng)速度小于目標(biāo)協(xié)同跟蹤系統(tǒng)對(duì)目標(biāo)的反應(yīng)速度時(shí),目標(biāo)協(xié)同跟蹤系統(tǒng)可以較好地實(shí)現(xiàn)普通工作模式下的目標(biāo)識(shí)別、匹配與跟蹤;圖像監(jiān)控軟件視頻圖像處理模塊、目標(biāo)圖像獲取模塊、工作模式轉(zhuǎn)換模塊運(yùn)行正確。

圖6 普通工作模式下的目標(biāo)跟蹤結(jié)果
3.2 試驗(yàn)2:接替工作模式
試驗(yàn)過(guò)程:
1)白色汽車以一定速度沿曲折小路行駛;
2)采用普通工作模式,無(wú)人偵察車1成功跟蹤目標(biāo)(白色汽車),無(wú)人傳感器平臺(tái)監(jiān)控席1實(shí)時(shí)顯示偵查視頻圖像及目標(biāo)圖像位置;
3)當(dāng)白色汽車可能脫離無(wú)人偵察車1跟蹤范圍時(shí),無(wú)人傳感器平臺(tái)監(jiān)控席1向位于目標(biāo)行駛方向的無(wú)人傳感器平臺(tái)監(jiān)控席2發(fā)出接替工作模式指令,并將當(dāng)前目標(biāo)圖像發(fā)送給無(wú)人傳感器平臺(tái)監(jiān)控席2;
4)無(wú)人傳感器平臺(tái)監(jiān)控席2接收到接替工作模式指令后將轉(zhuǎn)換工作狀態(tài),接收到目標(biāo)圖像信息立即轉(zhuǎn)發(fā)給圖像處理板2;
5)圖像處理板2進(jìn)行目標(biāo)特征提取、目標(biāo)識(shí)別、匹配與跟蹤,并將跟蹤結(jié)果信息加入實(shí)時(shí)視頻圖像信息中,發(fā)送給無(wú)人傳感器平臺(tái)監(jiān)控席2;
6)無(wú)人傳感器平臺(tái)監(jiān)控席2顯示實(shí)時(shí)視頻及目標(biāo)位置,并將目標(biāo)位置信息發(fā)送給無(wú)人傳感器平臺(tái)控制席;
7)無(wú)人傳感器平臺(tái)控制席根據(jù)目標(biāo)位置信息實(shí)時(shí)調(diào)整無(wú)人偵察車2運(yùn)行姿態(tài),保持對(duì)目標(biāo)的實(shí)時(shí)跟蹤狀態(tài);
8)無(wú)人傳感器平臺(tái)監(jiān)控席2可記錄實(shí)時(shí)視頻圖像,暫停跟蹤顯示歷史記錄圖像。
試驗(yàn)結(jié)果:
試驗(yàn)結(jié)果如圖7所示,無(wú)人偵察車2可以成功接替無(wú)人偵察車1,對(duì)無(wú)人偵察車1成功跟蹤的目標(biāo)進(jìn)行再次持續(xù)跟蹤;圖像監(jiān)控軟件視頻圖像處理模塊、目標(biāo)圖像獲取模塊、工作模式轉(zhuǎn)換模塊運(yùn)行正確。

圖7 接替工作模式下的目標(biāo)跟蹤結(jié)果
3.3 試驗(yàn)3:協(xié)同工作模式
試驗(yàn)過(guò)程:
1)無(wú)人機(jī)以一定速度飛行,且運(yùn)動(dòng)軌跡多變;
2)采用普通工作模式,無(wú)人偵察車1成功跟蹤目標(biāo)(無(wú)人機(jī)),無(wú)人傳感器平臺(tái)監(jiān)控席1實(shí)時(shí)顯示偵查視頻圖像及目標(biāo)圖像位置;
3)當(dāng)根據(jù)目標(biāo)運(yùn)動(dòng)速度、軌跡及在視場(chǎng)中的位置判斷目標(biāo)運(yùn)動(dòng)速度快且運(yùn)動(dòng)軌跡多變時(shí),無(wú)人傳感器平臺(tái)監(jiān)控席1發(fā)出協(xié)同工作模式指令,通播當(dāng)前目標(biāo)圖像信息;
4)無(wú)人傳感器平臺(tái)監(jiān)控席2、無(wú)人傳感器平臺(tái)監(jiān)控席3接收到協(xié)同工作模式指令后,將轉(zhuǎn)換各自工作狀態(tài);
5)圖像處理板2、圖像處理板3接收到目標(biāo)圖像信息后,進(jìn)行目標(biāo)特征提取、目標(biāo)識(shí)別、匹配與跟蹤,并將跟蹤結(jié)果信息加入實(shí)時(shí)視頻圖像信息中,發(fā)送給無(wú)人傳感器平臺(tái)監(jiān)控席2、無(wú)人傳感器平臺(tái)監(jiān)控席3;
6)無(wú)人傳感器平臺(tái)監(jiān)控席2、無(wú)人傳感器平臺(tái)監(jiān)控席3分別顯示各自實(shí)時(shí)視頻及目標(biāo)位置,并將目標(biāo)位置信息分別發(fā)送給無(wú)人傳感器平臺(tái)控制席;
7)無(wú)人傳感器平臺(tái)控制席根據(jù)各自目標(biāo)位置信息實(shí)時(shí)調(diào)整無(wú)人偵察車2、無(wú)人偵察車3運(yùn)行姿態(tài),保持對(duì)目標(biāo)的實(shí)時(shí)跟蹤狀態(tài);
8)無(wú)人傳感器平臺(tái)監(jiān)控席2、無(wú)人傳感器平臺(tái)監(jiān)控席3可分別記錄各自實(shí)時(shí)視頻圖像,暫停跟蹤顯示各自的歷史記錄圖像。

圖8 協(xié)同工作模式下的目標(biāo)跟蹤結(jié)果
試驗(yàn)結(jié)果:
試驗(yàn)結(jié)果如圖8所示,無(wú)人偵察車1、無(wú)人偵察車2、無(wú)人偵察車3可以很好地協(xié)同跟蹤運(yùn)動(dòng)速度快且運(yùn)動(dòng)軌跡多變的目標(biāo)。圖像監(jiān)控軟件的視頻圖像處理模塊、目標(biāo)圖像獲取模塊、工作模式轉(zhuǎn)換模塊在各無(wú)人傳感器平臺(tái)監(jiān)控席運(yùn)行正確。
4 結(jié)論
本文設(shè)計(jì)的基于多傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng),主要由無(wú)人傳感器平臺(tái)、指揮控制中心、傳輸設(shè)備組成。該系統(tǒng)能夠在復(fù)雜的戰(zhàn)場(chǎng)環(huán)境中實(shí)現(xiàn)對(duì)動(dòng)態(tài)目標(biāo)的獨(dú)立或聯(lián)合監(jiān)控與跟蹤,為進(jìn)一步研究基于微波、毫米波、紅外、可見(jiàn)光等混合多源傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng)提供一定的參考價(jià)值。設(shè)計(jì)的圖像監(jiān)控軟件經(jīng)實(shí)驗(yàn)驗(yàn)證,流程設(shè)計(jì)合理,功能完善,能夠很好地滿足基于多傳感器的目標(biāo)協(xié)同跟蹤系統(tǒng)需求,為后續(xù)系統(tǒng)研究奠定了基礎(chǔ)。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32